不倒翁式电磁俘能器的非线性动力学特性研究1)
2023-11-16潘侠圭
潘侠圭 余 宁 严 博
(浙江理工大学机械工程学院,杭州 310018)
引言
建设海洋强国是我国走向世界强国的必由之路.随着物联网技术发展,海洋环境监测的需求愈发迫切.为实现海洋环境的持续监测,通常需要在海洋中布置各类传感器以监测海洋环境数据.然而,传感器的长期稳定运行需要消耗大量的能量[1].因此,为低功耗传感节点提供可持续的能源供给以保证其稳定运行是实现海洋环境监测系统万物互联的关键[2].
海洋作为地球上最大的自然生态系统之一,不仅孕育了丰富的生命,还蕴藏着丰富的可再生能源,例如,波浪能、潮汐能、太阳能、风能和热能等[3].波浪能因其分布范围广、易于俘获等特点被视为最具前景的海洋能量[4].然而,海洋波浪具有低频、复杂且随机等特点,因此,如何有效俘获海洋波浪能并高效转化为电能是波浪能俘获的研究重点[5].近年来,研究人员设计了多种可用于俘获低频海洋能的小型化俘能装置,根据机电转化机制,主要有压电效应[6-8]、纳米摩擦发电[9-11]和电磁感应[12-14]等机制.Zou 等[15]提出一种双稳态压电能量采集方法,通过磁耦合的方式构建双稳态特性,进一步提高俘能器俘获水流能量的性能.Zhao 等[16]设计了一种机械智能波浪能俘获系统,使用机械结构对激励进行调控,通过纳米摩擦发电与电磁感应相结合的方式实现对海洋波浪的高效俘获.
电磁结构因其效率高、成本低和结构简单等优点,广泛应用于大型海洋发电站中[17].然而,传统电磁俘能器很难匹配海浪的低频与随机的特性.因此,研究人员设计了摆结构[18-20]、振荡水柱[21-22]、振荡浮子[23]等结构以提高俘能效率.Li 等[24]基于混沌摆结构设计了一种全方向高效率的海洋波浪能俘获系统,并将其集成在海洋观测平台中,实现了能量采集与自供能的海浪传感.Yang 等[25]设计了一种基于同轴机械运动整流器和可变惯量飞轮的波浪能俘能器,以提高输出功率和俘能效率.Cai 等[26]提出了一种双质量摆海洋波浪能俘能器,通过调节摆的两个质量位置实现了频率调节,以适应低频海浪激励.
除了上述结构外,不倒翁作为一种古老的中国儿童玩具,在受到外部激励后会围绕其平衡位置发生往复摆动.受其启发,本课题组前期建立了圆弧基准面上的不倒翁结构的动力学模型,分析了其复杂非线性行为.研究表明,不倒翁结构具有不同于传统结构的超低频振动特性,且其对于低频激励敏感的特点,为在低频振动俘能的潜在应用提供了思路[27].Zhao 等[28]设计了一种不倒翁形状的纳米摩擦电俘能器,用于俘获波浪能.Zhang 等[29]针对水波浪的低频与随机性特点,将单摆与不倒翁结构结合,设计了一种纳米摩擦电俘能器.
本文针对海洋波浪能的低频、复杂且随机等特性,为提升海洋波浪俘能效率,通过引入不倒翁机制,设计了一种不倒翁式电磁俘能器.建立了不倒翁式电磁俘能器的动力学模型,基于谐波平衡法求得了不倒翁的摆角及电压的频率响应,探明了激励对系统动力学行为的影响规律.研制了不倒翁式电磁俘能器原理样机,搭建了试验平台,验证了理论模型的正确性.
1 不倒翁式电磁俘能器的结构设计
图1 为不倒翁式电磁俘能器的设计示意图,主要由不倒翁结构、线圈、Halbach 磁铁阵列、两块永磁体(PMA,PMB)和封装外壳组成.不倒翁结构底部为一个半圆形金属块,顶部为Halbach 磁铁阵列,两部分通过树脂连接件相连,形成一个整体.不倒翁结构整体质心位于半圆形金属块上.封装外壳包含底座与上盖两部分,采用3D 打印技术一体化成型.其中,底座设计有圆弧轨道面,用于放置不倒翁结构,其余部分采用镂空设计,以降低整体质量.线圈通过销与上盖固定,PMA和PMB分别固定在不倒翁结构摆动方向两侧的底座上.PMA和PMB与Halbach 磁铁阵列相互排斥,以提供非线性磁力,在减少不倒翁摆动过程中与底座之间的碰撞的同时,可提升不倒翁摆角回复速度.Halbach 磁铁阵列由5 块矩形永磁体构成,用于增强单侧磁场强度,在安装时需要将强磁场一侧贴近线圈.俘能器可漂浮于海面,在海浪作用下,位于俘能器内部的不倒翁会发生摆动,使得Halbach 阵列与线圈间产生相对运动,产生感应电压,从而有效俘获低频海洋波浪能量.同时,俘能器底部设计有安装孔,可以安装锚链或绳索,通过锚定的方式将俘能器固定在海面,避免由于风浪的影响导致装置发生倾覆.
