基于SUBOFF模型的轻质量小型超高速水下航行体的外形结构参数优化
2023-11-03邓尧张健平赵彦宾
邓尧 张健平 赵彦宾
摘要:超高速航行體的外形结构是水介质阻力的主要影响因素。在航行体最大直径50 mm、材料45# 钢(密度7.85 g/cm3)、质量1.0~1.2 kg的限定条件下,基于SUBOFF模型通过粒子群优化算法获得航行体首部、中间和尾部3部分长度范围均为30~40 mm;采用数值模拟和理论分析相结合的研究方法分析了结构参数对航行速度和流阻系数的影响,结果表明当中间长度为30 mm、首部长度为35~40 mm、尾部长度为30 mm和40 mm时,航行速度衰减缓慢,流阻系数较小;采用Design-Expert软件对外形结构参数进一步优化,方差分析表明首部、中间和尾部长度3个因素敏感性次序为首部长度>尾部长度>中间长度,通过响应面分析得到最佳外形结构参数组合为首部长度40 mm、中间长度30 mm、尾部长度30 mm,经验证其流阻系数(2.53×104)最小,优化结果合理。轻质量小型航行体首部、中间和尾部3部分长度对流阻系数的影响相互交互,结构优化时应综合考虑各部分长度。研究结果可为轻质量小型水下航行体外形结构优化设计提供参考。
关键词:SUBOFF模型 超高速航行体 外形结构参数 优化设计
中图分类号:U661.1;T5630.1文献标志码:A文章编号:1671-8755(2023)03-0089-09
Optimization on Shape Parameter of Light-weight Small Ultra-high
Speed Underwater Vehicle Based on SUBOFF Model
DENG Yao, ZHANG Jianping, ZHAO Yanbin
(Key Laboratory of Testing Technology for Manufacturing Process, Ministry of Education,
Southwest University of Science and Technology, Mianyang 621010, Sichuan, China)
Abstract: The shape structure of ultra-high-speed vehicle is the main influencing factor of water medium resistance. Under the limited conditions of a maximum diameter of 50 mm of the navigation body, material being 45# steel(density of 7.85 g/cm3), and the mass range of 1.0-1.2 kg, the length range of the head, middle and tail parts of the vehicle was 30-40 mm through the particle swarm optimization algorithm based on SUBOFF model. The influence of the structural parameters on navigation speed and flow resistance was analyzed throng numerical simulation and theoretical analysis. The results showed that when the middle length was 30 mm, the head length was 35-40 mm, and the tail length was 30 mm or 40 mm, sailing speed decayed slowly and the flow resistance coefficient was small. Design-Expert software was used to further optimize the shape parameters. Analysis of variance showed that sensitivity order of the three factors of head, middle, and tail length was head length>tail length>middle length. The optimal structural parameters obtained through response surface analysis were the head length of 40 mm, the middle length of 30 mm, and the tail length of 30 mm. After verification, its flow resistance coefficient was the smallest(2.53×104) and the optimized results were reasonable. Overall, the influence of the length of the head, middle and tail of the lightweight small vehicle on the flow resistance coefficient was interactive. When optimizing the structure, the length of each part should be comprehensively considered. This research results can provide reference for the structure optimization and design of light-weight small navigation vehicle.
