基于改进CEEMDAN和t-SNE的故障特征提取方法
2023-11-09郑惠萍王卓彭立强秦志英赵月静裴春兴
郑惠萍,王卓,彭立强,秦志英,赵月静,裴春兴
(1.河北科技大学机械工程学院,河北石家庄 050018;2.中车唐山机车车辆有限公司,河北唐山 063000 )
0 前言
从振动信号中提取有效的故障特征是机械故障诊断的关键,特征提取的效果可以决定故障诊断的准确性[1]。由于大多数机械设备的振动信号具有非线性、非平稳性的特点,在特征提取上具有一定困难,如何提取到有效的故障特征成为目前研究的热点[2]。
小波变换具有很好的高低频信号处理能力,可用于处理非线性、非平稳信号,但是小波变换仍存在小波基选择困难等问题[3]。经验模态分解(Empirical Mode Decomposition,EMD)在处理非稳定信号上可以突出信号的局部特征,但是由于过分解及边界效应等原因,导致产生模态混叠和虚假分量[4]。局部均值分解(Local Mean Decomposition,LMD)在分解故障信号时存在模态混叠问题,分解得到的PF分量包含原始信号中不同尺度特征,导致故障特征提取困难[5]。自适应噪声完备集合经验模态分解(Complete Ensemble Empirical Mode Decomposition with Adaptive Noise,CEEMDAN)虽然有效地解决了EMD模态混叠问题,但仍存在过包络和欠包络现象[6]。
t-分布随机邻近嵌入(t-Distributed Stochastic Neighbor Embedding,t-SNE)算法是由VAN DER MAATEN、 HINTON[7]提出的一种基于概率分布的流形学习算法,可以有效实现高维数据的降维,对高维数据的处理具有优异的效果。王望望等[8]计算原始振动信号的时频域特征,构建高维特征数据集,再利用t-SNE充分发掘高维故障特征数据的局部特征信息,准确地提取了低维敏感特征。王双海等[9]采用MIGA-VMD分解振动信号,计算各IMF分量的排列熵组成特征向量,再利用t-SNE进行降维处理得到三维特征向量,取得很好的效果。
经上述分析,本文作者通过改进CEEMDAN分解振动信号,基于相关系数准则挑选出含故障信息多的有效IMF分量,计算有效分量的时域特征、频域特征、能量值和奇异值组成高维故障特征集,再结合t-SNE算法对高维特征降维处理得到低维敏感特征,最后通过实验验证所提方法的有效性。
