电控正流量挖掘机分工况功率匹配研究
2023-11-10樊一宁杜常清邹斌徐玉兵
樊一宁,杜常清,邹斌,徐玉兵
(1.武汉理工大学汽车工程学院,湖北武汉 430070;2.武汉理工大学现代汽车零部件技术湖北省重点实验室,湖北武汉 430070)
0 前言
挖掘设备是工程施工的主要机械装备之一,广泛应用于矿山挖掘、交通运输、道路建设等机械化施工中[1]。但在能量传递的过程中,发动机的输出功率与挖掘机输出的有效功率并不相等,大部分功率被消耗,包括节流损失、溢流损失、沿程损失、势能损失以及功率不匹配导致的能量损耗,其中大部分功率消耗在了液压系统的各元件中[2]。
挖掘机的流量控制方式有负流量控制、正流量控制以及负载敏感控制。负流量系统仍然无法从根本上解决挖掘机外负载剧烈变动的问题,导致柴油发动机的工作点频繁波动,从而降低发动机燃油效率[3],因此文中选用正流量控制方式。
国内挖掘机厂商由于技术相对滞后,大多采用成本较低、结构较简单的负流量控制液压挖掘机,然而近些年,国内厂商逐渐研究性能更好的正流量控制方式,但技术相对不是很成熟[4]。针对于国内挖掘机的发展方向,许多学者进行了深入的研究。青岛大学丁波[5]建立了正流量恒功率泵模型,分析了恒功率特性,验证了模型的可行性;燕山大学王维福[6]以正流量挖掘机为研究对象,对挖掘机正流量液压系统压力损失进行了分析,改进多路阀合流方式,降低了能量损耗。但是关于正流量控制系统的研究仍然存在许多问题,如针对双泵的功率匹配研究较少、恒功率控制特性差、系统震动问题严重等。
针对目前电控正流量挖掘机系统研究较少、空载时能量损失较大、发动机与主泵功率不匹配以及节能控制效果不佳的问题,本文作者以某公司大型挖掘机为研究对象,搭建基于AMESim和Simulink的挖掘机电液系统联合仿真平台,通过分工况功率匹配仿真实验研究,验证所搭建的电控正流量挖掘机系统的有效性。
1 正流量挖掘机分工况功率匹配研究
1.1 电控正流量系统原理分析
正流量挖掘机在反馈速度及节能效果上表现突出。电控正流量变量泵增加了2个电磁比例阀,可以在控制器中对输入信号进行控制算法处理,以改变变量泵排量,实现对主泵的恒功率控制[7]。表1对比了3种挖掘机流量控制方式,从节能等7个方面进行对比分析。

表1 正负流量特性对比
由表1可知,正流量系统性能优越,文中所研究的挖掘机控制系统采用的电液伺服系统控制原理如图1所示。

图1 电液比例系统结构
1.2 分工况控制分析
挖掘机的实时工况十分复杂,为了保证在应对不同工况时挖掘机可以采用不同的功率模式以降低能耗,采用分工况功率匹配的方式来适应不同的作业要求。
文中研究的挖掘机按照所需功率不同可以分为重负荷作业模式、标准作业模式以及普通作业模式。重负荷作业模式下,发动机处于全油门工况,发动机工作于外特性曲线上,发动机输出该转速下的最大功率。标准作业模式适用于挖掘机正常工况,该模式发动机处于全油门的90%,在提供较大功率的同时,可以节省燃油。普通作业模式,该模式发动机处于全油门的80%,更加注重经济性,对需求功率和燃油消耗率的要求不高,挖机运行平稳。文中研究挖掘机发动机转速扭矩曲线和转速功率曲线如图2、3所示。

图2 发动机转速-扭矩 图3 发动机转速-功率
实车试验中,发动机挡位通过旋钮调节,共10个挡位,通过对比发动机油门的喷油量与目标转速喷油量,使发动机可以在目标转速下工作。不同工况模式可以在仪表盘上进行调节。当发动机长时间无动作时将进入怠速模式,也可人工调节,由图4中“乌龟”及“兔子”显示。

