动作预判与知觉信息整合对高尔夫推杆成绩的影响
2023-11-09常文青王兆侠
常文青, 王兆侠
( 1. 莆田学院 体育学院, 福建 莆田 351100;2. 洛阳师范学院 体育学院, 河南 洛阳 471000 )
0 引言
个体的动作是一种探索周围环境的过程, 主动预判对于动作的完成至关重要。 主动预判是个体整合知觉信息与运动技能, 并对将要发生的动作做出的预判, 例如优秀的高尔夫球选手在推杆前, 身体已经做好了预期控制。 有研究表明, 在不同运动领域, 优秀运动员比新手运动员在动作预判方面表现出更强的能力[1-3], 而动作预判需要行动和感知之间的密切联系[4]。 生态学理论认为感官对外部世界的描述是非常丰富、 精细和准确的[5], 视觉系统可以直接探索和检测这些外部信息。 虽然不同理论对于感知环境信息是直接还是间接存在分歧, 但是以视觉信息为基础的主动预判, 使个体在完成动作时学习了执行任务过程中变化或保持不变的属性, 学习了个体与外部环境协调时可能出现的问题, 学习了一种前瞻性的行动方式, 并最终为专项知觉动作技能的形成创造条件。
高尔夫是以体能表现、 技能表现、 心理表现为特征的运动项目, 有研究指出我国高尔夫选手与世界优秀高尔夫选手在小肌肉群爆发力以及技能的稳定性上存在差距[6-7]。 核心肌肉群爆发力会影响击球速度, 而技能的稳定性对击打精度至关重要。 高尔夫推杆作为一项对稳定性要求极高的技能动作, 无论是高差点选手还是低差点选手, 都有平均42%的杆数浪费在推杆上, 就说如果你的成绩是100 杆, 那么约有42 杆是推杆[8]。 对于职业球员而言, 一场比赛中推杆杆数能占到总杆数的40%以上[9]。 由此可见, 推杆准确率的好坏对运动员的总成绩与排名有着至关重要的作用。 目前国内关于青少年高尔夫的研究较多集中于挥杆技术、 体能训练等, 关于推杆训练方法的研究较少。
影响推杆准确率的心理因素众多。 祝大鹏等的研究表明, 先前经验、 认知加工策略(认知表征、 多感官表象与动作整合)、 专项感知(环境信息检测)、 注意选择会对推杆技能学习产生影响[10]。 对于初学者而言, 需要经过一段时间的学习才能对高尔夫运动的比赛规则、 运动规律、比赛场地、 器械使用等形成相对清晰的认知结构。 例如在本次实验中, 整合组被试在推杆前先对推杆距离作出动作预测, 并通过视觉获取最佳的上杆区间, 推杆后通过听觉获取击球后的送杆距离与实验标准值之间的误差。 被试在练习中重复感知实验环境信息, 有助于在封闭技能练习中快速形成动作固定性[11], 从而提高推杆动作的稳定性、 一致性, 并最终提高成绩。 本文将信息整合与环境信息检测作为研究重点, 提出两点假设: 假设1, 在青少年初学阶段动作预判与视觉信息整合对知觉运动技能的快速形成具有显著作用; 假设2, 视觉信息整合对青少年初学者获取并检测环境信息具有积极影响。 并通过生态学理论对两点假设进行验证。 目前国内有关动作预判与知觉信息整合的实证研究较少, 且青少年高尔夫推杆成绩在技能习得与保持阶段的研究数据不充足。 本文讨论动作预判与知觉信息整合对于青少年初学者是否有效, 以及在经过一段时间训练后能否提高该技能, 以期为提高高尔夫推杆准确率提供有效的训练手段。
1 研究对象与方法
1.1 研究对象
以K 市某训练营24 名青少年高尔夫初学者(男15, 女9)为研究对象。 身高(149.7±1.7)cm, 体重(44.5±1.9)kg, 年龄(13.2±1.4)岁,所有被试均是第一次参加类似实验。