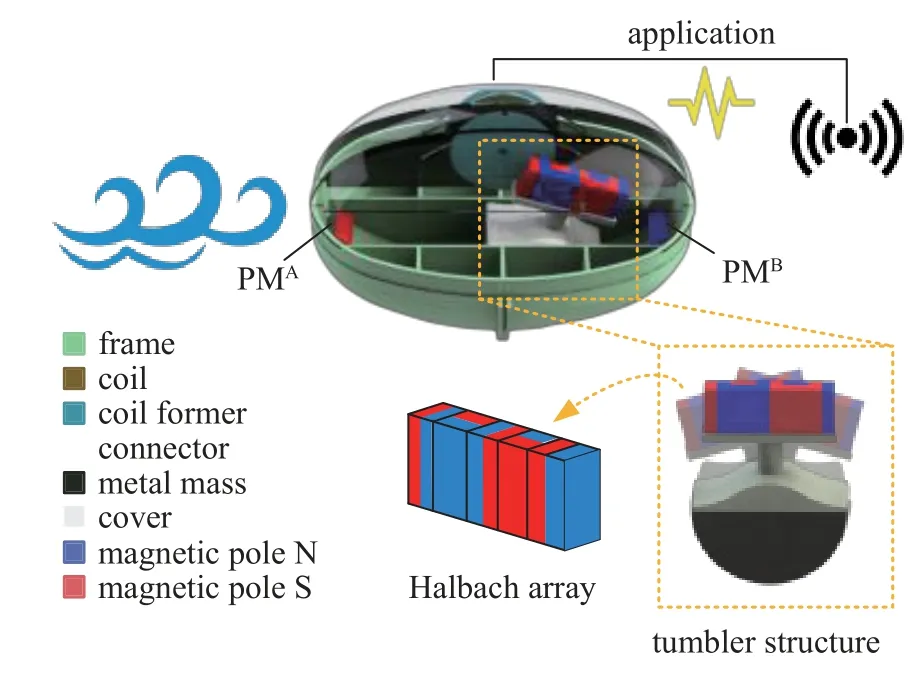
图1 不倒翁式电磁俘能器的设计示意图Fig.1 Schematic diagram of the tumbler-inspired electromagnetic energy harvester
2 理论建模
2.1 非线性磁力模型
为研究俘能器的动力学行为,需要确定不倒翁摆动过程中的非线性磁力及受力情况,Halbach 磁铁阵列与PMA和PMB间的几何关系见图2.
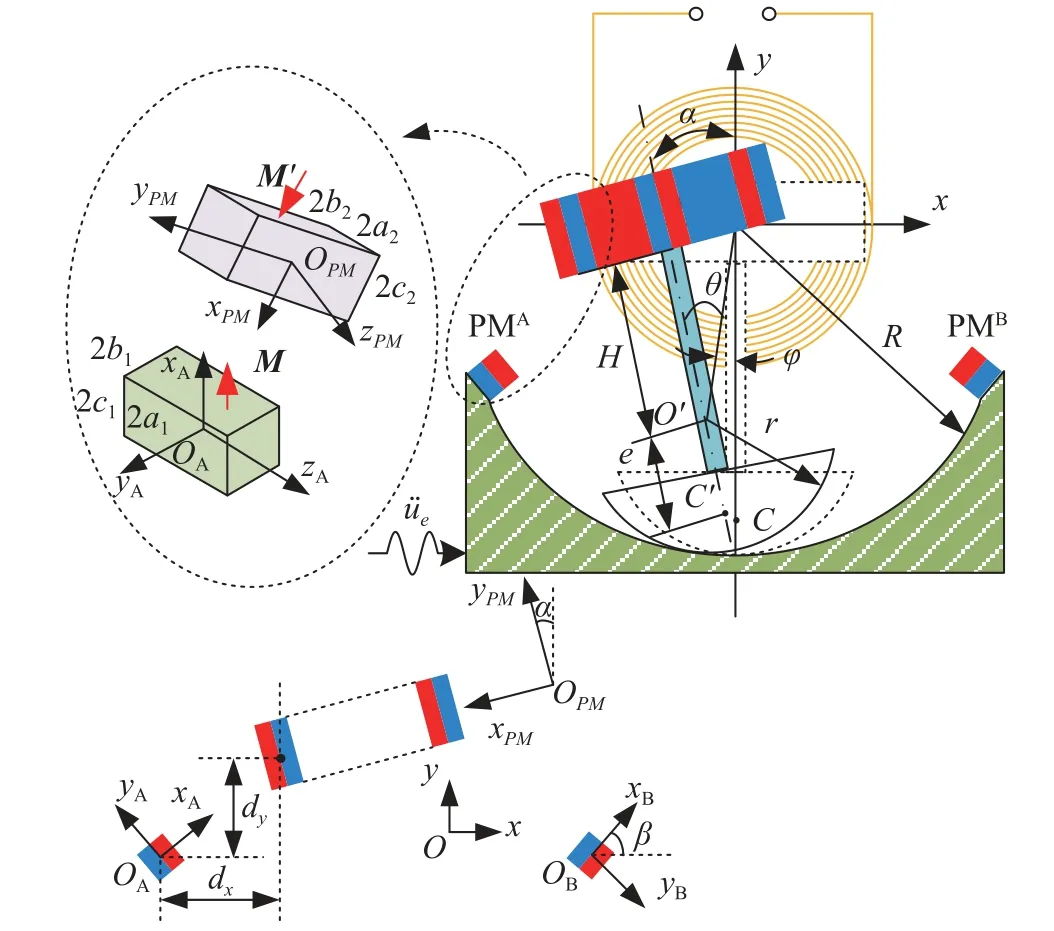
图2 不倒翁式电磁俘能器的理论模型Fig.2 Theoretical model of the tumbler-inspired electromagnetic energy harvester
根据文献[30],PMA与Halbach 磁铁阵列最左侧磁铁之间的磁力表示为
式中,Br1与Br2为剩磁强度,µ0为真空磁导率.
根据几何关系可得
同理可得PMB与Halbach 磁铁阵列最右侧磁铁之间的磁力,可用多项式进行拟合,如下
式中,k1,k2,k3为等效非线性磁力的刚度系数,如表1所示.

