一种超声切割装置的设计及碳纤维复合材料切割研究
2023-11-06李恒锋王安斌
李恒锋,何 宇,翁 琳,王安斌
( 上海工程技术大学城市轨道交通学院,上海 201620 )
碳纤维复合材料的机械加工方式大致可分成传统加工与非传统加工两类。 传统机械加工方式主要有钻孔、铣削、车削、水柱切削和激光切割等[1]。 侯荣生[2]对碳纤维复合材料的回转类高速数控钻磨机床进行了研究;张万君等[3]对碳纤维复合材料钻具的工艺研究、研磨方法、钻具选择的工艺参数等方面进行了深入探讨;胡宝刚等[4]研究了碳纤维复合材料的切削加工装备, 对各种切削刀具的材料、刃型、工艺参数等进行了探讨;孙路华等[5]针对碳纤维复合材料高速钻孔中刀具、转速、进给量、钻孔个数等因素对轴向力的影响进行了系统分析; 鲍永杰[6]开发了一种用于碳纤维复合材料的新型切割工具,并对其加工机制进行了探讨。
传统切削方法仅依靠拉、滚或刀具之间的相互往复移动来切断工件的物料, 通常切削效果不佳。超声切削技术是利用超声波换能器前端变幅杆的超声波振动来实现切削[7]。 与常规切削技术相比,超声切削技术具有以下优点: ①大幅度降低切割力、降低切割温度,使处理效果大幅提升;②刀具磨损少,刀具使用时间更长;③切割质量优良,刀具表面光滑平整,减少切口、毛刺、粘刀等缺陷;④可切割各种常规工艺不能处理的碳纤维、玻璃纤维及各种蜂窝材料;⑤切割时噪音低,无尘埃,降低对作业场所环境的污染[8]。
对于碳纤维、玻璃纤维、蜂窝材料和硬脆性材料的加工,超声切削技术能实现更高的加工效率和加工精度。 由于碳纤维复合材料在轨道交通车辆制造领域具有广阔应用前景,但在采用传统工艺加工时易产生毛刺、 撕裂等缺陷并影响车辆产品质量,本文设计了一种超声切割装置,并开展了碳纤维复合材料层合板的超声切割仿真,以验证其可行性。
1 超声切割装置设计
本文设计的超声切割装置主要由换能器、变幅杆和刀具组成。 其中,换能器的材料选用铝合金,变幅杆的材料选用不锈钢;超声切割刀具的材料选用金刚石,并采用直刃刀具。 直刃刀具通常由刀片、刀柄、刀盖三部分组成,其工作方式是沿着特定的路线以及特定的角度对工件进行切割,通过螺栓将刀片紧固在刀柄上,并且接收经过变幅杆放大之后的机械振动。 刀片的刃角α 为46.74°。 图1 为超声切割装置部件及装配体模型示意图。
