共轴对转螺旋桨气动与噪声特性研究进展
2023-11-05刘沛清吕昌昊胡天翔屈秋林孙韬
刘沛清,吕昌昊,胡天翔,屈秋林,耿 欣,孙韬
(北京航空航天大学 航空气动声学工信部重点实验室,北京 100191)
0 引言
螺旋桨作为飞机最初始的动力装置,在历史进程中得到了长足而深入的发展。虽然20 世纪50 年代后大量飞机改用涡喷或涡扇发动机,但是由于螺旋桨具有推进效率高且短距起降性能好等优点,目前世界上仍有许多中大型运输机采用螺旋桨推进装置[1]。例如,美国的C-130 飞机[2]就是一款采用典型螺旋桨驱动的中大型运输机(图1a)。该机由美国洛克希德·马丁公司研发,其中C-130J 最大起飞重量可达70 T、巡航马赫数可达0.6。由于运输效率高等优点,C-130成为了美国最成功、最长寿的运输机。自1956 年投入服役以后,C-130 历经不断改型和升级,目前仍被广泛应用于空中运输、空中救援以及气象观测等领域。A400M[3]是另一极具盛名的螺旋桨运输机(图1b),其是欧洲空中客车公司(AMC)为比利时、法国、德国、意大利、葡萄牙、西班牙、土耳其和英国等欧洲国家研制的中远程战术运输机,用于在21 世纪取代日益老化的C-130 和C-160 等运输机。A400M 最大起飞重量可达130 T,巡航马赫数高达0.72,飞行航程可达6 500 km,其搭载的4 台EPI TP400-D6 涡桨发动机提供了足够动力。

图1 螺旋桨飞机Fig.1 Propeller aircraft
相较于单排螺旋桨,共轴对转螺旋桨具有起飞拉力大、巡航效率高的优点。所谓共轴对转螺旋桨,是指绕相同旋转轴旋转、但旋转方向相反的两个单排螺旋桨组成的螺旋桨[4]。这两个螺旋桨可以具有相同的几何参数或桨叶形状等,也可以根据气动性能需求,使用不同的几何参数或桨叶形状。在共轴对转螺旋桨系统中,后桨完全处于前桨产生的滑流中,其气动性能受到前桨的直接影响。与此同时,由于前桨与后桨距离较近,前桨气动性能必然也会受到后桨诱导的影响。共轴对转螺旋桨前、后桨之间存在的这种强烈的气动非线性干扰,以及这种干扰带来的前、后桨气动性能差异,就是共轴对转螺旋桨与单排螺旋桨的主要区别。早在20 世纪三四十年代,人们就在单排螺旋桨的基础上,开展了大量关于共轴对转螺旋桨的研究。其中,苏联图波列夫飞机设计局研制的图-95战略轰炸机(图2a)和图-114 远程运输机(图2b)就是其中的典型代表,他们具有高升限、低油耗和长航时等优点[1]。

图2 共轴对转螺旋桨飞机Fig.2 Counter rotating propeller aircraft
当飞机飞行速度较高时,螺旋桨桨尖容易产生激波,导致螺旋桨的推进效率大幅降低。因此螺旋桨飞机的飞行速度通常在马赫数0.60 以下,巡航马赫数较低始终是螺旋桨飞机的主要缺点之一。为了解决这一问题,1975 年,美国在先进螺旋桨的系列研究中首次提出了一种先进高速高效螺旋桨的概念[5]。先进高速螺旋桨的特点是桨叶较薄[6],并且采用后掠或者前掠来降低螺旋桨叶素的相对入流速度[7]。由于这种螺旋桨的布局和桨叶外形介于传统螺旋桨和风扇之间,因此先进高速螺旋桨也常被称为桨扇。共轴对转螺旋桨就是在先进螺旋桨研究中,为了在螺旋桨直径不变的情况下吸收更大的功率而提出的。这种设计理念在一定程度上相当于增加了桨叶数量,后排桨通过反转回收了前排桨的旋转动能,从而提高了整个螺旋桨系统的推进效率。在目前已有的飞行器中,乌克兰安东诺夫科学技术综合体研制的安-70 军用运输机(图3a)是唯一使用了共轴对转桨扇作为推进系统的螺旋桨运输机。安-70 飞机安装了4 台D-27 型桨扇发动机,每台发动机带一副共轴对转螺旋桨(前排8 片桨叶,后排6 片桨叶)。安-70 飞机能以马赫数0.70~0.72 高速巡航,巡航时螺旋桨推进效率仍达到80%以上。近些年由于燃油价格以及环境标准的提升,欧洲对共轴对转开式转子投入了大量研究[8]。最新预研的空客AI-PX7 开式转子发动机[9](图3b)将作为下一代空客中大型运输(客)机推进系统的竞争方案。

图3 高速共轴对转桨Fig.3 High-speed counter rotating propellers
虽然共轴对转螺旋桨具有气动效率高的优势,然而其前、后桨间存在强烈的非线性干扰。大量试验表明:由于后桨处于前桨的滑流中,前桨的桨尖涡以及从前桨桨叶拖出的螺旋型尾迹撞击在后桨叶片上,会对后桨产生强烈的非定常脉动载荷;另外,前桨处于高速旋转的后桨前方,因此会受到后桨叶片旋转诱导的非定常势流作用。以上两种非定常、非线性相互干扰作用,导致共轴对转螺旋桨的气动及噪声机理非常复杂。苏联在共轴对转螺旋桨的研究中具有一定的领先优势,已经成功研发出搭载共轴对转螺旋桨发动机的An-70 及图-95 机型。出于对燃油价格的考虑,美国的NASA 联合通用电气公司(GE),对共轴对转螺旋桨进行了一系列研究探索,但是随着燃油价格的下跌,最终并未真正实现共轴对转螺旋桨发动机的开发。由此可见,共轴对转螺旋桨的研究整体较为缓慢,同时出于保密的原因,各国对外公布的研究成果较少。相较这些国家的科研机构,我国的螺旋桨研究主要集中在单排螺旋桨上,而对共轴对转螺旋桨的研究起步较晚,研究成果也相对较少。本文主要针对国内外共轴对转螺旋桨试验研究、气动设计、高精数值模拟以及气动噪声的研究发展进行综述。
1 共轴对转螺旋桨的气动力及气动噪声试验研究
1.1 气动力试验研究
20 世纪40 年代起就已经开展了共轴对转螺旋桨气动特性研究,当时的研究以风洞测力试验为主[10-13]。1942 年,NASA 的Biermann等[10]进行了风洞试验(图4),证实了无论是否考虑机翼的影响,共轴对转螺旋桨的整体平均效率可比单排螺旋桨的提升3%~16%(图5)。
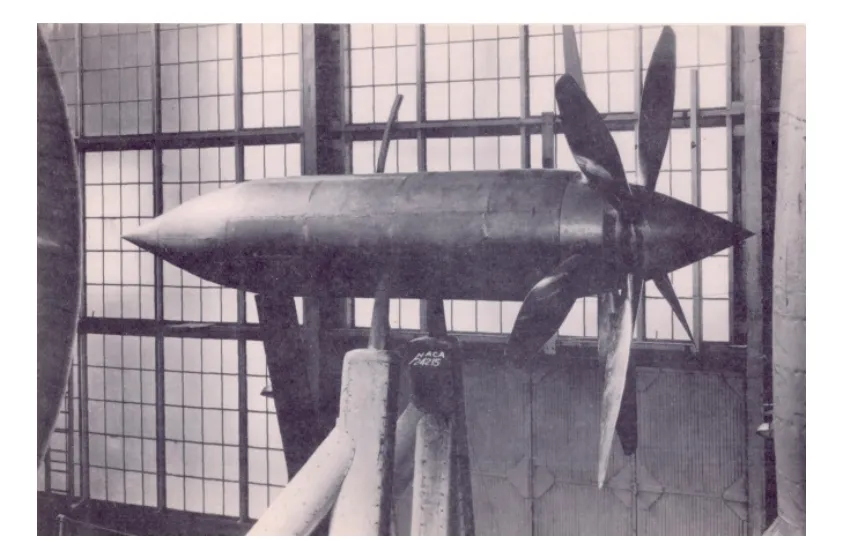
图4 NASA 早期共轴对转桨测力试验装置[10]Fig.4 CROPs experimental rig in NASA [10]
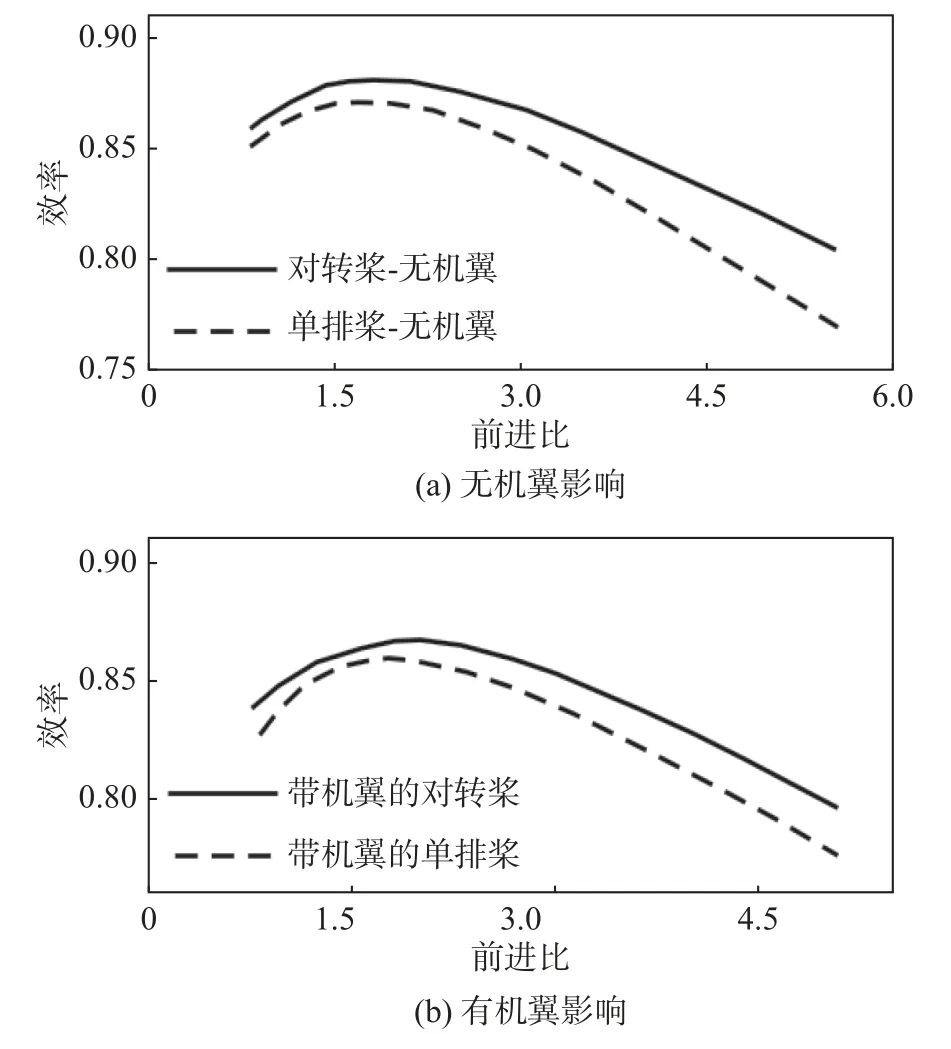
图5 共轴对转螺旋桨与单排螺旋桨气动效率的试验对比[10]Fig.5 Comparison of efficiency between CROPs and single propeller [10]
虽然共轴对转螺旋桨的气动效率较高,但是更多、更复杂的前后桨叶搭配使其气动设计变得十分困难。为了探索桨叶参数组合对其气动效率的影响,NASA 的Gray[11]对共轴对转螺旋桨的桨叶数量搭配、桨距角、前、后桨转速等参数变化产生的影响进行了试验研究,发现当桨距角β在一定范围内变化时,共轴对转螺旋桨的推进效率可以通过调整转速来维持在相近水平(图6)。
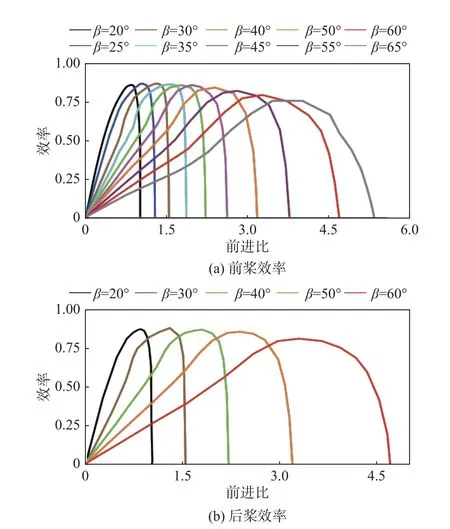
图6 共轴对转螺旋桨前、后桨推进效率随安装角的变化[11]Fig.6 Efficiency variations of front and rear propellers with the install angle [11]
前、后桨安装位置上的桨间距离,是共轴对转螺旋桨的另外一个重要参数。前桨和后桨之间的距离改变会直接影响对转桨桨间干扰作用,从而对共轴对转螺旋桨的气动特性产生明显影响。NASA 的Hughes等[12]对不同桨间距离的共轴对转螺旋桨气动特性进行了试验测量。研究发现,当对转桨前桨、后桨之间的距离不大时(0.14D~0.25D),改变前、后桨之间的距离对于对转桨整体效率影响不大(图7)。这说明在该桨间距离范围内,前桨滑流中的切向速度对后桨的影响主要是旋向干扰效应。