表1 非线性磁力的刚度系数Table 1 Stiffness coefficients of nonlinear magnetic force
2.2 控制方程
图2 为不倒翁式电磁俘能器的理论模型.假设不倒翁在圆弧面上为纯滚动,即 φR=rθ.不倒翁的摆角为 α,根据几何关系可得,其中,k=R/r为底座圆弧底面与不倒翁底部金属块之间的半径比.系统的动能可写为
式中,m为不倒翁结构的质量,r为不倒翁底部半圆形金属块半径,R为底座圆弧轨道面半径,e为不倒翁结构的偏心距,Jc为不倒翁结构的转动惯量.系统的重力势能可以表示为
式中,g=9.8 m/s2.根据拉格朗日方程和基尔霍夫定律可得不倒翁式电磁俘能器的控制方程为
式中,c为阻尼系数,Cm与Ce为机电耦合系数[31],等效质量Me与非线性项f1(α),f2(α),f3(α)可表示为
为了简化计算,将f1(α),f2(α),f3(α)用泰勒级数展开,式(11)可表示为
2.3 俘能器的幅频响应关系
式(12)和式(15)为非线性耦合系统,本文采用谐波平衡法推导了系统的频域响应关系.当俘能器进入到稳态响应时的稳态解可写为
式中,x,y,p,q为关于时间t缓慢变化的系数.将式(21)和式(22)代入式(12)中,则 sin(ωt)和 cos(ωt)的常数项分别为
由于系统进入稳态响应时,随时间变化的系数可以忽略.因此,式(23)和式(24)等于0,由此可以用x,y表示p,q,即
对式(26)进行化简,并忽略如 cos(5ωt),sin(5ωt),cos(3ωt)和 sin(3ωt)等高次谐波项,则 cos(ωt),sin(ωt)的系数分别为
将 cos(ωt)和 sin(ωt)的系数平方相加可得
2.4 数值解
为了验证该解析解的正确性,本节基于机电耦合方程式(11)和式(12)进行了数值分析,以验证幅频响应关系的正确性,相应的参数见表2.
表2 俘能器的几何和材料参数Table 2 Geometric and material properties of the harvester
图3 为不倒翁摆角和感应电压的解析解和数值解对比图,其中,激励幅值A=0.4g.可以看出,不倒翁摆角和相应的感应电压的解析解和数值解吻合较好,这也证明了理论建模的有效性与正确性.摆角和感应电压在低频区出现硬化特性,这表明系统在非线性磁力的影响下呈现较强的非线性特征.同时,俘能器在0~3 Hz 的范围内可获得较高的输出电压,表明系统具有较好的低频适应能力.

图3 不倒翁式电磁俘能器摆角与感应电压解析解与数值解对比Fig.3 Comparison between theoretical solution and numerical solution of the swing angle and the voltage of the tumbler-inspired electromagnetic energy harvester
3 非线性动力学行为
上一节研究发现系统在低频区存在明显的硬化现象,为此,本节着重分析激励频率和幅值对俘能器动力学行为的影响规律.
3.1 激励频率对俘能器动力学行为的影响规律
本小节中激励幅值为A=0.3g.图4 为俘能器摆角与电压随激励频率的分岔图.可以看出: 当激励频率在1~2 Hz 范围时,俘能器可能呈现周期运动或准周期运动;在2.1~3 Hz 范围时,俘能器可能呈现混沌运动;随着激励频率的进一步增大,俘能器完全进入周期性运动.由于电压与不倒翁摆角之间存在机电耦合关系,因此,电压变化趋势与摆角大致相同,在同一频率下电压与摆角的动力学行为相似.

图4 摆角响应和电压随激励频率的分岔图Fig.4 Bifurcation diagram of the swing angle and voltage with respect to the excitation frequency
为进一步分析俘能器在不同激励频率下的动力学行为,选取了3 组不同激励频率(f=2.5,4,10 Hz)进行分析.同时为了更好地表征俘能器的能量采集性能,便于理解不同激励条件下俘能器的动力学行为,在后续分析中,时域响应与傅里叶频谱采用电压响应,而相轨迹与庞加莱截面采用电流与电荷之间关系.图5 为激励频率f=2.5 Hz 时俘能器摆角和电压响应、相轨迹与庞加莱截面和傅里叶频谱图.此时,俘能器的摆角与电压曲线呈现出明显的混沌运动特征,最大电压达到2 V,相应的相轨迹与庞加莱截面出现了奇异的吸引子,表明此时系统进入了混沌运动.从频谱图中可以看出,摆角和电压响应除了2.5 Hz 的基频响应外,还有3 倍次超谐波响应以及1~5 Hz 范围内连续且幅值较低的频带,也证明俘能器在此激励频率下呈现混沌运动.
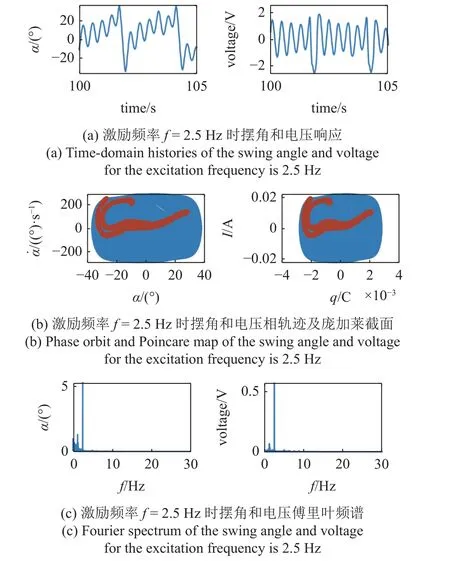
图5 激励频率在2.5 Hz 时俘能器的摆角和电压响应、相轨迹与庞加莱截面和傅里叶频谱Fig.5 Time-domain histories,phase orbit,Poincare map and Fourier spectrum of the swing angle and voltage for the excitation frequency is 2.5 Hz
随后增大激励频率至f=4 Hz,俘能器摆角和电压的响应、相轨迹与庞加莱截面和傅里叶频谱图如图6 所示.此时,俘能器摆角与电压响应曲线都呈现出明显的周期性.同时,与f=2.5 Hz 时相比,俘能器摆角与电压迅速减小,在此激励频率下最大摆角为5°,最大电压为0.5 V.傅里叶频谱图显示,无论是摆角还是电压响应,都只存在一个4 Hz 的基频响应.此外,俘能器摆角与电压的相轨迹与庞加莱截面也证明系统此时已经进入周期运动状态.

