大尺寸自由活塞激波风洞重活塞软着陆关键技术
2023-11-05谌君谋易翔宇孙日明毕志献
谌君谋,陈 星,易翔宇,孙日明,纪 锋,毕志献
(中国航天空气动力技术研究院,北京 100074)
0 引言
航天飞行器在大气层中以超过3 km/s 的速度(高速)飞行时,飞行器周围气体受到激波压缩和黏性阻滞作用,会产生数千甚至上万度的高温[1-2],引起气体分子振动能激发、离解甚至电离,气体分子的物理属性和流场特性发生显著改变,这成为高速飞行器设计需要重点考虑的因素之一[3-6]。高速流动机理认识的不足,使得高温多物理场耦合、目标特性和超燃推进等物理建模不尽合适,导致数值计算存在诸多不确定性,因此通过试验来研究高速流动规律十分重要[1,5]。高焓激波风洞是研究高速流动和高温气体效应的主要地面模拟设备之一,可为高速飞行器研究提供支撑。
高焓激波风洞驻室的总焓和总压水平是由驱动技术决定的[5-6]。高性能驱动方式主要有电加热、爆轰加热、自由活塞压缩加热轻质气体[2,4,7]。电加热驱动代表性风洞为美国Calspan 大学LENS I 和LENS II[8]等高焓激波风洞。中国科学院力学所JF-10[4]、美国NASA 兰利研究中心HYPULSE[9]和德国亚琛工业大学TH2-D[10]等高焓激波风洞采用爆轰驱动方式。澳大利亚昆士兰大学T4[11]、美国加州理工学院T5[12]、英国牛津大学T6[13]、德国宇航中心HEG[14]、日本宇航中心HIEST[15]和中国航天空气动力技术研究院FD-21[16]等高焓激波风洞采用自由活塞压缩驱动方式,产生强入射激波。从参数模拟能力、安全性、工作效益和技术风险等方面对比分析[2,4-5],发现自由活塞加热驱动技术具有最大的性能和运行灵活性,因而被大量应用于高焓激波风洞中。
1959 年,Stalker 在加拿大渥太华国家研究理事会上提出并演示了自由活塞驱动的高焓激波管。随后,Stalker 为了验证重活塞的驱动能力和可控性,在澳大利亚国立大学主持建造了T1 和T2 先导性风洞。1966 年,Stalker[17]第一次实现重活塞调谐操作,但这一概念在1990 年才由Hornung 和Belanger[18]完成理论分析。Hornung[19](1989)、Beck[20](1991)、Labracherie[21](1992)等研究了定压驱动时间、压缩比、高压储气室容积等参数对活塞速度和压缩管末端压力的影响。徐立功[22](1994)、Itoh[23](1998)、朱浩[24](2014)、李海燕[25](2016)、易翔宇[26](2020)和谌君谋[27](2021)等完善了理论条件下调谐操作活塞发射器需要满足的条件和范围。吕治国[28](2016)、Tanno[29](2016)、Andrianatos[30-31](2016、2017)、Stennett[32](2017)、孙日明[33](2020)、谌君谋[27](2021)等研究了自由活塞高焓激波风洞非理想运行条件下的状态维持和损伤防护的措施,包括活塞发射方式优化、减振及隔振、重活塞刹车和缓冲等。为了减小重活塞加速时间进而限制重活塞运行速度,压缩管长度不能太长,例如世界上第二大尺寸的HIEST 风洞[15]压缩管内径为600 mm、长度为42 m,同时为了便于重活塞止停,大部分自由活塞驱动的高焓设备压缩管内径D与激波管内径d的管径比满足D/d>3[6]。然而,较短的压缩管会导致驱动能力受限,而较小内径的激波管则会限制喷管尺寸,从而使得试验段模型尺寸较小,影响风洞模拟能力。
大尺寸自由活塞激波风洞重活塞软着陆过程也称为调谐运行,其受到活塞发射机构发射效能、压缩管长度、压缩管与激波管的管径比、活塞止停机构等因素的限制,这些限制也是重活塞调谐运行需要解决的关键技术。本文根据自由活塞高焓激波风洞结构特点,着眼于保证重活塞安全软着陆的目标,结合理论分析、数值计算和风洞试验,解决了大尺寸重活塞止停难题,在FD-21 风洞中实现了质量205 kg、275 kg重活塞在最高速度分别超过350 m/s、450 m/s 工况下的调谐运行。
1 试验系统与测量方法
中国航天空气动力技术研究院设计的大尺寸FD-21 自由活塞高焓激波风洞,压缩管长度75 m、内径0.668 m,激波管长度35 m、内径0.29 m,图1 给出了活塞压缩器示意图。较大内径的压缩管使得活塞发射机构设计难度大、发射效能难以确认;压缩管长度长,使得重活塞加速时间长、最大运行速度快、运动动能大、与风洞碰撞导致的损坏危险大;压缩管与激波管内径管径比为2.3,较小的管径使得驱动气体流过激波管时间短,活塞“软着陆”控制难度增加。重活塞在运动的过程中如果以较大的速度撞击风洞,会对活塞甚至风洞洞体造成损害。针对活塞发射效能、重活塞与壁面摩擦、气体泄漏、膜片破膜压力等实际情况带来的重活塞安全问题,建立重活塞密封装置、重活塞测速系统、重活塞止停装置以及膜片破裂压力判定装置,修正重活塞理论预测程序和数值模拟参数,优化得到了适合大尺寸活塞软着陆的运行状态。