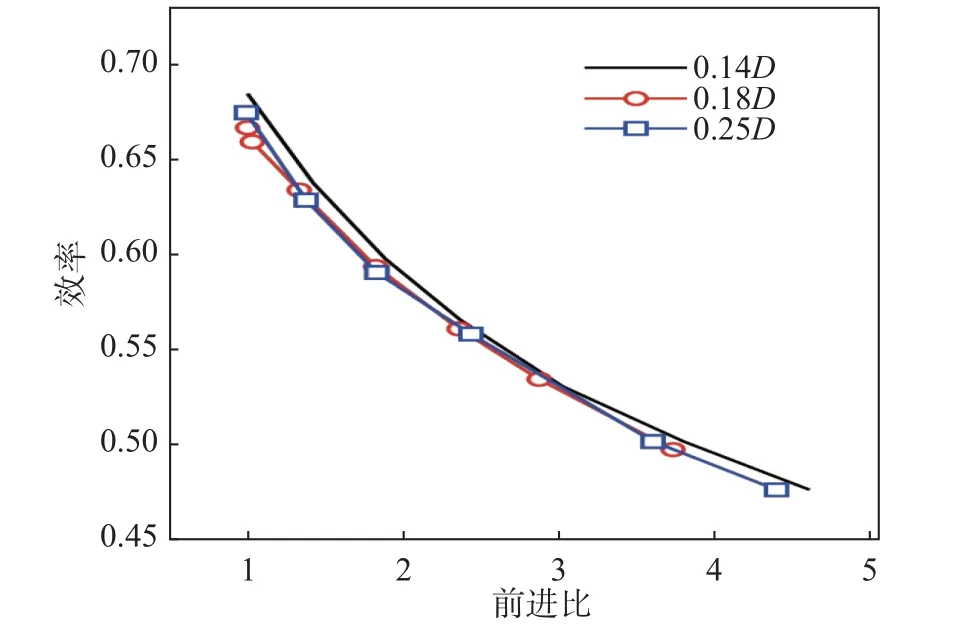
图7 桨间距离对共轴对转螺旋桨的影响[12]Fig.7 Efficiency variations of CRPs with the space between propellers[12]
除了桨叶几何参数的研究,同时期的研究也关注了后桨工作状态对共轴对转螺旋桨整体气动效率的影响。NASA 的Bartlett[13]在试验中对后桨锁止以及后桨风车运动状态下的对转桨气动特性进行了测量,结果表明,当后桨处于锁止或风车状态时,共轴对转螺旋桨整体气动效率甚至要低于单排螺旋桨(图8),这说明共轴对转螺旋桨平均效率的提高,是由于后桨主动旋转回收了前桨滑流中的周向动能,这种效应也称为旋向干扰效应。
由于燃油价格的下跌,欧美等国家在20 世纪80 年代末期暂停了共轴对转螺旋桨的研究工作。而2010 年左右重新启动的共轴对转螺旋桨研究主要集中在气动噪声方面。
我国早期开展的螺旋桨试验研究主要是针对单排螺旋桨。中国航空工业空气动力研究院的徐传宝等[14]采用涡轮空气马达,克服了变频电机带动螺旋桨试验的雷诺数偏低问题,并成功地在低速风洞中完成了螺旋桨的高雷诺数试验(图9)。随后,徐越等[15]对高雷诺数下螺旋桨滑流对机翼的干扰进行测试,研究表明,相同的雷诺数下,随着螺旋桨拉力的增大,机翼的最大升力系数提高(图10,图中Tc为螺旋桨拉力系数)。
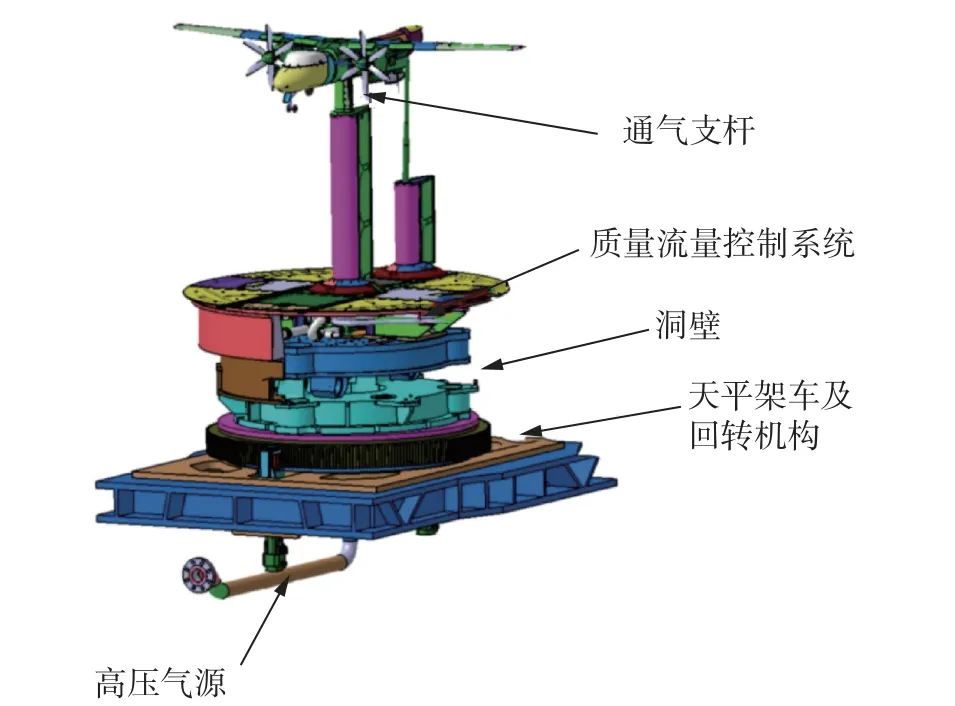
图9 涡轮马达螺旋桨测试平台示意图[14]Fig.9 Skecth of test rig of propeller with turbo motor [14]
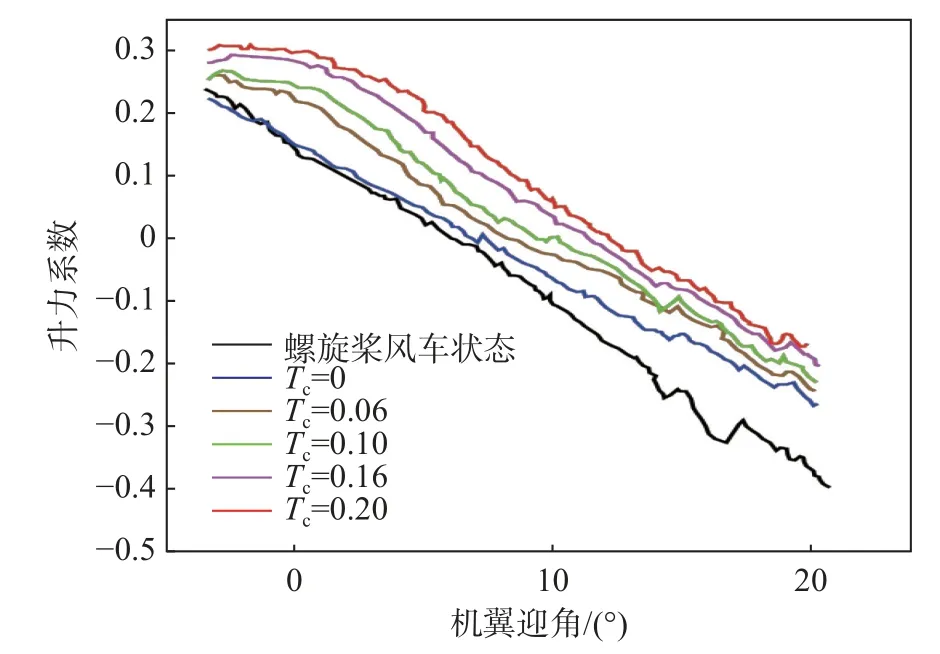
图10 螺旋桨拉力对机翼升力系数的影响[15]Fig.10 Effect of propeller on the wing lift[15]
中国空气动力研究与发展中心的魏春华等[16]利用压敏漆技术测量了螺旋桨桨叶表面的压强分布,并与CFD 计算结果进行了对比。结果表明,计算结果与压敏漆测量结果的误差整体在5%以内(图11),可以用于螺旋桨气动机理性研究。
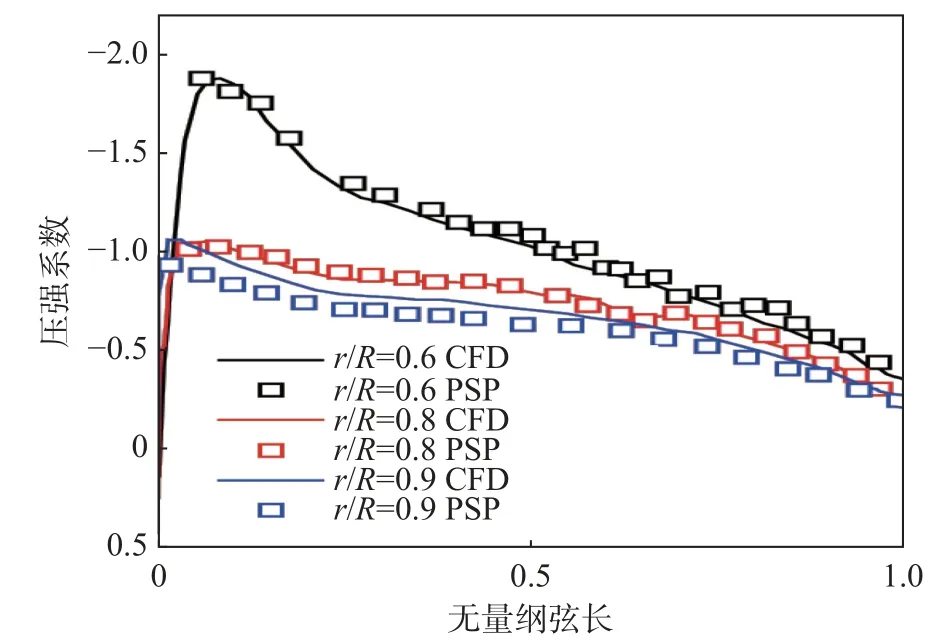
图11 螺旋桨表面平均压强的压敏漆测量与CFD 结果对比[16]Fig.11 Comparision of pressure on propeller blades measured by pressure sensitive paint with CFD [16]
近年来,随着螺旋桨气动性能研究的深入,国内也逐渐开展了共轴对转螺旋桨的气动特性试验研究。陈正武等[17]依托声学风洞,搭建了共轴对转螺旋桨的气动力及气动噪声测量平台(图12),测试试验结果表明,该平台可以完成共轴对转螺旋桨气动力及气动噪声的高精度测量,噪声重复性精度优于0.5 dB。
北京航空航天大学的刘沛清、唐智浩等[18]提出,可将共轴对转螺旋桨作为高空飞艇的高效率推进系统,并针对高空飞艇的低雷诺数、小前进比的运行特点,率先在北京航空航天大学D5 风洞中进行了系列化变参数测量。试验中,通过调整转速完成了螺旋桨的雷诺数变化研究,给出了一定转速下前、后排螺旋桨的效率随前进比的变化曲线(图13),可以发现,在低雷诺数下,与单排螺旋桨相比,对转桨的前排螺旋桨效率低于单桨效率,而后排螺旋桨效率高于单桨效率,但整体上共轴对转螺旋桨的平均效率要高于单排螺旋桨的效率,这与高雷诺数的情况是一致的。
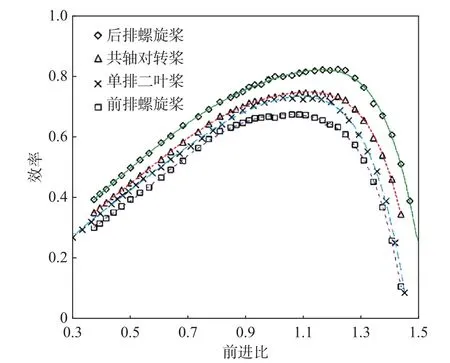
图13 低雷诺数共轴对转螺旋桨气动效率曲线[18]Fig.13 Aerodynamic efficiency of low-Reynolds-number CRPs[18]
目前对共轴对转螺旋桨的试验研究主要以变参数为主,即通过改变共轴对转螺旋桨的桨叶几何形状与工作状态,来研究参数变化对前、后桨及整体气动特性的影响。但为了探索前、后桨间的气流干扰机理,下一步在试验方面有必要继续开发特殊的测量技术。
1.2 气动噪声试验研究
螺旋桨发动机的一个极大的技术难点是螺旋桨桨叶旋转产生的气动噪声问题。研究表明,单排螺旋桨的气动噪声谱由一系列离散噪声和宽频噪声分量组成(如图14a 所示),其中离散噪声是由桨叶通过频率(BPF)确定的谐波分量组成,即在BPF 处出现最高声压级的基频及其谐波分量,且随着谐波阶数的增加,声压级下降。而宽频噪声具有连续谱的特征。在亚声速桨尖速度下,离散噪声分量是由桨叶厚度引起的周期性流动(厚度噪声)和叶片气动力周期性变化引起的载荷噪声。载荷噪声表现为偶极子声源,厚度噪声表现为单极子声源。螺旋桨宽频噪声主要是由叶片与湍流相互作用以及叶片尾缘涡脱落引起。与单排螺旋桨不同的是,共轴对转螺旋桨噪声谱除宽频噪声分量外,其离散噪声分量不但包含前、后桨的单排离散噪声分量,还包含前、后桨干扰造成的离散噪声分量,在谱曲线上存在很多个频率的离散分量(如图14b 所示)。前、后桨桨叶干扰噪声机理复杂,涉及前、后桨流场与声场的非线性耦合问题,目前的基本认知是,共轴桨的干扰噪声最主要反映在前桨对后桨的干扰噪声,即前桨尾迹与桨尖涡周期性地撞击后桨前缘,引起后桨桨叶表面产生非定常压强脉动,从而导致非定常载荷噪声。其中,前桨桨尖涡对后桨桨叶的撞击噪声称为尾涡干扰噪声(blade vortex interaction,BVI),前桨桨叶的尾迹对后桨桨叶的撞击噪声称为尾迹干扰噪声(blade wake interaction,BWI)。同时,后桨诱导的势流场与前桨也存在干扰噪声。
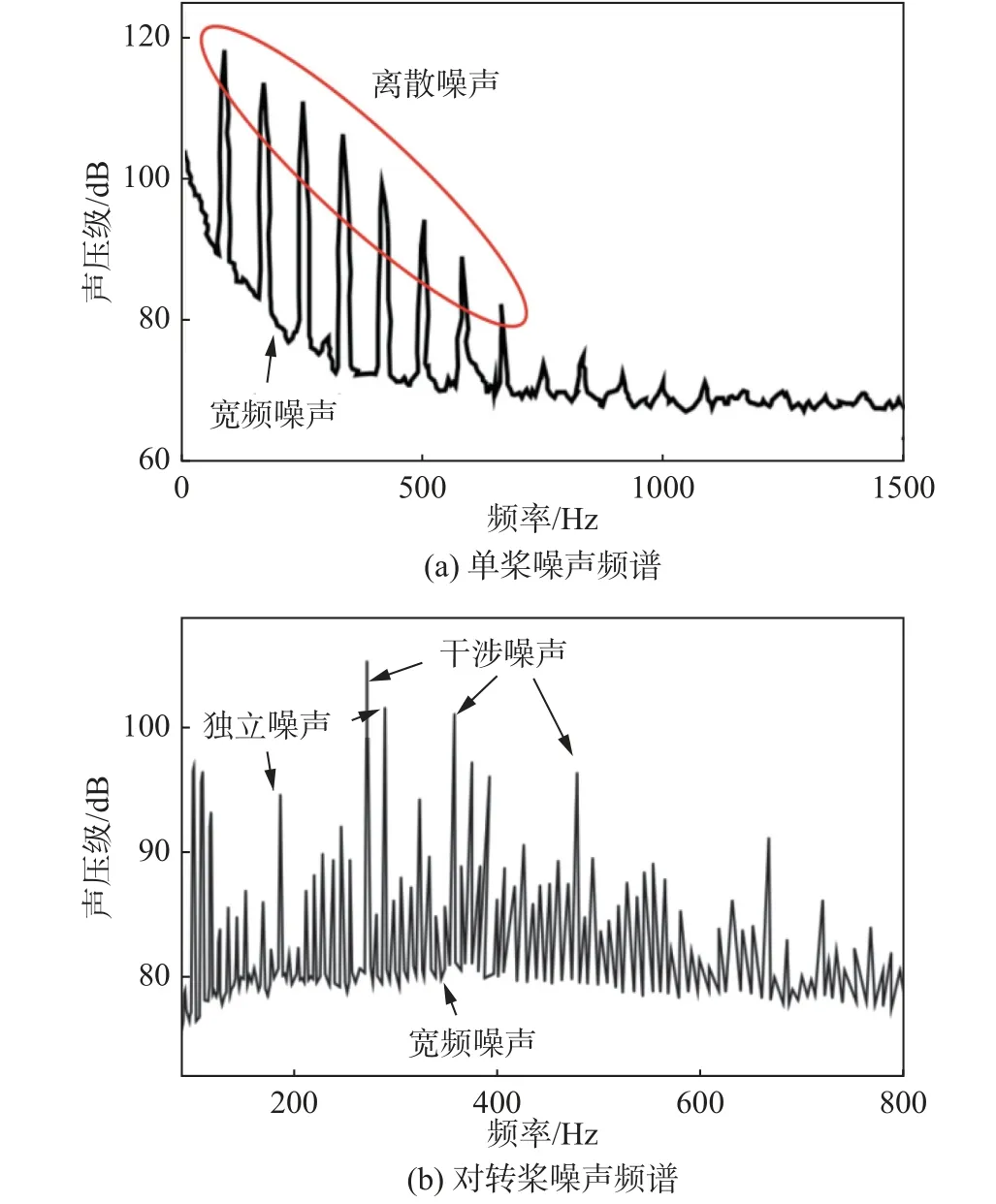
图14 螺旋桨噪声频谱Fig.14 Noise specturm of propeller
美国NASA 在20 世纪80 年代,在先进螺旋桨研究的框架下对旋螺旋桨系统开展了一系列试验[19-22],研究了桨尖马赫数、桨叶后掠角、桨盘间距、桨叶数量等参数变化对螺旋桨的影响及其预测方法。早期对共轴对转螺旋桨气动噪声的测量研究,最具有代表性的是1987 年NASA 在9 × 15 ft 声学风洞中进行的试验(图15),其中共轴对转螺旋桨来流马赫数为0.2(起飞/降落状态)[23]。试验结果表明:桨叶安装角的改变对共轴对转螺旋桨气动力和气动噪声产生明显影响;转子间距则将会影响前桨尾涡强度的耗散,从而对后桨气动噪声产生影响。
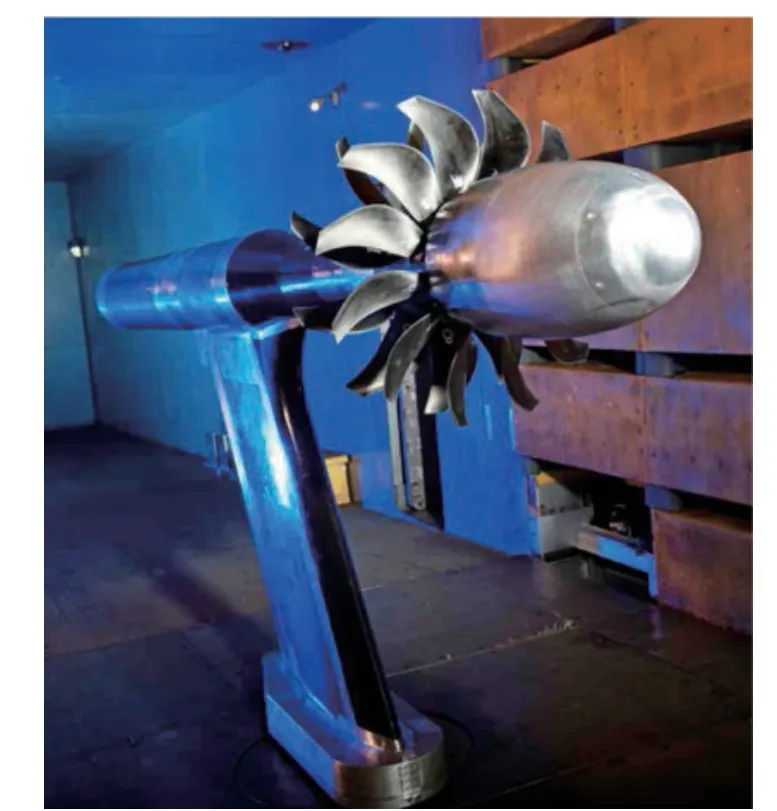
图15 NASA 共轴对转开式转子声学试验[23]Fig.15 Aeroacoustics experiment of CRP in NASA[23]
随后,NASA 还对前桨前掠及后掠的共轴对转螺旋桨进行了气动噪声试验研究[24],发现桨叶前掠会使干扰噪声大幅增加(图16),而对后桨进行剪裁的共轴对转螺旋桨可以降低噪声[21]。然而,受限于当时的试验技术,共轴对转螺旋桨气动噪声的声源及产生机理研究并未深入。
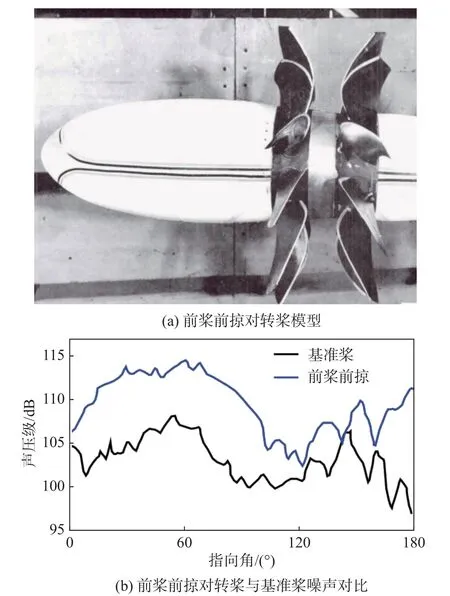
图16 NASA 前桨前掠对转桨噪声试验[21]Fig.16 Forward swept front blade experiment in NASA [21]
