机械能量采集动力学调控方法1)
2023-11-16赵林川陈泽文邹鸿翔张文明
赵林川 陈泽文†, 邹鸿翔†,,2) 孟 光 张文明,3)
* (上海交通大学机械系统与振动全国重点实验室,上海 200240)
† (湖南工程学院机械工程学院,湖南湘潭 411104)
** (长沙理工大学汽车与机械工程学院,长沙 410114)
引言
物联网技术的飞速发展,有望实现人与人、人与物、物与物之间的连接互通,为创建智能化世界奠定基础[1-2].传感器作为物联网的“神经末梢”,是感知外界的基础元件,如何对广泛分布的传感器长期有效供能是传感器网络发展的瓶颈问题之一.目前,大多数传感器依靠化学电池供电,化学电池会产生环境污染且使用寿命有限.并且,传感器数量庞大、分布范围广,更换电池困难,有些传感器布置在特殊环境难以维护.另一方面,随着新型材料、微纳制造和集成电路等技术的迅速发展,微电子器件的能耗显著降低.因此,能量采集技术应运而生,即采集自然界中广泛存在的分布式、无序式、低品质的高熵能源并转换为电能,为广泛分布的低功耗传感器供能,是有效解决物联网供能问题的有效途径之一[3-6].
机械能量是环境中最普遍存在的能量之一,如风、波浪、高精尖设备运行、车辆行驶、人体运动和机械振动等等.然而,环境中的机械能具有分布范围广,激励形式复杂,激励方向多变,激励频率低、频域宽等特点.机械能量采集系统难以直接俘获环境激励,且机电能量转换效率低,输出功率小,无法满足合理、高效、持续、稳定地提供电能的实际应用需求[7-8].因此,需要对机械能量采集系统进行合理的动力学设计和调控,使其与特定的环境激励相匹配,提升机械能量采集系统动力学性能,进而俘获更多的机械能并提高机电转换效率和输出电学性能.
针对物联网技术的可持续能源供应需求,近年来机械能量采集技术蓬勃发展,成为了国际热点研究方向.众多研究表明非线性系统、频率提升、机械整流和磁力耦合等方法与技术能够提升系统的综合性能[9-13].但这些研究各自孤立,从方法论层面对这些方法与技术进行归纳总结的论文较少.为此,本文从动力学调控的角度解析了现有机械能量采集性能提升方法和技术[14-17],如图1 所示,构建了包括激励调制、非线性系统、多自由度系统、自适应控制和策略调控等方法的动力学调控方法体系,论述了动力学调控方法的典型设计,展望了动力学调控方法的发展趋势与未来前景.
1 激励调制
环境中机械能的激励形式复杂多变,难以直接进行机电能量转换.例如: 人体运动和设备微振动的激励是微弱的,机电换能器难以有效工作;波浪和人体运动是超低频的、不规则的,航空发动机转子转动是超高频的,难以与机电换能器的谐振频率匹配;碰撞、冲击激励过强会破坏机电换能器;恶劣自然环境、复杂工业环境会降低机电换能器的可靠性和机电转换效率.因此,需要根据不同的能量来源进行激励调制,再将合理的激励输入到机电换能器进行机电转换.通过调制后的外激励具有规律、灵活可控的特点,使得机电换能器更容易采集低品质高熵能源,提高机电能量转换效率.激励调制方法是能量源与机电换能器之间的关键纽带,主要分为3 类: 激励形式转换、激励频率提升和激励力放大.
1.1 激励形式转换
风和水流等流体能量难以直接激励机电换能器,通常需要将流体的流动转换为振动、旋转运动或滚动运动,再激励机电换能器进而产生电能.流体运动转换为机械运动的典型动力学调控能量采集系统如图2 所示.旋转式流体能采集系统通过叶片等机械结构,将风能和水流能等流速、方向、大小不稳定的激励转换为旋转运动,再基于机电换能器而发电[18-20].如图2(a)所示,水流先驱动水轮机产生旋转激励,再带动多层栅盘结构摩擦纳米发电机(triboelectric nanogenerator,TENG)进行旋转能量采集.多层栅盘结构的TENG 采用D 形轴与水轮机连接,可以使多层盘同步相对旋转,实现结构集成和倍增输出[21].流体能量也可以先调制成旋转运动再转换为压电梁振动而产生电能[22-23].此外,基于空气动力学的流致振动能量采集系统可以将流体能量转换为振动而发电,主要分为颤振、涡激振动、驰振和尾流驰振等形式.如图2(b)所示,Wang 等[24]提出了一种涡激振动与驰振相互转换的压电风能采集器,阻流体上附加Y 形结构可以基于驰振模式进行风能采集,而将Y 形结构去除时可以基于涡激振动进行能量转换.如图2(c)所示,Wang 等[25]报道了一种基于颤振实现两种摩擦电材料之间的周期性接触和分离的TENG,该装置体积小,最大输出功率密度为9 kW/m3,能够采集人体呼吸能量.此外,流体能量也可以同时转换为多种形式的机械运动,利用不同激励特征灵活地设计合适的机电换能器而满足多种应用需求[26].在图2(d)中,Ye 等[27]设计了一个摩擦-电磁复合式风能采集系统,能够将风能同时转换为振动与旋转运动,分别利用TENG 在中低风速激励下高性能和EMH 在高风速下高性能的特点,实现了宽转速范围的风能采集与自供能风速传感.
