基于3D扫描技术与无人机立面航飞摄影的建筑物局部虚拟建模
2023-11-22杜广志
杜广志 刘 伟
(1.平湖市城工建设测绘设计有限责任公司 浙江平湖 314200;2.嘉善衡实测绘有限公司 浙江嘉兴 314100)
1 引言
VR 融合了人机接口、仿真、传感、多媒体、网络及计算机图形等多项技术,包含传感设备、自然技能、感知及模拟环境[1,2]。通过计算机模拟能将现实世界表达成真实且立体的三维立体图像,即虚拟世界。在传统三维建模中,实地采集数据会消耗大量的人力、物力及时间,构建三维模型也极其复杂[3]。
为解决此类问题,姚习红等人[4]提出利用三维激光扫描数据构建建筑物立面窗户模型,虽能在采集数据时相对节省人力,但在拍摄过程中角度单一,不足以完成多角度的数据采集,且构建后模型细节模糊,不能与真实场景相符;曹林等人[5]提出基于倾斜摄影线特征的建筑物模型快速重构方法,虽然在数据采集方面角度多变,但在构建模型时,模型墙体出现扭曲,棱角不分明现象,精度较弱。
因此,本文提出基于无人机立面航飞摄影的建筑物局部虚拟建模研究,通过无人机减少人力消耗,实现半自动化三维建模,并能确保模型的精准度。
2 建筑物局部虚拟建模
2.1 无人机立面航飞摄影数据采集
为采集无人机立面航飞摄影数据,利用棋盘格标定法,采用无人机立面航飞拍摄。选取方格边长为10mm 的定制标定板,通过铝制材料确保其精准度[6]。拍摄若干张图像后,利用各图像的单位矩阵,计算无人机立面航飞摄像头的畸变参数。设J=[a,b,c,1]τ为空间内任意点坐标,则j=[a',b',1]τ代表与其相应的畸形图像坐标。以平面标定法为基础,空间内任意点及其相应的畸形图像映射关联式为:
其中,单独比例因子用κ描述;摄像头中参数矩阵用ϑ描述。旋转矩阵及位移关联矩阵分别用ρ,γ描述。简单转换公式(1)可描述为:
式中,单应性矩阵用ψ描述,无人机摄像头立面内投影点与其对应空间任意点间的关联亦可用式(2)描述。
2.2 点云预处理及三角网构建
2.2.1 点云数据去噪
由于无人机立面航飞摄影获取的数据较为分散,且存在噪声,需对点云数据进行去噪处理,点云数据即将拍摄图片采用3D 扫描仪扫描获取的数据信息[7,8]。针对点云数据去噪时可分为以下三种方式:
(1)对远离中央且聚集性细微点云去噪时,由于其噪声点分明,可手动将其去除;
(2)对远离中央且分散点云去噪时,因点云分散性,手动去除较繁琐[9],可设置坐标轴,取坐标轴内(x,y,z)坐标的极限长短,构成一个包含全部数据点的矩形区域。并在此区域按数据点密度分割为多个正方体,为每一正方体标注数据点序号,设置阈值r= 2,若阈值大于矩形区域内点云数量,则通过删除该立方体数据实现点云数据去噪。