英国罗罗公司Ricouard等[25]在德国DNW 风洞中研究了支撑装置对螺旋桨气动噪声的影响。研究发现,位于桨盘前支撑装置的尾迹会对螺旋桨的谐波离散噪声产生一定影响(图17)。但对于共轴对转螺旋桨而言,前桨上游支撑装置的存在对共轴桨的干扰噪声几乎没有影响。这是由于处于桨叶前方的支撑装置产生的尾迹强度要比前桨产生的尾迹强度低,因此其影响不足以改变桨间干扰噪声。
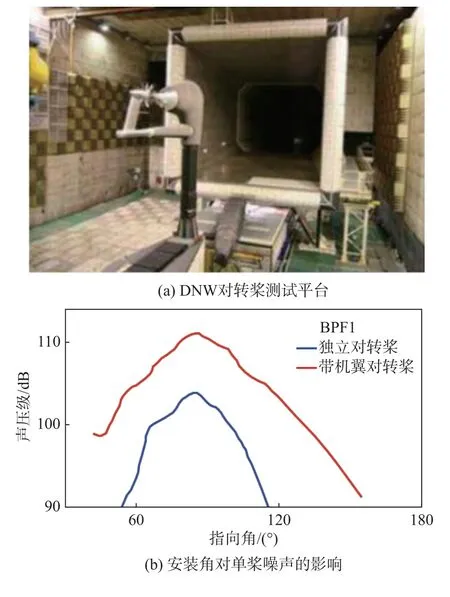
图17 安装效应对共轴对转螺旋桨噪声的影响[25]Fig.17 Install effect on the noise of CRPs [25]
受限于试验技术,早期的研究主要是对共轴对转螺旋桨的远场噪声指向性进行测量。近年来,随着试验技术的发展,对共轴对转螺旋桨气动噪声声源性质和定位的研究也逐渐深入。Horvath等[26]对共轴对转螺旋桨进行了基于波束成形的声源定位试验研究(图18),证实了共轴对转螺旋桨的干扰噪声声源径向位置符合Parry 和Crighton[27]提出的马赫半径的位置。

图18 波束成形对共轴对转螺旋桨干扰噪声的声源定位[26]Fig.18 Beamforming localization of noise source of interaction tones of CRPs [26]
Horváth 还通过试验,证实了共轴对转螺旋桨干扰噪声的马赫半径的符号与螺旋桨相对于观察者的旋转方向相关[28](图19)。当对转桨干扰噪声源对应的马赫半径符号位为正时,该噪声辐射效率较高,反之则较弱。随后,Horvath等[29]又基于与马赫半径相关的干扰噪声辐射效率,提出关于前、后桨桨叶数量搭配的低噪声共轴对转螺旋桨设计意见,即,可以通过前、后桨桨叶数量相等且桨叶数量尽量大的对转桨设计,来降低除上下游以外的远场噪声指向性。
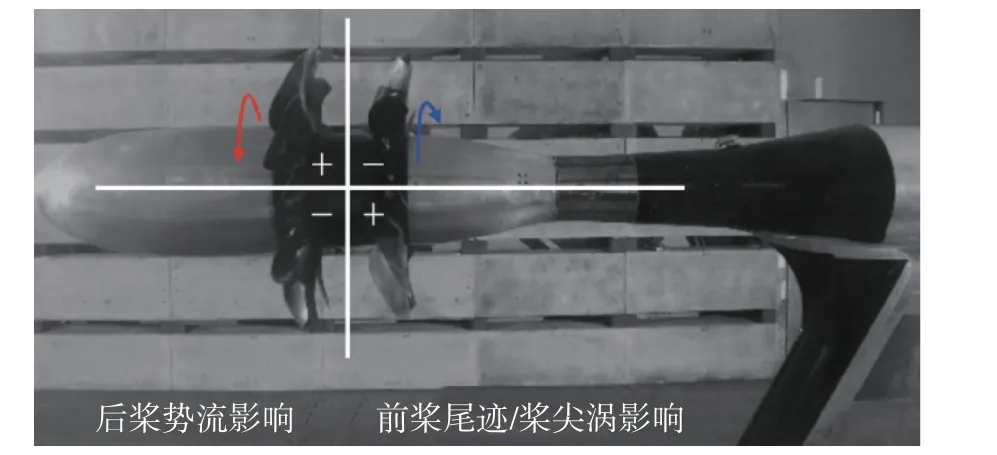
图19 对转桨声源马赫半径符合区域划分[28]Fig.19 Noise source seperated by the quadrant in meridian of CRPs [28]
与气动力的测量比,国内关于单排螺旋桨的气动噪声试验研究相对较少。李晓东等[30]针对单排螺旋桨的缩比模型进行了气动噪声测量,发现单排螺旋桨的远场噪声随着转速的增加而增大(图20)。项松等[31]通过噪声试验,对某型螺旋桨的桨尖降噪优化设计结果进行了试验验证。
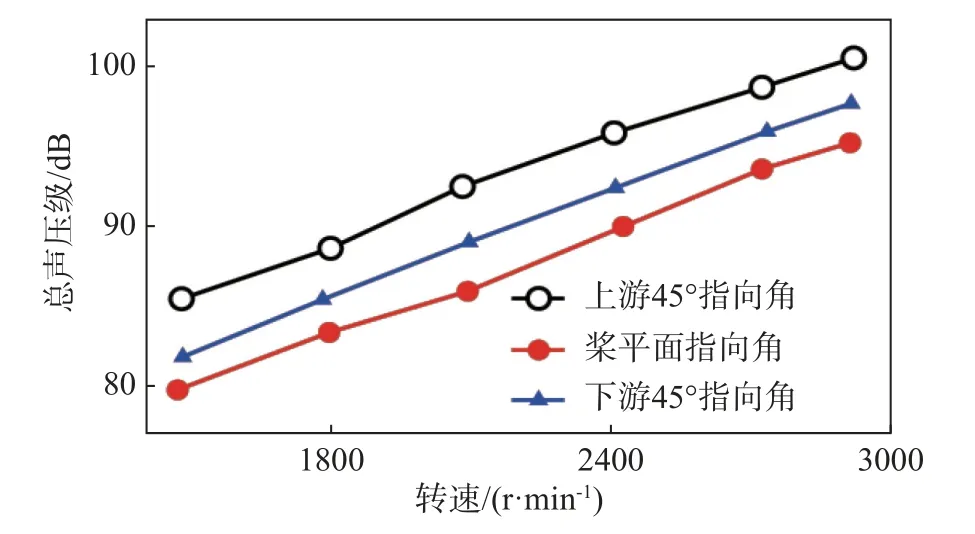
图20 转速对单排螺旋桨噪声的影响[30]Fig.20 Noise of single propeller with different rotating speeds [30]
近年来,随着单排螺旋桨研究的深入,更先进的桨叶设计使得离散噪声逐步减弱,从而使得宽频噪声在单桨气动噪声中的占比逐渐凸显。周家检等[32]通过试验证实,当桨距角及转速逐渐增大时,宽频噪声逐步增强甚至与离散噪声相当(图21)。
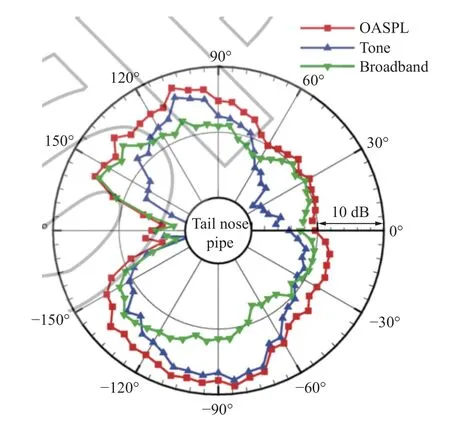
图21 大桨距角下单排螺旋桨各噪声分量占比[32]Fig.21 Noise components of single propeller at large pitch angle [32]
国内关于共轴对转螺旋桨气动噪声的试验研究进展较为缓慢。除了陈正武等[17]对共轴对转螺旋桨气动噪声搭建了试验平台外,最近刘沛清、孙韬[33]在北京航空航天大学D5 声学风洞中,对前、后不同桨叶数量搭配下的共轴对转螺旋桨模型进行了气动噪声试验(图22),研究结果表明:共轴对转螺旋桨的干扰噪声主要是由前桨桨尖涡和尾迹对后桨作用产生的非定常载荷引起的;桨尖涡和尾迹都会随着距离的增加而衰减;当桨间距较小时,因前桨桨尖涡和尾迹的衰减较小,对后桨产生的干扰作用较强,因此产生大的非定常载荷,从而导致大的声压级。
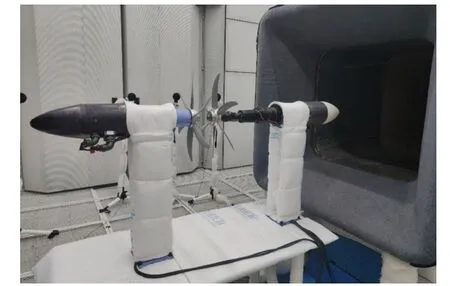
图22 D5 风洞中共轴对转螺旋桨噪声测量试验平台[33]Fig.22 Rig of aeroacoustics measurement of CRPs in D5 wind tunnel [33]
2 共轴对转螺旋桨片条理论的发展
目前,单排螺旋桨气动力的工程预测方法已经发展得比较成熟。在单排螺旋桨气动力工程计算方面,刘沛清进行了详细的总结[1],目前比较主流的工程预测方法有:1)动量理论[34]:将螺旋桨假设为一个动量盘,仅考虑螺旋桨产生的纵向速度变化引起的动量变化,从而获得螺旋桨受力行为。该方法虽然简单,但无法考虑螺旋桨几何外形,因此无法用于螺旋桨的气动设计。2)动量叶素理论[35]:将螺旋桨桨叶沿径向剖分为一系列离散叶素,桨叶总气动力由各个叶素受力在径向的积分得到。相比动量理论,动量叶素理论可以建立桨叶几何形状与螺旋桨气动力的关系,因此可以用于螺旋桨气动设计。不过,来流的合成速度(来流相对叶素的速度)与叶素迎角仅考虑了几何迎角,而没有考虑桨叶脱离的自由涡面引起的下洗效应。3)涡流理论[36]:将螺旋桨桨叶沿径向剖分为一系列离散的叶素,但来流合成速度与叶素迎角考虑了桨叶脱离的自由涡面引起的下洗效应。认为螺旋桨桨叶如同有限翼展机翼一样,在其后方拖出螺旋形自由尾涡面。桨叶下游的下洗角是该自由尾涡面对流动诱导的结果。该理论更加真实地表征了螺旋桨滑流对叶素附近来流的诱导作用,因此对螺旋桨气动性能的计算更为准确。4)片条理论[37]:片条理论是由英国空气动力学家Glauert 在1926 年提出的。Glauert 针对单排螺旋桨,基于Joukowski 的涡流理论模型[36],将Prandtl 的有限翼展升力线理论应用于螺旋桨涡流模型中,考虑了桨叶脱落涡的诱导作用。迄今为止,片条理论依然是螺旋桨气动设计和性能分析中最有效的工程方法。
共轴对转螺旋桨的气动力工程预测方法是从单排螺旋桨的气动理论基础上发展起来的。1941 年,Lock 在Glauert 理论[38]的基础上,首次提出了适用于相互靠近的两个单排螺旋桨的气动理论。该方法首先利用动量理论解决了相互靠近的螺旋桨所受到干扰速度的大小及分布问题,再将分析得到的干扰速度代入到叶素理论中,从而进行螺旋桨整体气动性能的求解[39]。1943 年,Naiman 在螺旋桨涡流理论的基础上,结合Goldstein 修正方程[40],提出了比Lock 的理论更易于使用的共轴对转螺旋桨气动理论[41]。该方法与单桨片条理论类似,通过求解桨叶径向各微段上叶素的气动力,经过积分得到共轴对转螺旋桨整体的气动力。Page 和Liebeck[42]则通过联合涡流理论与叶素理论的方法,对共轴对转螺旋桨气动力进行快速评估,但是和Lock 与Naiman 的方法一样,该理论无法对共轴对转螺旋桨前、后桨之间的距离对气动力的影响进行模化。20 世纪90 年代以后,由于计算机能力以及CFD 技术的蓬勃发展,使得快速预测方法的发展放缓。但是如同单桨片条理论一样,共轴对转螺旋桨的快速预测方法可以在设计初期,根据技术指标要求,快速得到螺旋桨各几何参数对螺旋桨气动力的影响规律,因此依旧在共轴对转螺旋桨气动力计算和快速优化中得到应用。
刘沛清、唐智浩[43]在单桨片条理论的基础上,针对共轴对转螺旋桨提出了三条基于小扰动线化理论的假设,并对共轴对转螺旋桨的片条理论的推导给出进一步完善,同时结合试验数据建议了相关参数的取值。三条基本假设为:1)诱导速度场是均匀的,前、后桨之间以及共轴对转螺旋桨上游及下游的诱导速度场可借用旋涡柱体圆周上的平均速度形式来表达,且不考虑气流沿桨叶的径向流动;2)每排螺旋桨产生的诱导速度场是互相独立的,并与单排螺旋桨产生的诱导速度场的方式相同;3)每排螺旋桨产生的诱导速度场可看成是自身诱导速度与干扰速度的线性叠加。