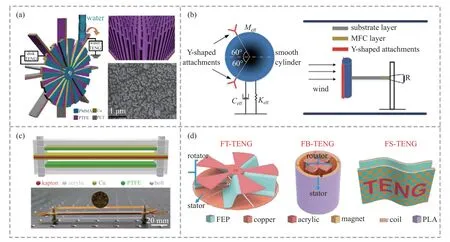
图2 流体运动转换为机械运动的典型动力学调控能量采集系统: (a)水流能转换为旋转运动[20],(b)风能转换为振动(驰振)[24],(c)风能转换为振动(颤振)[25],(d)风能转换为旋转和振动[27]Fig.2 Typical dynamic regulation energy harvesting systems for converting fluid motion into mechanical motion: (a)convert water flow energy into rotary motion[20],(b)convert wind energy into vibration (galloping)[24],(c)convert wind energy into vibration (flutter)[25],(d)convert wind energy into rotation and vibration[27]
环境中大多数激励是不可控的,如果直接作用到换能器上,难以与机电换能器匹配,严重时,不可控的激励会损坏换能器.因此,需要将环境中不可控的运动形式转换为可控的作用力,再传递到机电换能器上,使激励与换能器的匹配灵活可控.压电悬臂梁是最常见的一种压电式能量采集系统,但是陶瓷压电材料在压力下易损坏,因此可以将压电悬臂梁的振动转换为可控的作用力,再传递到压电陶瓷上,有利于机电转换的可控性,也能提升系统的可靠性.如图3(a)为一种杠铃式压电堆叠振动能量采集系统,将多层环形压电陶瓷套在一根弹性钢轴上,再通过法兰盘和环形螺母将压电堆预压缩[28].这种结构可以将振动转换为作用在压电堆上的拉力或压力,避免了压电材料损坏失效问题.图3(b)展示了一种能够收集车路冲击载荷的压电能量采集系统,装置的两端耦合两个两端固支的非线性弹性梁,中间放置多层PZT 堆叠,车辆行驶产生的动态载荷垂直作用在梁的中部,然后将作用力转换成水平压缩力作用到PZT 堆叠上[29-30].类似地,金属钹形结构不仅可以将装置受到的冲击力转换为垂直作用到压电材料上的可控力,还可以提升压电换能器的机电转换效率[31-32].磁力作为一种非接触能量传递方式可以将环境中不规则、不可控的激励转换为可控的激励,再作用到机电换能器上.如图3(b),这种方式不仅可以使作用在压电材料上的作用力更加可控,也可以使压电材料受力更加均匀,有利于机电能量转换[33].

图3 不可控运动形式转换为可控作用力的典型动力学调控能量采集系统: (a)杠铃式压电堆叠振动能量采集系统[28],(b)抗冲击式压电能量采集系统[30],(c)磁力耦合钹形振动能量采集系统[33]Fig.3 Typical dynamic regulation energy harvesting systems for converting uncontrollable motion forms into controllable forces: (a)barbell-shaped piezoelectric stacking vibration energy harvesting system[28],(b)impact resistant piezoelectric energy harvesting system[30],(c)magnetic coupling cymbal unit vibration energy harvesting system[33]
往复运动也是一种常见的激励形式,如波浪波动、人体脚踏运动和车辆悬架振动等等.这些激励形式具有频率低,不规则,行程大的特点,不利于机电能量转换,并且往复运动在换向时也会造成能量损耗.因此,可以将往复运动转换成转动或滚动,再作用到机电换能器上,既可以使激励更加规律又可以避免换向造成的能量损耗.在机械传动机构中,齿轮齿条、棘轮、飞轮、锥形齿轮和单向轴承的配合使用,能够方便地将往复运动转换为旋转运动.如图4(a)所示,Ali 等[34]采用桶形凸轮机构将汽车悬架中大幅不规则往复运动转换成双向旋转运动,再通过变速器将双向旋转运动转换为单向旋转运动而基于电磁感应发电.在图4(b)中,Cho 等[35-36]对齿轮组进行了合理设计,能够将人体自然行走中的双向运动转换成工作轮的单向高速旋转运动,并且同时提升了激励频率,极大地提升了器件的输出功率,能够为可穿戴设备供能.在图4(c)中,波浪整流器通过两个单向轴承和一个齿轮齿条结构将往复波浪运动转化为发电机的单向旋转运动[37].类似地,Mi 等[38]提出了一种基于半波机械整流方法的悬挂式能量采集背包,将人体脚踏的往复运动转换为单向旋转,基于电磁感应而产生电能,在运动速度为4.8 km/h 时,装置的功率密度为0.4 W/kg.在图4(d)中,不规则的往复运动也可以转换为滚珠的滚动运动,对机电换能器进行单向可控稳定的激励,不仅有助于机械整流,也能够起到减振的效果,提高器件的可靠性[39].

图4 往复运动转换为旋转/滚动运动的典型动力学调控能量采集系统: (a)往复运动转换为双向旋转[34],(b),(c)往复运动转换为单向旋转[36-37],(d)往复运动转换为滚压运动[39]Fig.4 Typical dynamic regulation energy harvesting systems for converting reciprocating motion into rotation/rolling: (a)convert reciprocating motion into bidirectional rotation[34],(b)and (c)convert reciprocating motion into unidirectional rotation[36-37],(d)convert reciprocating motion to rolling-depression motion[39]
为了更好地利用压电悬臂梁的特性,可以将旋转/滚动激励转换为振动,基于压电效应而产生电能.如图5(a)所示,旋转轴线平行于地面的转子系统可以将旋转运动通过悬臂梁末端质量块受到的重力而转换为压电悬臂梁的振动,重力在旋转运动中可视为一个周期性的激励力[40].在重力的基础上引入磁力可以进一步拓宽系统的工作频域和输出功率[41].对于旋转轴线与地面垂直的转子系统,由于没有重力作为周期性的外激励,可以通过磁力、拨动力、冲击力和碰撞力等外激励将旋转运动转换为振动[42-43].在这几种外激励中,可以通过阵列的方式提升激励频率,其中磁力属于非接触力,设计灵活,能够减少阻尼和能量损耗.如图5(b)所示,Fu 等[44]设计了一种水平双稳态旋转能量采集系统,旋转磁体提供周期性外激励,使得静止的悬臂梁产生振动,固定的磁体与悬臂梁末端磁体产生排斥力,从而引入双稳态系统,能够进一步拓宽工作频域.如图5(c)所示,Chen 等[45]设计了一种圆柱状摩擦-电磁复合式能量采集系统,将旋转运动转换为磁棒的滚动运动再激励阵列的TENG 单元振动,基于接触分离模式发电.这种方式不仅方便集成电磁和摩擦两种机电转换机制,还能使TENG 单元的受力更加均匀,提高了系统的可靠性.如图5(d)所示,He 等[46]设计了旋转拨片式压电梁结构,通过动量轮旋转过程中拨片拨动压电梁使其振动而发电,通过合理匹配拨片和压电悬臂梁的位置能够进一步提升输出功率.