1.2 研究方法
1.2.1 实验设计
任何领域的专项水平都是10 年以上专业训练的结果[12], 因此从高尔夫俱乐部邀请5 名运动年龄均在10 年以上的专业选手为实验提供设计标准。 5 名选手身高(173.7±3.1)cm, 体重(77.1±4.4)kg, 年龄(32.5±3.4)岁, 骨骼肌量35.7%±2.7%。 在练习场内设置一条长550 cm宽240 cm 的实验区, B 线到球洞中心点为5 码(457.2 cm)。 在实验开始前, 先让被试在5 码距离练习推杆20 min, 之后正式开始实验。
5 名被试每人推杆10 次, 共测试50 次。 利用高速摄像机记录上杆区间A~B 的距离(16.9±1.6)cm 及送杆区间B ~C 的距离(29.2±1.9)cm, 比值为1.00 ∶1.73。 为方便后续实验数据统计, 将A~B 距离与B ~C 距离使用小数点后计数保留法, 设定A ~B 距离17 cm、 B ~C 距离29 cm, 比值为1.00 ∶1.71, 这一结果与孙胜的分析结果相似[13]。 在A 线(距离B 线17cm)和C线(距离B 线29 cm)位置各布置一条长240 cm、宽4 cm 的标记线, 设为推杆动作“合理区”。 记录得分区由长和宽均是240 cm 的正方形构成,每条平行线的间距为10 cm, 根据文[14-15]可计算高尔夫球最终停留位置的。
1.2.2 实验控制
在实验正式开始前, 24 名被试采用单盲分为3 组, 每组8 人, 每组被试均随机排列推杆顺序; 对被试的身高、 体重、 年龄等进行测量, 通过SPSS 软件对数值进行单因素方差分析, 均不存在统计学差异; 对记录员进行统一培训, 对球杆的位置距离、 高尔夫球的停止区域进行统一的标准确定, 从而保证测量标准的一致性。
1.2.3 材料
预判组使用定制灰白条纹作为推杆实验区, 宽度1cm, “标准区” 宽度4cm。 A 线、 C 线、 “标准区” 对被试不可见, 只有记录员知晓。 见图1。

图1 预判组推杆距离示意图
视觉组将上杆区间A~B(16.9 cm)设计为蓝色区域, 送杆区间B~C(29.2 cm)设计为黄色区域, 分别在A 线、 C 线上粘贴4.0 cm 黑色纸胶带。 见图2。
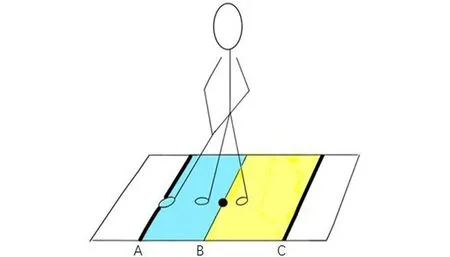
图2 视觉组推杆区间示意图
整合组在A、 B 线两端各延长10 cm, A 线左侧标记为“+”、 右侧标记为“-”, B 线左侧标记为“-”、 右侧标记为“+”。 例如上杆时球杆在A 线左侧位置提示为“超出标准2 cm”,在A 线右侧位置提示为“未到标准1 cm”, 在标准区内提示“合理”; 送杆区间的B 线使用相同提示方法。
1.2.4 实验器械
高尔夫练习毯、 高尔夫球杆、 索尼摄像机、惠普笔记本电脑、 ipad、 量尺等。
1.2.5 实验步骤
(1) 前测阶段
在实验开始前对24 名被试的年龄、 身高、体重等进行测试。
(2)实验阶段
技能习得阶段实验周期为3 周, 每周2 次课, 共6 次课。 每课每人3 轮, 每人每轮推杆10 次, 总共测试4 320 次。 在测试开始前对被试进行培训, 让被试学习高尔夫的基本知识, 在2码(182.9 cm)距离练习推杆动作, 熟悉实验场地, 并要求被试在推杆时按照上杆与送杆的比例, 保持不同区间的推杆距离。