已有研究证实[36,44],螺旋桨工作时轴向速度和环向速度的加速方式是不一样的。图23(a)给出了轴向诱导速度沿轴向变化的示意图。在桨盘前较远处,轴向诱导速度很小。当气流逐渐靠近桨盘时,轴向诱导速度缓慢增加,直到气流到达桨盘平面处,轴向诱导速度增加到某一确定值wa。当气流离开桨盘平面后,轴向诱导速度继续增加,直到离桨盘较远处,轴向诱导速度的大小约为桨盘处轴向诱导速度的2 倍。图23(b)给出了螺旋桨桨盘附近环向诱导速度沿轴向变化示意图。无论处于桨盘前什么位置,气流的环向诱导速度几乎为零。当气流到达桨盘位置时,环向诱导速度会以阶跃的方式跃升至某一确定值wt。而当气流刚离开桨盘平面时,环向诱导速度大小又会马上跃升为桨盘平面处环向诱导速度的2 倍,并保持这个值直到桨盘后无穷远处。不难推断,二维叶素产生的诱导速度沿轴向气流流向的变化也有相同的规律。
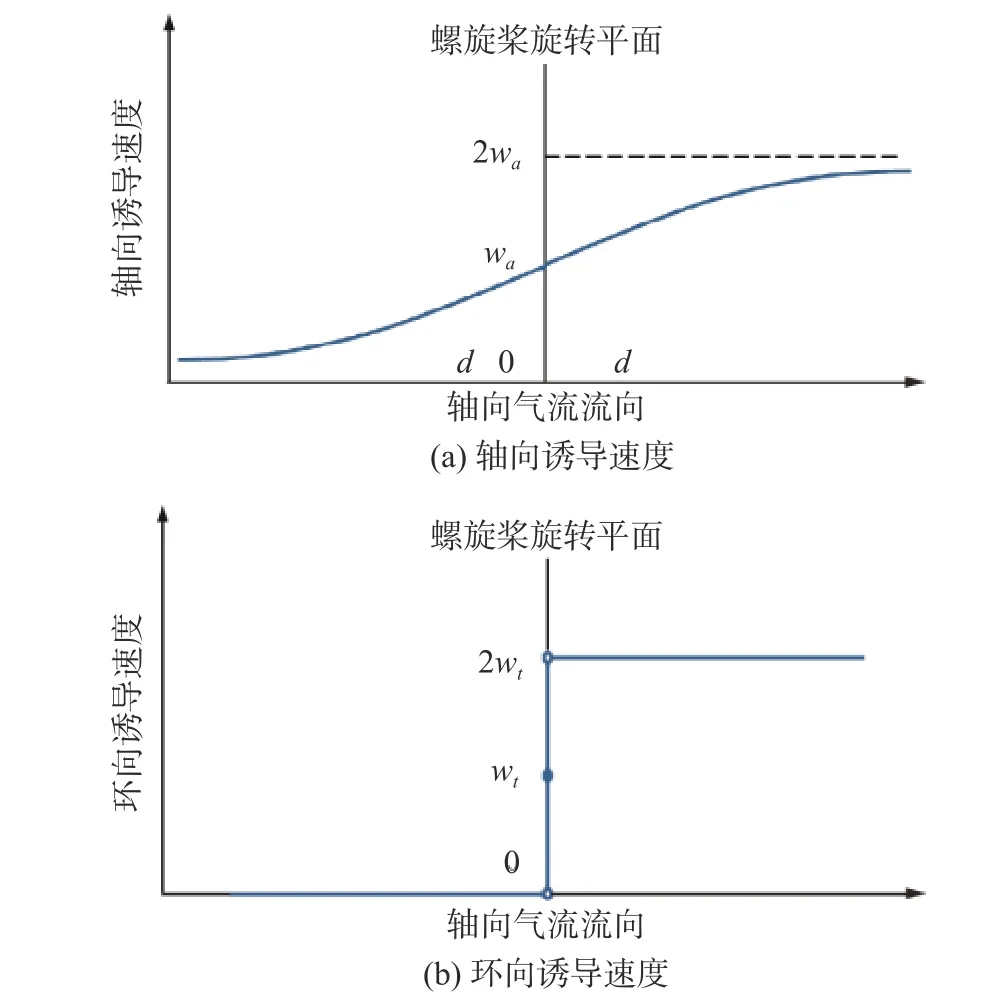
图23 螺旋桨诱导速度变化规律Fig.23 Induced propeller velocity
基于螺旋桨诱导速度的这一性质可知,在螺旋桨桨盘前、后,轴向气流速度均会受到影响,但根据到桨盘的距离不同,影响的强弱也不同。为了分析共轴对转螺旋桨桨盘间距对诱导速度的影响,定义桨盘轴向间距为d时的间距干扰系数为λ[39]。此时在桨盘前轴向距离为d的位置,轴向诱导速度为(1 -λw)a,在桨盘后轴向距离为d处,轴向诱导速度为(1+λw)a,其中0<λ<1,如图24 所示。而螺旋桨前、后环向诱导速度则不受距离桨盘的距离影响。
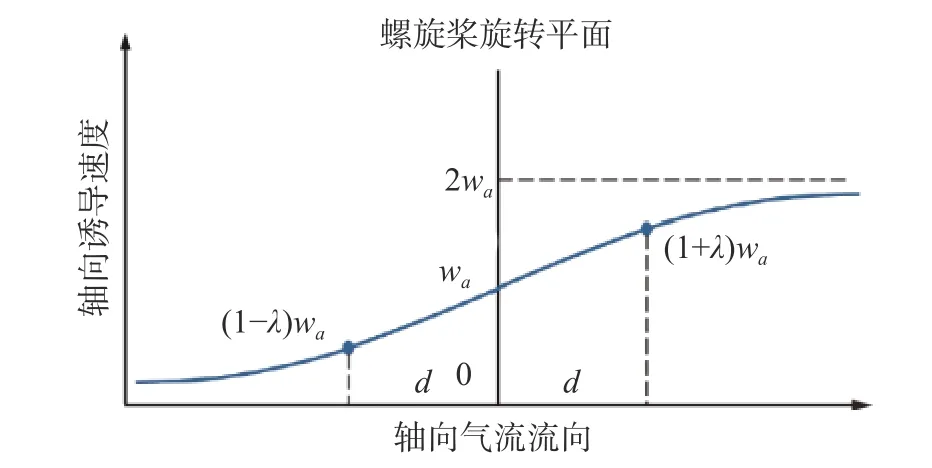
图24 共轴对转螺旋桨轴向诱导速度沿轴向分布Fig.24 Induced axial velocity of CRPs along the streamwise direction
由上述分析可知,由于共轴对转螺旋桨的前桨处于后桨桨盘前,因此会受到来自后桨的轴向诱导速度干扰,干扰大小与前、后桨之间的距离有关。但是后桨对前桨桨盘的环向诱导速度干扰基本可以忽略不计,如图25(a)[44]所示。同时,后桨处于前桨的滑流中,因此会同时受到前桨引起的轴向和环向两个方向的诱导速度干扰,其中轴向干扰与前、后桨间距有关,环向干扰则与间距无关,如图25(b)[44]所示。
根据共轴对转螺旋桨片条理论的基本假设,可以得到前桨和后桨桨叶叶素的速度三角形,如图26 所示。由此可知,在考虑来自后桨的干扰后,前桨叶素的轴向速度和环向速度可写为:
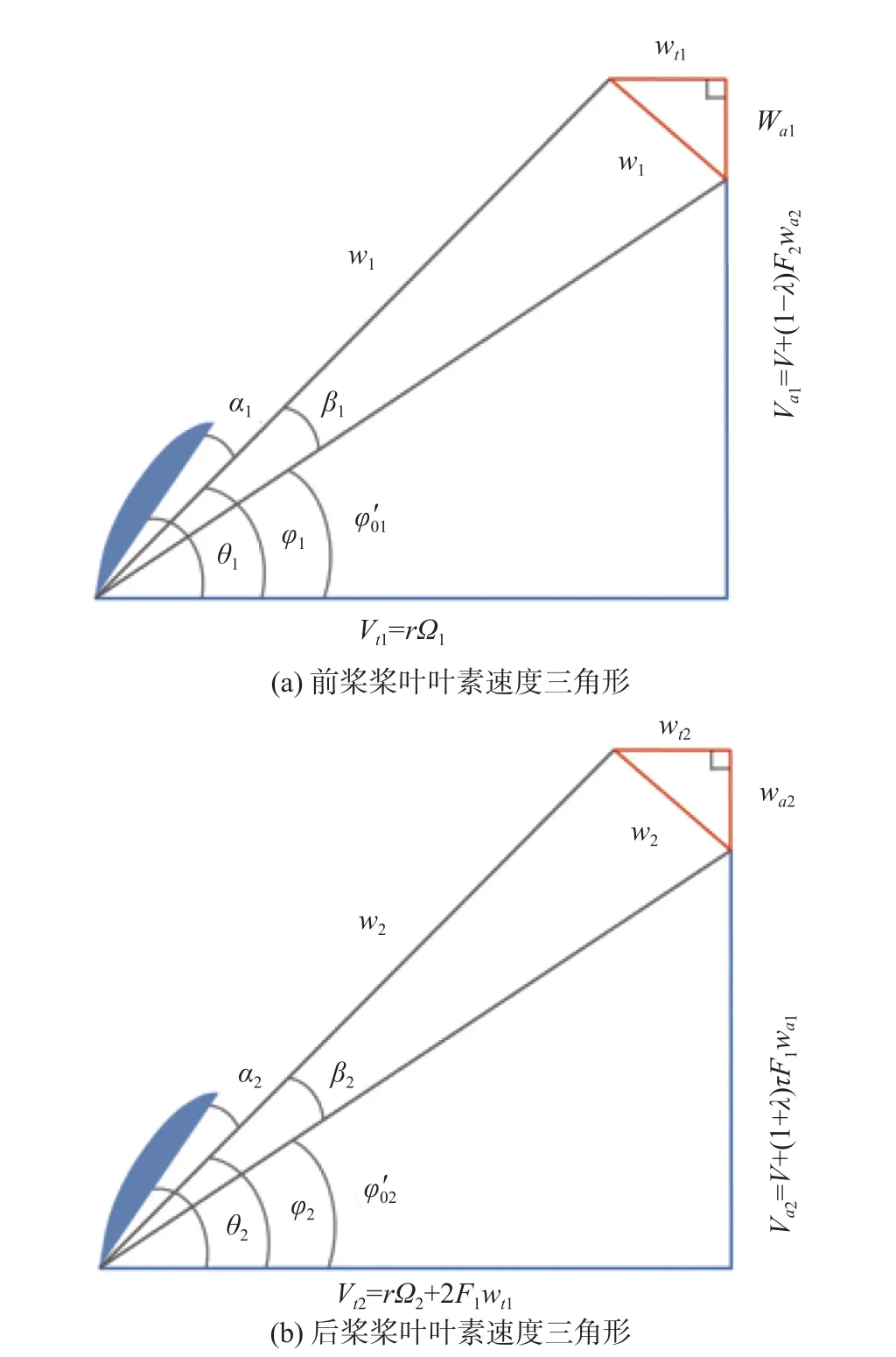
图26 共轴对转螺旋桨速度三角形Fig.26 Velocity triangle on airfoil of Counter Rotating Propeller
式中:V为螺旋桨平飞速度;Ω1为前桨旋转角速度;F2为后桨的桨尖动量损失系数。另外,由于后桨处于前桨的滑流中,难免会对前桨滑流区轴向诱导速度产生影响,称之为后桨对前桨滑流的轴向阻塞效应,阻塞系数为τ。由此可以得到后桨叶素的轴向速度和环向速度分别为
最后,在前、后桨各自速度三角形下对前、后桨应用联系方程进行迭代求解,即可得到共轴对转螺旋桨前、后叶素上的气动力:
式中:下标i=(1,2)分别代表前、后螺旋桨;σ为叶素处的实度;CL为叶素处的升力系数;F为Prandtl 桨尖动量损失系数;φ为前、后桨叶素气流角度;β为叶素气流干扰角度;γ为叶素阻升角。
经与试验数据对比,唐智浩建议桨间干扰系数为λ=0.45和τ=0.20,试验结果与计算结果吻合较好。通过引入桨间干扰因子,共轴对转螺旋桨的片条理论可以对螺旋桨的气动力进行更为准确的预测(如图27 所示)。这一方法弥补了早期共轴对转螺旋桨片条理论的缺失,可用于共轴对转螺旋桨的气动力计算和设计。同时,该方法可以与其他优化算法进行结合,应用于共轴对转螺旋桨的快速优化领域,对共轴对转螺旋桨的气动优化设计提供了有效的气动力计算方法。
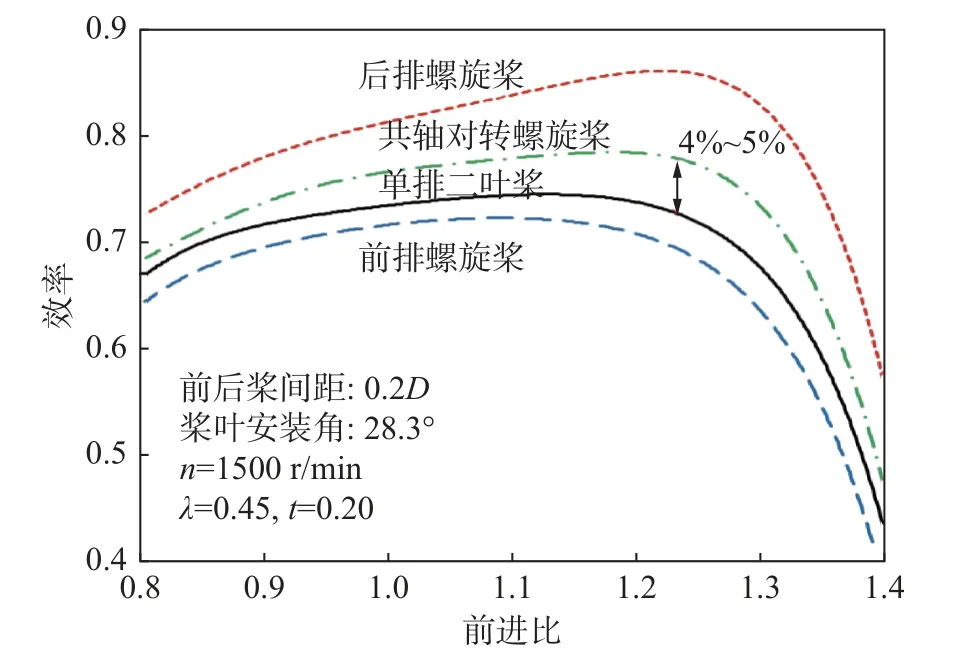
图27 共轴螺旋桨效率[43]Fig.27 Coaxial propeller efficiency [43]
3 共轴对转螺旋桨流场数值模拟
螺旋桨附近流场极其复杂,通过试验测量的方式获取的信息却比较有限。因此,通过数值模拟方法对螺旋桨附近流场进行模拟,是深入分析螺旋桨/共轴对转螺旋桨气动机理的重要手段。首先应当指出,在传统的贴体网格下,实际上物体(螺旋桨)并没有办法如同真实情况一样在静止参考系下进行旋转。这是由于螺旋桨的旋转会使网格拓扑结构发生改变,因此需要每个计算时间步长上都进行网格的重新生成。为了克服这一问题,就需要在相对静止的参考系中对螺旋桨附近的流场进行模拟。即,螺旋桨附近的网格在空间中整体旋转,单螺旋桨与附近网格之间的相对关系并不发生改变。此时,相当于螺旋桨在相对静止的网格内进行计算,并需要在求解流体控制方程时引入向心力及科氏力的影响。图28 给出了该过程的示意图。
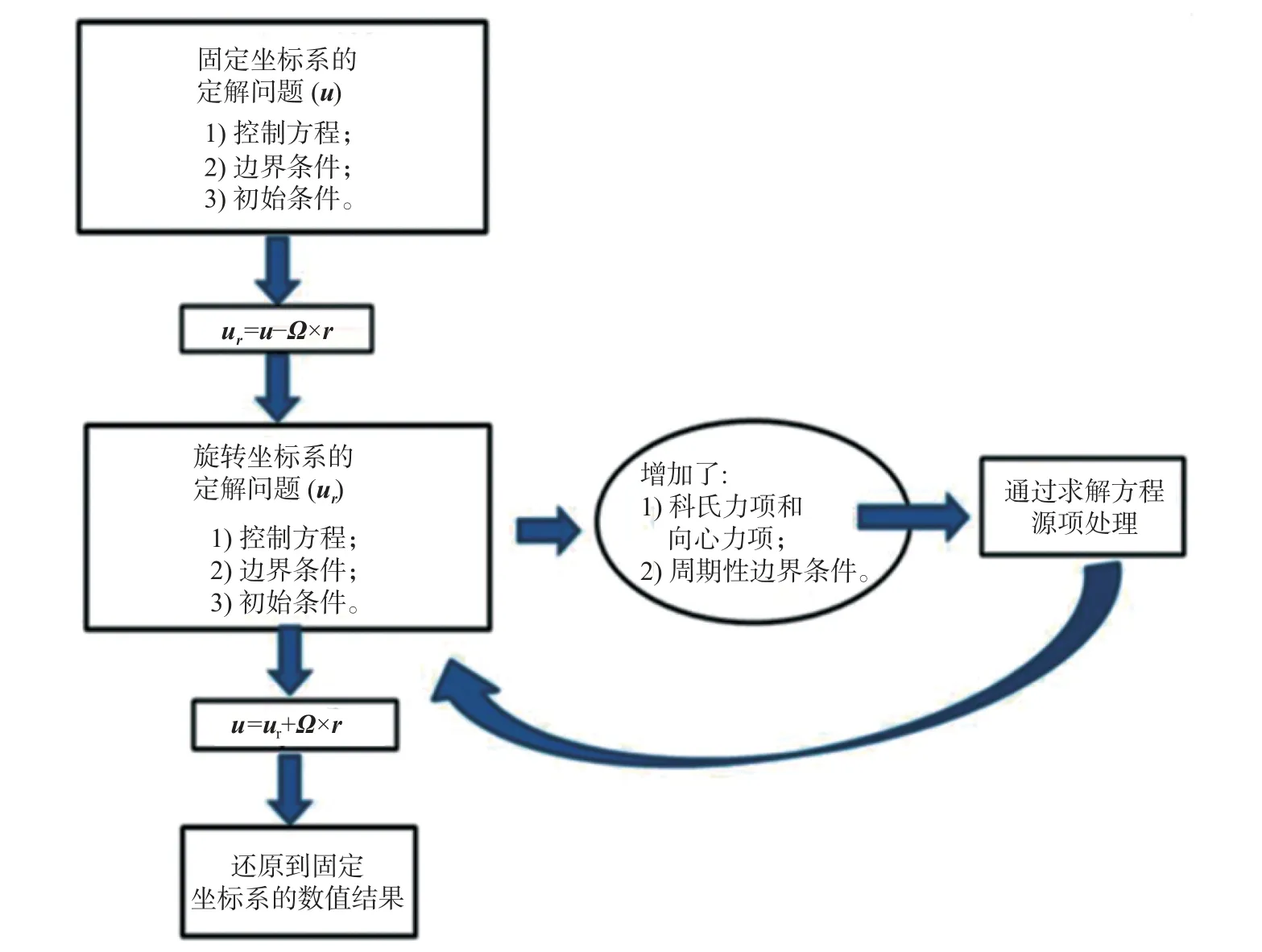
图28 螺旋桨相对静止参考系计算过程Fig.28 Process of propeller calculation in a relative stationary reference frame
20 世纪80 年代,利用相对静止参考系内的求解方法,研究人员通过求解三维Euler 方程,对单排实体螺旋桨绕流进行了数值模拟[45-47]。结果表明,虽然基于Euler 方程的计算结果在一定程度上可以用于单排螺旋桨流动分析,但由于缺少黏性,无法得到螺旋桨的气动效率及桨上载荷的高精度结果。1992 年,Srinviasan等[48]首次利用N-S 方程数值模拟了旋翼附近流场。然而受当时的CFD 技术的限制,在随后相当长的时间内,螺旋桨绕流数值研究仍未考虑黏性的影响。直到21 世纪初,随着德国宇航中心DLR 开发的TAU 非结构网格求解器的能力扩展至适用于具有相对运动的嵌套网格上[49-51](如图29 所示),利用N-S 方程解算器研究螺旋桨绕流场的方法才开始被广泛应用[52-53]。
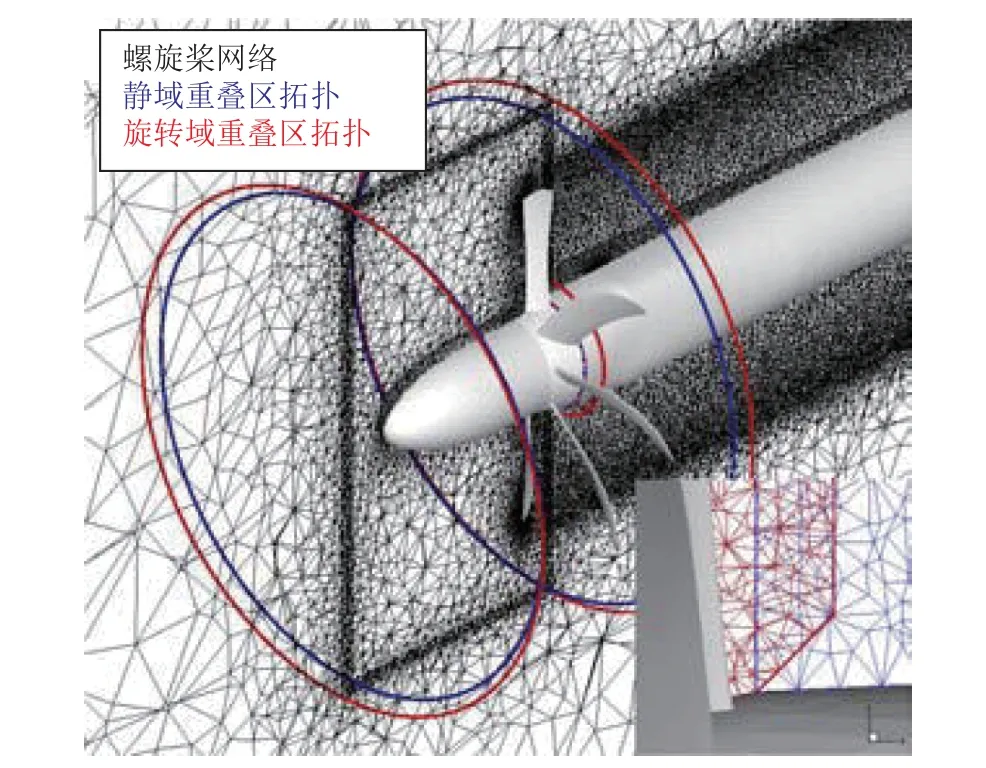
图29 TAU 非定常求解器在螺旋桨计算中的嵌套网格[49]Fig.29 Nested grid of TAU unsteady solver in propeller calculation[49]
许和勇等[54]采用非定常的嵌套网格方法对单排螺旋桨进行了模拟,结果表明,通过该方法计算得到的螺旋桨后方机翼升力系数与试验测量值相差不大(图30)。
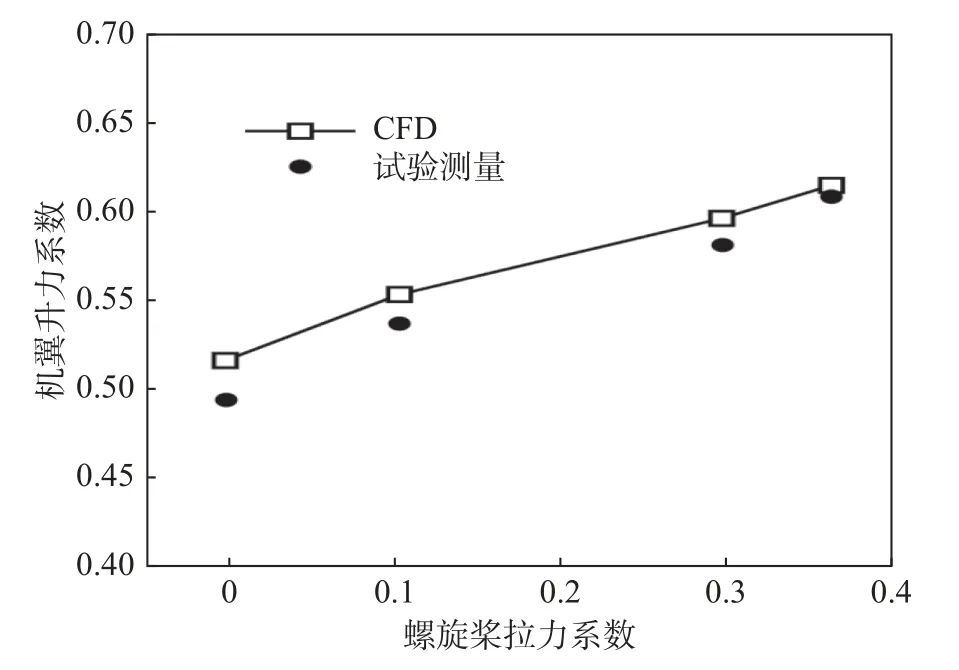
图30 螺旋桨拉力系数仿真结果与试验值对比[54]Fig.30 Comparision of thrust force of single propeller in simualtion and experiment [54]