1 改进的CEEMDAN方法
1.1 三次Hermite插值包络
三次Hermite插值相比于传统的三次样条插值法,能保持曲线的光滑性,若插值点的一阶导数选择合适,插值曲线就能保持单调,避免三次样条插值出现过包络、欠包络现象。
三次Hermite插值定义式[10]如下:对于数据(ai,bi,di),其中bi和di分别是ai处的函数值和一阶导数值,Δai、Δi、Δbi分别为
Δai=ai+1-ai,Δbi=bi+1-bi,Δi=Δbi/Δai
(1)
在a∈[ai,ai+1]内对于初值F(ai)=bi,F′(ai)=di给定的三次Hermite插值F(a)∈C[m,n]可定义为
(2)
1.2 三次Hermite插值法改进CEEMDAN
改进CEEMDAN是在CEEMDAN基础上提出的一种时频分析方法。CEEMDAN在EMD分解的基础上很大程度减少了模态混叠现象,且重构误差较小。但是CEEMDAN还存在一些不足,比如它延续EMD分解中求解包络线的方法[11]。改进CEEMDAN算法通过采用三次Hermite插值法构造包络线,有效解决了过包络和欠包络问题。除此之外,改进CEEMDAN算法在包络线构造中也借鉴了ITD基线构造方法[12],在相邻的2个极大(小)值之间插入极值对称点k,再利用三次Hermite插值生成包络线,使原始信号更多的信息传递到包络线中,大大提高了CEEMDAN的分解精度。
改进CEEMDAN算法步骤如下:
(1)原始信号为x(t),分解得到的模态分量为δIMF,a(a=1,2,3,…,A)。同时定义Ea表示由EMD分解得到的第a个模态分量,Di(i=1,2,3,…,l)为标准正态分布的白噪声。利用Hermite插值法对极大(小)值和插入的价值对称点形成上下包络线,对信号xi(t)=x(t)+Di分解得到第一个模态分量IMF1表达式
(3)
(2)从原始信号中除去IMF1计算第一个余量:
r1=x(t)-δIMF,1
(4)
(3)再对信号r1(t)+εE1(Di(t))进行分解,得到第2个分量IMF2表达式;
(5)
(4)对于a=1,2,3,…,A,先求出第a个余量ra(t),再算出第a+1个IMF模态分量表达式:
ra(t)=ra-1(t)-δIMF,a
(6)
(7)
(5)重复执行以上步骤,直到残差余量不适合分解停止,最终余量为RA(t)。原信号可以表示为
(8)
1.3 仿真分析
为直观地对比改进前后CEEMDAN处理非平稳信号的特点,构造仿真信号y=sin(2πf1t)+sin(2πf2t)+sin(2πf3t),其中f1=10 Hz,f2=20 Hz,f3=50 Hz;采样频率为1 000 Hz,采样时间为1 s。对仿真信号进行CEEMDAN分解和Hermite插值改进的CEEMDAN分解,得到的结果如图1、2所示。
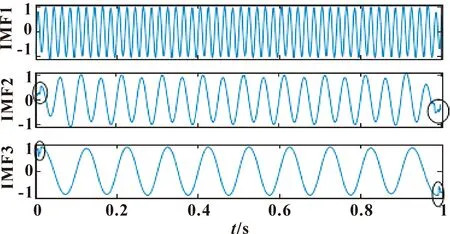
图1 仿真信号CEEMDAN分解结果
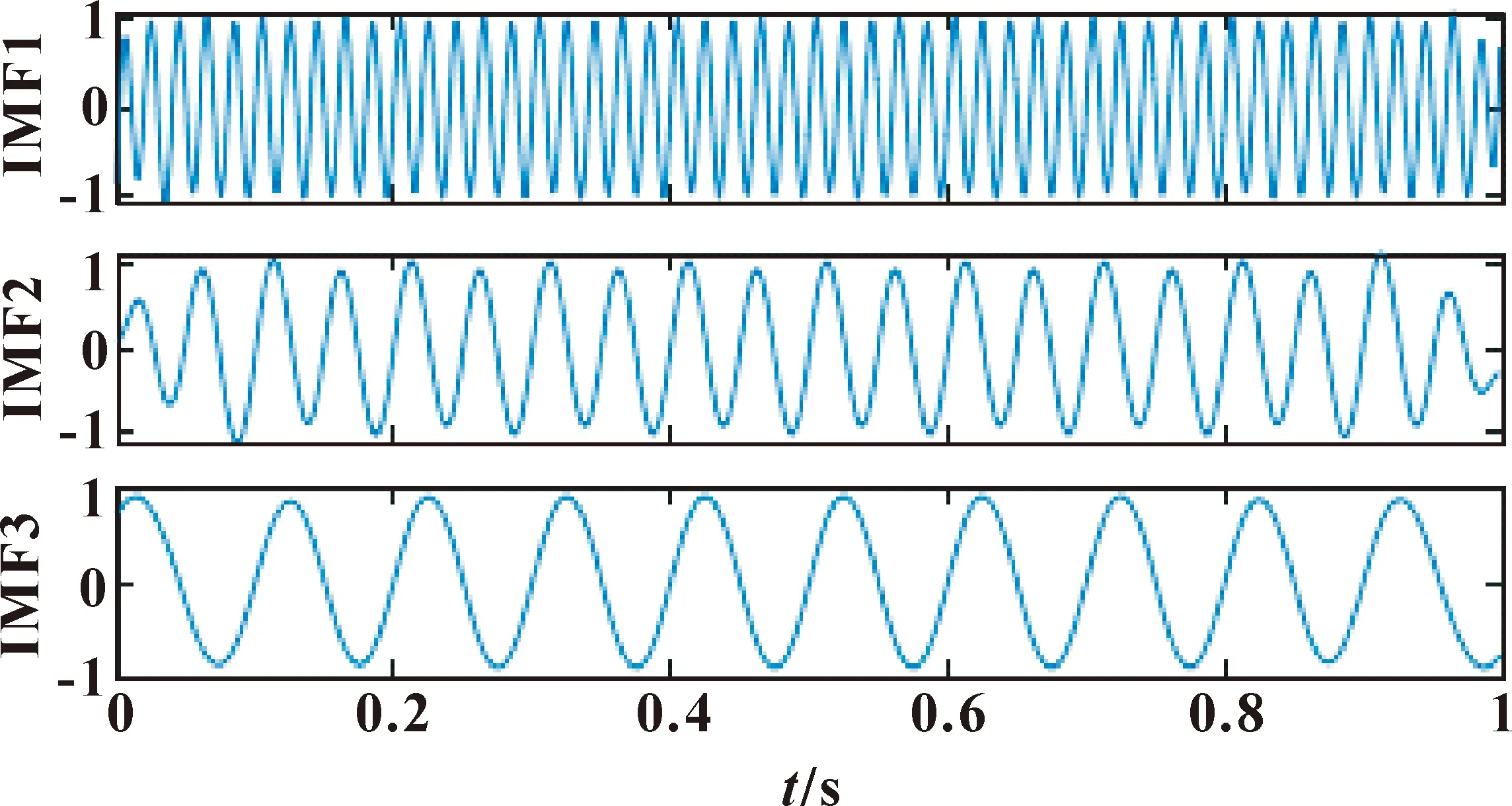
图2 仿真信号改进CEEMDAN分解结果
由2种方法分解仿真信号的结果可以看出:Hermite插值法改进后的CEEMDAN分解效果更好,能够有效地改善CEEMDAN端点附近存在的误差现象,使信号分解更精准。为了定量对比改进后的CEEMDAN和CEEMDAN分解效果,引入各IMF分量之间的正交性作为评价指标。理论上信号分解后得到的所有分量两两正交,但是由于迭代误差造成正交指标近似为0,所以可由正交性均值IO来评价分解效果,正交性均值IO计算公式如下:
(9)
其中:T为原始信号长度;X(t)为原始信号;j≠k。
最终由公式(9)计算得到传统CEEMDAN对仿真信号处理得到的δIO值为0.031,改进后的CEEMDAN对仿真信号处理得到的δIO值为0.025,证明了改进CEEMDAN的分解效果更好。
2 混合域特征构建
2.1 时域和频域特征
在振动信号特征提取中,时域和频域特征分析属于最简单、基础的分析方法,同时部分机械故障也可以由时域频域特征表现[13]。由改进CEEMDAN分解后得到的IMF分量比原始信号包含更加清晰、准确的故障信息。因此,对每个有效IMF分量提取6个时域特征和2个频域特征构建时频域混合特征S=[S1,S2,…,Si],Si表示改进CEEMDAN分解得到的第I个IMF分量。所选时域特征如表1所示,频域特征如表2所示。其中:x(n)是时域信号序列,n=1,2,…,N,N为样本点数;x(k)是x(n)的频谱,k=1,2,…,K,K是谱线数;fk是第k条谱线的频率值。