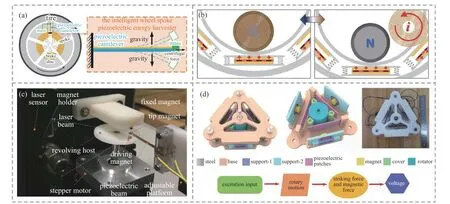
图5 旋转/滚动运动转换为振动的典型动力学调控能量采集系统: (a)利用重力将旋转运动转换为振动[40],(b)利用磁力将旋转运动转换为振动[44],(c)滚动转换为振动[45],(d)利用拨动力将旋转运动转换为振动[46]Fig.5 Typical dynamic regulation energy harvesting systems for converting rotation/rolling into vibration: (a)convert rotation into vibration by gravity[40],(b)convert rotation into vibration by magnetic force[44],(c)convert rolling into vibration[45],(d)convert rotation motion into vibration by plucking force[46]
1.2 激励频率提升
自然环境中大部分能量源的频率都比较低,而大多数机电换能器需要在较高的频率下才能有效工作,并且高频激励可以极大地提升系统的电学输出性能.齿轮组、齿轮齿条等机械结构配合使用可以提升旋转运动的转速(频率),并且机械机构稳定可靠,可以根据应用需求方便地控制激励提升的倍数.如图6(a)所示,Donelan 等[47]开发了一种生物力学能量采集器,类似于汽车中的制动系统,器件帮助人体肌肉做负功,将人走路时脚落地制动过程中消耗的能量采集起来,驱动具有齿轮升频结构电磁发电机发电.Rome 等[48]设计了一种悬浮负载背包,将人体行走过程中承载负载垂直运动产生的机械能转化为电能,通过齿轮与齿条组的组合升频机构将人体激励提升频率,驱动电磁能量采集系统产生电能.利用两种结构相互耦合的作用也可以进行激励频率的提升,即一个低频机构(主系统)和一个高频机构(辅助系统)组成,可以通过自由移动质量、机械拨动、磁力拨动或机械冲击将低频机构被外激励产生的低频振动转换为高频机构的高频振动[49].如图6(b)所示,Pozzi 等[50]设计了一种机械拨动式升频人体运动能量采集系统,人体运动激励拨片拨动压电双晶梁,然后快速释放压电双晶梁,使其能够不受阻碍地振动,实现了激励频率的提升,并且圆周阵列拨片和压电双晶梁可以在人体膝关节运动时连续进行激励.如图6(c)所示,Fan 等[51]提出了一种压电-电磁复合式能量采集系统,利用球形磁体双向碰撞弹簧在线圈内进行电磁发电,同时球的碰撞力激发压电梁的高频振动,实现了升频激励.齿轮齿条之间的摩擦会产生较大的阻尼,机械拨动或碰撞也会产生阻尼,不利于弱激励能量采集,因此可以采用无接触磁力升频机制.磁力齿轮是成熟的机构,可以直接用于激励频率提升,并且也可以进一步优化磁场排布,提升电磁感应的电学输出效果[52].如图6(d)所示,Cai 等[53]提出了磁增频转换器替换传统的齿轮机构,当所有磁铁的极对数等于铁磁块的数量时,磁增频转换器可以有效地提升频率,而不会产生机械摩擦.此外,磁力阵列方式类似于齿轮机构,通过无接触方式进行激励频率的提升[54].栅盘式结构是TENG 中最典型的结构之一,可以提升激励频率,由于旋转栅盘能够不间断地诱导电荷转移,有助于提升系统输出功率,并且加工方便,可以多层叠加,有利于减小空间[55].如图6(e)所示,Bai 等[56]对栅盘式结构进行了表面改性并且串联了多层栅盘,采用摆动质量块驱动栅盘,将低频波浪转化为高频电输出.此外,栅盘式结构也方便集成电磁单元,可以在同一个旋转运动下同时激励摩擦纳米发电机和电磁能量采集系统,同时实现高压电和高电流的电学输出,方便满足不同的应用需求[57].

图6 激励频率提升的典型动力学调控能量采集系统: (a)齿轮组升频机制[47],(b)机械拨动升频机制[50],(c)机械碰撞升频机制[51],(d)磁增频转换器机制[53],(e)栅盘式结构升频机制[56]Fig.6 Typical dynamic regulation energy harvesting systems using excitation frequency-up conversion: (a)gear set frequency-up mechanism[47],(b)mechanical plucking frequency-up mechanism[50],(c)mechanical collision frequency-up mechanism[51],(d)magnetic frequency-up converter mechanism[53],(e)segmentally structured disk frequency-up mechanism[56]
1.3 激励力放大
压电材料需要合适的外力使其产生形变而产生电能,在合理范围内,压电材料的应变越大,其产生的电能越大.因此,需要对激励力进行放大,提高压电能量采集系统的电学输出性能.但是,压电纤维和压电陶瓷在过大的外力激励下会损坏,难以保证器件的可靠性,因此需要进行合理的动力学调控设计,既能放大作用在压电材料上的力,又能够保证其可靠性.弯张放大结构包括两侧对称的弯张型金属层和中心的压电层,外激励力通过弯张型金属层的转换和放大作用,将径向力转换为放大的轴向力,不同方式布置的压电层等效压电系数能够放大数十至上百倍.此外,弯张型金属层也可以使压电材料的受力更加均匀,极大地提升了压电陶瓷的机械耐受度和鲁棒性.