Keywords: SUBOFF model; Ultra-high speed vehicle; Shape parameters; Optimized design
超高速水下航行体具有攻击时间短、命中率高、突防能力强等优点,是目前世界各国在水下航行体领域研究和投入的重点。水下航行体超高速航行时,若水介质阻力过大,穿过气液自由表面会出现复杂的非线性自由表面变化,改变航行体周围流场的压力、流线分布,影响航行体的受力。航行体外形结构是水介质阻力的主要影响因素[1-2]。
目前国内外许多研究人员对水下航行体的外形结构进行了优化设计。Alyanak等[3]根据最优配置算法,对鱼雷总体外形进行优化设计,满足性能要求,航行速度可达120 m/s。傅慧萍等[4]通过Fluent软件模拟分析了长细比为5.0和6.5时端面直径为6,12 ,16 ,20 mm 4种航行体的阻力特性及运动稳定性,获得了航行体外形尺寸对航行性能的影响规律。栗夫园等[5]综合考虑空泡与超空泡航行体的关系,结合超空泡形态和外形分段分析,推导出了航行体最优外形结构的半径计算公式。Forouzani等[6]通过理论和模拟研究获得了弹体质量、弹体长度和空化器直径3个参数对航行性能的影响规律。侯东伯等[7]基于总长度575 mm、最大直径40 mm 的航行体,通过实验研究获得了流速8 m/s时的弹性尾缘对超空泡航行体水动力特性的影响规律。部分研究人员针对航行体首部的外形结构进行了研究。施红辉等[8]模拟分析了平头、120° 锥角、90° 锥角3种头型对首部变形、压力分布、入水空泡形态及入水运动状态的影响。张博等[9-10]在航行体总长为900 mm、圆柱段直径为40 mm的基础上,根据超空泡理论和格兰威尔线型方程优化设计了3种首部线型的航行体,发现首部线型对航行体空泡影响较大。方城林等[11]在航行体总长度50 mm、圆柱段直径为10 mm的基础上,研究分析了平头、127° 锥角、球头、截锥头和截球头5种头型对流体动力和流场特性的影响,结果表明首部流线型越好,入水速度衰减越慢。郑帮涛[12]研究了30° 锥角、120° 锥角、平头和光滑头4种航行体对附着空泡的影响,发现气泡容易附着在分离角较大的钝头型表面。权晓波等[13]采用Kriging代理模型技术对航行体头型的3个控制参数进行优化,获得效果较好的航行体头型。华杨等[14]实验研究了带有35°,40°,45° 切角头型的航行体对入水空泡形状和弹道特性的影响规律。姜宜辰等[15]基于长度3 200 mm、直径400 mm、长宽比8的航行体,应用Myring方程优化设计了首部、尾部和中间形状。
综上所述,外形尺寸和首部形状对水下航行体的流场特性影响显著,需根据不同应用场合优化设计航行体的外形结构,以减小航行体的水介质阻力。本文在航行体最大直径50 mm、材料45# 钢(密度7.85 g/cm3)、质量1.0 ~1.2 kg的限定条件下,结合粒子群优化算法,根据SUBOFF潜艇主艇体首部、中间体和尾部曲线方程优化设计航行体3部分长度,研究分析入水速度和流阻系数的变化规律,获得合适的航行体外形结构,为轻质量小型水下航行体外形结构优化设计提供参考。
1数值计算模型
1.1数学模型
1.1.1Mixture模型
本文选用Mixture模型分析入水中气液的两相流动,以方便更好地描述各相速度。
连续性方程:
t(pm)+·(pmVm)=0(1)
式中:Vm为质量平均速度;pm为混合压强。
动量方程:
t(ρmVm)+·(pmVmVm)=-p+
·[μm(Vm+Vm)]+ρmgm+
F+·(nk-1αkρkVdr,kVdr,k)(2)