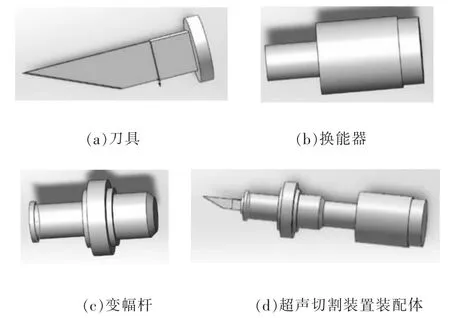
图1 超声切割装置部件及装配体模型
超声切割装置能以最小的功耗来实现刀具的最优振动效果。本文使用ABAQUS 软件进行有限元分析。 超声切割装置中不锈钢变幅杆的材料性能参数如下:密度为7 750 kg/m3、杨氏模量为193 GPa、泊松比为0.31。 在实际加工过程中,超声切割装置是通过变幅杆上的法兰盘固定在夹具上。 为使有限元分析的结果更接近于实际加工情况,本文设计的整个超声切割装置是通过变幅杆上的法兰盘以及换能器的底座来固定, 需令这两处位置上的U1、U2和U3三个方向的偏移为零以及UR1、UR2和UR3三个方向的转动偏移为零,并将网格的单元类型设置为C3D4。 随后,提交作业即可得到该装置的30 阶次的固有频率和振型(表1)。
从表1 可看出, 第1~14 阶的固有频率以及第23~30 阶的固有频率都不满足超声波发生器输出20 000 Hz 的要求, 因此只需比较第15~22 阶的振型云图即可。 第15 阶到第22 阶的云图见图2。
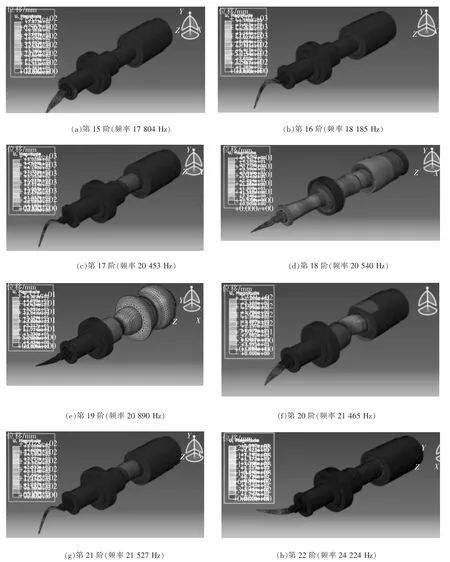
图2 超声切割装置各阶次振型云图
此外从表1 还可看出, 第18 阶次的固有频率为20 540 Hz, 能实现整个装置与超声波发生器的匹配,还因其只在轴向产生变形,可降低信号在传输过程中的损耗。 因此,从固有频率上看,本文设计的超声切割装置满足要求。 就超声切割装置的振动而言, 要求的是整体结构仅在轴向上发生偏移,其他方向则很少发生偏移,并且刀片上的振动幅度应该更大,这样有利于超声切割加工。 由图2 可知,本文所设计的超声切割装置仅在第18 阶次时产生了轴向位移且几乎没有在其他方向上产生振动,因此第18 阶次的振型满足设计要求。
2 碳纤维复合材料超声切割过程仿真
本文对尺寸25 mm×25 mm 的碳纤维复合材料层合板进行切割仿真,以此模拟实际中的碳纤维复合材料层合板超声切割。仿真试验以Hashin 失效准则作为评估材料失效发生的依据。 仿真试验时,设置碳纤维复合材料层合板的基本特征为三维、可变性和实体, 再通过拉伸方式进行集合元素的拆分,由此可得到8 层厚度相等的实体部件。 所创建层合板的材料相关参数见表2。