图6 激励频率在4 Hz 时俘能器摆角和电压响应、相轨迹与庞加莱截面和傅里叶频谱Fig.6 Time-domain histories,phase orbit,Poincare map and Fourier spectrum of the swing angle and voltage for the excitation frequency is 4 Hz
激励频率继续增大至f=10 Hz 时,俘能器摆角与电压的响应、相轨迹与庞加莱截面、傅里叶频谱图如图7 所示.此时,俘能器的运动仍为周期运动.俘能器的摆角和电压相应频谱图中仅有10 Hz 基频响应一个峰.此外,俘能器的摆角与电压响应曲线和相轨迹均表明此时系统为规律的周期运动.由此可得,俘能器在不同的激励频率下呈现复杂的动力学行为.在低频区域内,位于俘能器的不倒翁结构的共振现象使其更容易发生大幅混沌运动,此时俘能器更容易进入混沌运动,同时也可以获得较高的俘能性能.
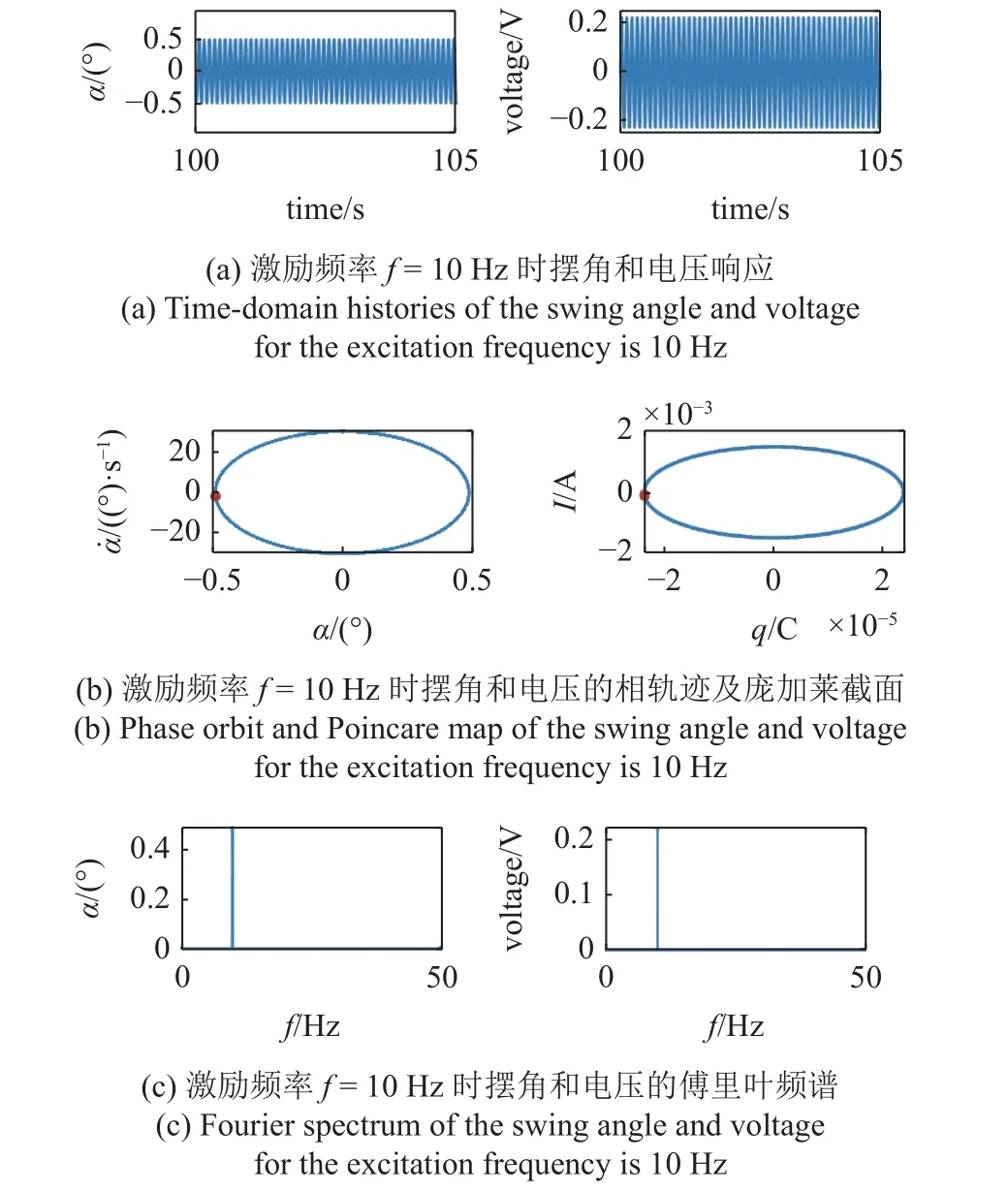
图7 激励频率在10 Hz 时俘能器摆角和电压响应、相轨迹与庞加莱截面和傅里叶频谱Fig.7 Time-domain histories,phase orbit,Poincare map and Fourier spectrum of the swing angle and voltage for the excitation frequency is 10 Hz
3.2 激励幅值对俘能器动力学行为的影响规律
本节分析了激励幅值对俘能器动力学行为的影响规律,其中,激励频率为f=2.5 Hz.图8 为俘能器的摆角与电压响应随激励幅值的分岔图.可以看出,随着激励幅值的增大,摆角和电压都随之增大,由于永磁体(PMA,PMB)与Halbach 磁铁阵列形成的磁斥力对不倒翁摆角的限制,最大摆角被限制在50°.与此同时,在不同激励幅值条件下,俘能器呈现复杂的动力学行为.与图4 相比,随着激励幅值的变化,俘能器出现混沌的区域更大,即当激励幅值在0.22g~0.35g或0.6g~1g时,俘能器可能出现混沌运动.而在其他范围时,俘能器可能处于周期运动或准周期运动.