典型的弯张放大结构包括: 钹型结构、桥型结构和多层桥型结构等[58-60].如图7(a)所示,Qian 等[61]将压电堆引入到弯张放大结构中,进一步提升了每个弯张换能器的输出功率.并且将器件阵列集成在鞋跟处,可以采集人体行走时的能量,在行走速度为5.6 km/h 时,能够产生20 mW 的平均功率.进一步,两极放大柔顺结构用于人体运动能量采集,能够进一步优化弯张结构的输出性能[62].如图7(b)所示,Wu 等[63]设计了一种基于弯张结构的两级力放大压电能量采集器,将两级弯张结构与锥形传动机构和滑动导向机构集成,能够在两个垂直方向的激励下均产生力放大效果.

图7 激励力放大的典型动力学调控能量采集系统: (a)压电堆弯张放大结构[61],(b)双向两级放大型弯张结构[63],(c)高效压缩模式压电能量采集器[65],(d)杠杆原理用于激励力放大[73]Fig.7 Typical dynamic regulation energy harvesting systems using excitation force amplification: (a)piezoelectric stack flextensional structure[61],(b)two-directional two-stage amplified flextensional structure[63],(c)high efficiency compression mode energy harvester[65],(d)lever mechanism for excitation force amplification[73]
弯张结构不仅适用于高负载、强激励环境,还可以通过动力学调控设计用于弱激励环境中.如图7(c)所示,Yang 等[64-67]提出了一种高效压缩模式压电能量采集器.器件由一对弹性梁、一对质量块和一个弯张压电单元组成.基础激励被质量块和弯张单元的中心作为惯性力吸收,惯性力被弹性梁放大为沿弹性梁的轴向力,最后轴向力被弯张单元放大,作用在压电材料上产生电能.高效压缩模式压电能量采集器能够采集低频振动、旋转运动的能量,具有广泛的应用价值[68-69].此外,Li 等[70-72]利用桁架、铰链、弹簧等机械结构进一步对弯张结构进行优化设计,提高其电学输出效果.
杠杆结构可以放大位移,也可以对激励力产生放大作用.如图7(d)所示,Hua 等[73]利用杠杆结构放大人踏步时产生的位移,充分利用了人体的重量和踏地时的冲击力,放大了压电材料的形变,在2.3 Hz 的激励下能够产生13.60 mW 的平均功率.Zhang 等[74]设计了一种具有弹性储能和位移放大功能的柔性杠杆结构,在人体步进和回弹过程中,线圈铁芯中的磁感应方向改变两次,从而将冲击负载部分转换为电能.Yang 等[75-76]提出了一种利用杠杆机构的新型双稳态能量采集器,放大了磁体和线圈的相对位移,显著地提升了输出功率.
2 非线性系统
环境中大部分的能量源是分布在很宽的频域上,且低频成分占据主导地位,传统线性能量采集系统只能在谐振频率附近产生较大振幅的振动,实现有效的功率输出,难以实时匹配环境中的宽频振动,制约了机械能量采集系统的发展.非线性能量采集系统具有较宽的谐振频域,拓宽了系统的有效工作频域范围,且系统的动力学特性可以灵活设计、方便调控,能够匹配不同的环境激励,满足多样化的应用需求[77].近年来,非线性能量采集系统被广泛研究,按照动力学调控方法对其进行分类,主要分为3 种类型: 非线性磁力调控、基于内共振原理调控和几何非线性调控.
2.1 非线性磁力调控
磁力是典型的非线性力,合理设计空间磁场的配置可以利用磁力对能量采集系统的动力学特性进行调控,使其具有较宽的有效工作频域.并且,磁力是一种非接触力,磁体的磁力大小也可以通过磁体大小、距离远近和磁体材质等方便地调整,能够更加方便和灵活地进行设计与加工.2009 年,Cottone等[77]和Erturk 等[78]报道了一种带有末端磁体的压电悬臂梁,用于非线性振动能量采集,具有良好的宽频特性.利用非线性磁力可以方便地构造双稳态、多稳态系统,系统能够在不同稳态点之间实现大幅度阱间跳跃,在宽频域范围内实现大振幅振动,有效提高了系统的动力学响应和电学性能[79].研究表明,在单稳态与双稳态之间的临界区域,系统的动力学特性最佳,更容易被激励而产生较大振幅的振动[80-81].
图8(a)展示了一种磁耦合非线性压电能量采集器,改变外部磁体的角度,器件在不同频率范围内表现出双稳态或单稳态特性,能够在4~22 Hz 频率范围内有效工作[82].进一步,Zhou 等[83-84]提出了非线性三稳态系统,与具有更深势阱的双稳态非线性能量采集器相比,带有末端质量的悬臂梁在三稳态系统中更容易通过势能阱,从而在更宽的频域内产生高电能输出.如图8(b)所示,Tang 等[85]利用磁斥力实现非接触式升频调控,避免了机械碰撞和磨损,延长了器件的使用寿命,且系统在1g加速度激励下,能够在10~22 Hz 的宽频率范围内有效工作.在图8(c)中,Wang 等[86]提出了一种紧凑型多稳态复合式人体运动能量采集系统,磁体既可以提供非线性力又作为电磁单元的组成模块,低频振动的位移行程和机械能量传递过程几乎可以完全重叠,从而放大低频宽带振源下的功率输出.在旋转运动中非线性磁力可以与离心力耦合,进一步对系统动力学特性进行调控,提高能量采集系统的输出功率[6].Zhang 等[87]提出了一种双稳态旋转压电能量采集系统,非线性磁力使得系统呈现双稳态,由于旋转过程中的离心效应,双稳态可以转化为单稳态,双稳态系统的高能轨道振荡能够提供足够的动能使系统在单稳态保持稳定的振动,进一步拓宽系统运行频率范围.如图8(d)所示,Mei 等[88]提出了一种四稳态压电能量采集器用于超转速下旋转运动,系统结合低势垒和时变势阱的优点能够在转速为60~420 r/min 的范围内有效工作.