图4 挖掘机控制界面
2 基于AMESim的正流量系统建模
文中选用AMESim作为仿真分析的软件。AMESim的建模仿真过程基本可以分为4步:建立草图、子模型选择、参数设置和求解[8]。
模型主要包括液压泵组、多路阀组、执行机构的建模。根据研究车型的液压原理,运用AMESim进行建模,如图5所示。

图5 全电控正流量液压泵组
2.1 三位六通换向阀
三位六通换向阀的原理如图6所示。A、B口连接油缸的大腔和小腔,P、D口负责连接主泵,T口直接连接接回油路,C口负责连接下一主阀的P口。当换向阀的阀芯位于中位时,液压油直接从D口流入,通过C口流回油箱。当先导压力存在时,换向阀接收到先导信号后切换至左位或右位,进一步分配流量。

图6 三位六通换向阀原理
2.2 电控正流量泵
电控正流量液压泵主要由2个变量液压泵、1个先导泵、1个电磁比例阀以及变量机构组成[5]。在AMESim软件中建立图7所示的电控正流量泵元件级模型。

图7 电控正流量液压泵AMESim模型
2.3 模型组成
通过对动臂、斗杆和铲斗液压缸进行参数设置,如表2所示,在AMESim中建立图8所示的液压模型。

图8 AMESim被控对象模型

表2 液压元件参数设置单位:mm
3 基于Simulink的控制策略建模
基于MATLAB强大的数值计算能力,在Simulink下建立系统框图和仿真环境,在各个工程领域发挥巨大的作用[9]。
在Simulink中基于Stateflow搭建电控正流量挖掘机系统模型,主要分为输入信号处理、转速感应控制、控制对象状态判断、电磁阀流量分配以及双泵排量信号处理5个模块。通过联合仿真,验证控制策略的有效性。控制策略如图9—11所示。控制流程如图12所示。