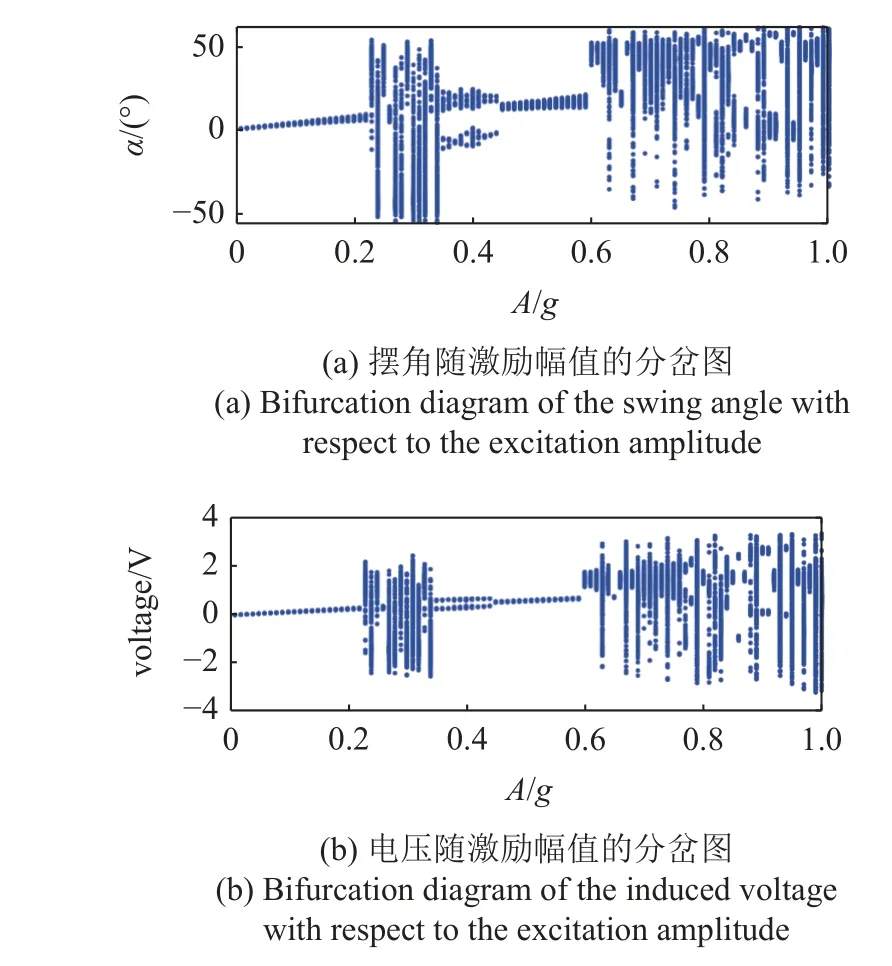
图8 摆角响应和电压随激励幅值的分岔图Fig.8 Bifurcation diagrams of the swing angle and voltage with respect to the excitation amplitude
为了分析俘能器在不同激励幅值下的动力学行为,讨论了俘能器在3 组不同激励幅值条件下(A=0.35g,0.5g,0.8g)的动力学行为,如图9~图11 所示.图9 为A=0.35g时俘能器的摆角和电压响应、相轨迹与庞加莱截面和傅里叶频谱图.此时,俘能器摆角和电压呈现明显的混沌运动特征.从频谱图中可以看出,俘能器摆角与电压除了2.5 Hz 的基频响应外,还存在3 倍次超谐波响应以及连续的幅值较低的频带.此外,相应摆角与电压的相轨迹和庞加莱截面中出现了奇异的吸引子,表明俘能器在此激励幅值条件下为混沌运动.当激励幅值增加到0.5g时,俘能器的摆角和电压响应、相轨迹与庞加莱截面和傅里叶频谱图如图10 所示.此时,俘能器的摆角与电压响应呈现出明显的周期性特征,俘能器摆角与电压的频谱图仅有2.5 Hz 的基频响应.此外,相轨迹和庞加莱截面均表明系统此时已重新回到周期运动状态.而当幅值进一步增加时至A=0.8g时,俘能器的摆角和电压响应、相轨迹与庞加莱截面、傅里叶频谱图如图11 所示.摆角与电压的响应曲线再次变得杂乱,频谱图中出现了连续的无规律的幅值较低的频带,相应的相轨迹与庞加莱截面中再次出现了奇异的吸引子,这表明系统再次进入了混沌运动.总之,在低频范围内俘能器不是一定会呈现混动运动,随着激励幅值的增大,系统会发生周期运动与混沌运动交替出现的情况.由于系统发生混沌运动时具有较大的摆角,产生的感应电压也较大,因此系统在混沌运动时俘能效果较好.