表1 时域特征表达式
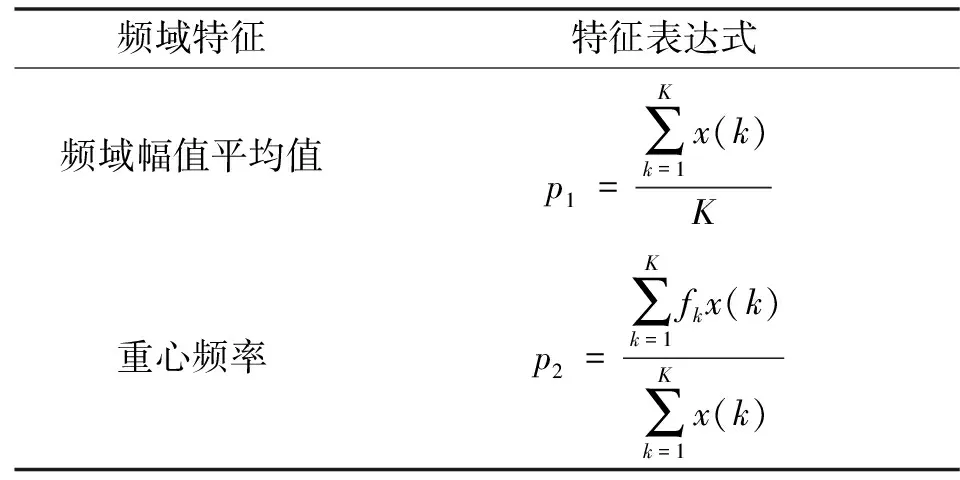
表2 频域特征表达式
2.2 奇异值和能量值特征
奇异值分解在振动信号特征提取中被广泛应用,奇异值作为矩阵固有的特征,能表现出矩阵中所包含的信息。除此之外奇异值具有良好的稳定性,在采样时间内振动信号各频段的特征可以由不同IMF分量的奇异值反映出[14]。因此,采用改进的CEEMDAN对振动信号分解后得到的IMF分量进行奇异值分解,得到的奇异值能够表现出机械设备的状态。计算各阶IMF分量的奇异值为σ=[σ1,σ2,…,σi]。其中i为IMF分量个数。
能量特征是振动信号的重要特征,不同状态下设备的运行状况可以由能量值准确地反映出来。当发生不同故障时,振动信号的频率成分和各频段内信号的幅值能量都会发生改变。基于改进的CEEMDAN对振动信号分解得到IMF分量,其能量分布特征可以在一定程度上表征机械设备的运行状态。计算各IMF分量|ci(t)|幅值能量Ei:

(10)
综上分析,时域和频域特征、奇异值特征、能量特征都能从一方面表现机械设备的故障特征,所以结合3种特征建立高维混合域特征:G=[Si,σi,Ei]。混合域特征可以实现对故障信息的全面表征,从而为故障诊断提供更充分的特征。
3 t-SNE算法
t-SNE作为一种无监督非线性流形学习算法,可以充分地将低维敏感特征信息从高维数据中提取出来,从而实现数据的降维和二次特征提取。它采用条件概率分布思想对原始高维数据和嵌入空间低维数据进行建模,将高维数据映射到低维数据并且尽可能地保证分布概率不变。具体步骤[15]如下:
(1)设高维空间中含有n个数据样本,表示为{x1,x2,…,xn},高维空间中数据点xi、xj相似的条件概率可以表示为
(11)
其中:σi是以数据点xi为中心的高斯分布差。
(2)计算高维空间中联合分布概率Pij:
(12)
(3)设低维空间中的数据点为{y1,y2,…,yn},利用自由度为1的t分布计算在低维空间中样本概率密度qij:
(13)
(4)采用KL散度表示低维空间概率分布Q和低维空间概率分布P之间的相似度为
(14)
(5)为了获取最佳的低维嵌入数据yi,利用梯度下降算法进行优化,得到最小KL散度表达式:
(15)
由以上步骤得到降维后的结果{y1,y2,…,yn},同时可以进行多次迭代运算,来提升低维空间点的准确性。
4 基于改进CEEMDAN和t-SNE的故障特征提取流程
考虑机械设备振动信号非平稳特性,通过改进后的CEEMDAN对原始振动信号分解,得到若干个IMF分量,根据相关系数准则挑选出含有故障信息多的有效IMF分量。从有效IMF分量中提取反映故障的特征,构建高维混合域特征集来充分表征设备的状况。通过t-SNE方法对高维混合域特征进行降维、二次特征提取,使混合域特征成为更易被识别的低维特征向量,最后采用支持向量机对该方法提取的特征进行分类。具体的流程如图3所示。
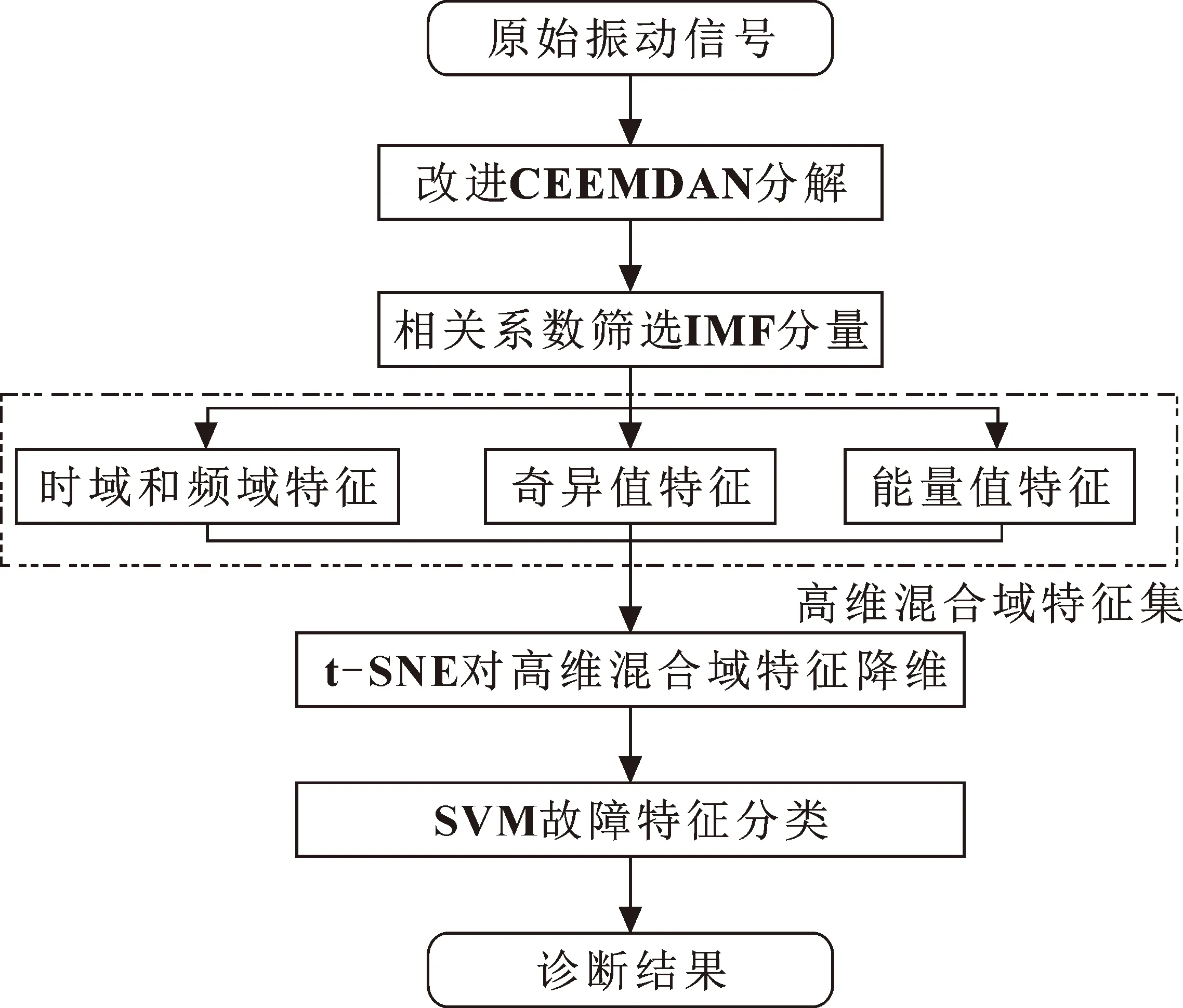
图3 改进CEEMDAN和t-SNE的故障特征提取流程
具体步骤如下:
(1)通过三次Hermite插值法改进CEEMDAN;
(2)采用改进的CEEMDAN对原始信号分解,并根据相关系数准则挑选出包含故障信息多的有效IMF分量;
(3)计算每个有效IMF分量的时域频域特征、能量值特征和奇异值特征,构建高维混合域特征;
(4)采用t-SNE算法对高维的混合域特征进行降维处理,得到低维敏感特征;
(5)把低维特征集输入到SVM进行分类识别,根据结果判断该方法特征提取的效果。
5 实验验证
5.1 实验数据采集
为验证所提特征提取方法的有效性,在QPZZ-II型实验台上分别模拟了齿面磨损和齿根裂痕故障,故障齿轮如图4所示。

图4 两种故障齿轮
振动信号通过安装在齿轮箱靠近故障齿轮外壳的加速度传感器采集。加速度传感器的安装位置如图5所示。电机转速为1 400 r/min,采样频率为6 600 Hz,采样点数为1 600。采集正常工况、齿面磨损故障、齿根裂痕故障3种状态下各40组数据。随机从每种故障类型的40组数据中选出20组作为SVM的训练样本,其余20组作为测试样本。

图5 加速度传感器位置选择
5.2 故障特征提取
首先,通过改进CEEMDAN分解3种状态下的振动信号得到多个IMF分量。以齿根裂痕故障信号为例,对齿根裂痕故障振动信号分解得到9个IMF分量,如图6所示。

图6 齿根裂痕故障信号分解结果