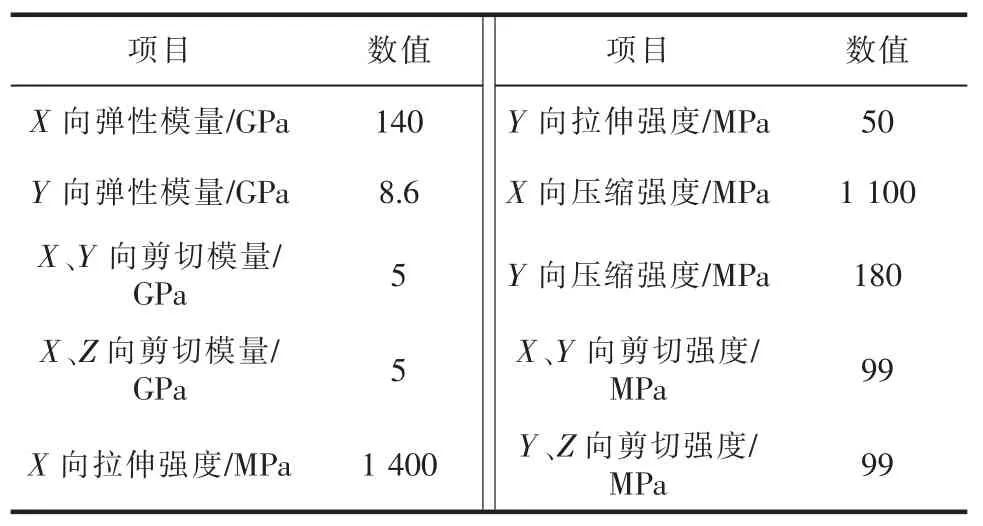
表2 层合板材料参数
在仿真软件中创建碳纤维复合材料层合板时,在对话框中选择层数为8 层,选择单元类型为连续壳。 由于单向铺层的碳纤维层合板在0°和90°时分别能取到最大刚度和最小刚度,为消除仿真过程中出现的耦合现象, 采用中心对称方式进行铺层,并按照0°、90°、45°、-45°、-45°、45°、90°、0°的顺序进行铺层设置。 每一层的堆叠效果见图3。
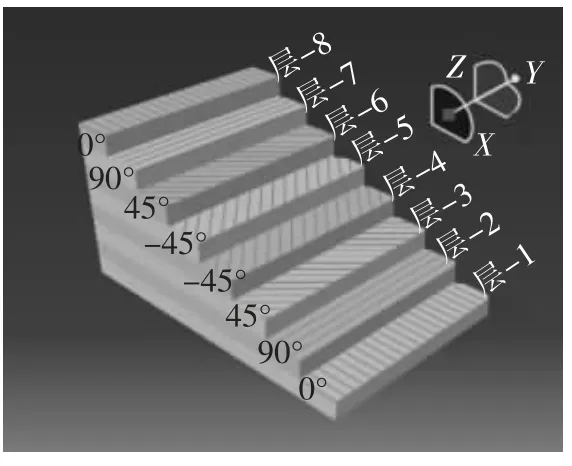
图3 层合板铺层截面图
刀具和材料的装配关系见图4。 在创建分析步时,选择通用的动力、显示分析步,并设置分析时间为0.05 s。 打开“场输出管理器”,创建场输出“FOutput-1”,将作用区域设置成整个模型,设置间隔为20 s, 并且在输出变量项目中选择Mises 等效应力、纤维受拉破坏、纤维受压破坏、基体拉伸损伤、基体压缩损伤、剪切损伤、损伤初始准则以及输出状态等。 在设置刀具与层合板的相互作用之前,必须对刀具添加一个刚体的约束。 点击程序模块创建刚体约束,在体单元中选中整个刀具并在刀具外新建参考点RP-1,如图5 所示,将整个单据单元耦合至该参考点上。 由于整个超声切割过程建立在刀具与碳纤维复合材料层合板的接触关系上,需创建二者相互接触的属性,并且在接触属性选项中添加切向行为、法向行为和几何属性信息,其中将切向行为中的摩擦公式设置为“罚”。

图4 刀具和材料装配关系示意图

图5 刚体约束参考点位置示意
由于分析过程涉及表面与表面接触的相互作用类型,必须先定义刀具和碳纤维层合板相互接触的区域。 在工具中选择“表面管理器”,创建一个刀具的面集合;考虑到计算效率和耗时等因素,在创建层合板的点集合时, 无需选中整个层合板区域,只需在工具中选中“集管理器”并创建层合板实际接触区域的点集合;选中上述两个集合即可创建表面与表面接触“Int-1”,所定义的接触区域见图6。
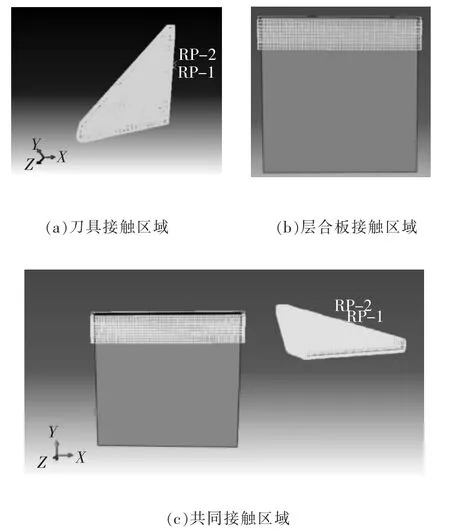
图6 刀具与层合板接触区域
