基于三维激光扫描技术的塔形建筑数字化重建
2023-11-21姚雪妃李小梅
姚雪妃 李小梅*
(广东省国土资源测绘院,广东 广州 510000)
近年来,随着测绘科学技术的发展以及多学科交叉融合程度的不断加深,以前的工业化时代正在向信息化时代转变,其中数字城市是信息化时代的基本标志之一,构建数字城市的底层数字基座就是实景模型重建。基础测绘规划中明确表示打造实景三维中国,将物理城市中地上下各类对象进行数字化,建立实景模型[1]。三维激光扫描技术作为一种全自动立体扫描技术,能够快速直接采集物体表面的三维坐标信息,具有精度高、非接触测量、受外界因素干扰小等优势,相比传统测绘手段,不仅提高了建筑测绘的效率,且依托点云数据能够构建三维模型,直观地展示出建筑实际情况[2],因此利用三维激光扫描技术完成建筑物三维重建逐渐成为数字城市的热点。但当前以塔形建筑为对象的案例较少,本文通过案例研究基于三维激光扫描技术的塔形建筑物数字化重建,阐述三维激光扫描技术的工作流程,探讨塔形建筑物的数字化重建方法,并最终完成三维展示,为三维激光扫描技术在塔形建筑测绘的应用提供参考。
1 三维激光扫描技术
三维激光扫描技术又称实景复制技术,是包含多个技术的新测量手段,激光测距是关键技术之一,分为激光三角法、干涉测距法和脉冲测距法三种。现在的扫描仪往往以脉冲测距法为主,令发射器发出脉冲信号,记录信号打到物体表面再返回至仪器的时间Δt,求出目标与扫描仪中心的距离S,其中C为光速。
另外精密时钟控制编码器会同步记录每个激光脉冲的横向扫描角度值α和纵向扫描角度值θ。该系统均为站心坐标系,仪器中心为坐标原点,垂直方向为Z轴,X轴垂直于Z轴且位于水平面,Y轴与X、Z轴构成右手直角坐标系。由此可以得到目标点P的坐标计算公式[3]:
2 工程案例
2.1 技术路线
研究对象为某塔形建筑物,周边较为空旷,采用的仪器为Trimble TX8激光扫描仪,该仪器能够以每秒百万个激光点的速度获取数据,视场角为360°×317°,最大射程为120 m,点精度为1 mm,能够满足实验数据获取的要求。结合三维激光扫描技术的具体工作内容,总结了三维激光扫描技术在古建筑测量的工作流程。
整体技术路线如图1所示。
2.2 古建筑点云数据采集
为了减少不必要的错测和漏测,在扫描工作开始前首先要进行实地踏勘,掌握现场情况,明确扫描的范围,同时收集附近可用的控制点和水准点等数据,若控制点数不足4个,则需要根据《城市测量规范》(CJJ/T 8—2011)、《工程测量规范》(GB 50026—2007)、《地面三维激光扫描作业技术规程》(CH/Z 3017—2015) 等规范要求布设平高控制点[4-6]。测区遮挡物较少,卫星信号良好,此次采用GNSS RTK的测量方法布设控制点,控制测量结束后还需要进行复测,检查是否可用。扫描采用前后交替的形式进行环形架站,通过布置靶球完成前后站的连接,相邻站点间要摆放靶球多于3个,另外靶球摆放要均匀布置,避免在同一高度或同一平面内的情况,且位置应选在特征明显的地方,以便及时恢复靶球的位置。站点位置的选择以保证人员和仪器安全为主,其次根据建筑的特点,保证扫描距离在扫描仪的有效测程内,并实现对建筑物的多角度扫描,特别是建筑物顶部,由于高度过高,需要远距离架设扫描仪,尽可能保证建筑物上半部分的完整性。站点布设应保证均匀,在确保相邻测站间确保重叠度在30%以上的前提下减少测站数目,进而减少测站配准的累积误差。扫描结束后还需要进行影像数据采集,为后续建模提供照片参考。
2.3 点云数据处理
外业扫描已经成功获取建筑物的点云数据,但还需要经过一系列预处理步骤,主要包括点云拼接、点云去噪、点云抽稀和坐标转换。
2.3.1 点云拼接