乔宇航等[55]在螺旋桨区域以及机翼区域分别通过非结构和结构网格进行网格划分,对单排螺旋桨与其后机翼的相互干扰进行了研究。针对螺旋桨特征雷诺数在1 × 104量级这一问题,采用了k-ωSST 湍流模型耦合γ-Re转捩模型进行模拟。结果表明,螺旋桨放置于机翼后方时对机翼影响更小,并且对两叶螺旋桨而言,机翼产生的影响与螺旋桨的前、后位置无关。龚小权等[56]采用类似的重叠网格技术,模拟了单排螺旋桨与螺旋桨飞机之间的干扰,不同的是,在模拟中机身附近的网格也是通过非结构网格划分的。结果表明,通过采用各项异性的三角形非结构网格结合高精度的隐式求解方法(二阶时间格式),可以对螺旋桨及机翼的涡结构进行很好的捕捉(图31)。
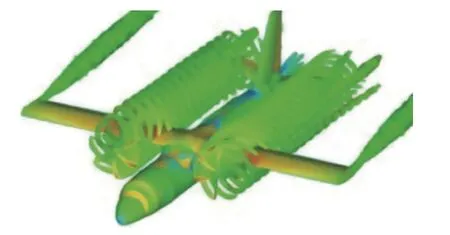
图31 单排螺旋桨与机翼干扰的滑流结构模拟[56]Fig.31 Numerical simulated vorticity field of the propeller and aircraft[56]
在流体力学数值模拟中,需要结合湍流模型来对时均流动的N-S 方程进行求解,在螺旋桨模拟中应用最广泛的就是Spalart-Allmaras(SA)及k-ωSST 湍流模型。关于螺旋桨数值模拟中的湍流模型选择,Delft 理工学院的Stokkermans等[57]进行了对比研究,发现如果仅对独立的螺旋桨进行模拟,则两种湍流模型之间的差异不大,但是SA 湍流模型模拟的螺旋桨与机翼相互干扰的结果更准确(图32)。
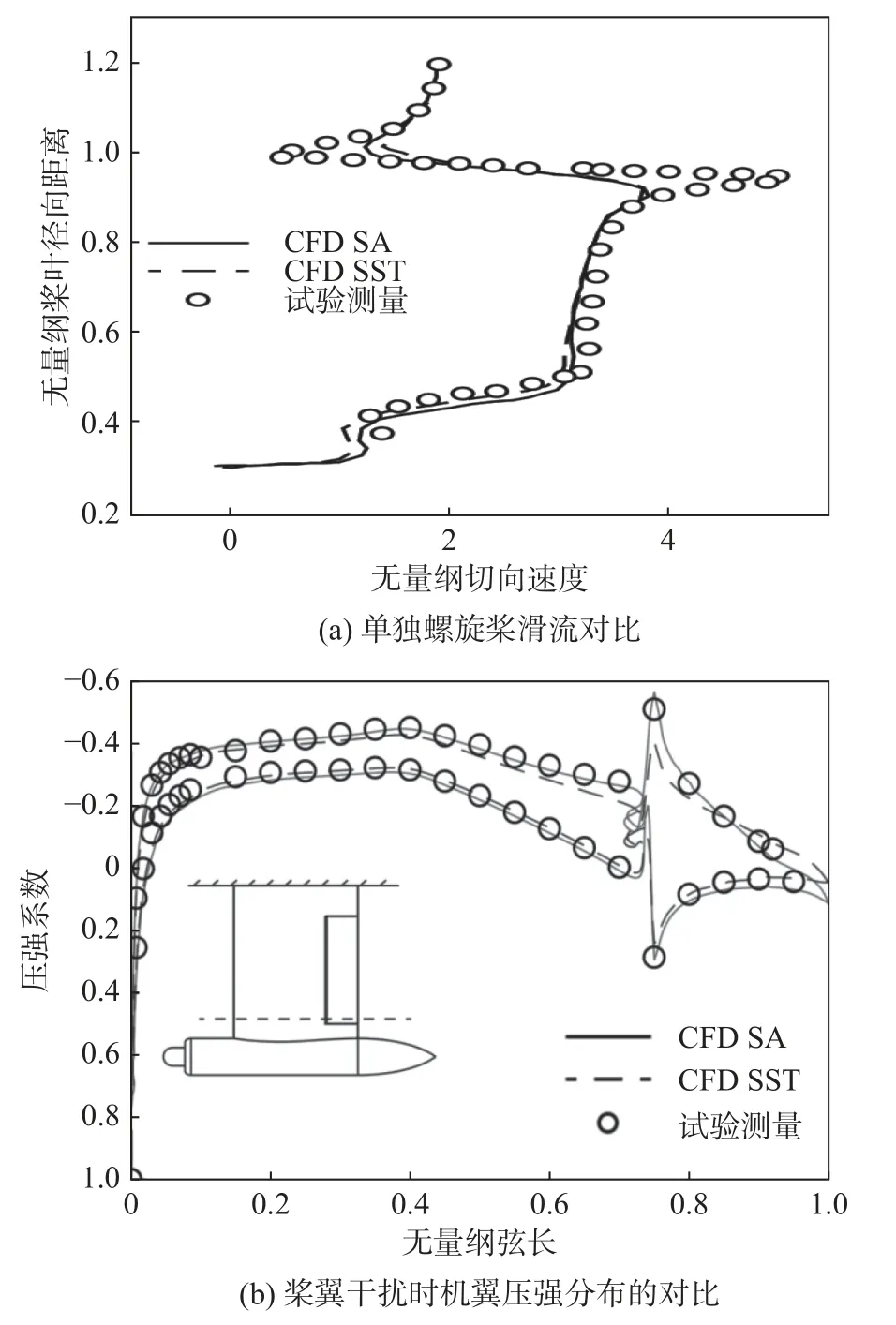
图32 不同湍流模型在螺旋桨模拟中的结果与试验测量的对比[57]Fig.32 Comparision of propeller simulation with various turbulence models [57]
对于单排螺旋桨,通常可以采用包裹螺旋桨并延伸至远场的整体数值模拟(如图33a 所示)。相比之下,共轴对转螺旋桨由前、后两排螺旋桨组成,在网格拓扑上会存在一个前、后桨之间的交界面(如图33b所示)。如何确保流动信息精确、有效地穿过这个交界面,是共轴对转螺旋桨数值模拟的一个难点。
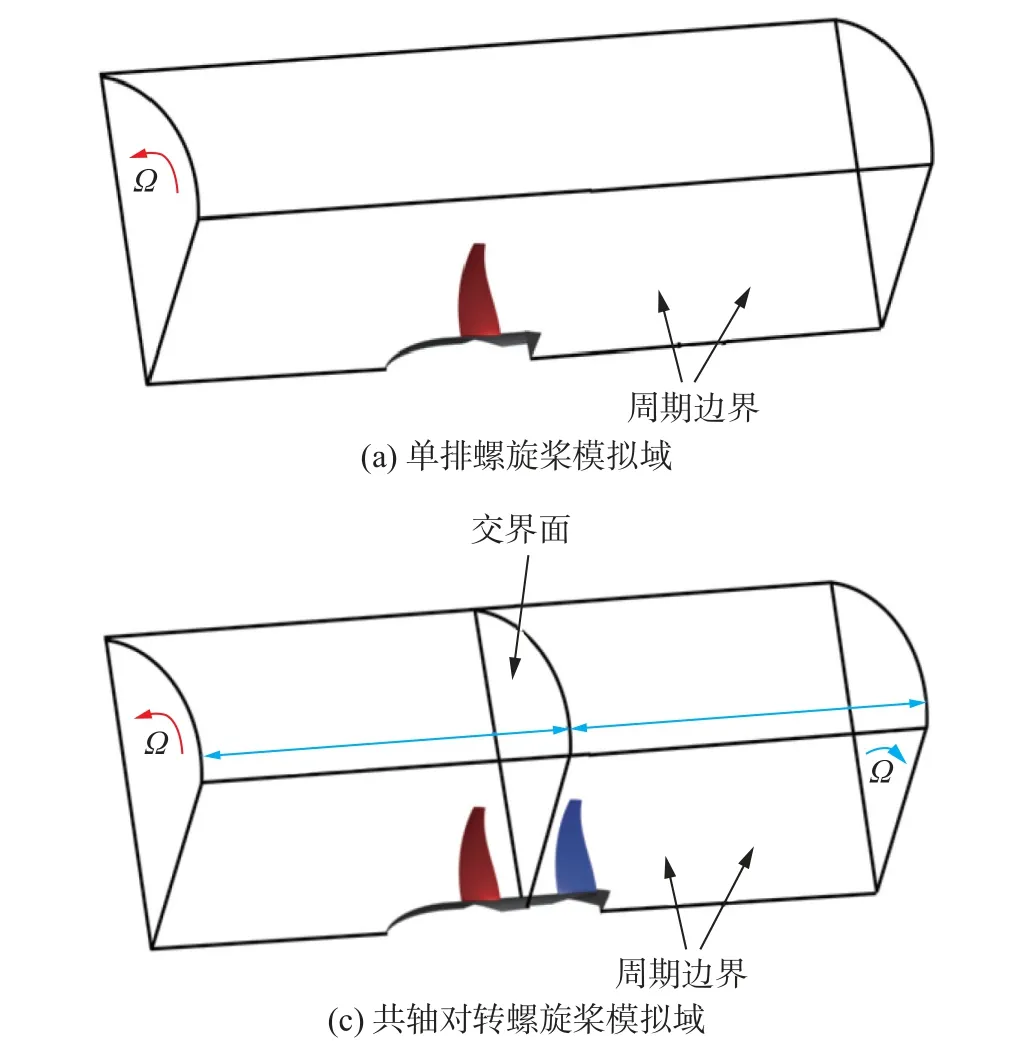
图33 螺旋桨模拟域Fig.33 Propeller numerical simulation area
Gerolymos 于1999 年提出了适用于多级转子计算的混合平面模型[58],这一方法相当于通过时均后的代理模型模化了相邻旋转级之间的非定常效应,从而降低计算量。该方法结合旋转周期边界条件[59],已被广泛应用于共轴对转螺旋桨的单通道网格定常气动评估[60-61]。由于是时均化模型,混合平面模型并不能应用于非定常计算中。为此Gerolymos 于2002 年进一步提出了适用于非定常计算的级间周期性即时交界面模型[62],通过该方法结合旋转周期边界条件,可以对非定常多级转子进行单通道数值模拟。但是,由于共轴对转螺旋桨即使在单通道下的网格量仍然较大且非定常时间步的计算消耗巨大,直到2008 年Stuermer[63]才首次完成了共轴对转螺旋桨的URANS非定常流动模拟。夏贞锋和杨永[64]通过这一方法对共轴对转螺旋桨的非定常气动力进行了研究,发现相较单排螺旋桨而言,共轴对转螺旋桨前桨气动力下降、后桨气动力提升。黄嘉伟[65]对悬停状态下的共轴对转双旋翼与机身的干扰进行了数值模拟,发现共轴对转双旋翼的存在会影响直升机的尾推力(图34)。
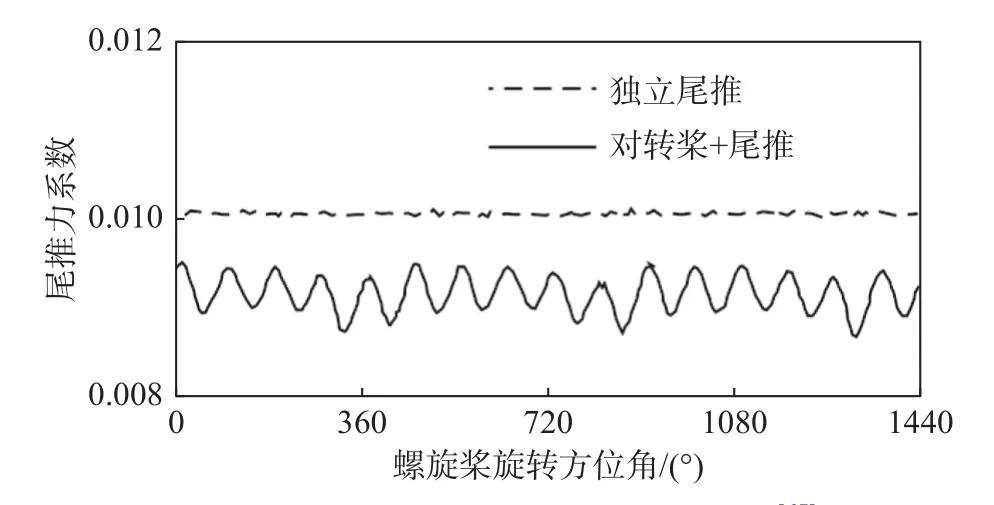
图34 对转桨对尾推桨拉力系数的影响[65]Fig.34 Effect of CRPs on the thrust force of tail propeller[65]
在对共轴对转螺旋桨桨叶进行数值模拟研究时,往往需要模拟大量几何参数,此时网格的重新划分会导致整个数值模拟过程变长。为此,史文博等[66]采用动态分块网格对共轴对转螺旋桨进行了模拟。该方法在桨叶几何参数变化时,仅需要对桨叶附近分块内的网格进行重新划分,因此可以很好地解决共轴对转螺旋桨不同桨距角工况下网格划分工作量大的问题,同时也非常适合于共轴对转螺旋桨气动噪声的高阶优化过程。李治达等[67]对大后掠的共轴对转螺旋桨桨扇进行了数值模拟,对比了数值结果与NASA对转桨叶表面压强的试验测量结果,发现数值模拟可以很好地捕捉共轴对转螺旋桨桨叶表面的压强分布(图35)。
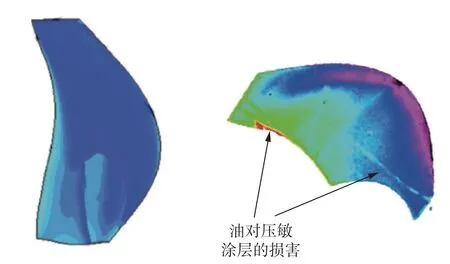
图35 对转桨后桨数值模拟与压敏漆测量结果的对比[67]Fig.35 Comparision of rear blade pressure distribution obtained by pressure sensitive paint and CFD[67]
近十年来,随着共轴对转螺旋桨气动噪声研究的日益增长,共轴对转螺旋桨的全通道数值模拟也逐渐增多。其中既包含通过URANS 方程求解传统贴体网格的全通道计算[28,45],也包含采用笛卡尔网格结合浸没边界算法的共轴对转螺旋桨高精度模拟[51,68](图36)。
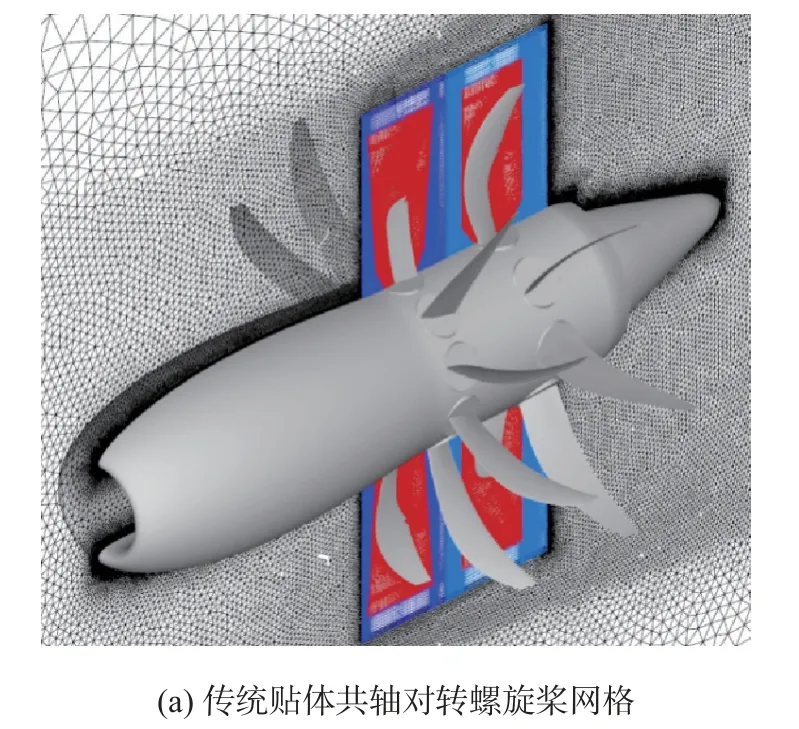
图36 共轴对转螺旋桨全通道非定常流场模拟Fig.36 Tendency of propeller simulation
4 共轴对转螺旋桨气动噪声预测
共轴对转螺旋桨气动噪声的研究自其诞生就一直受到关注。进入21 世纪,在燃油及环境要求的驱动下,相关科研机构投入了大量精力对其进行了研究[4,8]。共轴对转螺旋桨气动噪声的主要特点是:除了包含单排螺旋桨噪声的离散分量外,还包含前桨尾迹(桨尖涡)与后桨之间的相互干扰噪声,以及后桨势流与前桨产生的干扰噪声(如图37 所示)。正是这些干扰噪声的存在,使得共轴对转螺旋桨的气动噪声一般大于单桨噪声。虽然近年来也陆续开展了共轴对转螺旋桨的宽频噪声研究[69],但主要方向还是针对干扰离散噪声,主要手段是数值模拟和风洞试验。
气动噪声数值模拟,可以通过气动声学算法直接对噪声产生及传播进行模拟(直接噪声模拟方法),也可以通过数值模拟近场声源然后积分得到远场声传播(混合噪声模拟方法)。混合噪声模拟方法有Lighthill 声学类比法[70]、FW-H方程[71]、Kirchhoff 公式[72]等。虽然近十年计算气动声学(computational aero-acoustics,CAA)已经有了长足的发展,但是直接模拟共轴对转螺旋桨气动噪声仍很困难。目前在螺旋桨气动噪声领域广泛应用的还是混合气动噪声算法,即侧重于对近场流场特性的高精度数值模拟,然后求解FW-H 方程获得远场噪声的预测[45,73-74]。
FW-H 方程是在Lighthill 声学类比方程基础上,为预测运动部件远场噪声而推导出的。目前在螺旋桨噪声领域对于FW-H 的求解主要有适用于工程快速预测的频域法和侧重于科学研究的高精度时域法。在频域法中,Hanson 首先在螺旋坐标系下依据FW-H 方程推导出单桨远场离散噪声的频域公式[75]。经过傅里叶变换,螺旋桨远场噪声声压可以被认为是由一系列离散的噪声分量叠加而成的(忽略宽频噪声分量),即
式中:PmB为各谐波下的螺旋桨噪声分量幅值;m为谐波数;B为桨叶数量;ΩD为螺旋桨旋转角速度;t为时间。压力波的频域分量可分解为:
其中,PVm是由桨叶厚度在旋转过程中周期性地排开气体导致的厚度噪声分量,PDm和PLm分别是由桨叶定常载荷阻力和升力周期性作用在空气上引起的载荷噪声,剩余的三项则是由螺旋桨的四极子噪声分量引起的,通过积分计算可以快速获得各项[27,75]。