图9 输入信号处理及转速感应模块
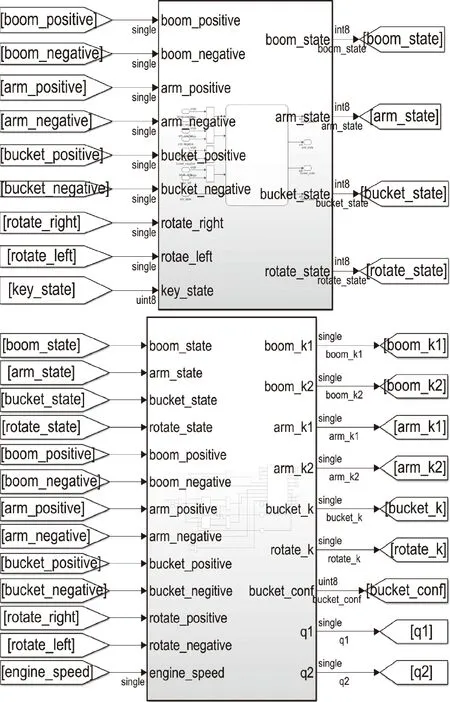
图10 控制对象状态判断及电磁阀流量分配模块

图11 双泵排量信号处理模块
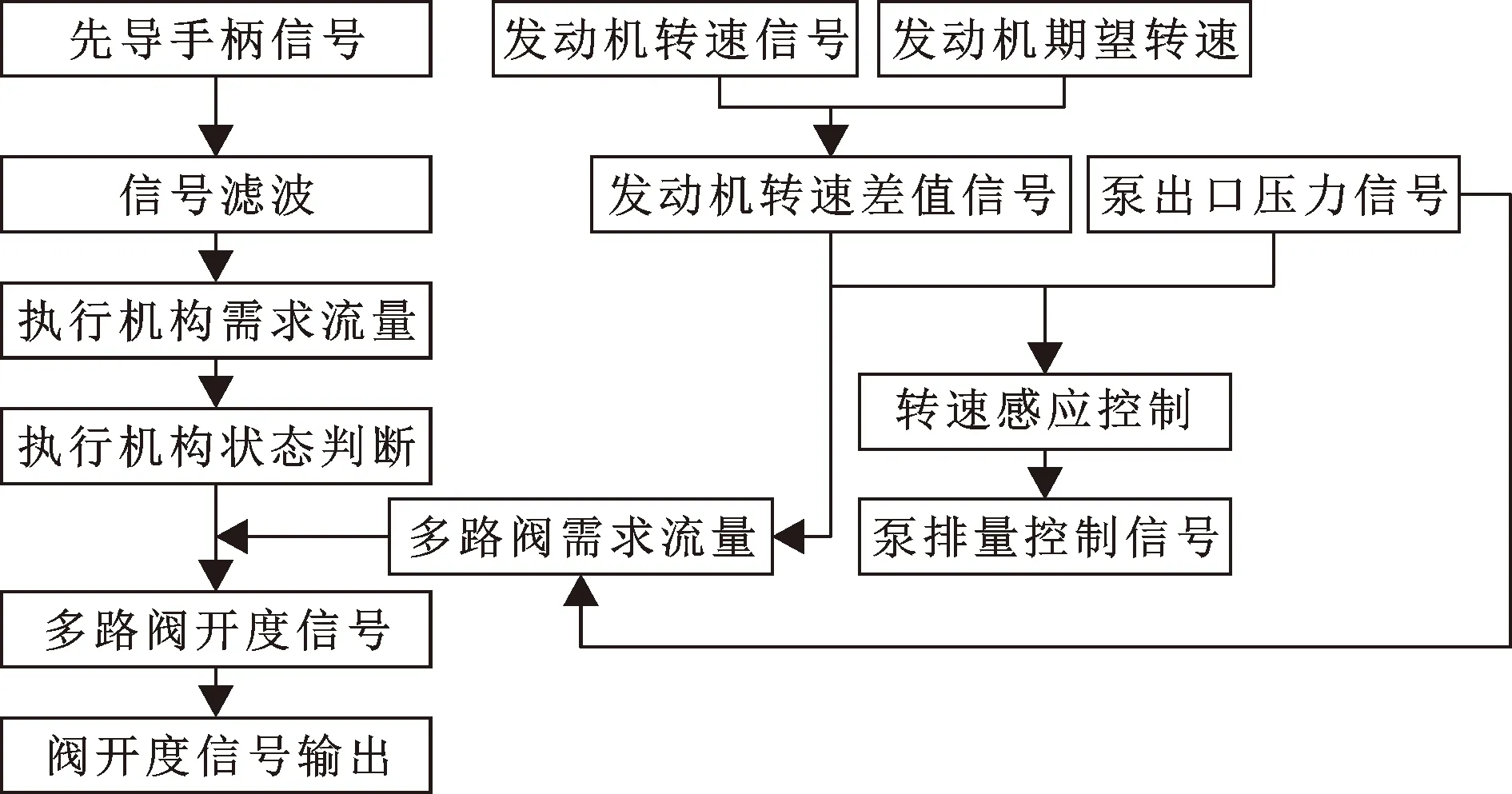
图12 控制流程
3.1 输入信号处理模块
输入信号处理模块中,手柄信号即输入信号。通过采集手柄先导信号,为防止输出信号在2种信号之间变化过于频繁,对手柄信号设置±0.5的死区,设计一阶低通滤波器处理滤波,去除信号中的噪声。接收x、y方向上在内的共6个手柄先导信号、液压泵出口压力信号、发动机转速信号和挖掘机启停开关信号。通过CAN解析后,结合查表模块得出执行机构的需求流量[10]。
文中采用最通用的一阶低通滤波器,其数学模式如式(1)所示:
Yn=qXn+(1-q)Yn-1
(1)
式中:q为滤波器的时间常数,取q=0.15;Xn为第n次采样时的滤波器输入;Yn为第n次采样时的滤波器输出。
3.2 转速感应控制模块
转速感应控制模块通过采集发动机实时转速,与目标转速进行对比,将差值发送到工作区间,为后续电磁阀流量分配和开度信号提供目标值。同时在分工况控制模式中,需要提供目标转速及其喷油量,以便通过喷油量的变化使发动机在目标转速下工作。
3.3 控制对象状态判断模块
控制对象状态判断模块的总体目标是根据工作装置的需求量信号,采集各执行机构以及钥匙的控制状态,从而判断液压系统的工作状态,给出状态信号。图13、14分别为状态判断模块控制流程以及判断铲斗状态的Stateflow模块。

图13 状态判断模块控制流程

图14 铲斗状态判断模块
3.4 电磁阀流量分配模块
电磁阀流量分配模块总体目标是根据上2个模块输出的执行机构状态信号和需求流量,结合发动机转速信号以及变量泵出口压力信号实现各执行机构的控制过程,输出各执行机构的换向阀开度、合流信号以及p1、p2侧油路需求总流量。该模块流程如图15所示。