由公式(9)计算齿根裂痕、齿面磨损和正常3种工况的IO值如表3所示。可见:改进的CEEMDAN处理拥有更低的δIO值,对3种工况下振动信号处理效果更好。
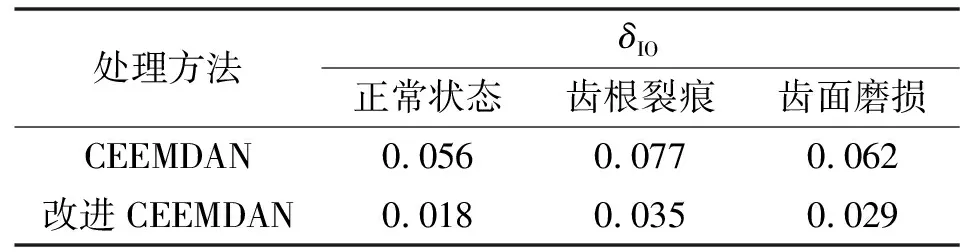
表3 两种算法分解得到的正交性均值
分解过程中受到所加白噪声与迭代次数的影响,得到的IMF分量中存在伪分量。为了挑选出能够反映故障信息的有效IMF分量来提取到明显的故障特征,采用相关系数分析各IMF分量和原始信号的相关程度。3种状态下各IMF分量与原始信号的相关系数如图7所示。可知:IMF1-IMF4相关系数明显大于其余分量,所以选取前4个IMF分量作为有效分量,计算其时域频域特征、奇异值和能量值构建高维混合域特征。

图7 各IMF分量相关系数
采用t-SNE算法将32维混合域特征集进行降维处理得到3维特征向量,为了验证t-SNE算法的降维效果,同时采用ISOMAP、LLE和t-SNE 3种方法进行降维处理,结果如图8所示。
由图8可以看出:t-SNE算法对多维特征进行降维处理后,3种数据样本分类清晰,同种故障下的样本点能够聚集在一起,不同故障状态下的样本数据在低维空间距离较远。相较于其他2种方法具有明显的优势,能够很好地满足特征稳定性的需求。
5.3 故障分类
为验证特征提取方法的有效性,将60组训练样本输入到SVM分类器中进行训练,得到用于故障诊断的SVM模型。再将剩余60组测试样本通过训练好的SVM模型进行分类处理,测试样本分类结果如图9所示。其中,SVM的核函数选择RBF核函数。齿轮故障对应的SVM标签为:1代表齿面磨损故障,2代表齿根裂痕故障,3代表正常状态。由图9可以看出:采用改进CEEMDAN和t-SNE结合的故障特征提取方法,对齿轮箱的故障诊断准确率可以达到98.3%。

图9 SVM测试集分类结果
5.4 方法对比
选用与上述同样的样本数据,分别采用EMD、CEEMDAN和改进CEEMDAN进行信号分解,提取有效IMF分量时域频域特征、奇异值和能量值构建高维特征向量,并通过t-SNE降维处理得到低维特征向量训练SVM模型,用训练好的SVM模型对测试样本分类,诊断结果如表4所示。

表4 不同特征提取方法的诊断准确率
5.5 变工况下特征提取能力分析