图1 活塞压缩器示意图Fig.1 Schematic of a piston compressor
1.1 高压储气室结构布置
高压储气室与压缩管布局有两种方式[28]:同轴式布局和背负式布局。同轴式布局结构相对简单,然而占用空间大,需要大尺寸快速开启阀,费用高,中小尺寸风洞采用此结构较多。背负式布局占用空间小,可以采用高压储气室的空气作为发射机构的驱动气源,虽结构复杂,但重活塞发射速度快,大尺寸风洞采用此结构较多。为了确保驱动气体可以快速推动活塞以及高压储气室与压缩管的连接处不形成声速导致喉道壅塞,高压储气室与压缩管之间连通管道的通气横截面积应大于压缩管的横截面积。活塞发射机构在起动时,连接高压储气室和压缩管的气动阀起动,气流流动过程中存在损失,一般而言,不同风洞的发射效能不同,需要对相应的发射效能进行评估。图2 为FD-21 风洞采用的活塞发射机构示意图[34]。

图2 活塞发射机构结构示意图Fig.2 Structural diagram of a piston launching mechanism
1.2 活塞速度测量
高压储气室发射效能和重活塞壁面摩擦,导致活塞运动与理论结果存在偏差,需要对活塞运动过程进行监控,修正理论模型。为了监控活塞的运动和压缩管压力的变化,在压缩管上安装一系列传感器。图3为FD-21 风洞压缩管传感器位置示意图[35],实际位置见表1,压力传感器对应符号为K,光电传感器对应符号为G,相同编号数字对应的位置相同。
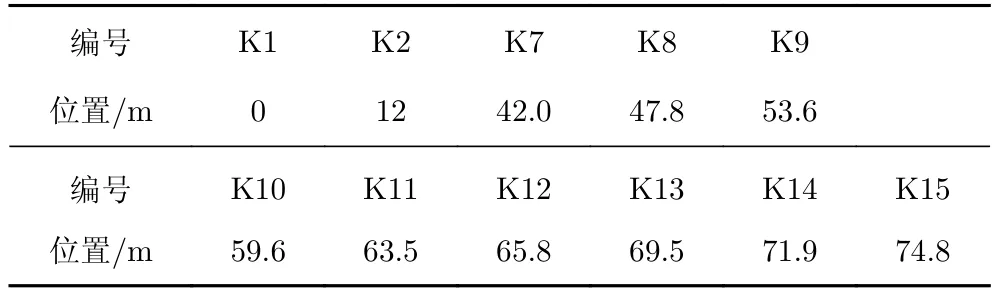
表1 压缩管传感器位置Table 1 Location of compression tube sensors