图8 基于非线性磁力调控的典型动力学调控能量采集系统: (a)双稳态系统[82],(b)非线性磁力升频系统[85],(c)复合型多稳态振动能量采集系统[86],(d)旋转多稳态系统[88]Fig.8 Typical dynamic regulation energy harvesting systems using nonlinear magnetic regulation: (a)bistable system[82],(b)nonlinear magnetic frequency-up system[85],(c)hybrid multistable vibration energy harvesting system[86],(d)multistable rotating energy harvesting system[88]
2.2 基于内共振原理调控
内共振是指系统中不同自由度之间的相互作用导致某些特定频率下的放大效应.在非线性内共振系统中,相互作用的自由度之间由于非线性关系而产生耦合效应,使得系统在某些频率上具有突出的能量响应.非线性内共振系统是多自由度系统的一种特殊情况,但其独特之处在于非线性关系导致的内共振现象,因此将非线性内共振系统在本章论述.内共振能够调控系统动力学特性,提升振动能量采集的效果.Chen 等[89-91]首次提出了基于内共振原理的振动能量采集系统,如图9(a)所示,两个非线性模态相互耦合并进行能量交换,相互激励均能产生主共振峰,可以提高振动能量采集系统的有效工作频宽.在宽频激励下基于内共振原理的系统性能优于具有相同固有频率和相同尺寸的线性能量采集系统.Aravindan 等[92]分析了1:3 内共振压电悬臂梁在简谐激励下的非线性动力学和能量采集性能,发现了能量在模态之间的转移只发生在激励的某个阈值内,而该阈值反过来又会影响俘获能量的大小.如图9(b)所示,Xie 等[93]设计了一种T 型压电能量采集器,当激励频率接近系统的第一共振频率时,会出现1:3 的内共振现象,通过低频激励下的高频响应,可以显著提高能量转换效率.同时,系统在第一阶共振带宽内非线性响应增强,工作带宽变宽.Xu 等[94-95]将单线摆连接于压电悬臂梁自由端,利用三维空间中摆锤运动与梁的弯曲模态之间的非线性耦合产生1:2 的内共振,从而实现单悬臂梁的多方向能量收集.在此基础上,Bao 等[96]提出了一种压电悬臂梁-非线性磁摆结构用于采集多方向振动能量,引入了非线性磁力调控悬臂摆系统的内部共振,如图9(c)所示.系统在x方向的内共振带宽是传统压电悬臂摆系统的3 倍,在7.5 Hz 激励下的最大功率为0.64 mW.同时,系统在z方向还实现了额外的谐振频域(3.4~4.3 Hz),以改善z方向能量采集性能.

图9 基于内共振原理的典型动力学调控能量采集系统Fig.9 Typical dynamic regulation energy harvesting systems using internal resonance principle
2.3 非线性几何结构调控
非线性几何结构可以方便地使能量采集系统产生非线性特征,且不需要引入额外的机构,装置更加小型化,有利于集成设计.最常见的非线性几何结构是通过多个弹簧结构的设计形成双稳态或多稳态系统,装置在稳态点之间的大幅度跳动有助于提升能量采集系统的功率输出[97-98].此外,还可以通过非线性刚度的参数设计将系统优化为准零刚度系统,在双稳态和单稳态的过渡区域更容易被激励,有利于在低频环境中收集到更多的能量[99](图10(a)),也可以用于减振-能采一体化设计[100-101].如图10(b),Li 等[102]设计了X 型结构,将双稳态和准零刚度结合,适用于低频弱激励的波浪能采集.此外,还可以通过设计不同的结构来调整几何非线性刚度,从而对系统的动力学特性进行调控,如U 型梁[103],H 型梁[104]等.如图10(c),Paul 等[105]采用FR4 材料设计成的锥形弹簧结构进行振动能量采集,锥形弹簧的非典型应力分布引起的非线性恢复力有助于拓宽系统的有效工作频宽,并且可以通过调整结构的锥度更加方便地调控系统的非线性特征.在图10(d)中,Dhote 等[106-107]设计了一种多稳态正交平面柔顺机构用于非线性振动能量采集系统,将几何非线性与磁力非线性进行耦合,共同调控系统的非线性刚度,提高了系统的输出电压和工作带宽,减小了不同振动模态之间的间隙,使振动模态更加接近.屈曲梁是一种常见的几何非线性结构,可以设计成天然的几何双稳态结构,不需要额外的机械结构,能够在外激励下在两个稳态点之间跳动,有利于提高能量采集系统的电学输出[108].如图10(e),Jung 等[109]提出了一种非线性振动能量采集系统,由两个预弯曲的细长型屈曲梁和桥中心的压电悬臂梁组成,当系统受到高于临界加速度值的低频振动时,屈曲梁在两个平衡点之间快速大幅度跳动,为桥中心的压电悬臂梁提供高加速度,从而使其在高频下共振.此外,屈曲结构也可以进一步拓展为折纸结构、超材料等等,利用其独特的双稳态突跳特性进行能量采集-振动控制一体化设计[110].利用弹性止动模块调整悬臂梁的振动位移也可以使系统具有非线性特征.如图10(f),Machado 等[111]提出了一种低频旋转压电能量收集器,利用弹簧作为柔性止动件限制梁的振动位移,且接触力在最低旋转频率时最大,有助于低转速时的能量采集.Fang 等[112]在柔性止动梁上黏贴压电材料,利用离心软化效应,可以放大驱动梁和止动梁之间的相对运动,增加冲击力,从而显著提高输出功率.