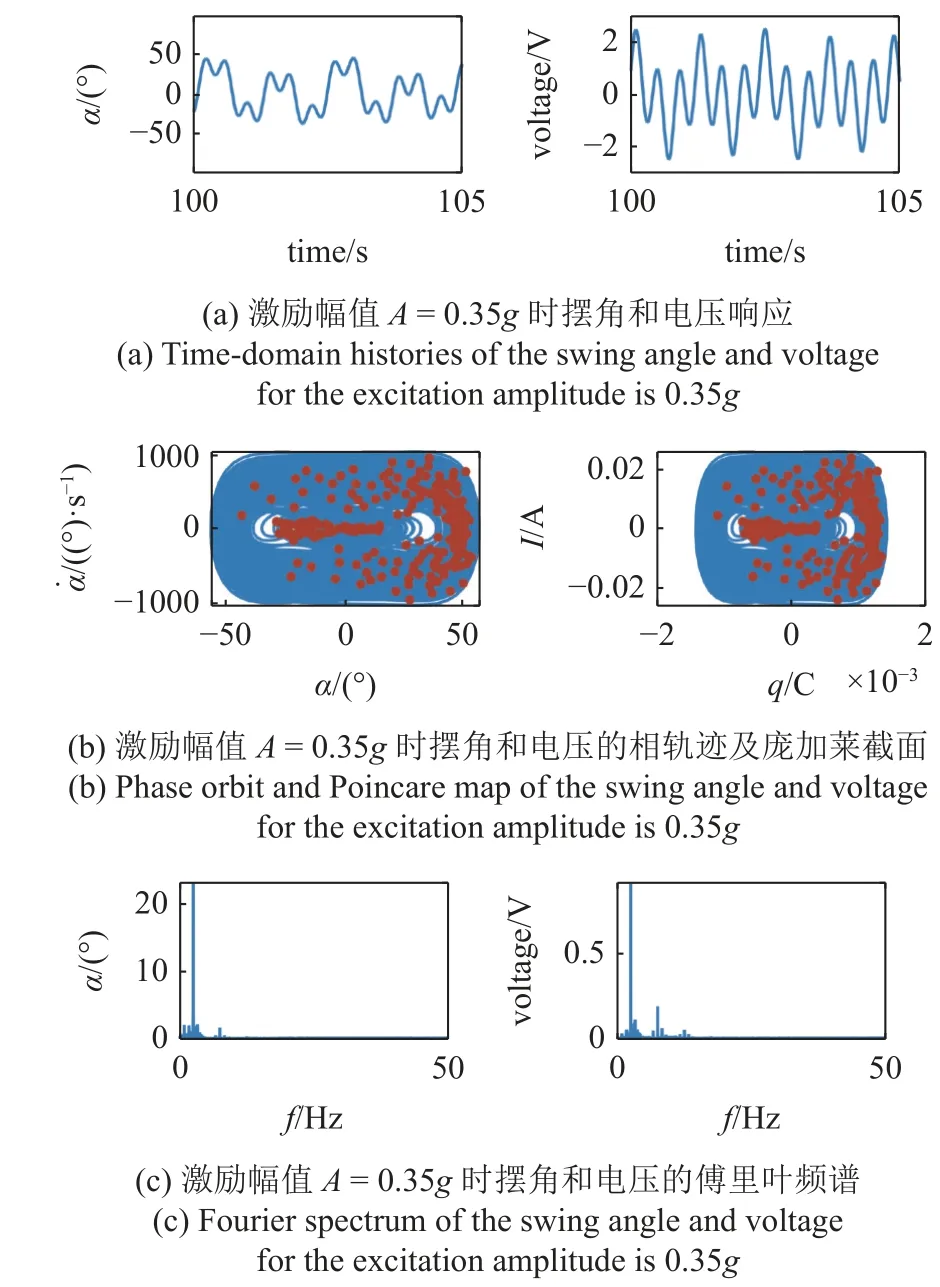
图9 激励幅值在A=0.35g 时俘能器的摆角和电压响应、相轨迹与庞加莱截面和傅里叶频谱Fig.9 Time-domain histories,phase orbit,Poincare map and Fourier spectrum of the swing angle and voltage for the excitation amplitude is 0.35g
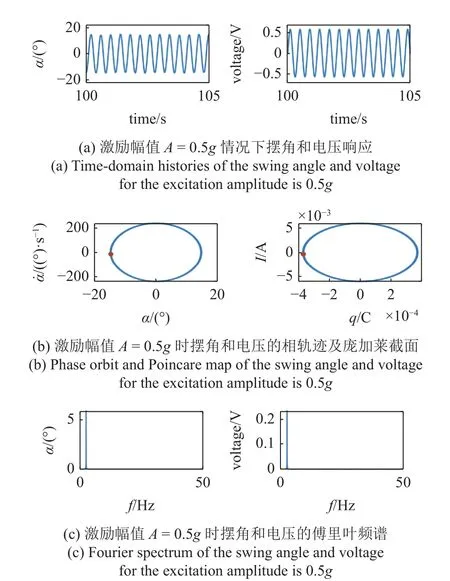
图10 激励幅值在A=0.5g 时俘能器的摆角和电压响应、相轨迹与庞加莱截面和傅里叶频谱Fig.10 Time-domain histories,phase orbit,Poincare map and Fourier spectrum of the swing angle and voltage for the excitation amplitude is 0.5g
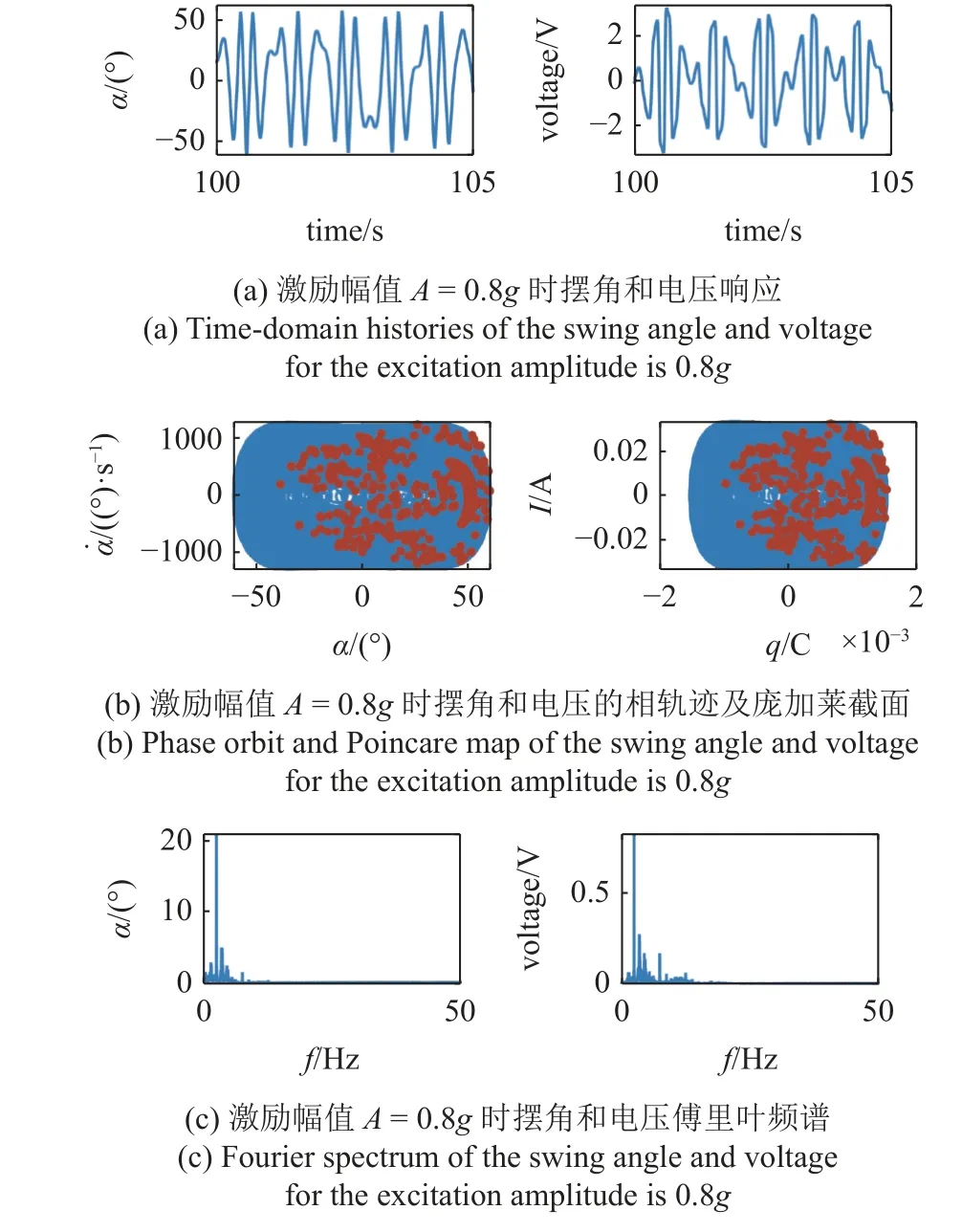