式中:ρm为混合密度;μm为混合黏性系数;αk为第k相的体积分数;ρk为第k相的密度;Vdr,k为第k相的飘移速度;F为体积力;n为相数。
定义滑移速度Vqp为第二相(p)相对于主相(q)的速度:
Vqp=Vp-Vq(3)
式中:Vqp为第p相的滑移速度。则飘移速度和滑移速度的关系为:
Vdr,p=Vqp-nk=1αkρkρmVqk(4)
由第二相(p)连续性方程,可得第二相的体积分数方程为:
t(αpρp)+·(αpρpVm)=-·(αpρpVdr,p)(5)
1.1.2Standard k-ε模型
本文选用Standard k-ε湍流模型,其具有形式简单、精度高等优点,被广泛应用水下数值模拟。
(pk)t+(ρkuj)Xi=Xj[(μ+μiσk)kXj]+
Gk+Gb-ρε-YM+Sk(6)
(pε)t+(ρεuj)Xi=Xj[(μ+μtσε)εXj]+
C1sεk(Gk+C3sGb)-C2sρε2kSε(7)
式中:Gk为由于平均速度梯度而造成的湍流动能项;Gb为由于浮力而产生的湍流动能项;YM为湍流马赫数;C1s,C2s,C3s为模型常数;σk为k的湍流普朗特數;σε为ε的湍流普朗特数;μt为湍流黏度系数;Sk,Sε为由于离散相对连续相扰动而产生的湍流动能项。模型参数如表1所示。
1.1.3Zwart-Gerbera-Belamri模型
空化模型选择Zwart-Gerbera-Belamri空化模型,该模型是由著名的Rayleigh-Pleasset 空泡动力学方程发展而来的,模型传质源项表达式如式(8)所示:
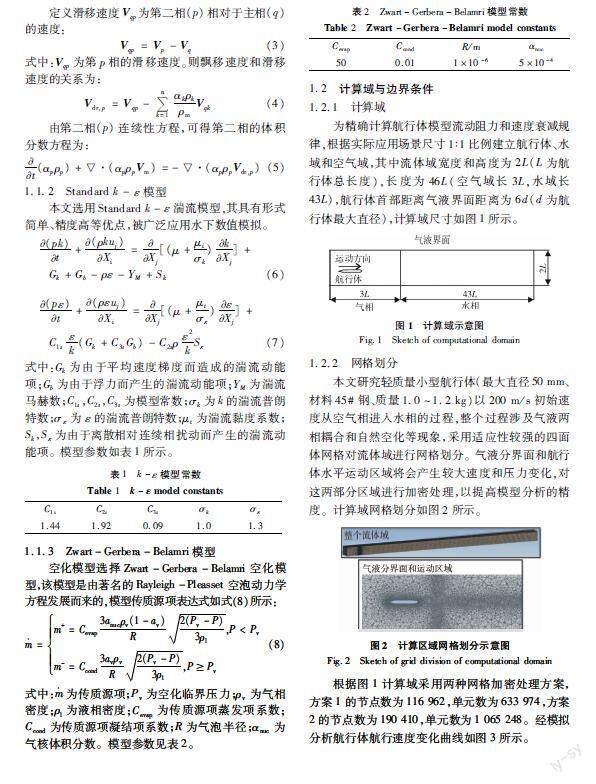
m·=m+=Cevap3anucρv(1-av)R2(Pv-P)3ρl,P m-=Ccond3avρvR2(Pv-P)3ρ1,PPv(8) 式中:m·为传质源项;Pv为空化临界压力;ρv为气相密度;ρl为液相密度;Cevap为传质源项蒸发项系数;Ccond为传质源项凝结项系数;R为气泡半径;αnuc为气核体积分数。模型参数见表2。 1.2计算域与边界條件 1.2.1计算域 为精确计算航行体模型流动阻力和速度衰减规律,根据实际应用场景尺寸1∶1比例建立航行体、水域和空气域,其中流体域宽度和高度为2L(L为航行体总长度),长度为46L(空气域长3L,水域长43L),航行体首部距离气液界面距离为6d(d为航行体最大直径),计算域尺寸如图1所示。 1.2.2网格划分 本文研究轻质量小型航行体(最大直径50 mm、材料45# 钢、质量1.0~1.2 kg)以200 m/s初始速度从空气相进入水相的过程,整个过程涉及气液两相耦合和自然空化等现象,采用适应性较强的四面体网格对流体域进行网格划分。气液分界面和航行体水平运动区域将会产生较大速度和压力变化,对这两部分区域进行加密处理,以提高模型分析的精度。计算域网格划分如图2所示。 根据图1计算域采用两种网格加密处理方案,方案1的节点数为116 962,单元数为633 974,方案2的节点数为190 410,单元数为1 065 248。经模拟分析航行体航行速度变化曲线如图3所示。 从图3可以看出,方案1和方案2速度变化曲线一致,不同航行时间的速度最大相对误差为1%,表明网格加密处理方案2对模拟分析结果影响很小。因此,综合考虑准确性和计算资源,本文采用方案1进行网络划分。不同航行体计算域网格划分最终采用的网格节点数和单元数如表3所示。 1.2.3边界条件 (1)航行体初始速度设置 采用动网格设置航行体初始速度为200 m/s。运动区域采用弹簧光顺法和局部重构法对网格进行重整化,提高变形网格的质量。 (2)出口边界 计算域左右两侧均采用压力出口边界条件,设置为1个标准大气压(1.013 25×105 Pa),环境温度设置为300 K。 (3)壁面边界条件 壁面均采用对称面边界条件,同时假定航行体壁面材料绝热且壁面光滑,避免壁面反射波对数值计算产生干扰。 1.2.4物性参数 模拟分析过程中涉及到空气、水和水蒸气3种流体,具体物性参数见表4。 1.2.5求解方法 计算模拟中采用压力隐式算子分割算法(PISO),压力场空间离散采用压力插补格式(PRESTO!)离散,其他各项均采用三阶精度QUICK格式进行离散,收敛残差为10-6。选取时间步长为Δt=10-5 s,即航行体每运动2 mm为1 个时间步长,总计算步数为700 步。 1.2.6模拟方法验证 采用文献[16]中平头圆柱航行体的试验数据对第1节涉及的数学模型、计算域、边界条件和求解方法进行验证分析,平头圆柱参数见表5。 根据第1节方法,整个计算域长为11.684 0 m,宽为0.050 8 m,高为0.050 8 m,网格数为1 419 313。具体网格划分图略。 图4为平头圆柱航行体入水速度衰减曲线。由图4可以看出,模拟分析获得的入水速度衰减曲线与实验数据变化曲线基本一致,吻合性较好,且速度相对误差≤3%,表明本文采用的模拟分析方法是准确、合理的。 2轻质量小型超高速航行体结构优化 2.1限定条件与优选范围的确定 2.1.1限定条件 航行体总体参数:航行体最大直径50 mm,材料45# 钢(密度7.85 g/cm3),质量1.0 kgm1.2 kg。 优化设计方法:基于SUBOFF潜艇主艇体进行优化设计。 根据SUBOFF 潜艇几何特征报告[17],SUBOFF AFF-8模型由3部分组成,每一部分的方程形式如下: 轴向长度x(单位m):0 (1)艏部曲线:0x1.016时,坐标x处半径R满足: R=Rmax{1.126395101x(0.3x-1)4+ 0.44287407x2(0.3x-1)3+1-(9) (0.3x-1)4(1.2x+1)}12.1 (2)中间段曲线:1.016x3.245时,坐标x处半径R满足: R=Rmax(10) (3)尾部曲线:3.245x4.261时,坐标x处半径R满足: R=Rmax{r2h+rhK0ξ2+(20-20r2h-4rhK0- K13)ξ3+(-45+45r2h+6rhK0+K1)ξ4+(11) (36-36r2h-4rhK0-K1)ξ5+ (-10+10r2h+rhK0-K13)ξ6}0.5 式(11)中:rh=0.1175,K0=10,K1=44.624 4,ξ=(4.261-x)/1.016。 SUBOFF AFF-8模型如图5所示。图中a为首部长度、b为中间长度、c为尾部长度、d为最大直径。 2.1.2优选范围的确定 根据前述限定条件,在已知航行体最大直径d=50 mm和航行体质量m为1.0 ~1.2 kg的情况下,结合粒子群优化算法,集成SolidWorks和Fluent两个软件,构建一个用于特殊限定条件下回转体艇型优化方法,如图6所示。 由图6可知,结合限定条件和SUBOFF模型,基于粒子群优化算法编制外形尺寸优化程序,当质量残差小于0.01 kg时(图7),优化获得航行体总体长度范围90~120 mm。 根据总长度为90~120 mm,随机输出多组a,b,c,对组合进行计算分析输出航行体的质量,直至满足限定条件(1.0 kgm1.2 kg),最后确定首部、中间和尾部长度变化范围均为30~40 mm。 在此基礎上,采用SolidWorks建立物理模型,利用Fluent软件模拟分析,寻找阻力最小、速度衰减最慢的最优航行体结构。 