图3 压缩管传感器位置布置示意图Fig.3 Schematic diagram of compression tube sensors' locations
自由活塞高焓激波风洞实际调试和运行过程中,为了防止活塞与压缩管接触面处漏气以及减缓活塞直接摩擦造成的损伤,在活塞上安装密封环[27],密封环的材料为聚四氟。活塞的材料为硬铝,硬铝强度高、有一定的耐热性、成本低、综合性能好。低温条件下聚四氟环摩擦系数小,活塞刚开始运动时受到的阻力小;高温条件下聚四氟环摩擦系数增大,使得活塞在压缩管末端更容易停止,便于活塞的初始调试[36]。同时,聚四氟环的反光性好,便于活塞的测速。聚四氟环安装在活塞两端,还能起到密封效果,减少气体泄漏。
为进行活塞速度的监控,通过应用活塞表面处理技术、光纤传感器灵敏度调整、压力传感器复核校对、激光传感器防护测距、同步数据采集系统搭建等方法,设计了一套多传感器结合的活塞速度监测系统[33]。图4 为FD-21 风洞活塞外形及其速度测量示意图,在压缩管上安装了光电传感器测量活塞运动速度。试验过程中,为了防止气流升温等因素造成光电传感器信号的误采集,一般在光电传感器对称位置安装压力传感器进行校准。图5 为光电传感器测量得到的活塞经过光电传感器的信号。图5(a)为一次试验条件下测量的光电信号,活塞经过时,信号发生突变。活塞上有两个聚四氟环,经过光电传感器时,发生了两次明显反射,见图5(b)。读取两次信号升高时的时间差Δt以及对应的活塞距离L1,获得活塞运行的速度U=L1/Δt。

图4 活塞外形及速度测量示意图Fig.4 Piston shape and velocity measurement
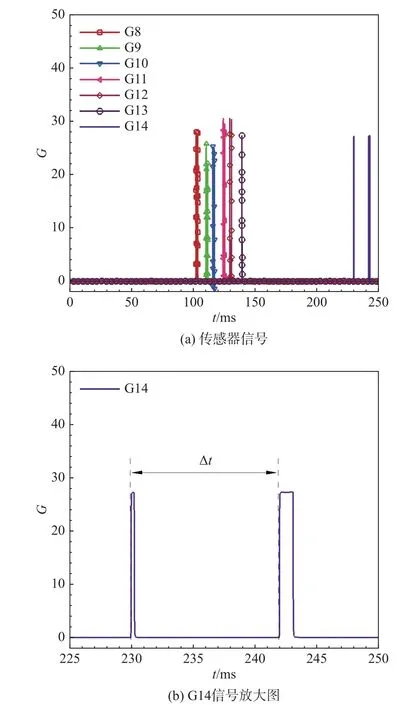
图5 压缩管上光电传感器测量的信号Fig.5 Signals measured by photoelectric sensors on compression tube
1.3 止停机构结构设计
除了气动参数的合理选择外,对于大尺寸自由活塞高焓激波风洞,还可采用多种办法实现活塞的软着陆:1)为了防止活塞反弹造成对活塞和风洞的撞击损伤,可以在活塞上安装刹车装置;2)在压缩管末端安装尼龙、聚氨酯或硅橡胶等缓冲装置,或者采用气动止停装置,吸收活塞剩余的动能。对于FD-21 风洞,结合活塞自身结构,设计了最大耐冲击速度为100 m/s的两级缓冲止停机构(图6),利用活塞自身结构与止停缓冲结构之间形成气室,依靠压缩空气实现缓冲气垫,随后利用止停机构本体弹性体和非金属弹性材料共同作用吸收冲击载荷,而风洞洞体结构采用全浮动设计可以有效减小冲击载荷影响。
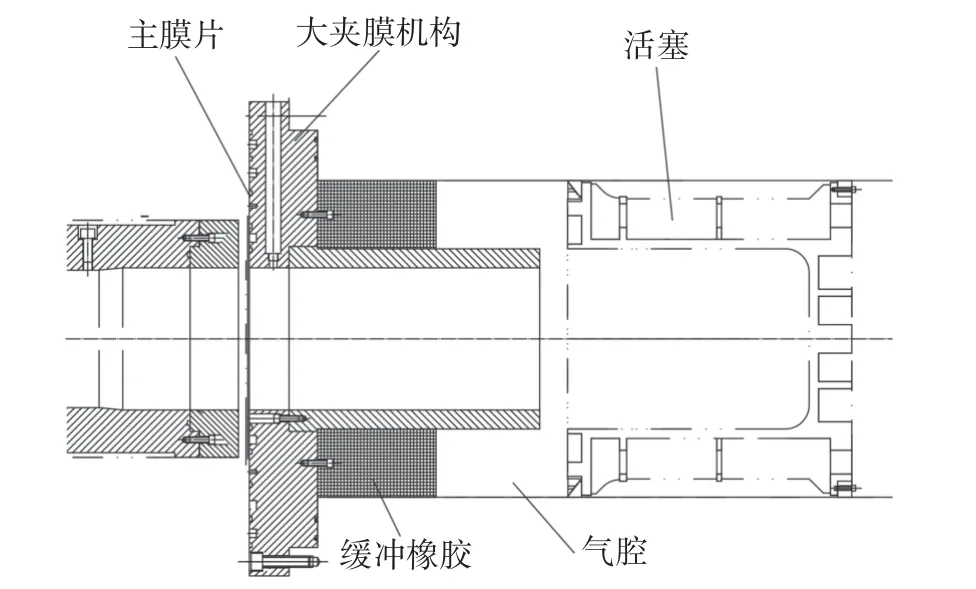
图6 止停机构Fig.6 Stop mechanism
1.4 膜片破膜压力判定
获取准确的膜片破膜压力是活塞实现调谐运行的关键,特别是主要依靠气动止停的重活塞。膜片的破膜压力影响活塞发射器初始参数的设置,判定准确的破膜压力对活塞和风洞本体的安全性至关重要。活塞运动到压缩管末端时,驱动气体被压缩后其压力和温度急剧升高,导致膜片破裂。膜片破裂后,由于活塞运动和压缩管末端波系的作用,压缩管总压信号不会立刻发生明显变化,导致压力传感器不能即时精确判断膜片破裂压力。根据静态破膜压力和材料的性能,采用经验型Johnson-Cook 模型[37],预估膜片的动态破膜压力[26]。图7 为静态破膜示意图,将膜片放置在大夹膜机构一侧,另一侧堵上盲板,通过充气管路对大夹膜机构进行充气。