图11 激励幅值在A=0.8g 时俘能器摆角和电压响应、相轨迹与庞加莱截面、傅里叶频谱Fig.11 Time-domain histories,phase orbit,Poincare map and Fourier spectrum of the swing angle and voltage for the excitation amplitude is 0.8g
4 试验验证
为了验证不倒翁式电磁俘能器动力学行为理论分析的正确性,根据表2 所示结构参数制作样机,并搭建实验平台进行试验验证.如图12 所示,试验平台主要由计算机、振动控制器、功率放大器、振动台、示波器和不倒翁式电磁俘能器组成.试验时通过计算机设置激励条件,由振动控制器发出激励信号,经过功率放大器输出至振动台,振动台按照预设的激励信号运行,使用示波器实时测量并记录俘能器输出电压信号.
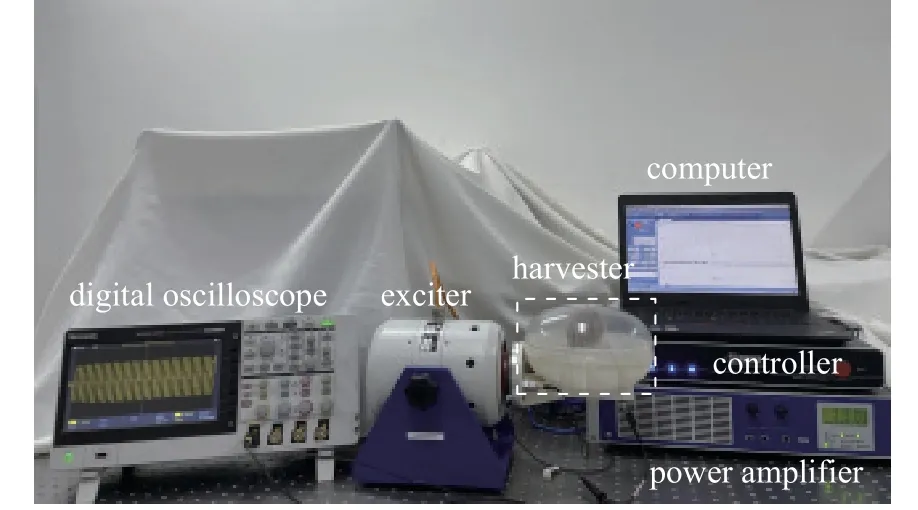
图12 试验平台照片Fig.12 Photograph of the experimental platform
图13 为俘能器在0.5~3 Hz 低频范围内的平均输出功率.俘能器的平均功率随着频率的升高先增大后降低,在2.5 Hz 时俘能器的电学输出效果最佳,此时平均功率达到70 mW,表明该俘能器在低频激励条件下具有良好的能量采集性能.