下一步,在软件中点击“载荷模块”,给刀具和碳纤维复合层合板创建边界条件。 首先,在层合板底部的节点创建一个名为“Set-Fix”的结点集合,接着新建一个名为“BC-Fix”的层合板的边界条件,在弹出的对话框中选择力学类别中的“对称/反对称/完全固定”的分析步类型,并选择要施加的区域为“Set-Fix”的区域,令其在U1、U2、U3的三个方向位移为零,以及在UR1、UR2、UR3三个方向的旋转位移为零,这样可将层合板完全固定。
另外,在边界条件管理器中创建刀具的边界条件。 首先,由于超声切割中的刀具振动是通过一个振动频率为20 000 Hz 的振荡信号控制, 需在工具中新建一个幅值“Amp-1”,选择类型“周期”。周期型幅值曲线的表达式为:
式中:N 为傅里叶级数的个数;ω 为圆频率,rad/s;t0为起始时刻;A0为初始幅值,mm;A、B 分别为cos项、sin 项的系数。
接着,设置圆频率为125 664 rad/s、初始幅值为0.5 mm,同时在对话框的A、B 处分别输入系数0 和0.5。 然后,创建刀具Z 方向的边界条件“BC-Z”,选择力学类别中的“位移/转角”,将作用区域设置在参考点RP-1 上,在U3的对话框中输入“1”,并选择创建好的幅值“Amp-1”;创建刀具主进给方向即X 方向的边界条件“BC-X”,在力学类别中选择“速度/角速度”分析类型,同时仍然将作用区域设置在参考点RP-1 上,分别勾选V1、V2、VR1、VR2、VR3,并设置V1的值为-650 mm/s。
对于碳纤维复合材料层合板的网格划分,本文考虑到计算精度和计算效率,在指派单元类型时选择指派Explicit 库中连续壳的线性六面体, 也就是“四边形八结点”平面内的通用连续壳(SC8R),这是因为碳纤维复合材料的Hashin 失效准则只对壳单元生效,并且该壳单元还能实现缩小和沙漏控制的功能,可以提高网格划分的质量;在单元控制属性中选用二阶精度,设置沙漏控制方法为增强,并使用单元删除。 在网格的属性管理中,选择单元形状为六面体形,并采用进阶算法中的扫掠技术。
对于刀具的网格划分,给网格单元指派Explicit库中的 “三维应力族十结点修正二次四面体单元”(C3D10M), 设置网格属性为默认算法中的自由计算,选择单元的形状为四面体,在作业提交以及经后处理后,就得到刀具切割碳纤维层合板的切削过程及层合板上应力变化的云图、各层纤维的损伤情况等信息。