图7 膜片静态破膜示意图Fig.7 Schematic diagram of diaphragm static rupture
采用膜片破裂探测装置判断膜片动态破裂情况,在膜片上粘贴漆包线,并依据信号的通断对膜片的打开状态进行判断[26]。图8 为漆包线在膜片破裂探测装置的分布示意图。动态破膜时,在大夹膜结构靠近激波管位置处堵上盲板,膜片则放置在靠近压缩管的一侧。当膜片受到高压气体作用发生较大变形时,漆包线断裂,对应的输出信号出现一个阶跃。膜片破裂时,之前断裂的漆包线由于膜片剧烈变化可能再次连接(为了增加膜片破裂后漆包线再次连接的概率,膜片上一般粘贴5~7 组漆包线),产生一个波动的阶跃信号(如图9 中的E01),此时压缩管末端传感器K16 出现一个压力波动,结合经验型Johnson-Cook 模型预估数值,可获得实际的动态膜片压力。根据此压力和活塞速度测量结果,判断实际的活塞压缩器性能。
图9 膜片动态破裂压力曲线Fig.9 Diaphragm pressure during a dynamic burst
2 物理模型与计算方法
2.1 自由活塞运动理论计算方法
对于重活塞运动,可以做如下假设[19]:1)活塞运动是准一维的;2)高压储气室容积无限大;3)驱动气体和高压储气室气体是绝热的。高压储气室初始压力为PR,0,容积为VR,0;压缩管初始压力为PC,0,长度为L,内径为D;激波管初始压力为Ps,长度为l,内径为d。风洞起动后,活塞受上游高压储气室高压气体压缩,向下游压缩管运动,如图10 所示。其中,PR、PC分别是膜片破膜前高压储气室和压缩管的压力,x是活塞下游面距离压缩管末端的距离,活塞在运动过程中受到的摩擦力为f。
图10 活塞运动示意图Fig.10 Schematic diagram of piston movement
根据膜片前后状态的变化,可以给出破膜前后活塞的运动方程。根据Hornung 无量纲方法[18-19],对活塞运动过程中前缘达到膜片距离x、活塞运动时间t、活塞速度u和驱动气体质量m进行无量纲化处理。无量纲参数分别是:
其中:aR,0为高压储气室气体初始声速;mC,r为驱动气体初始质量。
重活塞无量纲破膜前运动方程为:
重活塞破膜后的运动方程为:
破膜时的边界条件为:
当主膜片破裂之后,活塞的运动速度up,r刚好能补偿压缩管中流出的驱动气体,使得压缩管末端的压力为一个定值,这个运动速度为临界速度。临界速度无量纲表达式为:
无量纲活塞速度β为膜片破裂时活塞运动速度和临界速度之比,即:
对上述常微分方程组(4~7),采用 四阶Runge-Kutta进行积分,获得压缩管内的活塞运动特征以及破膜前后驱动气体压力变化过程。
2.2 数值方法
利用动网格模型数值模拟活塞在压缩管中的运动。对于运动边界的控制体,控制方程为轴对称非定常流动的Navier-Stokers 方程,无量纲形式为:
其中,U为守恒变量项矢量,
F、G分别为柱坐标下x、r方向的对流通量项矢量,
式中:u、v为速度矢量V的分量;ρ为气体密度;p为压力;(ud,vd)为控制体边界速度V在柱坐标下的分量;(τxx,τrr,τθθ,τxr)为牛顿黏性应力τ[38]的分量;(qx,qr)为热传导项q[38]的分量。对于空气,比热比γ=1.40;对于氦气和氩气,比热比γ=1.67。
对控制方程组的黏性项采用中心差分,对数值通量项采用通量差分分裂数值求解。采用MUSCL 差值方法,结合通量分裂和Roe 通量差分来构造无黏通量,无黏通量项和源项采用全部隐式处理,对无黏通量项采用LU-SGS 方法[39]进行迭代求解。时间离散方法采用四阶Runge-kutta 方法。采用Catris-Aupoix修正的SA 湍流模型[40]。
计算区域分为4 部分(见图11),Domain1 和Domain2 为高压储气室区域,Domain3 为压缩管区域,Domain4 为激波管区域。活塞在运动过程中,材料为聚四氟的摩擦环与压缩管壁面接触,聚四氟环与炮钢的摩擦系数为0.04。计算域沿轴向网格大小Δx=10 mm。主膜片附近进行网格加密,第一层网格大小Δxmin=0.01 mm,径向网格Δymin=0.01 mm。计算过程中,取时间步长Δt=1 × 10-6s。当主膜片壁面压力达到破膜压力后,主膜片“破裂”。此时,高压储气室中的主体部分Domain1 及同轴部分Domain2的压力为PR,Domain3 的压力为PC,主膜片破膜压力为PRup,活塞质量为mp,压缩管和激波管为流通区域,Domain4 的压力为PS。活塞壁面和压缩管壁面采用恒温壁条件,Twall=282 K。