图13 俘能器的平均功率Fig.13 Average power of the harvester
图14 为激励幅值A=0.3g,激励频率分别为f=2.5,4,10 Hz 时的不倒翁式电磁俘能器的电压响应与傅里叶频谱图的实验结果.如图14(a)所示,当f=2.5 Hz 时,俘能器的电压波形杂乱无章.频谱图中可以看到电压响应除了2.5 Hz 的基频响应外,还存在连续的幅值较低的频带,与图5 中的仿真结果基本一致.此时,俘能器进入了混沌运动状态.随后增大频率至f=4 Hz 俘能器的电压响应与傅里叶频谱图如图14(b)所示.相较于f=2.5 Hz 时俘能器的电压峰值有所降低,电压波形重新具有明显的周期运动.此外,从频谱图中可以看到除了4 Hz 的基频响应外,还出现了2 倍(8 Hz)和3 倍(12 Hz)的超谐波响应,这与仿真结果基本一致.图14(c)为激励频率f=10 Hz 时俘能器的电压响应与傅里叶频谱图.此时,相较于前两种激励频率,俘能器的电压峰值继续减小,系统周期性增强,从傅里叶频谱图中可以看到仅有10 Hz 的基频响应,表明系统处于周期运动.在高频区域特别是系统处于周期运动时,实验结果与仿真结果较为一致,但在低频区域,由于系统处于混沌运动,实验与仿真结果之间存在一定误差,但总体上看实验与仿真结果基本吻合.
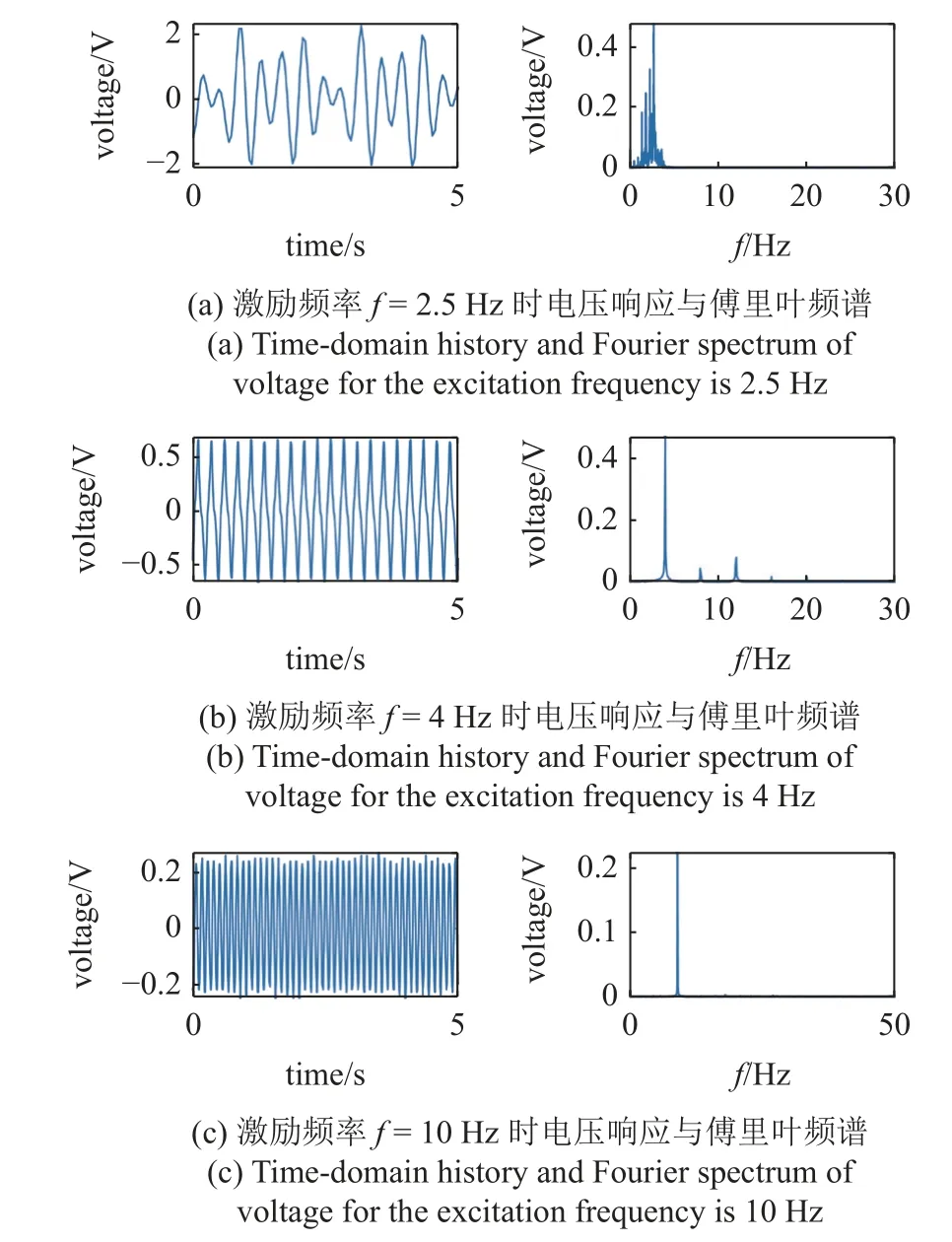
图14 不同激励频率时实验电压响应与傅里叶频谱Fig.14 Experimental time-domain history and Fourier spectrum of voltage under different excitation frequencies
5 结论
本文提出了一种不倒翁式电磁俘能器,基于拉格朗日方程建立了其控制方程,利用谐波平衡法推导了不倒翁摆角与俘获电压的频率响应关系.研究了激励幅值和频率对系统动力学行为的影响规律.结果表明,在不同激励条件下,不倒翁式电磁俘能器具有复杂的非线性动力学行为.通过实验验证了理论的正确性,为不倒翁机制在低频海洋波浪俘能上的应用提供了新思路.主要结论如下:
(1)非线性磁力的引入,使得系统呈现刚度硬化特性,提升了俘能器的低频俘能性能;
(2)随着激励频率的增大,系统由混沌运动变为准周期运动及周期运动,低频条件下系统更容易发生混沌运动,并且俘能效果较好;
(3)随着激励幅值的增大,系统会发生周期运动与混沌运动之间的转换.总体上看,大激励更容易造成俘能器系统的混沌运动,以提升俘能效果.