3 多自由度系统
多自由度系统可通过单自由度系统的阵列形成,能够成倍地提升系统的输出功率,但是同时也增加了系统的复杂性,需要提升加工方法才能更好地发挥系统的优势.此外,也可以设计具有耦合作用的多自由度系统,能够单向或双向提升系统的动力学特性,有助于最终提升能量采集输出性能.按照动力学调控方法对其进行分类,主要分为两种类型: 阵列结构和耦合系统.
3.1 阵列结构
阵列结构能够方便地形成多自由度系统,在同一激励下完成多个子单元的能量采集,将能量存储在电容器中,有助于提升系统的电学输出性能.自然环境中风向是多变的,Zhang 等[113]设计了一种多自由度风能采集系统,如图11(a),在圆周阵列6 个柔性TENG 单元,在任意方向的风激励下产生振动,从而驱动柔性单元下部的接触分离单元进行工作,并且由于对称性设计,器件可以直接作为风向传感器.压电悬臂梁作为典型的能量采集单元,可以方便进行圆周或线性阵列,形成多自由度系统,能够有效拓宽工作频域.如图11(b),Deng 等[114]设计了一种多稳态振动能量采集系统,依靠阵列多个带有末端磁体的悬臂梁之间的动力学协同运动而形成多稳态系统,无需外部静磁体,更加利于集成为立方体用于波浪、桥梁振动等能量采集.如图11(c),Fang 等[115]将阵列结构从二维平面拓展到三维空间,设计了一种仿音乐盒结构的旋转拨动式压电能量采集系统.在三维空间阵列的旋转拨动结构可以减少振动干扰,在高旋转速度下收集更多能量,并且具有较宽的有效工作频率范围.Lai 等[116]将三稳态结构与三稳态结构交叉阵列组成一个具有多稳态特性的多自由度系统,能够在 <3 m/s2的弱激励下工作,克服了传统多稳态系统在弱激励下不易越过势能阱的缺点,可以在弱激励下产生更宽的工作带宽.

图11 基于阵列结构多自由度系统的典型动力学调控能量采集系统Fig.11 Typical dynamic regulation energy harvesting systems based on array structure multi-DOF system
3.2 耦合系统
二自由度摆是最常见的具有耦合作用的多稳态系统,研究者们基于二自由度摆的衍生机构设计了各种各样的能量采集系统,经过动力学调控设计有助于提升系统的电学输出性能[117].如图12(a),Iqbal等[118]提出了一个2-DOF 风能与振动能量复合采集系统,能够将桥梁振动和环境风能同时转换为电能.当装置受到低频振动激励时,具有较低谐振频率的上悬臂梁开始振动,EMH 由于磁体和线圈的相对运动而发电,与此同时,黏贴在上悬臂梁上的压电材料也会由于振动而发电.当外激励频率较高时,下悬臂梁(固定线圈)的相对位移会更大(接近共振区域),因此EMH 也会产生电能.当周围脉动的风能冲击机翼时,升力使机翼和梁在竖直方向振动,同时在线圈和压电材料中产生电压.如图12(b),Hu 等[119]提出了一种基于梳状梁的压电风能采集系统,由主梁和一系列寄生梁共同构成多自由度系统,在气动激励下,主梁和寄生梁之间产生力的相互作用,在实验中能够将切入风速从2.24 m/s 降至1.96 m/s.在图12(c)中,Yu 等[120]提出了一种2-DOF 电磁能量采集系统,通过设计磁斥力和吸引力之间的相互作用来实现双稳态,可以通过调整两个共振峰之间的频宽提升能量采集系统的性能.Gu 等[121-122]提出了一种能够自调频的旋转能量采集系统,由一个相对刚性的压电梁和一个端部安装有末端质量的窄而柔性的驱动梁组成.末端质量在重力的影响下反复撞击发电梁而发电.旋转产生的离心力会改变柔性驱动梁的谐振频率和能量采集系统的动力学响应.经过参数优化设计,能量采集系统的谐振频率在4~16.2 Hz 的宽频范围内与旋转速度基本匹配.Kim 等[123]利用悬臂梁长度不同以及磁力调控设计了一个双稳态系统,在基座激励下,两个末端磁体相对的悬臂梁为相互耦合的双稳态系统,大幅度的阱间运动能够拓宽有效工作频宽和提高输出功率.如图12(d),也可以将该2-DOF 系统用于旋转能量采集,通过调整末端磁体的大小调整激励力幅值和磁力大小,有利于低转速下振动能量采集[124].某些超材料是一种常见的多自由度耦合结构,单胞结构阵列而成的多胞结构在激励下能够产生独特的动力学响应,有助于提升能量采集系统的性能.如图12(e),Xu 等[125]设计了一个带有中心集中质量的手状梁的单胞结构,能够最大限度地提高振动时手状梁结构与基底的有效接触面积.随后,将单胞结构阵列在板上,形成一种同时具有能量采集和振动控制的超材料,在低频范围内具有良好的能量采集和抑制振动特性.