同样,Hanson 也对共轴对转螺旋桨离散噪声中的干扰噪声进行了理论推导[76]。共轴对转螺旋桨的干扰噪声与单桨的离散噪声分量最大的区别是其噪声源项本身也是非定常的。为此,Hanson 认为在指定干扰频率下,干扰噪声也是由指定模态载荷引起的,即对非定常载荷首先进行了频域分解(谐波升力Lk及谐波阻力Dk),在此基础上给出共轴对转螺旋桨干扰噪声远场计算公式。假设,k=n2B2-n1B1(n1和n2为前、后桨旋转速度)为共轴对转螺旋桨干扰噪声旋转模态的谐波数,Parry等[77]利用渐进展开法,进一步简化了频域噪声公式,使螺旋桨的频域噪声公式得以在共轴对转螺旋桨干扰噪声得到应用,目前其研究的重点是如何通过不同的载荷模型对频域内的载荷(CLk和CDk)进行更好的模化。Kingan 和Parry[78-80]近年来对共轴对转螺旋桨后桨发出的桨尾迹干扰噪声进行了研究,结果表明,对转桨后桨的干扰噪声在后桨的后掠中并非是始终降低的,而是可能会增大。
魏宗智[81]将共轴对转螺旋桨干扰噪声快速预测方法与唐智浩给出的对转螺旋桨片条理论相结合,提高了共轴对旋桨气动噪声预测精度。虽然频域噪声预测方法在工程领域中应用非常广泛,但是其主要针对螺旋桨的离散噪声分量,同时在频域公式的推导过程中噪声源项也进行了简化。为了对共轴对转螺旋桨的干扰噪声进行更准确的研究,就需要使用时域方法对FW-H 方程进行求解。其中,最著名的时域方法就是Farrassat[82]提出的延迟时间解法。
Farrassat 通过声音传播的延迟时间方程,得到了FW-H 方程关于延迟时间的解,即:
式中:x为观察点(麦克风)位置;y(τ)为声源的位置;t为观察点接收声音的时间;τ为声源波的发射时间(延迟时间)。
目前,时域噪声预测方法被广泛应用于螺旋桨噪声机理研究中。Pagano等[83]对P180 机翼-机匣构型的螺旋桨的离散噪声和宽频噪声进行了数值模拟研究,通过考虑了叶片在流场中的弹性变形的CFD 计算,得到了螺旋桨叶片表面的非定常压强分布,然后利用Farassat等[82]提出的FW-H 方程时域解,对螺旋桨的远场离散噪声分量进行了预测。美国NASA-Glenn研究中心的Zante 和Envia[84]通过商用软件Numeca,对标准对转螺旋桨模型进行了非定常模拟,并把非定常流场计算结果代入软件LINPROP 和QPROP 中进行了对转桨气动噪声预测,该方法的预测结果与试验结果符合得较好。
在混合噪声预测中,对于近场声源面的选取,早期只能采用不穿透面作为声源积分面(如螺旋桨桨叶表面)[75]。Peters 和Spakovszky[45]对积分桨叶表面进行了研究,在计算指定区域内的声源时,首次分离了对转桨后桨的桨迹干扰噪声与桨涡干扰噪声的贡献(图38),通过该方法可以对共轴对转螺旋桨的各类噪声分量进行定性的研究。不过需要指出的是,由于只是对桨叶径向不同区域进行积分,该方法对于噪声分量的分离是比较笼统的。
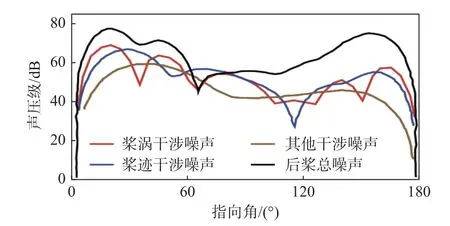
图38 不同声源在对转桨噪声指向性上的贡献[75]Fig.38 Noise contribution of different noise sources of CRPs[75]
近年来,也出现了采用穿透面上的声源[72]对共轴对转螺旋桨气动噪声进行预测的方法,这样可以在计算中包含以桨叶积分面进行噪声计算时忽略的四极子噪声贡献。Giauque等[85]通过自研代码elsA 对跨声速对转桨的噪声面选取问题进行了研究,讨论了CFD 网格密度和噪声源积分面大小的选择对远场噪声的影响(图39),研究表明,选取积分面越大,远场噪声预测值的收敛性越好。Delattre 和Falissard[61]分析了穿透声源面与桨叶表面对远场噪声的影响,证实了在低速情况下采用桨叶表面作为远场噪声预测的声源面是足够的(图40)。
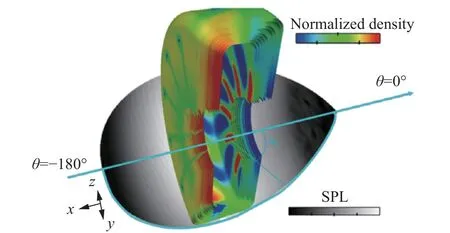
图39 共轴对转螺旋桨远场噪声预测中近场声源面的选取[85]Fig.39 Choice of the noise source surface in the hybrid aeroacoustics simulation of CRP[85]
图40 桨表面声源面与穿透式声源面[61]Fig.40 Solid noise source surface and penetrate noise source surface of CRP[61]
孙晓峰等[86]在20 世纪80 年代末就对共轴对转螺旋桨的非定常载荷噪声开展了理论研究,研究表明,对转桨的轴向噪声主要由桨上非定常载荷噪声决定,而桨平面内的噪声则由前、后桨的定常载荷噪声决定。随着我国大型运输机发动机的发展需求增强,国内各科研机构也对共轴对转螺旋桨的气动噪声预测方法开展了研究。例如,考虑到Lighthill 声类比法无法对近场声传播进行模拟,金海波等[87]在CFD 模拟的流场基础上,尝试使用Mohring 声类比法对共轴对转螺旋桨气动噪声进行了预测,并证实了这一方法的合理性。不过,虽然Mohring 声类比法可以对共轴对转螺旋桨的近场噪声进行预测,但其需要额外划分一套适用于声学计算的声学网格并对其进行求解,这就导致该方法的计算时间较长。为了减少螺旋桨附近非定常流场的计算时间,崔盼望等[88]通过非线性谐波方法对N-S 方程进行求解,完成了共轴对转螺旋桨的计算,并通过FW-H 方程对远场噪声进行了预测。非线性谐波方法不需要对螺旋桨在整个时域空间内进行求解,只需要对流动主要模态进行求解,这就大大缩减了共轴对转螺旋桨气动噪声预测过程中的时间消耗。随后,崔盼望等[89]又通过该方法研究了桨叶数量对共轴对转螺旋桨气动噪声指向性的影响,结果表明,在增加前桨桨叶数量的同时降低其转速,可以大幅度降低共轴对转螺旋桨在桨平面附近的噪声(参见图41 中F9_A6_1 组的数据,图中各组具体工况见表1)。
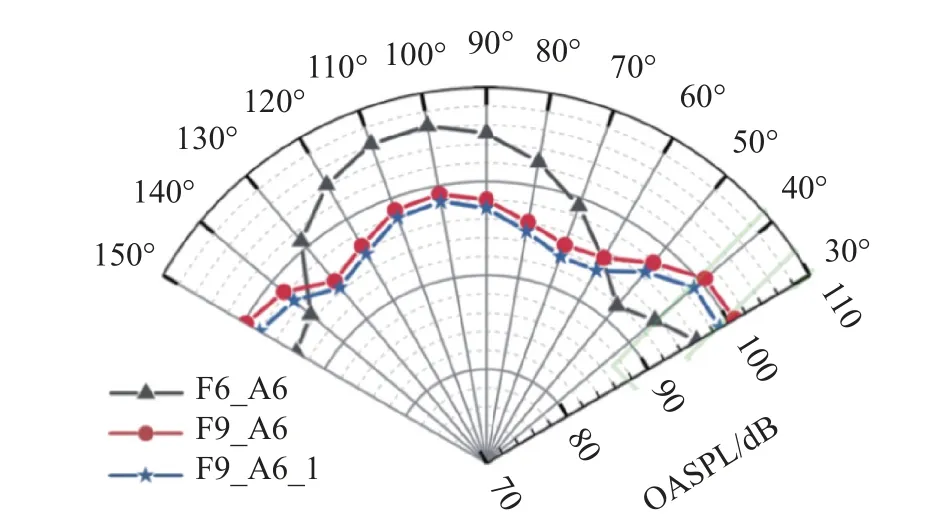
图41 不同桨叶数量对共轴对转螺旋桨噪声指向性的影响[89]Fig.41 Effect of front blade number on the OASPL of CRPs [89]
应当指出,即使不考虑非定常模拟的计算消耗,通过时域方法对远场噪声进行预测,本身的时间消耗也很大。为了解决这一问题,束王坚等[90]提出了一种基于非定常模拟结果的共轴对转螺旋桨远场噪声频域预测方法。该方法可以直接得到指定频率下的干扰噪声而不需要对时域噪声进行计算,因此大大缩减了噪声预测时间。同时,通过与时域算法的对比,证实了该方法在对转桨远场噪声预测中的准确性(图42)。
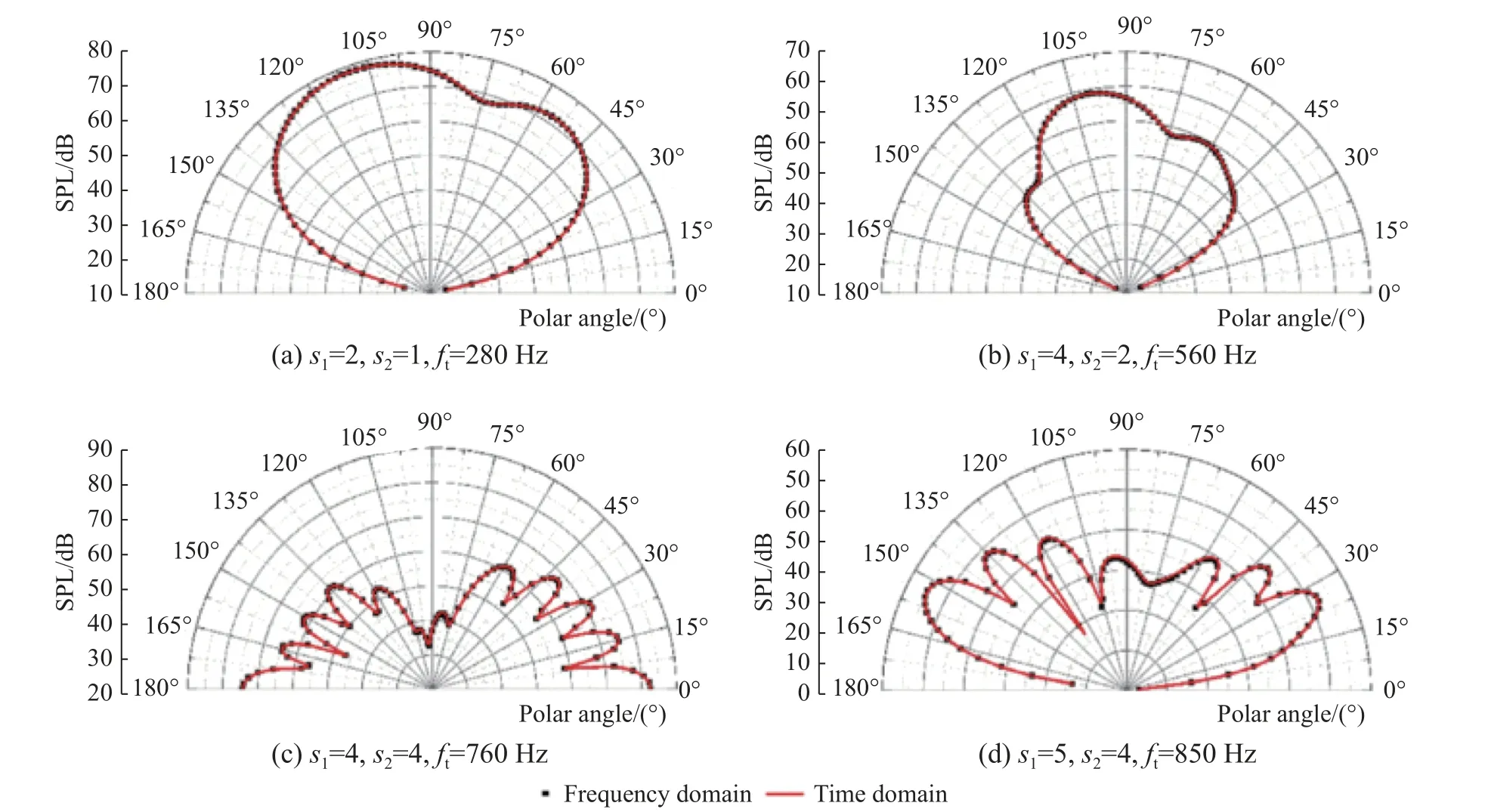
图42 新频域方法[90]与时域方法的结果对比[82]Fig.42 Comparision of the new frequency-domain method with time-domian method [82]
通过N-S 方程求解器对共轴对转螺旋桨近场流动特性进行求解后,再通过声学类比法对远场噪声进行预测的方法目前广泛应用。其中,通过N-S 求解器进行近场求解的优点主要是其发展比较成熟、完善,具备成熟的开源计算平台和商业软件等。同时,贴体网格可以更准确地对螺旋桨桨叶边界层进行模拟。尽管如此,这一方法仍然存在着一些实际应用难题[4]。这是因为,通过混合噪声预测方法对远场噪声进行高精度预测的基础仍然是近场CFD 求解器精度,这就需要通过高阶数值方法对螺旋桨附近的流场进行高精度的求解。然而,共轴对转螺旋桨的非定常模拟需要使用滑移网格交界面来对前、后桨区域进行连接,这就对交界面上的网格量、信息传递算法的精度、非定常时间步的大小都提出了非常高的要求。传统的非定常N-S 求解(URANS)受限于其并行效率,因此需要消耗大量计算资源和时间来达到如此高的求解精度以及气动噪声模拟中需要的非常小的时间步。