图11 计算区域(单位:m)Fig.11 Calculation area (unit: m)
3 结果与讨论
3.1 调谐参数理论选择区间
选择只与初始参数相关的量b1和b2为自变量,定压驱动时间 τ和活塞的无量纲破膜速度β可由b1b2平面决定[19,26-27]。其 中,定压驱动时间 τ在b1b2平面存在局部极大值线,意味着定压时间的极值曲线通过b1b2平面与活塞速度的变化曲线一一对应,定压驱动时间 τ关于活塞的无量纲破膜速度β存在极值[24-26]。参数的设计点的选择应尽可能靠近极值曲线,由于活塞的无量纲破膜速度β较小,更容易靠近边界曲线,所有设计点应位于极值曲线外侧。为了增加定压驱动时间,膜片破裂后活塞的无量纲破膜速度β需要满足β>1,此时活塞对压缩管末端的空气继续进行压缩,其压力继续增加,来补偿压缩管末端压力的衰减。当β≤1 时,压缩管末端压力未达最大值。参照目前已有的自由活塞高焓激波风洞的设计,无量纲破膜速度β的范围为1.2~1.6,这个范围也适用于FD-21 风洞。对于FD-21 风洞,压缩管长度L与内径D的比值L/D(75/0.668)约为112,压缩管内径D与激波管内径d的比值D/d(0.668/0.29)约为2.3。为了获得可行的定压驱动时间,b1的范围为0.005~0.018,b2的范围为5~30(见图12)。
图12 压缩比λ=60 的定压驱动时间和活塞速度分布图Fig.12 Contours of constant pressure driving time and piston speed for compression ratio λ=60
3.2 活塞发射器运行评估
为了检验活塞运行性能、传感器测量精度以及相关的测试系统的工作状态,同时也为了验证研制的活塞运行程序的准确性,基于活塞和风洞运行的安全需求,在压缩管末端堵上盲板,采用不破膜方式进行风洞试验,试验状态见表2。表中,PR为高压储气室压力,气体为空气(Case1);PC为压缩管压力,气体为空气或者氦氩混合气体(Case2,氦气与氩气的质量比为2∶8)。