图12 基于耦合多自由度系统的典型动力学调控能量采集系统: (a)振动-风能复合能量采集系统[118],(b)梳状梁风能采集系统[119],(c)2-DOF 电磁能量采集系统[120],(d)磁力调控2-DOF 系统[124],(e)超材料系统[125]Fig.12 Typical dynamic regulation energy harvesting systems based on coupled multi-DOF system: (a)vibration-wind energy harvesting system[118],(b)comb-like beam based wind energy harvesting system[119],(c)2-DOF electromagnetic energy harvesting system[120],(d)magnetic regulation 2-DOF system[124],(e)metamaterial system[125]
4 系统调控
能量采集系统所采集的能量源是分布式的、无序的、无线的高熵能源,系统的工况也是多变的,会显著影响能量采集系统的工作状态、输出性能、可靠性和使用寿命等.因此,需要针对不同的应用对象进行动力学设计与调控,使其能够满足多种工况,有助于提升能量采集系统的综合性能.按照动力学调控方法对其进行分类,主要分为两种类型: 自适应控制和策略控制.
4.1 自适应调控
自适应控制方法使能量采集系统根据激励形式的变化,自适应调控自身动力学特性(机构、结构和固有频率等),从而更加灵活地采集能量并满足不同需求.在汽车无级变速系统的启发下,Yong 等[126]提出了一种多级自动切换能量采集装置,基于同心双转轴结构设计,集成了两个不同形状、尺寸和风杯臂长的独立TENG.多级结构中的不同模块在不同风速下具有自适应性,能够在各自的风速范围内以最高效率收集风能并转换为电能,拓宽了系统的有效工作风速范围.棘轮棘爪可以自适应地选择性接受外界驱动,即当棘爪的速度大于棘轮,棘爪棘轮啮合,产生激励;当棘爪的速度小于棘轮,棘爪滑开,不阻碍棘轮工作.这样使得棘轮(即工作轮)可以最大化吸收外部激励能量,而不被外部激励反向作用阻碍.如图13(a)所示,Zhang 等[127-128]利用扭转驱动结构和棘轮离合器结构采集人体低频运动的机械能,在跑步机测试时,棘轮的最大转速为3700 r/min.Fan 等[129-130]设计了一种复合结构的拨片,具有棘爪的功能,在转子逆时针旋转时提供足够大的驱动力,转子顺时针旋转期间提供非常小的滑动摩擦阻力,能够将超低频激励转化为单向旋转,并且在外激励消失后转子仍旧保持较长时间旋转并输出电能.

图13 基于自适应调控的典型动力学调控能量采集系统: (a)扭转结构和棘轮系统[128],(b)自适应调整固有频率系统[135],(c)离心力自适应控制系统[138]Fig.13 Typical dynamic regulation energy harvesting systems based on adaptive regulation: (a)twist rod and ratchet system[128],(b)adaptive natural frequency adjustment system[135],(c)centrifugal force adaptive control system[138]
自适应调整固有频率的方法是压电悬臂梁能量采集系统中最常用的自适应控制方法[131-133].Kim 等[134]提出了一种自适应调频策略用于振动能量采集,在外界激励下,简支梁中间的质量块可以沿着梁滑动,根据外激励的变化自适应调节系统的谐振频率,使谐振频率与激励频率匹配,能够提高压电能量采集的输出效果.如图13(b)所示,Shin 等[135]也采用了类似的自适应调频策略.其工作原理为: 当在非谐振区间,滑块与悬臂梁振幅较小,滑块与悬臂梁之间的接触压力以及相对摩擦力也较小,滑块会产生滑动;当滑块滑到适当位置,使得系统谐振频率匹配激励频率,滑块与悬臂梁之间的振幅较大,两者之间的接触压力较大,滑块与悬臂梁之间的摩擦力足够大使得滑块不再滑动,与悬臂梁一起大幅振动.在实验中,该系统的有效工作频宽相比于没有自调频的系统扩大了1400%.在旋转能量采集系统中,可以利用离心力随着转速的变化自适应调整系统的刚度,从而适应不同的旋转激励,提升系统的电学输出性能[136-137].如图13(c)所示,Fang 等[138]建立了离心刚化和旋转软化的机电耦合方程,系统分析了离心力对压电悬臂梁在旋转激励下的影响.离心刚化效应可以拓宽系统的有效工作频宽,系统在高转速激励下具有更好的输出性能;旋转软化效应能够降低系统的谐振频率,更适用于低转速激励下的应用场景.此外,可以将非线性磁力与离心力配合使用,共同调控系统的动力学特性,进一步降低系统的有效工作频率[139].
4.2 策略调控
机械能量采集与自供能传感系统的能量流动过程为: 能量的输入(环境中机械能转换为规律可控的机械能)—能量的转换(机械能转换为电能)—能量的存储与利用(能源管理系统).因此,需要对整体系统进行策略控制,调控系统的动力学和电学性能.飞轮是典型的机械能量存储单元,可以作为一个整体用于调控系统中机械能与电能之间的转换.由于机电换能器在电能输出较大时在电路系统中的阻尼也会随之增大,用飞轮先存储机械能量,然后可控制地转换为电能,有助于提升系统整体的机电转换效率.如图14(a),Xie 等[140]利用飞轮单向旋转和储能的特点,设计了一个可以将随机触发运动转化为连续旋转运动的TENG.当对推杆施加随机触发运动时,推杆和独立飞轮将触发运动转化为轴的旋转运动,工作飞轮由旋转轴驱动以存储能量,并可连续高速旋转而产生电能.即使在触发运动停止后,飞轮仍旧可以保持一段时间的高速旋转而基于电磁单元或摩擦纳米发电机发电[141-144].平面涡卷弹簧(发条)也可以存贮弹性势能,并利用其弹力逐渐松开时产生动力.如图14(b),受到机械手表的启发,Han等[145]利用齿轮和扭转发条组成储能结构,发条采集不规则和低频运动能量并旋转齿轮,将能量传递给擒纵机构,擒纵机构将低频激励转换为扭转谐振器的高速旋转运动而发电,可以实现一种稳定、持久和高输出功率的TENG,在5 s 的输入激励下产生110 s (22 倍)的持久稳定输出功率.为了提升TENG的输出性能,王中林院士团队提出了电荷泵浦策略和电荷自泵浦摩擦纳米发电机[146-148].如图14(c),电荷泵浦能够将电荷存储在电极中,再根据需求释放到主发电机中,注入的束缚电荷可类同于摩擦静电荷激发电场,但其电荷密度理论上仅受到介电击穿强度的限制,同时不需要通过剧烈的摩擦产生,能够极大地提升TENG 的表面电荷密度,并且可以作为一种高性能基础元件用于连续或间歇地激励收集环境机械能[149].能量管理系统不仅可以将交流电转换为直流电,还可以通过多种电路处理方法和控制算法进一步减小能耗、提高能量采集系统的效率[150].如图14(d),由于非线性动力学系统与SECE 非线性电路系统结合,产生的阻尼效应影响动力学系统的非线性特性,不利于非线性刚度带来的较宽工作频域,Lallart 等[151]在SECE 中引入了相位延迟,在不损失过多输出功率的情况下,保证了有效工作带宽,平衡了工作带宽和机电转换效率之间的问题.