(3)对实际点与噪声点重叠点云去噪时,依据步骤(2)中正方体,计算出全部保留点的全部相邻点(a-g),以最小二乘法为基础,结合所有相邻点整合二次曲面为:
设置二次曲面至端点的方位距离阈值,去除大于阈值的端点,保留小于阈值的端点。
2.2.2 三角网格的初始估计
依据局部切平面簇方法,将去噪后点云数据曲面W构建三角网[10],设置去噪后的点云数据A=,H表示初始估计的建筑物表面网格,曲面W至设置点云的有向距离函数用R表达,预期初始面用其零集描述:
因R与W均未知,可依据数据点云估计出函数R的近似函数R͂,曲面W的近似则从其零集中选取,近似后的公式可转换为:
将曲面局部线性近似描述为,对每个点云数据构建一个局部切平面。数据点相邻区域中其余数据点,可估计出每个局部切平面的中心点o与单位法向量n。随机数据点p至局部切平面的有向距离为:
因随机点p与点p最近的局部切平面间距,可描述曲面W至空间随机点p的近似距离,所以点p至此切平面的中心距离最短。即:
依据曲面绘制经典算法Marching cubes,通过公式(7)结果,计算并提取等值面,初始估计点云数据后即可获得三角网格模型。
2.2.3 三角网格的优化
依据去噪后点云数据A与初始估计的建筑物表面网格H,获取与去噪后点云数据曲面W最接近的优化三角网格H',表达公式为:
公式(8)中,网格节点集由S={s1,s2,…,su}描述,网格中节点间连接状态,即单纯复形用T描述,网格表面用σs( |T|)描述,网格优化系数用β描述,网格内节点数量用u描述,弹性常量用ϑ描述。网格至全部数据点的距离平方和用Id(T,S)描述,u与Ir(T)为正比关系,以此对之前的优化结果进行限制。简化网格需增大系数βu,但增大该系数会降低网格的准确性,而Ir(T)的限制能力由系数ϑ确定。
2.3 建筑物局部三维建模
本文针对建筑物局部进行虚拟建模,所以从建筑物中主要选取墙体进行局部虚拟建模。具体建模步骤如下:
首先是对部分墙体建模,当对某部分建模时,首先将这部分冻结,其他部分全部隐藏起来,然后从其他三个视图对其进行建模,这样就便于查看和建模,也可以避免对其他部分的误操作。建模的时候需开启2.5 维捕捉功能,捕捉并冻结墙体,用“样条线”对单面墙(如南墙)进行重画,然后用矩形对南窗进行重画。再在线的“修改器”面板下找到“附加”命令,将所有的窗户和墙体附加在一起,然后运用“挤出”命令,挤出厚度为200mm,最后在顶视图将建好的模型移动到真实位置。同样的方法对其他三面墙体进行建模,并移动到合适的位置。
3 实例分析
以某地区建筑物为研究对象,从数据集中选取部分无装饰部件的立面墙体摄影图像,通过3D 扫描仪扫描后,得到点状数据形式即为点云数据,对比原始点云数据以及预处理去噪后的点云数据,观察去噪后点云数据变化,如图1和图2所示。

图1 原始点云数据