图15 流量分配模块控制流程
控制策略模块整体结构如图16所示。在该子模块中,首先是根据泵控制曲线的I-Q曲线,结合发动机转速得到相应转速下的动臂/斗杆合流的流量阈值,然后对动臂、斗杆进行主副阀流量分配,并将工作装置的输入信号进行整合,结合状态信号,通过Stateflow逻辑模块输出相关的控制阀开度、合流信号以及流量信号。

图16 电磁阀流量分配控制策略模型
由于模型是双变量泵工作,因此,为了提高工作效率,在挖掘机单动作时有一套独立的供油规则,如表3所示。逻辑模块内部如图17所示。
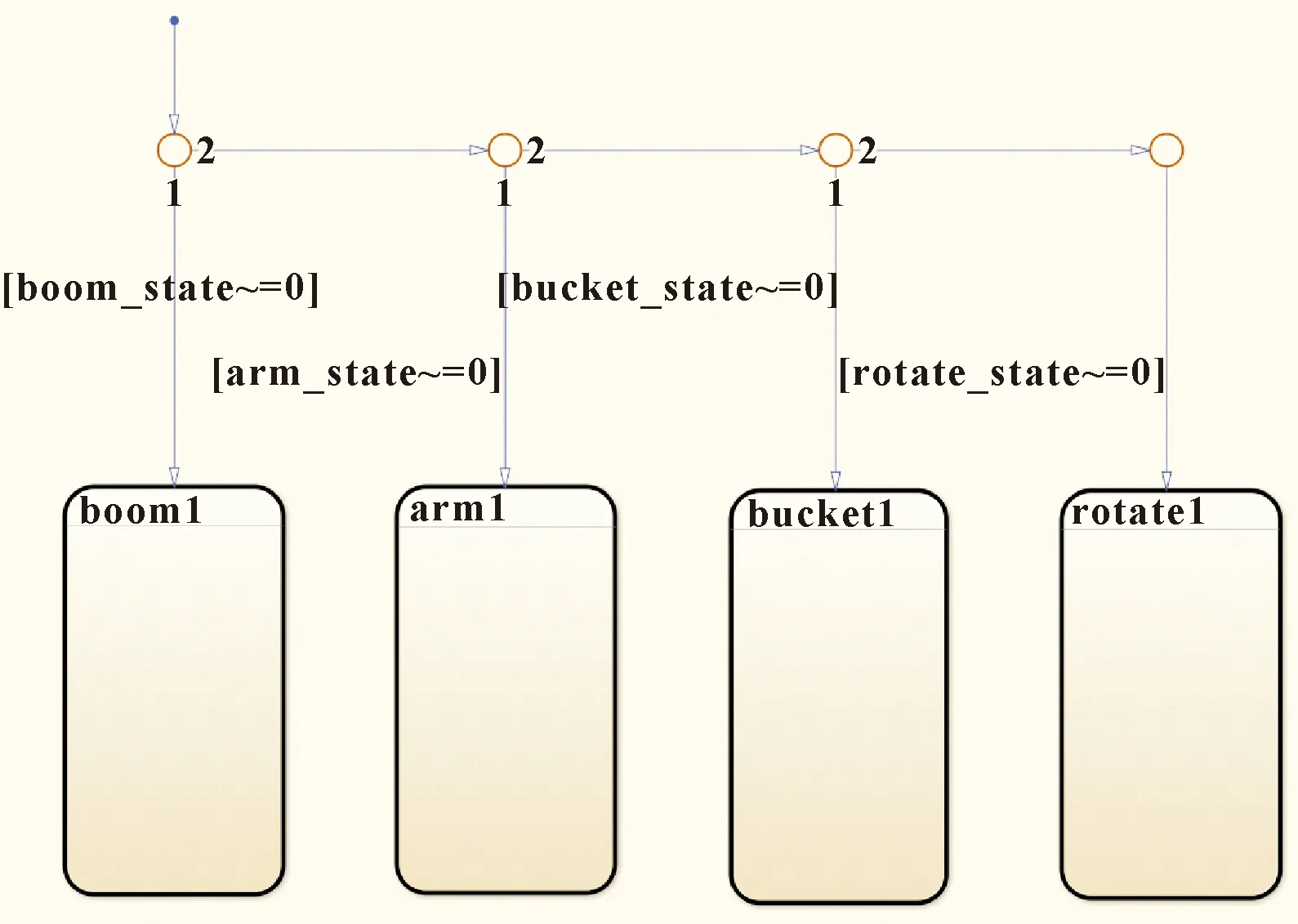
图17 流量分配函数模块