2.2首部长度优选 2.2.1首部长度 基于标准SUBOFF曲线方程与结构参数取值,本文固定中间和尾部长度为30 mm,构建3个首部长度不同的航行体,具体质量分布如表6所示。 2.2.2入水速度变化规律 图8为航行体首部长度对速度衰减的影响曲线。从图8可以看出,航行体入水过程中速度衰减规律基本一致。当航行时间小于1.62 ms时速度保持不变,当航行时间大于1.62 ms时速度快速衰减。主要原因是在空气相中航行时,空气密度小,流动阻力小,而当进入水中后,水密度远远大于空气密度,水介质阻力急剧增大,致使速度急速衰减。除此之外,首部长度为35 mm时,速度衰减最慢,7 ms内速度下降约23.2%,首部长度为30 mm时,速度衰减最快,7 ms内速度下降率是首部长度35 mm的1.4倍。因此,拟确定航行体首部长度在35 mm和40 mm之间。 2.2.3入水流阻系数变化规律 图9为首部长度对流阻系数的影响曲线。由图9可知,航行体入水过程中流阻系数变化规律基本一致,当航行时间为1.62 ms时,流阻系数直线上升达到最大值;当时间为1.62~1.80 ms时,流阻系数出现了脉动现象,之后缓慢衰减。首部长度为35 mm时,航行流阻系数较小,最大流阻系数为3.64×104,是首部长度为30 mm时的70%。 综上所述,航行体首部长度在35~40 mm范围内,速度衰减缓慢,流阻系数较小,为较佳的首部长度。 2.3尾部长度优选 2.3.1尾部长度 基于2.2节与结构参数取值,固定首部长度35 mm和中间长度30 mm,根据式(9)-式(11)构建3个尾部长度不同的航行体,具体质量分布如表7所示。 2.3.2入水速度变化规律 图10为不同尾部长度下航行体速度的变化曲线。从图10可知,尾部长度为30 mm和40 mm时,速度衰减较慢,7 ms时速度约为153 m/s,而尾部长度为35 mm时,速度衰减较快。 2.3.3入水流阻系数变化规律 图11为不同尾部长度下航行体流阻系数的变化曲线,从图11可以看出,尾部长度为30 mm,航行流阻系数较小,最大流阻系数约为2.77×104,为尾部长度35 mm的66%。因此,航行体尾部长度为30 mm时,航行体入水流阻系数较优。 综上所述,航行体较好的尾部长度为30 mm和40 mm。 2.4中间长度的影响分析与优选 2.4.1中间部分长度 由2.2节和2.3节可知,最佳首尾部长度分别为35 mm和30 mm,在此基础上进一步优化中间部分长度,模拟分析3种不同中间长度(30,35,40 mm)航行体的流阻系数和速度衰减规律,寻找最佳中间部分长度。根据式(9)-式(11)构建3个不同航行体,具体质量分布如表8所示。 2.4.2入水过程中速度的变化规律 图12为中间长度对航行体速度衰减的影响曲线。从图12可知,相较于首、尾长度,中间长度对入水速度的影响较小,7 ms时最大速度与最小速度之间相差仅为6.3 m/s。中间长度为30 mm的航行体水下速度衰减较慢。 2.4.3入水过程中流阻系数的变化规律 图13为中间长度对流阻系数的影响曲线。从图13可以看出,中间长度为30 mm时,流阻系数最小,最大流阻系数约为2.77×104,是中间长度为40 mm的90%。 3响应面优化设计 3.1结构长度范围与水平选取 根据第2节单因素的数值模拟结果可知,首部、尾部和中间部分较佳长度值范围分别为30~40 mm,30~40 mm,25~35 mm。综合考虑航行体质量1.0~1.2 kg,应用Design-Expert 8.0.6软件,依据Box-Behnken试验设计原理,采用3因素3水平响应面优化方案(表9)对航行体3部分长度值进行优化分析。 3.2数值模拟方案和结果 根据表9的因素和水平,设计了17个响应面试验,具体长度值的组合见表10。