预判组每次推杆前需要对上杆与送杆的距离进行预判, 在动作完成后需要对上一次的推杆距离进行复述, 例如“超出上杆3 cm” “未达送杆3 cm” 等。 记录员Ⅰ通过高速摄像机记录球杆在上杆区间的位置, 对于推杆距离超过或者未到达“标准区” 的推杆动作用语言提示, 例如“超出标准2 cm” “未达标准3 cm” “合理”。 记录员Ⅱ通过另一台摄像机记录球杆在送杆区间的位置,使用与记录员Ⅰ相同方法提示被试。 记录员Ⅲ负责记录推杆成绩并及时清理球场。 记录员的语言提示全部采用即时反馈。
视觉组按照上杆与送杆实验标准推杆, 记录员Ⅰ将每次的推杆成绩输入Excel, 记录员Ⅱ负责协助并根据现场情况清理场地。 整合组将以上两种方法相结合。
(3)技能保持与迁移测试
实验阶段结束48 h 后, 3 组被试在5 码正常推杆场地测试推杆成绩。 每人每轮推杆10 次,测试两轮共480 次。 迁移测试实验阶段结束72 h后进行, 3 组被试在7 码(640.1 cm)正常推杆场地测试推杆成绩。 每人每轮推杆10 次, 测试两轮共480 次。
1.2.6 统计方法
(1)测试数据计算方法
通过式(1)[14-15]计算平均半径误差MRE(mean radial error), 该值可以测试被试的推杆准确性。
通过式(2)[14-15]计算组质心径向误差GRE(group-centroid radial error), 该值可以测试整组被试的推杆稳定性。
通过式(3)[14-15]计算二元变量误差BVE(bivariate variable error), 该值可以测试被试推杆的一致性。
其中,x表示横坐标数值,y表示纵坐标数值,i表示第几次练习,m、n表示练习总次数。 (2)统计软件
使用EXCEL2019 对数据进行输入、 使用SPSS23 对数据进行K-S 检验、 单因素方差分析等。
2 研究结果
2.1 技能习得阶段
进行单样本K-S 值检验发现MRE、 GRE、BVE 均呈现正态分布(P >0.05), 方差齐性检验结果分别为:P=0.431,P=0.179,P=0.120, 说明各组数据满足方差分析的条件。 对3 组被试推杆的MRE、 GRE、 BVE 分别进行单因素方差分析表明, 在习得阶段MRE、 GRE、BVE 的分组方式主效应显著,F值分别为:F(2, 21)= 11.972,F(2, 21)= 10.943,F(2, 21)=3.905,P值均<0.05。 在MRE 各组之间多重比较表明, 整合组推杆准确性显著高于视觉组(P <0.05)、 预判组(P <0.01), 而视觉组推杆准确性显著高于预判组(P <0.05)。 在GRE 各组之间多重比较表明, 整合组推杆稳定性显著高于视觉组(P <0.05) 与预判组(P <0.01), 而视觉组推杆稳定性显著高于预判组(P <0.05)。 在BVE各组之间多重比较表明, 整合组推杆一致性显著高于视觉组(P <0.05)、 预判组(P <0.05), 而视觉组推杆稳定性与预判组推杆稳定性不存在显著性差异(P >0.05)。 见表1。
表1 高尔夫推杆在技能习得阶段准确性单因素方差分析结果()

表1 高尔夫推杆在技能习得阶段准确性单因素方差分析结果()
注: 表中,*为与整合组相比P <0.05, Δ 为与视觉组相比P <0.05。 表2、 表3 同。
?