5 挑战和展望
机械能量采集具有灵活便捷、零碳环保和可持续等优势,能够与物联网、大数据和人工智能等技术结合,实现自供能的智慧互联,在人体健康监测、智慧医疗、生态环境监测、高精尖装备故障诊断、航空航天工程和海洋资源开发利用等领域具有广泛的应用前景.近年来,众多学者已经提出了多种动力学调控方法提升机械能量采集系统的综合性能,但是面向机械能量采集的工程应用需求,仍旧存在一些关键挑战.
(1)输出功率较低,难以满足工程应用需求.虽然近年来研究人员利用不同的动力学调控方法提升机械能量采集系统的输出功率,但是大部分器件的平均输出功率仍旧为μW 至mW 量级,少量器件可以突破W 量级.此外,大部分报道工作中的最大平均功率是指最佳激励工况下器件的平均输出功率,而难以保证实际工况复杂激励下的器件输出功率.因此,如何进一步提高能量采集系统适用于不同实际工况的平均输出功率是亟待解决的关键问题.
(2)现有动力学调控方法没有形成协同效果.尽管现有的频率提升、激励放大和非线性宽频等动力学调控方法从不同方面提升了机械能量采集系统的性能,但这些方法和技术是孤立的,可能会相互影响,没有形成协同提升效果.系统化考虑这些方法和技术有望提升系统综合性能和设计灵活性.但目前大部分研究对这些方法和技术的相互影响和协同效果的考虑很少或尚未涉及.
(3)较少考虑系统的可靠性、鲁棒性和环境适应性.目前,大部分动力学调控方法主要用于提升能量采集系统的输出功率,且大部分原理样机在实验室条件下进行定量测试和验证性测试.然而,面向实际应用,传感器分布广泛且有些传感器分布在恶劣环境区域,如何保证能量采集系统长期有效的功率输出?因此,器件的可靠性、鲁棒性和环境适应性也需要通过动力学调控方法进行设计和优化,使其能够切实解决工程问题.
针对这些关键挑战和当前动力学调控方法的研究现状,未来可以在以下几个方面继续开展深入研究.
(1)完善动力学调控方法体系.本文构建了基本的机械能量采集动力学调控方法体系.其中,激励调制方法能够在能量输入端,即外激励与能量采集系统之间进行调控;非线性系统、多自由度系统从器件的机械结构部分改善系统动力学行为;系统调控方法综合考虑了整体系统的动力学和电学特性进行调控.在未来,还需要阐明动力学调控原理与方法论,建立动力学调控案例库,为机械能量采集系统非标设计提供参考.
(2)考虑动力学调控方法与其他相关技术集成设计,提升系统综合性能.机械能量采集系统由机电转换材料、机械结构、电路系统等几个关键部分构成.未来可以考虑将动力学调控方法与新材料结构设计结合,比如利用超材料结构特性实现力学调控.目前,大多数能量采集系统的能量管理单元主要采用滤波整流,升压降压以及储能单元作为能量采集系统和用电器之间的桥梁,较少考虑电路系统与动力学系统(机械结构)的匹配设计,能量损耗较大.因此,可以将动力学调控方法与电路优化设计方法相结合,进一步提升系统综合性能.
(3)面向工程应用,推动能量采集系统产品化.目前能量采集的研究大多只是在实验室或模拟环境中进行原理性验证,很少考虑能量采集系统在复杂环境下的适应性.动力学调控方法是推动能量采集技术从实验室走向工程应用的重要途径,但距离能量采集系统的产品化仍有大量工作需要进行.例如,可穿戴人体运动能量采集系统需要考虑轻量化设计和人体舒适性,波浪能量采集系统需要考虑海水腐蚀和风吹日晒下器件的可靠性等.需要建立详细的能量采集产品机电转换效率、输出功率、可靠性、兼容性和环境适应性等测试和评估标准,以推动能量采集系统产品化.
6 结论
动力学调控方法改善了机械能量采集系统的动力学特性,使其与特定的环境激励相匹配,提升了机械能量采集系统的俘能效果、机电转换效率和输出电学性能.本文构建了包括激励调制、非线性系统、多自由度系统、自适应控制和策略调控等方法的机械能量采集动力学调控方法体系,论述了动力学调控方法的最新研究进展,包括每类动力学调控方法的特点和典型设计,给出了动力学调控方法的关键挑战和未来发展方向.本文不仅为机械能量采集系统适应复杂环境激励提供了新的动力学调控视角,还构建初步的方法体系,以及可供参考的具体设计,有益于促进机械能量采集基础理论与应用技术的发展.