由于大多数机械设备在实际工作时通常工况是变化的,转速的变化在信号特征引起的反应与故障所造成的特征变化比较相似,使得特征提取更加困难。为证明基于改进CEEMDAN和t-SNE的特征提取方法在变工况条件下也具有有效性,进行以下实验分析。在QPZZ-II型实验台上采集正常齿轮、齿面磨损故障、齿根裂痕故障在电机转速为1 200、1 000、800 r/min状态下的振动信号。对同一故障、不同工况下的故障信号按图3流程进行处理,各种故障信号通过改进CEEMDAN和t-SNE方法提取的3维特征如图10所示。其中,工况1代表电机转速为1 200 r/min,工况2代表电机转速为1 000 r/min,工况3代表电机转速为800 r/min。
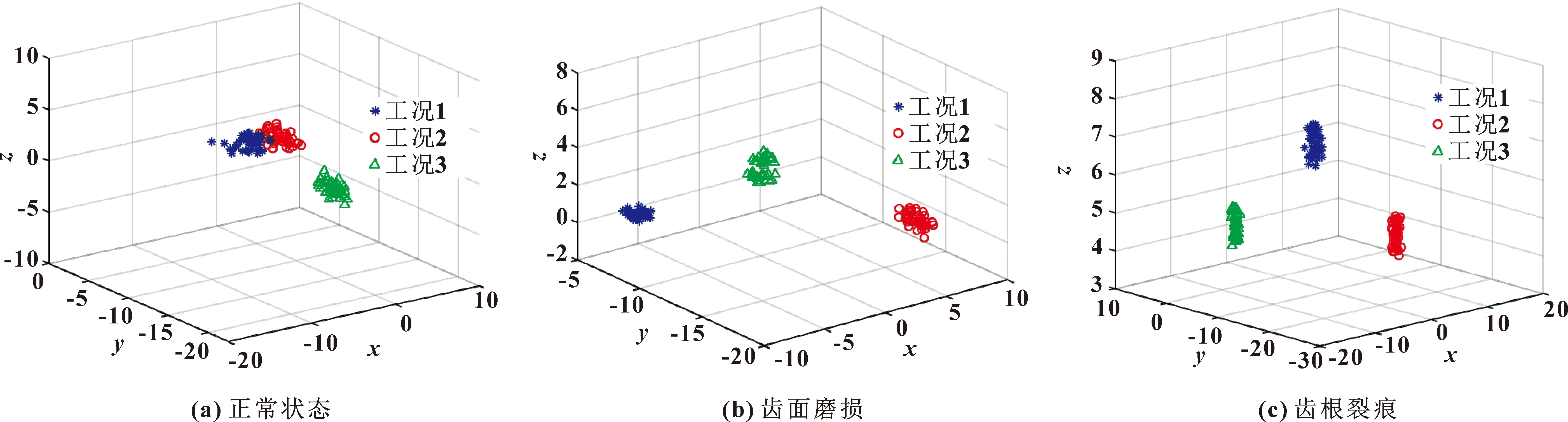
图10 变工况下改进CEEMDAN和t-SNE特征提取结果
从图10可以看出:齿轮箱在正常状态、齿面磨损故障和齿根裂痕故障同种工况下的样本点能够聚集在一起,不同工况下的样本数据在低维空间距离较远。说明基于改进CEEMDAN和t-SNE的特征提取方法能够有效获取变工况下齿轮箱故障振动信号的特征,验证了该方法特征提取能力的优越性。采用SVM对齿轮箱4种工况下提取到的特征进行分类识别,各种故障分类准确率如表5所示。
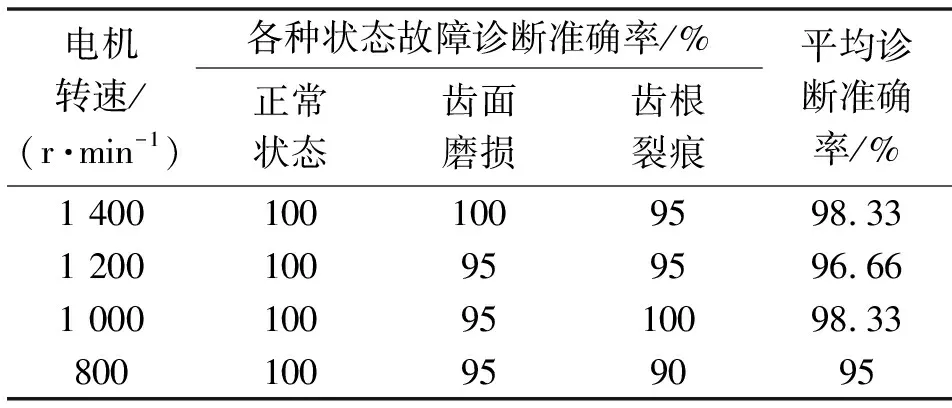
表5 不同转速下SVM故障诊断结果
由表5可知:在不同电机转速情况下SVM故障诊断平均准确率都在95%以上,进一步证明文中方法不仅能够对稳定工况下不同故障的特征进行有效提取,也能实现变工况条件下故障特征的准确提取。实验结果证明了所提出的改进CEEMDAN和t-SNE特征提取方法具有广泛适用性。
6 结论
文中提出了一种基于改进CEEMDAN和t-SNE的故障特征提取方法。通过Hermite插值法构造包络线改进CEEMDAN解决了传统方法的过包络和欠包络问题,利用改进CEEMDAN对振动信号分解并通过相关系数准则筛选出有效分量,提取有效IMF分量的时域频域特征、奇异值特征和能量值特征构建高维特征向量,再由t-SNE对高维特征向量降维得到低维特征向量。通过齿轮箱故障模拟实验台进行验证,实验结果表明:该特征提取方法在同类特征聚集、类间间距以及故障诊断的准确率上都优于其他传统方法。同时该方法在变工况条件下也能够提取到有效的特征,为振动信号故障特征提取提供了新思路。