图18 动臂动作主副阀流量分配

表3 单动作供油策略
液压油先经过多路阀,之后进入执行机构油缸,阀口开度与经过多路阀的液压油流量有关,流量特性如式(2)所示:
(2)
式中:C为流量系数;ρ为液压油密度;A为多路阀阀口开度;Q为流经阀口的流量,即相应执行机构的需求流量;Δp为流过控制阀的液压油前后压力差,可由主阀参数表中的压降数据计算得到。即可根据式(2)得到多路阀开度信号。
3.5 发动机-泵功率匹配
发动机-泵功率匹配的目的是使发动机的输出扭矩充分被液压泵吸收。恒功率泵通过调节排量对泵的功率进行控制,使稳定转速下运行的发动机输出的扭矩为一个定值。 发动机的输出功率应被泵完全吸收,即发动机的输出功率应与泵的吸收功率相等,如式(3)所示:
Ne=Np
(3)
式中:p1、p2、q1、q2分别为主泵1和主泵2的液压油出口压力和液压油排量。因为发动机和变量泵处于同一轴,因此满足式中ne=np,在此前提下,如果要使发动机发出的功率损失最小,理论上则应该满足变量泵的吸收扭矩Mp实时跟踪发动机的输出扭矩Me。主泵的出口压力只由受到的外负载决定,因此在实际工况中,要求控制器可以实时地调节变量泵的排量。
3.6 泵恒功率控制
在发动机-泵的功率匹配中,大多采用恒功率控制的方式提高功率利用率。恒功率控制是一种变量泵控制方法,可以保证泵的输出压力与输出流量的乘积为一定值,根据系统中压力的变化,调节变量泵排量[11]。恒功率控制的难点在于精确恒功率控制的输出特性,充分利用柴油机功率。传统挖掘机采用分功率控制的控制方式,即双泵都拥有一个恒功率调节器,双泵的流量受各自所在回路压力的影响,每个泵最多只能吸收柴油机50%的功率。当一个泵的压力过低时,另一个泵无法吸收多余功率,柴油机功率无法充分利用,造成极大的功率浪费;同时因为分功率控制是将双变量泵直接组合在一起,且只有在泵压力调节范围内才能充分利用发动机功率,严重限制了挖掘机的工作能力,因此不采用分功率控制。文中提出的基于双变量泵的发动机-泵功率匹配方法采用恒功率控制,解决了分功率控制中每个泵只能吸收发动机50%功率的问题,极大提高了发动机功率的利用率,使电控正流量系统挖掘机可以在不同工况下实现恒功率控制,实现发动机的功率控制,其控制框图如图19所示。通过比较双泵总的需求功率与发动机额定功率,可以进一步达到提高功率利用率的目的。当双泵总的需求功率小于发动机的额定功率时,泵1与泵2的输出功率按采集到的泵出口压力与需求流量的乘积,即双泵的需求功率进行输出。当双泵总的需求功率大于发动机的额定功率或者二者相同时,泵1与泵2的输出功率全部按照发动机的额定功率进行按比例分配,同时满足泵1与泵2的功率需求。

图19 恒功率控制流程
4 电控正流量挖掘机仿真分析
4.1 联合仿真
文中采用AMESim与Simulink进行联合仿真。流程如下:
在AMESim中建立SimuCosim接口,连接模型,设置模型参数;AMESim在所属文件路径生成可在Simulink中加载的.mex64文件;在Simulink中建立AME2SLCoSim接口,连接模型,加载.mex64文件,进行仿真。图20和图21分别为在Simulink和AMESim中建立接口模块。

图20 Simulink联合仿真模块

图21 AMESim联合仿真模块
进行单动作仿真时,控制手柄信号观察执行机构液压缸的响应情况[12]。表2中列举了液压元件的参数设置,除此之外的液压元件均采用默认参数。图22—24为各动作仿真曲线。