表2 不破膜状态下的活塞发射器运行状态Table 2 Running states of piston launcher without diaphragm rupture
活塞发射机构起动后,高压储气室的高压气体进入压缩管这一过程中,气体压力存在损失,加之活塞与壁面摩擦以及高压气体推动活塞有轻微的泄露,使得活塞实际运动曲线与理论值存在差别。当表2 的Case1 和Case2 的活塞发射机构的实际发射效能为70%(将高压储气室的压力设置为原来的70%)时,表3 中活塞运动速度-位移曲线和压缩管末端的总压曲线的理论值与测量值吻合。在已知发射效能条件下,理论模型可较好地预测活塞总体运行过程。图13和图14 分别为空气驱动空气和空气驱动氦氩混合气体的试验与计算结果对比图。在不同条件下,活塞的速度曲线(图13a 和图14a)及压缩管末端的总压曲线(图13b 和图14b)测量值与计算值吻合。在活塞驱动空气状态条件下,活塞的最大速度约为294 m/s,与空气在室温下的声速340 m/s 接近,会导致激波压缩。图13(b)中可以看出,在t=0.20 s 时,存在25 ms 稳定的压力平台,活塞压缩空气产生激波,出现激波压缩驱动气体的现象。在活塞驱动氦氩混合气体的条件下,活塞的最大速度约为273 m/s,氦氩混合气体质量比为2∶8 条件下的声速为529 m/s,随着气体压缩,温度逐渐增加,声速增加,总压没有出现明显的平台(图14b),可以近似认为是等熵压缩。

表3 调谐运行状态Table 3 Tuning operation condition

图13 不破膜条件活塞驱动空气曲线Fig.13 Velocity and pressure of the air drived by the piston without diaphragm rupture

图14 不破膜条件下活塞驱动氦氩气体曲线Fig.14 Curves of piston driving He-Ar gas mixture under the condition of no rupture of diaphragm
3.3 重活塞实际运动分析
根据一般的喷管驻室总温总压状态和对应的膜片实际破膜压力,考虑活塞发射机构的发射效能等因素,确定活塞发射器的试验状态[41],见表3,其中PRup为膜片破膜压力、PS为激波管试验气体初始压力。
图15 和图16 为活塞发射器压缩管末端压力和运动速度的测量值、理论计算值与数值模拟结果的对比曲线。测量值以压力传感器K2 上的信号为触发信号,因此理论计算和数值模拟曲线以压缩管G8 传感器采集信号为基准进行平移。实际运行过程中,由于光电传感器的信号易受烟雾、粉尘等影响产生干扰,因此在光电传感器的对应位置设置了压力传感器进行相互验证并监测管道内压力变化情况。表3 中的Case1 偏移时间为82.5 ms,Case2 的偏移时间为60 ms。为了匹配测量的活塞运动速度-位移曲线和压缩管末端的总压曲线,表3 的Case1 和Case2 的活塞发射机构的实际发射效能按照70%进行计算。理论曲线、数值模拟曲线与测量值的压力变化趋势符合较好,数值模拟结果和测量值有平稳的压力平台。这是因为Case1 的实际活塞运动速度最高超过350 m/s(图15b),Case2 最高超过450 m/s(图16b)。活塞压缩产生一系列压缩波,压缩波在传播过程中汇聚形成激波在压缩管末端来回反射,使得压缩管内压力有较大波动。定压驱动时间(压缩管内压力在最高压力的85%附近的时间)约为8~10 ms,可为激波管提供较为稳定的驱动压力。图15(a)和图16(a)中压缩管末端定压驱动压力为15 MPa 和45 MPa,对应的温度分别为3 450 K 和4 845 K。从图15(b)和图16(b)速度曲线可以看出,激波在活塞表面反射后,活塞表面压力提高,使得活塞突然减速,活塞速度曲线出现偏折,数值模拟结果与试验结果吻合。等熵压缩理论计算的速度曲线无法捕捉到这一现象,导致活塞末端速度理论值与测量值出现较大偏差。特别是Case2 条件,数值模拟结果显示活塞在到达压缩管末端之前,来自激波管中的反射激波抵达活塞面,对活塞速度起到更加显著的减速作用。