根据表10中17组长度值进行数值模拟分析,寻找最大流阻系数为最小值的最优组合,具体模拟结果见表10。 根据表10模拟分析结果,应用式(12)所示的平方根回归模型,采用Design-Expert 8.0.6软件进行方差分析,得到各因素对航行体最大流阻系数影响的显著性情况,结果如表11所示。 =36.17-5.05a+19.9b-3.04c- 1.72ab+1.47bc-7.10a2+0.62b2- 0.16a2b+1.49b2c+1.18a2b2(12) 式中:为流阻系数;a为首部长度;b为中间长度;c为尾部长度。 由表11可知,回归模型对应P值小于0.05,说明该模型在5%水平差异显著。从模型决定系数R2=0.8869 也可看出,其变异率为11.31%,表明该回归模型能用于最大流阻系数影响因素显著性分析。 影响因素对最大流阻系数的显著性可由F值检验判定。由表11可知,a和c影响因素的F值分别为16.15和5.22,大于F0.01(1,4)=4.71,所以首部长度、尾部长度对最大流阻系数的影响显著;b影响因素F值为3.34,小于F0.01(1,4)=4.71,所以中间长度对最大流阻系数的影响在1% 水平不显著。根据F值的大小判断3个影响因素敏感性的主次顺序为:首部长度>尾部长度>中间长度。由表11还可以看出,二次项ab,a2和b2c所对应的P值分别为0.041 1,0.009 1,0.023 7,均小于0.05,对最大流阻系数的影响显著;其余各项的P值都大于0.05,对最大流阻系数影响均不显著。 3.3结构长度值优化与验证 以最小值的最大流阻系数为优化目标,采用响应面法对最大流阻系数回归模型(式(12))在各因素实验水平范围内进行优化求解,得到限定条件下航行体入水的最佳结构参数组合:首部长度为 40.98 mm,中间长度为30.54 mm,尾部长度为30.42 mm,质量大小为1.190 kg,此时航行体高速跨介质入水的最大流阻系数值最小,为2.48×104。为了加工方便,对优化参数取整:首部长度40 mm、中间长度30 mm、尾部长度30 mm,质量大小为1.179 kg。将该组合参数代入式(12)计算得到入水最大流阻系数为2.53×104,同优化组合计算的最大流阻系数的绝对误差仅为3.5%,因此取整后的组合长度值可以作为最优的航行体长度值。 为了进一步验证航行体长度组合的可行性,采用相同边界条件和模拟方法,分别模拟分析了优化组合(实验1)与表10中流阻系数小的3组数据(分别为实验2-实验4)进行比较分析,具体数据详见表12。 由表12可知,优化长度值组合的最大流阻系数最小,其值为2.53×104,小于其他长度值组合方案的流阻系数,表明了响应面法对航行体长度值组合参数优化结果是合理的,即首部40 mm、中间30 mm、尾部30 mm为最优航行体外形长度组合参数。 4结论 在航行体最大直径50 mm、材料45# 钢(密度7.85 g/cm3),质量1.0~1.2 kg的限定条件下,基于SUBOFF模型通过粒子群优化算法获得航行体首部长度为35~40 mm、尾部长度为30 mm和40 mm、中间长度为30 mm时,流阻系数较小,航行速度衰减缓慢;航行体首部长度、中间长度、尾部长度3个因素敏感性次序为首部长度>尾部长度>中间长度;最佳航行体模型外形参数组合为首部长度40 mm、中间长度30 mm、尾部长度30 mm,经验证其最大流阻系数值(2.53×104)最小。研究结果表明,轻质量小型水下航行体首部、中间和尾部3部分长度对流阻系数的影响相互交互,结构优化时应综合考虑各部分长度。本文结果可为轻质量小型水下航行体外形结构优化设计提供参考。 