图22 动臂油缸仿真曲线
4.2 单动作仿真
挖掘机的运动可拆分成7个基础动作:动臂提升下降、斗杆内收外摆、铲斗挖掘卸载、回转左右回转。增加负载后开始仿真。文中以动臂提升下降仿真曲线为例,研究所建模型系统的输出特性。
如图22所示,动臂油缸在仿真开始阶段处于位移为0位置,活塞杆全部缩回。t=1 s时,给出先导压力,阀芯位移,活塞杆移动。动臂油缸大腔和小腔压力急速上升,在短暂的系统震荡后,在t=1.4 s处压力趋于稳定。在t=3.2 s时,活塞运动到极限位置,动臂油缸大腔压力快速上升到最大压力,小腔压力快速下降,由于中间没有给出先导压力,大小腔压力基本不变。当t=5.5 s时,先导压力使换向阀打开,活塞杆下降,动臂靠自身重力快速下降,因此下降时的缸内压力低于提升时的缸内压力。到t=7.5 s时,动臂油缸活塞移动完毕,关闭换向阀,动臂油缸大腔压力迅速降低,基本趋向于0。
斗杆油缸、铲斗油缸仿真曲线分别如图23—24所示。经过分析,动臂、斗杆和铲斗机构的仿真特性符合预期。
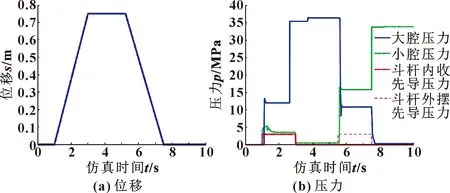
图23 斗杆油缸仿真曲线

图24 铲斗油缸仿真曲线
4.3 泵恒功率控制算法对比
通过仿真分析对比2种泵恒功率控制算法:(1)传统的分功率控制;(2)文中改进的恒功率控制。按动臂提升单动作为例,工作区间1~3 s,设置最大功率为128 kW,仿真曲线如图25所示。

图25 改进泵控制曲线
由图25得出:在分功率控制下,双泵功率平均分配,泵1功率为64 kW,泵2吸收30 kW,超过30 kW的功率无法被有效利用,造成严重的功率浪费;在改进恒功率控制下,可以满足泵1的功率需求,发动机功率得到充分利用,符合性能要求。
5 电控正流量挖掘机实验研究
5.1 实验设备
通过以上仿真测试验证了搭建的电控正流量系统的有效性,之后进一步通过实验验证,同时验证分工况功率匹配特性。图26是测试用机型。

图26 实验机型
5.2 分工况实验结果分析
在实车实验中,改变工况模式的同时采用复合动作测试,测试开始时,铲斗尖接触地面。如图27所示,给手柄先导信号,动臂开始提升,双泵压力在提升的过程中存在系统震荡,开始时存在一定的压力波动。在动臂到达一定高度之后,8~10 s存在短暂的悬停时间,10 s时,开始操作斗杆外摆和铲斗卸载,14 s左右操作动臂下降一定高度,18 s左右开始操作斗杆内收和铲斗挖掘,一共4个阶段。

图27 主泵出口压力曲线
如图28、29所示,由双泵的出口流量曲线可以得出:选择不同模式,增加油门开度时,泵的出口流量加大,发动机输出功率增大,泵的吸收功率同时增大。主泵的输出功率曲线在不同的工况模式下整体走势较为平缓,达到了泵的恒功率控制,实现了对发动机的功率控制。

图28 主泵1实验曲线

图29 主泵2实验曲线
6 结论
文中以某大型挖掘机系统为研究对象,基于AMESim和Simulink建立了联合仿真平台,搭建了电控挖掘机系统,提出了一种双变量泵的发动机-泵恒功率控制方法,通过对挖掘机单动作的仿真验证了模型的有效性。在实车实验中,采集了不同工况模式下挖机复合动作的双泵出口压力、出口流量以及输出功率,得到实验曲线。结果表明:文中所设计的仿真模型以及功率匹配策略表现良好,仿真和实验中,在不同的工况模式均可以保证泵的恒功率特性,实现对发动机的功率控制。