相比之下,格子玻尔兹曼方法(LBM)在大规模并行计算中的高效率以及对小扰动捕捉上的低数值耗散等特点,使得其非常适合气动噪声预测的小时间步长及高精度模拟需求[91]。BGK 格子玻尔兹曼方程为[92]:
其中:fi(x,t)为格子点x上在t时刻对应于第i个方向上的粒子密度分布函数;ξi为i方向上的粒子迁移速度;δt为粒子运动的单位时间步长(格子时间);τ为豫驰系数,代表了粒子相互碰撞的剧烈程度,表征了气体分子的黏性。玻尔兹曼方程的本质就是认为格子点上的粒子在碰撞过程中不断地向平衡态(x,t)演变后迁移至附近点的过程。
由于LBM 方法采用笛卡尔网格对空间进行离散,同时采用的离散速度模型具备对称性(如D2Q9),使得其在计算小扰动时的数值耗散与色散都非常低[93]。因此,LBM 被认为是非常有潜力的CAA工具[94]。随着滑移网格边界[95]以及应用于壁面的多级网格加密技术[96]在体积形式格子玻尔兹曼方程[97]的成功应用,格子玻尔兹曼方法已经被成功地应用于大雷诺数、跨声速飞机计算[98-99]以及旋转机械[100-102]的气动噪声预测领域。Romani等[103]通过基于LBM的商用软件PowerFlow,对带机身的涡扇发动机叶片进行了高精度模拟,研究了机身边界层被吸入涡扇发动机对发动机远场噪声产生的影响,还对低雷诺数旋翼螺旋桨的气动噪声进行了预测,并对叶片锯齿形状对低雷诺数螺旋桨的宽频噪声分量的影响进行了研究。Casalino等[100,104]通过LBM 对二叶旋翼螺旋桨流场进行了高精度模拟(图43),并与试验测量的离散噪声及宽频噪声分量分别进行了对比。
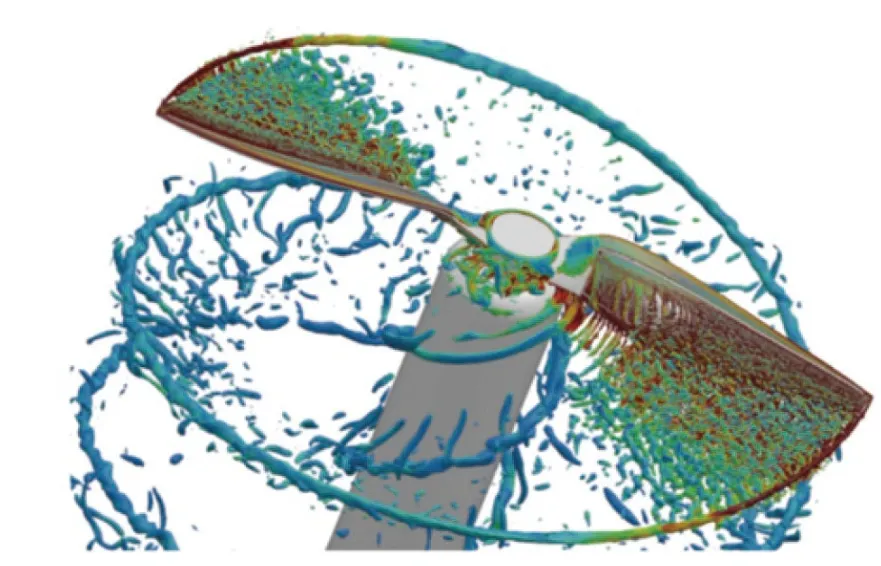
图43 LBM 仿真得到的旋翼螺旋桨涡量等值面[100]Fig.43 Vorticity surface of rotor by LBM[100]
相比于体积形式的格子玻尔兹曼方法,传统格子玻尔兹曼方法的计算速度更快、实施更简单,不过其整体发展速度较体积形式的LBM 稍显缓慢。近年,吕昌昊等[105]通过将非平衡态外推方法扩展至(旋转体在相对参考系内计算所需要的)滑移网格算法,对螺旋桨模型进行了数值模拟,并且与风洞测量的离散噪声分量取得了良好验证。
为了应用滑移网格算法,需要将计算域划分成转、静两个部分,如图44 所示。在静域中不存在惯性力,因此其中的单位质量力A(x,t)为0。旋转域中则存在着由于旋转引起的依赖于网格点空间位置的旋转惯性力,即
图44 滑移网格算法[105]Fig.44 Grid of sliding mesh method[105]
其中:Ω(x,t)为动域的旋转角速度;r(x,t)为旋转中心与任意网格点之间的距离。
虽然该方法成功地将传统LBM 扩展至螺旋桨数值模拟中,然而传统LBM 中的多级网格加密方法需要保持桨叶附近加密区包裹整个螺旋桨表面,这在包含两个螺旋桨的共轴对转螺旋桨数值模拟中带来的网格消耗是极其巨大的。为了克服这一难题,吕昌昊等[106]提出了适用于壁面多级加密的混合加密方法,并与滑移网格方法相结合,实现了共轴对转螺旋桨的高精度数值模拟。
图45[105]给出了共轴对转螺旋桨子午面上的速度散度分布,和通过二阶速度梯度张量不变量(Q准则,Q=10 000)提取的螺旋桨桨尖涡,以及尾迹涡系的等值面随时间的发展。在子午面上可以看到,数值模拟对声波进行了非常清晰的捕捉。同时,后桨桨尖区域的压强波动明显强于前桨桨尖区域,这也说明后桨是共轴对转螺旋桨的主要噪声源[107]。该LBM 模拟对前桨的桨尖涡及尾迹都都进行很好的捕捉,这为后续的共轴对转螺旋桨气动噪声机理研究奠定了基础。
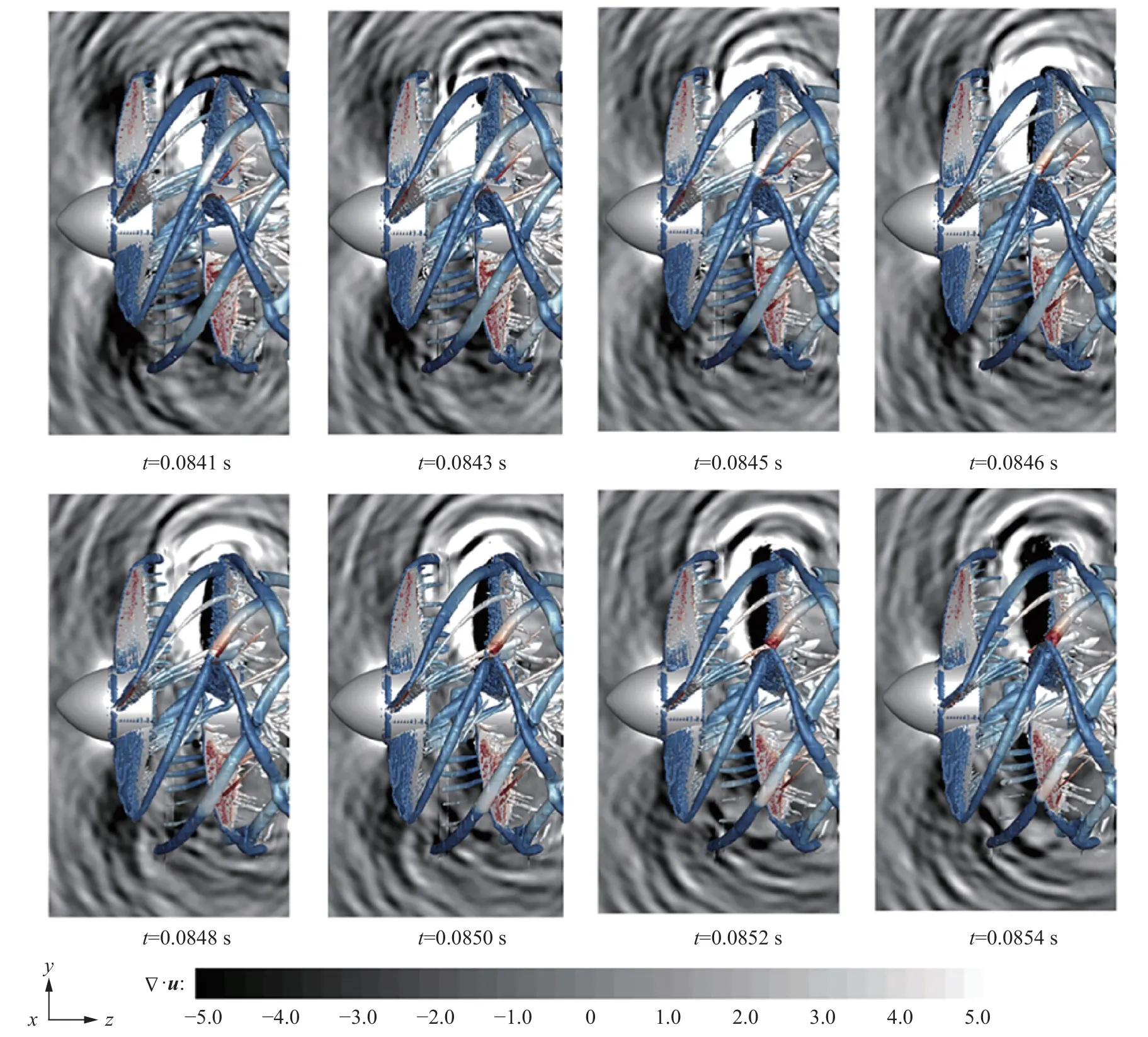
图45 LBM 仿真中不同时刻下共轴对转螺旋桨子午面上的近场声波及涡系分布[105]Fig.45 Instantaneous ∇·u contours on the meridian plane and major vortical structures of flow over the CRPs at various blade passing periods [105]
图46 给出了各个螺旋桨以及整个共轴对转螺旋桨,在距离原点10D的半圆上总声压级(OASPL)的远场噪声指向性。可以看出,在不同的指向角度上,整个共轴对转螺旋桨的OASPL 都是由后桨主导的。图46(b-c)展示了在0~800 Hz 频率范围内、方向角ψ=0°~180°的前、后排螺旋桨的SPL 频谱图,可以看出,前桨噪声的主要分量在频率f<300 Hz 范围内,而后桨噪声则是在相对较高频率范围内(300 Hz<f<700 Hz)仍然可以观察到显著的干扰噪声分量,尤其是在上游(ψ<60°)和下游(ψ>130°)区 域。图46(d-g)为前、后桨主要噪声分量的指向性,可以看出,上游和下游处的噪声由干扰噪声的BPF1+BPF2 分量主导。而在接近桨平面的方向上(ψ≈90°),前、后桨的总声压级分别由各自的独立噪声BPF1 和BPF2 主导,如图46(d-e)所示。这就说明,共轴对转螺旋桨的远场噪声在桨平面附近表现为单桨噪声特性,而在上、下游位置表现为干扰噪声特性。这与孙晓峰等[86]的理论研究结果是一致的。
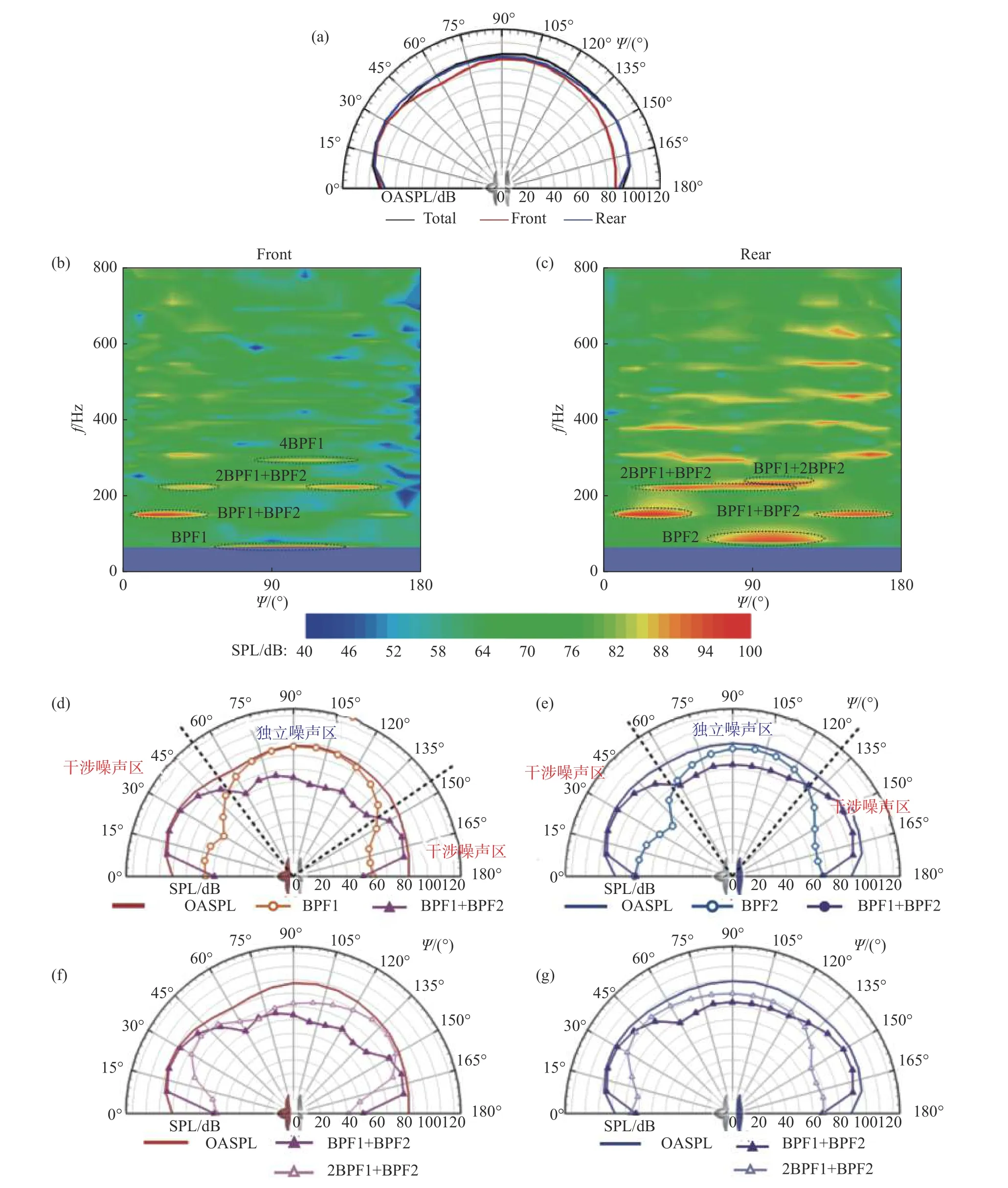
图46 共轴对转螺旋桨远场噪声指向性Fig.46 Noise directivity of Counter Rotating Propeller
5 共轴对转螺旋桨气动及噪声的优化设计
在初步设计完成后对螺旋桨进行优化,通常可以进一步改善螺旋桨气动及噪声特征。Betz[108]提出的最小能量损失条件一直是单排螺旋桨优化设计的基础,这一条件认为:对于给定拉力或功率指标的螺旋桨,当其滑流以一个固定的螺距向后运动,则其滑流能量损失最低、气动效率最高。不过严格意义上讲,Betz 条件并未考虑流体压缩性及翼型损失等影响。
随着螺旋桨设计日趋精细化,为了进一步提高螺旋桨的气动效率,多种优化方法被用于螺旋桨优化设计。螺旋桨的优化设计就是采用优化算法对大量螺旋桨气动、噪声评估结果进行采样,然后根据优化目标找出最优几何参数的过程。目前螺旋桨气动、噪声优化中常用的优化算法包括:梯度优化算法、启发式优化方法、基于代理的优化方法。基于梯度的方法是一种非常有效的基于梯度信息搜索最优解的方法[109-111],该方法利用伴随法求解梯度,寻优效率很高。但梯度优化算法的优化结果很容易陷入局部最优解,导致优化结果不理想。相比之下,模拟退火[112]、粒子群优化[113]、蚁群算法[114]和遗传算法[115]等启发式优化方法可以在整个设计空间内找到全局最优解。但是启发式优化方法的收敛速度普遍较慢,计算效率较低。为了在合理的时间内获得全局最优解,人们提出基于代理的优化方法。常用的代理模型包括径向基函数(RBF)、Kriging、支持向量回归(SVR)和深度神经网络(DNN)等。