为探究影响碳纤维复合材料切割时最大应力的因素,本文通过改变X 方向上的进给速度以及改变刀具刃角α 的角度来展开研究。 通过改变载荷边界条件“BC-X”的数值来比较相应的应力云图所示最大应力,将其分别设置为-550、-500、-450、-400、-350 mm/s,得到的结果见图7。可知,随着进给速度减小,碳纤维复合材料层合板的应力也减小,因此在实际加工中不宜采用较大的进给速度来切割碳纤维复合材料。 在此基础上, 分别设置刀具刃角α为56.74°、51.74°、46.74°、41.74°、36.74°,可以得到5组不同刃角的刀具。改变刀具的刃角α,使刀具在进行切割时与层合板接触的面积不一致,以此研究刃角α 对切割时层合板上最大应力的影响,得到的仿真结果见图8。 可以看出,在相同进给速度条件下,刃角α 越小,刀具在切削时与碳纤维层合板的接触面积越大,则层合板的最大应力也越大,因此在实际切割中所选刀具的刃角不宜太小,以避免产生过大的应力,进而影响超声切割的质量。
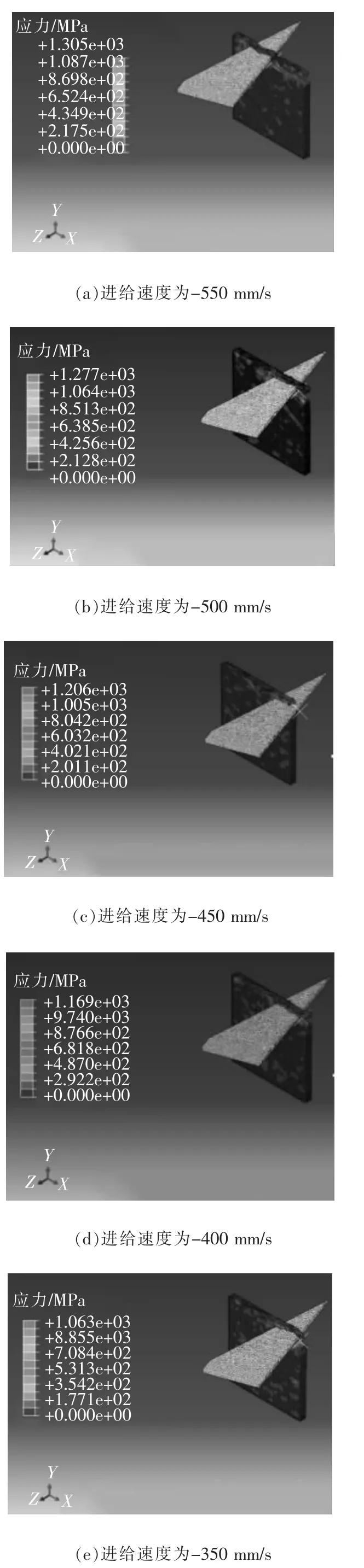
图7 不同进给速度下层合板应力云图
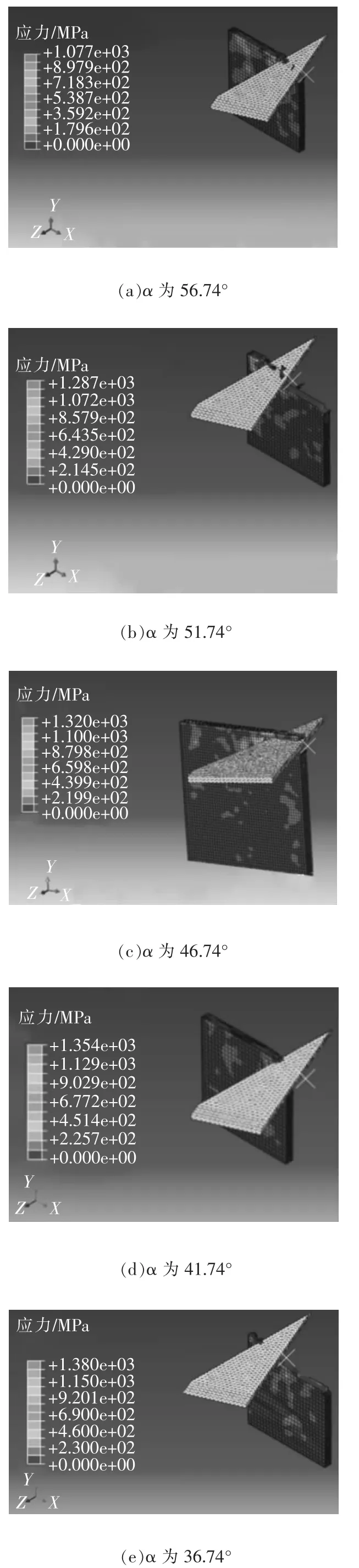
图8 不同刃角α 时切割层合板应力云图
3 总结
本文针对碳纤维复合材料的加工问题,设计了一种超声切割机构,并以此开展了碳纤维复合材料层合板的超声切割仿真研究,得出了以下结论:
(1)对设计的超声切割装置进行有限元分析,结果表明:在第18 阶次固有频率为20 540Hz 时,刀具上的位移达到最大值,并且变幅杆上的法兰盘和换能器的底座几乎不产生位移,这对于实际切割过程中的切割装置固定非常有利,从而验证了整个超声切割装置的合理性。
(2)开展了碳纤维复合材料的超声切割仿真研究,在不同进给速度、不同刀具刃角条件下分别进行切割仿真试验,得到了切割过程中的碳纤维复合材料应力分布情况,结果表明:进给速度的减小以及刀具刃角的增大,都能有效地减小切割过程中碳纤维复合材料的最大应力,这对于实际加工具有指导意义。