由于单站扫描视角有限,难以获取完整的建筑点云数据,因此需要架设多个测站,而将这些不同测站的点云数据拼接在同一坐标系后,才能得到完整的点云数据。点云拼接的方法可以分为基于标靶拼接和无标靶拼接,基于标靶拼接是拟合靶球的重心作为公共点,并以此作为控制点进行参数转换,完成前后两站的拼接;无标靶拼接则是选择特征明显的同名点,采用先粗拼接再精拼接的方法实施,具体实施手段是先通过手动选取同名点,为两站数据提供一个较好的初始位置,之后通过ICP算法实现精确拼接[7]。由于本实验是采集建筑的外表面,测量时均布置了靶球,故而选择基于标靶拼接的方法完成测站数据的拼接。
2.3.2 点云去噪
三维激光扫描仪能够快速获取海量点云数据,但获取的点云容易因为周边环境或物体表面材质等因素的影响,从而产生错误或不属于建筑物本身的噪声点。为了保证数据的准确性和时效性,还需对点云数据进行去噪处理,防止误判点云的局部特征。通常噪声点可以分为四种[8],即偏离主体建筑的漂移点、远离中心区域且小而密集的孤立点、超出扫描区域的无用点、与主体混淆的混杂点,前三类可通过人机交互的方式人工选取噪声点剔除,第四类可以利用算法消除噪声点。
2.3.3 点云抽稀
庞大的点云数据不利于后期进行储存、处理和应用等操作,因此需要抽稀点数,对点云数据进行降采样,常见的采样方法有空间采样和随机采样。本实验根据建筑物特征和点云数据的质量,以1 cm为阈值,选用空间采样的方式减少数据量,最终点数由38 057 750降为4 645 300。
2.3.4 坐标转换
由于三维激光扫描仪为站心坐标系,因此还需进行坐标转换,将点云转换到CGCS2000坐标系下。利用Realworks软件的地理坐标转换功能即可实现点云数据的坐标转换。最终预处理完成后的点云数据如图2所示。
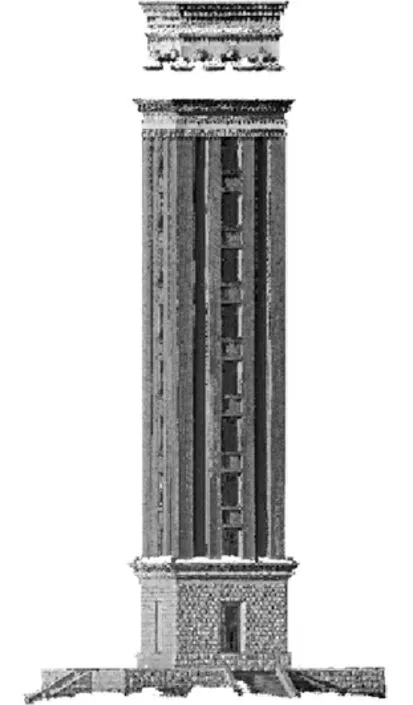
图2 塔形建筑点云
2.4 古建筑三维重建
内业数据处理完成后,可通过第三方建模软件进行基于点云的三维建模工作,常用软件有3Dmax和Sketch UP,但考虑到此次实验对象结构较规则,形状较为方正,因此选择Sketch UP软件完成建筑物的模型重建。依托天宝点云扫描插件可以将点云数据导入Sketch UP软件,之后选择合适的视图用矩形和推拉工具画出底部框架,转换视角参照点云进行细节处修改,使模型与点云匹配,待底部模型构建完成,继续向上推拉,同时可利用偏移复制和路径跟随命令画出环绕塔身的突出部分,直至完成整个模型。为了使模型的观感效果更逼真,还需要进行纹理映射,即根据影像数据裁剪出建筑物的真实材质,并赋予模型。为了更好地对建筑物进行数字化存档,还可以生成二维线画图。塔形建筑物三维模型及二维线画图如图3所示。
除了数据存档外,为了更好地应用建筑三维模型,还可以将模型导入Easyearth三维平台,对模型添加漫游,量测、场景分析等功能[9]。
2.5 精度验证
为了检验模型的精度,挑选窗户、门以及底部承台等特征物,其测量数据与精度对比如表1所示。
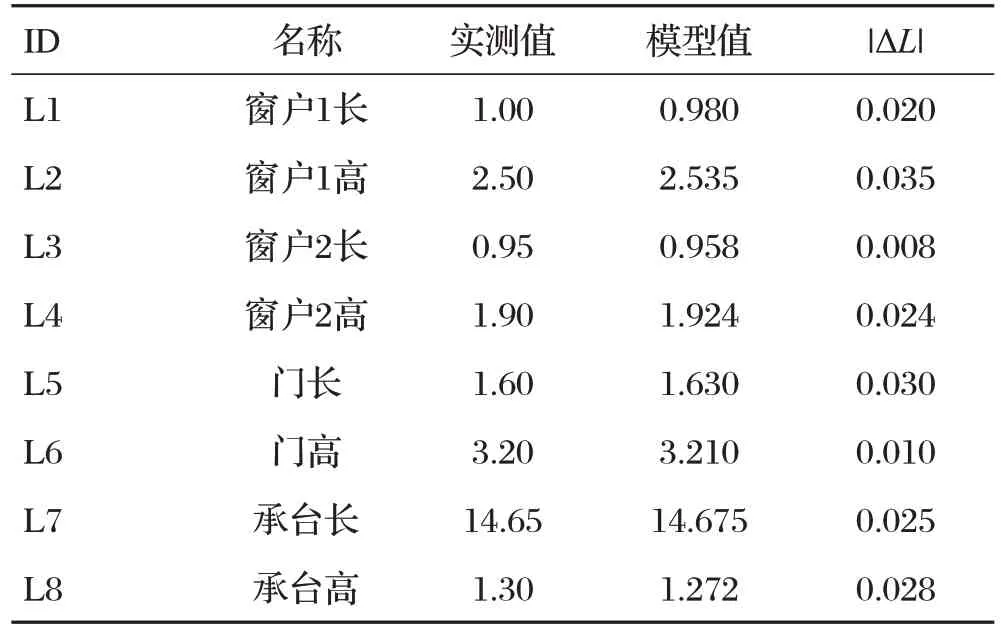
表1 测量数据与精度对比 单位:m
通过表中数据可以看出,模型值与实测值的差值ΔL均不超过5 cm,且计算出中误差为2.4 cm,符合精度要求,验证了模型构建的有效性。
3 结语
精细化实景三维模型是市政规划设计和建设的重要基础地理信息资源,其高精度、高真实感的优点结合可量测影像与信息管理系统,能够帮助城市的规划、建设、管理、运行和服务。三维激光扫描技术能够真实准确地表达出建筑对象地形态结构和特性,可以最大限度地还原数字场景与物理世界的相似度,为三维数字城市建设提供了有效手段。针对塔形建筑的数字化重建,除了作为数字城市建设的数据底板外,还可以作为存档数据,通过多期对比分析其变化,因此对于三维模型的多方面应用还有待深入研究。