2.2 技能保持阶段
进行单样本K-S 值检验发现MRE、 GRE、BVE 均呈正态分布(P >0.05)。 方差齐性检验结果分别为:P= 0.110,P= 0.370,P=0.126, 说明各组数据满足方差分析的条件。 对3 组被试推杆的MRE、 GRE、 BVE 分别进行单因素方差分析表明, 在保持阶段MRE、 GRE、BVE 的分组方式主效应显著,F值分别为:F(2, 21)=15.104,F(2, 21)=3.724,F(2,21)=4.052,P值均<0.05。 在MRE 组之间多重比较表明, 整合组推杆准确性显著高于预判组(P <0.05)、 视觉组(P <0.01), 预判组推杆准确性显著高于视觉组(P <0.01)。 在GRE 各组之间多重比较表明, 整合组推杆准确性显著高于预判组(P <0.05)、 视觉组(P <0.05), 而预判组推杆准确性与视觉组不存在显著差异(P >0.05)。 在BVE 各组之间多重比较表明,整合组推杆一致性显著高于与预判组(P <0.05)、 视觉组(P <0.05), 而预判组推杆一致性与视觉组推杆一致性不存在显著差异(P >0.05)。 见表2。
表2 高尔夫推杆在技能保持阶段一致性单因素方差分析结果()

表2 高尔夫推杆在技能保持阶段一致性单因素方差分析结果()
?
2.3 技能迁移阶段
研究结果表明, 动作技能迁移阶段MRE、GRE、 BVE 呈现正太分布(P >0.05), 方差齐性检验结果分别为:P=0.622,P=0.962,P=0.516, 说明各组数据满足方差分析的条件。 单因素方差分析表明, MRE、 GRE 分组方式主效应不显著(P >0.05), 但描述性统计结果显示整合组数据好于各组。BVE分组方式主效应显著(F(2, 21)=4.264,P <0.05) , BVE 多重比较表明整合组推杆一致性显著高于预判组(P <0.05)、 视觉组(P <0.05), 而预判组推杆一致性与视觉组不存在显著差异(P >0.05)。 见表3。
表3 高尔夫推杆技能迁移阶段一致性单因素方差分析结果()

表3 高尔夫推杆技能迁移阶段一致性单因素方差分析结果()
?
3 讨论
3.1 信息整合能力的形成
信息整合本身既包含知觉成分又包含动作成分。 知觉信息(视觉、 听觉、 本体感觉等) 会随着从事运动时间的增加而积累, 技术动作也会随着练习次数的增加而形成固定的协调模式。 在推杆练习中, 整合组被试随着知觉信息与运动经验的增加, 知觉变量与运动的动态整合使肌肉与关节原来的协调结构发生改变[16-17]。 虽然新协调结构会导致青少年初学者在完成动作时表现困难, 但克服这些困难后可以使整合组被试获得比其他组更好的身体稳定性以及更强的适应环境条件变化的能力。
通过研究发现, 首先, 整合组在技能习得阶段的3 项数据(MRE、 GRE、 BVE)均显著好于各组, 可以推断整合组被试在经过一段时间的练习后, 知觉-运动技能已经形成, 并通过将知觉信息与运动技能整合形成了新的适合推杆环境的协调结构。 其次, 整合组反复受到距离预判信息与听觉反馈, 进一步强化了肌肉、 关节与知觉信息的整合能力, 能够较为精准地固定上杆与送杆的区间。 虽然视觉组与预判组在习得阶段同样获得了知觉信息反馈, 但视觉组缺少了主动的预判,3 项数据均显著低于整合组。 以上结果支持了假设1。 第2 个假设是信息整合对于青少年初学者获取并检测环境信息具有积极影响。 从生态学角度分析, 知觉信息获取与运动学习是一个动态过程, 知觉信息获取离不开周围环境, 而个体特征与环境特征之间的相互契合称为可供性[18], 发现并检测可供性对运动学习至关重要[19]。 整合组被试在习得阶段练习推杆时, 将个体特征(如高、 力量、 情绪等)与环境特征(如通过视觉获取的球与球洞的距离, 通过本体感觉获取的力量、 速度反馈等)相互整合, 相比只提供视觉与听觉信息的各组获得了更多从环境中检测可供性的机会, 进而强化了整合组的知觉动作技能。