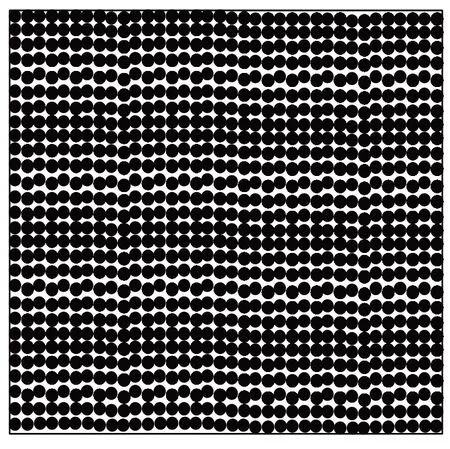
图2 去噪后点云数据
通过本文方法进行去噪后(如图2),在不丢失原始点云数据的情况下,点云数据分布均匀,无重叠,无缺失现象,更贴近于真实墙体图像。
依据去噪后点云数据构建初始三角网格结构复杂,为便于建筑物建模,本文方法对三角网格进行优化。三角网格模型优化,就是生成原始三角网格模型的低分辨率的三角网格模型表示的方法,即在尽可能保持原始三角网格模型特征的情况下,最大限度地减少原始模型的三角形和顶点数目。设置网格优化系数β为306,选取弹性常量ϑ为301,303,305,306,307,309的6次优化结果。如图3、图4所示。
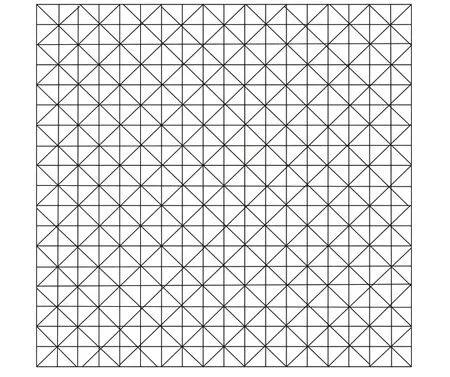
图3 初始三角网格
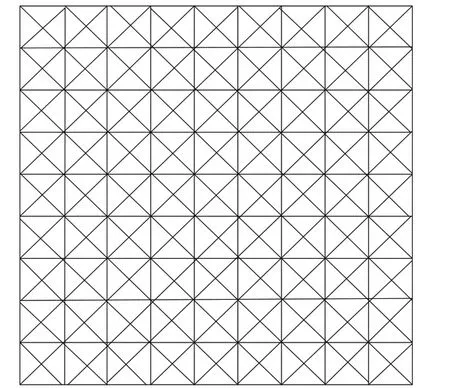
图4 优化后三角网格
优化后的三角网格不会调整初始拓扑结构同时,能有效降低三角面片数量,使三角网格简易且清晰。
实验采用文献[4]的基于三维激光扫描数据的建模方法、文献[5]基于倾斜摄影线特征的建模方法与本文方法对建筑物墙体建模,选取局部墙体建模进行分析,验证本文方法建模的可行性,局部墙体建模结果如图5、图6所示。

图5 文献[4]方法局部墙体建模

图6 文献[5]方法局部墙体建模
观察图5,通过文献[4]方法对墙体建模,边缘墙体与窗口连接处严重变形且模糊,中心位置窗口轻微模糊;图6 为通过文献[5]方法对墙体建模,每个窗口与墙体连接处均模糊,窗口严重扭曲,棱角不够分明;而图7 中通过本文方法对墙体建模时,墙面纹理清晰,且能明显展示墙体边缘及窗口棱角,本文方法的局部墙体建模效果最好。

图7 本文方法局部墙体建模
为更精准地对建筑物局部模型进行评估,实验结合无人机立面航飞摄影,在实地拍摄时选取8 个特征点,并将与该点对应的经度与纬度进行记录,将实地特征点与建筑模型对应点,通过经度差与纬度差进行评估,如表1所示。
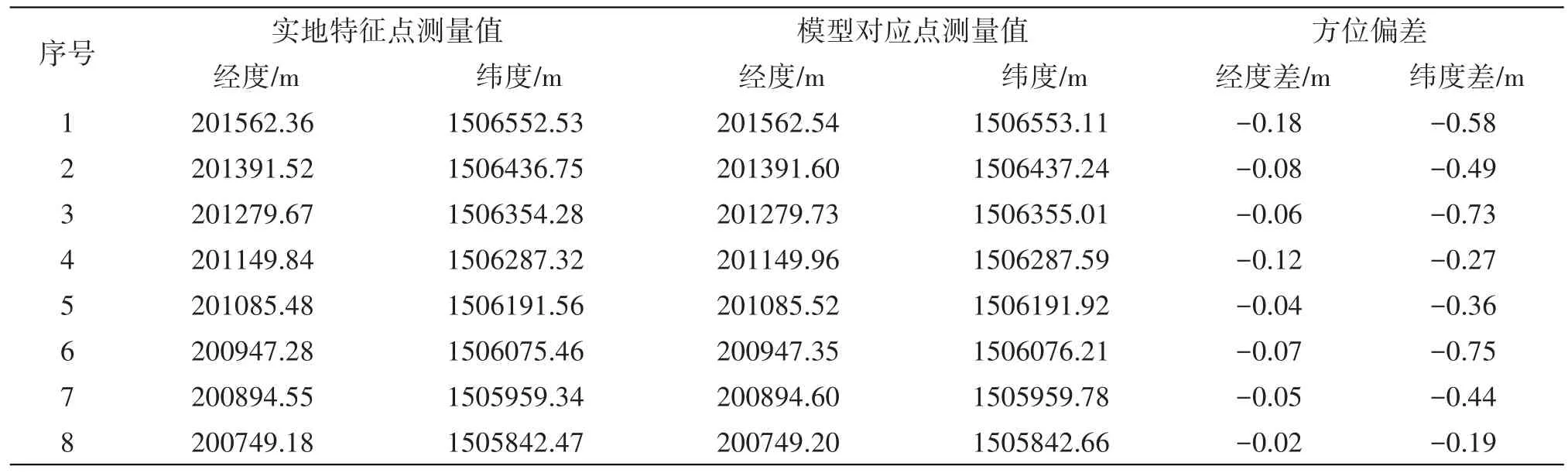
表1 实地与模型特征点方位偏差对比
通过对实地不同特征点及模型对应点的经纬度统计及方位偏差计算,经度差不超过-0.2m,纬度差不超过-0.8m。依据国家无人机航飞摄影测量规范规定,平面测量精度误差区间为±1.4m,因此本文所述方法对建筑物局部建模平面精度符合立面摄影测量规范。
4 结束语
本文提出基于无人机立面航飞摄影的建筑物局部虚拟建模研究,利用无人机立面航飞摄影技术采集数据,通过3ds Max 对建筑物局部墙体进行建模。实验结果表明,采用本文所述方法对图像进行去噪时,点云数据分布均匀,更贴近真实图像进行,优化后的网格能够有效减少多余三角面片,更好地表现建筑物的外形特征。