图15 PR=2.86 MPa、PC=30 kPa、mp=205 kg 条件下压缩管末端压力和速度曲线Fig.15 Pressure and velocity at the end of the compression tube under PR=2.86 MPa,PC=30 kPa,mp=205 kg

图16 PR=7.5 MPa、PC=38.5 kPa、mp=275 kg 条件下压缩管末端压力和速度曲线Fig.16 Pressure and velocity at the end of the compression tube under PR=7.5 MPa,PC=38.5 kPa,mp=275 kg
图17 为活塞两侧压力随时间的变化曲线。靠近大夹膜机构的一侧活塞表面(Front 面)压力先仅受到驱动气体压缩的作用,随后受到来自压缩管中反射激波的作用,压力增加。靠近高压储气室一侧活塞表面(Back 面)在初期活塞运动过程中,高压储气室的气体膨胀,压力逐渐减小,当活塞减速后,生成的压缩波使得Back 面压力增加。

图17 重活塞两侧压力Fig.17 Pressure on two sides of the heavy piston
图18 给出背负式布局的高压储气室不同区域的压力随时间的变化曲线。Line01 和Line02 分别位于Domain1 区域和Domain2 区域。活塞在高压气体的驱动下,向压缩管下游方向运动,加速过程中所产生的稀疏波向高压储气室上游方向传播,Domain2 区域压力迅速减小,稀疏波对主体部分Domain1 区域影响较弱,压力减小较慢,主体部分Domain1 区域压力没有得到充分利用,使得活塞发射器效能较低。
图18 高压储气室压力变化曲线Fig.18 Pressure variations in the storage chamber
4 结论
本文对大尺度自由活塞激波风洞中的重活塞软着陆问题进行了研究,得到以下结论:
1)重活塞发射效能、重活塞与壁面摩擦等情况导致重活塞实际运动过程与理论计算存在偏差,调试中需要考虑其影响。建立了活塞速度监测系统,精确测量活塞运行速度,修正理论模型;研制了可靠的止停机构,能够有效减缓重活塞对风洞本体的撞击,避免重活塞甚至风洞洞体的损害。
2)在FD-21 高焓激波风洞的活塞发射机构的发射效能为70%、活塞与压缩管摩擦系数为0.04 的条件下,活塞运动速度-位移曲线和压缩管末端的总压曲线的理论计算、数值模拟与试验结果吻合。数值模拟结果显示:活塞向压缩管下游运动所产生的稀疏波对高压储气室主体部分影响较弱,此区域压力没有得到充分利用,使得活塞发射器发射效能较低。
3)活塞运动过程中,产生的压缩波甚至会汇聚成激波。波系在活塞和压缩管末端来回反射,影响活塞运行速度,对活塞有明显的减速效果;活塞在到达压缩管下游末端之前,来自激波管中的反射激波抵达活塞面,对活塞速度起到更加显著的减速作用。在调试活塞运行过程中,需要利用这些波系的作用,便于实现活塞软着陆。
致谢:感谢中国航天空气动力技术研究院的林键、刘训华、陈伟、王玉东、庞健、田力、王燕等同志在试验安全及技术方面给予的指导。