3.2 动作预判与知觉信息整合对于提高高尔夫推杆成绩的影响
整合组在推杆开始前需要通过视觉观察上杆与送杆区间的位置, 获取相应的视觉信息, 这是一个感知静态可供性的过程, 例如被试需要结合自己的身高、 臂展和腿长等人体特征对推杆距离进行判断, 有研究表明个体完成动作的能力取决于他感知人体测量特征可供性的能力[20]。 同时,整合组在推杆过程中需要通过视觉、 听觉与本体感觉将个体的动态能力(力量、 灵活性与协调性等)与环境相互结合, 这是一个感知动态可供性的过程。 同样有研究表明, 个体感知动态可供性的能力会限制和影响他完成动作的能力[21]。 研究结果表明, 整合组在技能保持阶段推杆的准确性、 稳定性、 一致性均显著好于各组, 再次支持了假设1。 整合组在推杆练习过程中获得了更多的知觉信息, 通过实验设计将知觉信息与运动技能整合, 并促使整合组在保持阶段的推杆成绩显著优于各组。
通过数据还发现, 整合组在48h 后的保持阶段和72h 后的迁移阶段仅在推杆的一致性(BVE)显著高于各组, 虽然准确性(MRE)与稳定性(GRE)不存在统计学, 但是描述性统计学分析表明数据依然好于各组。 这与整合组被试的运动经验与运动时长过短有关, 知觉-运动技能训练更适合有一定专项基础的中、 高水平运动员[22], 他们的运动技能更多, 领会更深, 能够体现出一种高级的问题解决能力。 其次, 由于高尔夫推杆属于封闭环境下的动作执行, 推杆距离增加后, 青少年初学者在没有视觉和听觉反馈的情境下严重依赖本体感觉提供的反馈, 而青少年初学者没有足够的试错机会来依靠本体感觉作为反馈源进而控制动作。 有研究表明, 本体感觉对肢体协调和肌肉控制起着重要作用[23]。
此外, 值得注意的是, 视觉组在技能习得阶段推杆的准确性、 稳定性均显著好于预判组, 一致性虽然不存在显著差异, 但描述性统计分析表明视觉组依然好于预判组; 而在技能保持迁移阶段视觉组的3 项数据却差于预判组。 这一结果与Moradi 提出的关于习得阶段有获取视觉信息则视觉反馈在整个学习阶段(保持与迁移阶段), 是必不可少的感觉信息来源的结论相反[24]。 这是因为本体感觉反馈的加工过程被视觉反馈的加工过程所掩盖[25], 被试不但没有减少而是增加了对视觉反馈的依赖性[26], 而本体感觉会影响运动的稳定性、 一致性[27]。 实验结果证实了当视觉信息可用时, 本体感觉会减弱, 在推杆练习中过度依赖视觉信息提示会影响本体感觉形成肌肉记忆。 因此, 在进行高尔夫推杆技能学习时, 应该将知觉信息与技能学习整合, 增强肌肉记忆。
4 结论
研究结果表明: 1)动作预判与视觉信息整合在技能习得阶段与技能保持阶段对提高推杆成绩有显著影响; 在技能迁移阶段推杆准确性、 稳定性虽然不存在统计学意义, 但是描述性统计学分析依然好于各组。 2)动作预判与视觉信息整合促使知觉运动技能在高尔夫初学阶段形成。3)动作预判与视觉信息整合较依赖视觉信息的反馈, 对提高推杆成绩更有效, 在技能保持与迁移阶段视觉信息的反馈的依赖没有减少, 而是增加了。