除了优化算法,螺旋桨的气动、噪声预测方法也决定了螺旋桨优化的速度与可靠性。最初,受计算速度的影响,螺旋桨的优化主要是低阶优化。即,通过工程快速算法对螺旋桨气动及远场噪声进行预测而完成的优化。Mendoza[116]采用结合动量叶素理论的优化算法完成了单排螺旋桨的气动优化。潘杰元等[117]采用螺旋桨的片条理论对单排螺旋桨的弦长及扭角进行了气动优化,结果表明,基于片条理论的优化可以较快获得气动特性更佳的螺旋桨叶片。Gur和Rosen[118]通过片条理论及Hanson 的螺旋桨频域噪声预测方法,对单排螺旋桨的气动、噪声进行了一体化优化,结果表明,其方法的优化时间较高精度优化可降低30%左右,因此目前该方法广泛应用于螺旋桨气动、噪声一体化优化设计中[119-120]。低阶优化的最主要优点就是样本采集速度快,因此可以在更大的范围内对螺旋桨几何参数进行优化。然而,由于低阶气动、噪声预测方法存在结果准确性的问题,由此可能会导致优化结果的可靠性下降。
随着计算资源的提升,近年来螺旋桨优化逐渐向高阶优化发展。高阶优化就是在优化的过程中,采用CFD 对螺旋桨的气动进行评估并通过声学类比法对其噪声进行预测,因此优化结果可靠性更高。国内在单排螺旋桨的气动、噪声优化方面开展了许多工作。螺旋桨高阶优化的一个主要问题就是对于螺旋桨这样的复杂构型,在优化过程中随着桨叶参数的变化,螺旋桨的网格需要自动重新生成。白俊强课题组[121]就针对优化过程中螺旋桨桨距角的变化,在桨叶附近采用自由变形网格技术,完成了网格的重新划分,并结合螺旋桨噪声的频域预测方法,对单排螺旋桨的远场噪声进行了优化。王可丽等[122]利用这一方法,对高空无人机的单排螺旋桨的气动力进行了优化,结果表明,在考虑机翼影响的情况下,优化可使螺旋桨效率提高2.8%。高阶优化的另一个问题就是螺旋桨的高精度模拟计算的计算资源消耗非常巨大,会导致优化时间历程变长。为此,Mian等[123]采用低阶-高阶结合的优化方法对单排螺旋桨进行了气动优化,在优化过程中,首先采用低阶进行样本计算,随后通过高阶算法对螺旋桨几何参数在限定范围内进行优化,这种方法不仅具备低阶优化采样的速度快的优点,同时通过高阶优化对低阶结果进行修正,提高了优化结果的可靠性。近期,耿欣等[124]利用DNN 映射叶片参数与气动/气动声学性能之间的非线性关系,通过深度确定性策略梯度(DDPG)强化学习算法,实现了低阶至高阶的单排螺旋桨气动噪声优化。
相较于单排螺旋桨,共轴对转螺旋桨的几何及运动参数组合更多、更复杂,因此其优化过程所需的时间更长。目前,关于共轴对转螺旋桨优化研究的公开文献较少。德国宇航院DLR 的Schnell等[60]通过URANS 结合时域FWH 的预测方法,对共轴对转螺旋桨的气动噪声进行了优化,结果表明,由于共轴对转螺旋桨干扰噪声分布于整个指向性范围内(如图22d-f 所示),优化过程很难确保整个指向性内的噪声均下降,因此共轴对转螺旋桨的气动噪声优化通常是针对某一特定麦克风位置进行的。Stürmer等[125]随后完成了共轴对转螺旋桨的气动、噪声一体化优化,优化结果与试验结果符合得较好,其中,为了降低整个优化过程的时间消耗,共轴对转螺旋桨的气动评估是通过定常CFD 完成的。Grasso等[126]也通过该方法对共轴对转螺旋桨进行了气动、噪声一体化的优化,但是其仅对上游单一麦克风接收到的干扰噪声进行优化,结果表明,前、后桨桨尖距离的增大有利于降低干扰噪声。
6 结论
共轴对转螺旋桨虽然在气动方面确实优于单排螺旋桨,但其气动噪声问题比单排螺旋桨突出。本文介绍了共轴对转螺旋桨的组成及其应用,并梳理了共轴对转螺旋桨气动、噪声设计研究进展。总结如下:
1)共轴对转螺旋桨气动试验方面。试验结果表明,共轴对转螺旋桨的整体气动力对前、后桨的桨距角以及转速搭配并不敏感。同时,当对转前桨、后桨间距离不是非常大时,改变前、后桨间的距离对于气动力的影响并不大。在高空飞艇推进系统方面,刘沛清课题组率先开展了共轴对旋螺旋桨高效推进系统研究,并针对高空飞艇低雷诺数、小前进比的工况进行了一系列试验测量,发现低雷诺数共轴对转螺旋桨的气动效率仍然较单排螺旋桨有所提升。
2)共轴对转螺旋桨的气动噪声试验方面。利用声学风洞基于波束成形的声源定位技术,证实了共轴对转螺旋桨的干扰噪声声源径向位置符合频域公式中提出的马赫半径的位置。从降低干扰噪声考虑,可以通过前、后桨叶数量相等且桨叶数量尽量多的旋转桨叶来降低远场干扰噪声辐射。近年来的共轴对转螺旋桨气动噪声试验证实了对转桨干扰噪声声源位置与干扰噪声角模态相关,并有学者提出了低噪声设计的指导理念,该理念被证实是可行的。
3)共轴对转螺旋桨的气动设计方面。片条理论是螺旋桨气动计算快速、有效的方法,对螺旋桨气动设计非常重要。近年来,刘沛清等在单桨片条理论的基础上,针对共轴对转螺旋桨提出了三条基于小扰动线化理论的假设,推导了针对共轴对转螺旋桨的片条理论,并在北京航空航天大学D5 风洞中进行了试验验证。这一方法与早期共轴对转螺旋桨片条理论相比,明显提高了计算精度。
4)共轴对转螺旋桨高精度数值模拟方面。CFD 模拟技术是对其绕流特征进行高精度预测的重要手段。为了克服共轴对转螺旋桨桨叶几何形状复杂以及前、后桨之间的强烈流动剪切作用等因素引起的模拟困难,目前主要通过引入浸没边界法以及重叠网格方法等模拟手段来提高计算精度。
5)共轴对转螺旋桨气动噪声数值模拟方面。与直接气动噪声模拟相比,CFD 结合FW-H 的混合噪声预测方法是目前运动部件远场噪声预测最有效的方法。在频域法中,螺旋桨噪声公式成功地将螺旋桨远场噪声分为螺旋桨厚度噪声、载荷噪声和四极子噪声分量。为了提高预测精度,耿欣等将共轴对转螺旋桨干扰噪声快速预测算法与共轴对转螺旋桨片条理论相结合,获得了成功。在时域方法中,Farrassat 给出FW-H 方程积分式在延迟时间上的解。针对共轴对转螺旋桨气动噪声时域预测,考虑到高精度URANS 计算资源消耗及耗时过大,吕昌昊等在传统LBM 算法的基础上,提出采用滑移网格法和桨叶壁面局部加密法实现了高精度模拟。
6)共轴对转螺旋桨气动噪声优化设计方面。目前基于梯度的方法、启发式优化方法、基于代理的优化方法等成熟的优化方法已经被广泛应用于单排螺旋桨的优化过程中。同时,在基于气动及噪声的快速预测方法的单排螺旋桨快速优化研究中,已经证实了这类方法在单排螺旋桨设计过程中的有效性。为了进一步提高优化结果的可靠性,优化算法结合高精度气动、噪声预测方法的高阶优化方法也已经在单排螺旋桨气动、噪声一体化优化过程中成功应用。相较于单排螺旋桨,共轴对转螺旋桨由于气动、噪声机理更加复杂,因此其优化需要通过高阶方法来进行。同时,由于对转桨在整个方位角上的噪声指向性都比较大,很难完成全观测范围内的气动噪声优化。因此,目前关于共轴对转螺旋桨气动噪声的优化需要针对某一特定的指向性位置进行。
综上所述,虽然各国科研人员对共轴对转螺旋桨的气动力、气动噪声、气动设计、高精度格式、噪声模拟及优化进行了大量的工作,但是,为了使共轴对转螺旋桨成为真正具有竞争力的发动机构型,针对共轴对转螺旋桨的气动及噪声开展更多、更深入的研究仍是非常必要和迫切的。首先,真实螺旋桨起降过程中桨叶承受巨大的气动载荷,会造成桨叶几何外形的变形。该现象对共轴对转螺旋桨的气动及噪声的影响显然不能忽略,因此需要对考虑气动弹性问题的共轴对转螺旋桨进行研究。其次,目前关于共轴对转螺旋桨噪声的研究主要集中在其离散噪声的研究上,随着研究的深入,应当对共轴对转螺旋桨的宽频噪声进行进一步的研究。再次,虽然目前关于共轴对转螺旋桨气动噪声的研究主要集中在起飞阶段,然而为了最终实现在商用航空上的应用,其巡航状态下的气动噪声表现同样应该被关注。最后,针对共轴对转螺旋桨气动噪声巨大这一显著缺点,对其进行针对性的被动降噪研究在其最终应用的道路上是不可或缺的一环。