参考文献 [1]熊永亮. 水下高速航行体超空泡减阻特性研究[D]. 哈尔滨:哈尔滨工程大学, 2008. [2]陈宇翔. 物体穿过自由表面的多相流体动力学问题研究[D]. 哈尔滨:哈尔滨工程大学, 2012. [3]ALYANAK E, GRANDHI R, PENMETSA R. Optimum design of a supercavitating torpedo considering overall size, shape, and structural configuration[J]. International Journal of Solids and Structures, 2006, 43(3/4): 642-657. [4]傅慧萍, 陈延伟, 游庆. 超空泡航行体外形设计及航程分析[J]. 弹道学报, 2007, 19(3):15-18,22. [5]栗夫园, 张宇文, 滕鹏桦, 等. 超空泡鱼雷外形优化[J]. 北京航空航天大学学报, 2014, 40(6): 815-818. [6]FOROUZANI H, SARANJAM B, KAMALI R. A study on the motion of high speed supercavitating projectiles[J]. Journal of Applied Fluid Mechanics, 2018, 11(6): 1727-1738. [7]侯东伯, 王聪, 夏维学, 等. 弹性尾缘对超空泡航行体空泡形态与压力脉动特性影响的水洞试验研究[J]. 兵工学报, 2020, 41(3): 534-541. [8]施红辉, 周栋, 温俊生, 等. 基于ALE方法的弹性圆柱壳入水时的流固耦合模拟[J]. 弹道学报, 2020, 32(1): 9-14, 46. [9]张博, 张宇文, 李文哲, 等. 超空泡航行體前部线型对空泡生成速度影响实验研究[J]. 西北工业大学学报, 2008, 26(5): 540-544. [10]张博, 张宇文, 孙致月, 等. 超空化航行体前部外径对空泡影响的研究[J]. 西北工业大学学报, 2010, 28(6): 834-839. [11]方城林, 魏英杰, 王聪, 等. 不同头型高速射弹垂直入水数值模拟[J]. 哈尔滨工业大学学报, 2016, 48(10): 77-82. [12]郑帮涛. 航行体头型对气泡附着影响的数值研究[J]. 船舶力学, 2015, 19(7): 757-764. [13]权晓波, 王惠, 魏海鹏, 等. 基于代理模型的水下航行体头型优化设计方法研究[J]. 船舶力学, 2016, 20(10): 1262-1268. [14]华扬, 施瑶, 潘光, 等. 非对称头型航行器入水空泡形态与弹道特性的实验研究[J]. 西北工业大学学报, 2021, 39(6): 1249-1258. [15]姜宜辰, 赵月, 熊济时, 等. 水下航行器艇体形状对阻力及流噪声综合影响[J]. 哈尔滨工程大学学报, 2022, 43(1): 76-82, 138. [16]郭子涛. 弹体入水特性及不同介质中金属靶的抗侵彻性能研究[D]. 哈尔滨: 哈尔滨工业大学, 2012. [17]GROVES N C, HUANG T T, CHANG M S. Geometric characteristics of DARPA SUBOFF models (DTRC Model Numbers 5470 and 5471) [R]. Maryland, David Taylor Research Center, 1989.
