战车初级电站监测控制系统设计
2023-11-02尚舒阳朱超石志翔王波李敏
尚舒阳,朱超,石志翔,王波,李敏
(1.西北机电工程研究所,陕西 咸阳 712099;2.陆军西安军事代表局驻咸阳地区军事代表室,陕西 咸阳 712000)
初级电站系统[1]主要由发电机组及发电机控制器、电源配电箱、直流电源箱、功率补偿箱、直流发电机、蓄电池组和连接电缆等构成。其功能是通过发电机组实现机械能向电能的转化,完成用电设备供电任务,即为用电设备提供所需的高压、低压电源,并完成车体部分设备配电功能。电站运行状态监测控制系统作为电源控制系统的重要组成部分,负责采集、处理初级电站及各供配电箱体状态信息,并根据处理结果进行控制保护,同时使用CAN总线技术上报重要运行参数和状态信息。
该系统采用DSP中的JDSPF28335芯片作为控制系统核心,DSP是一种数字控制处理器,外设丰富,具有高运算精度、多条件操作、低功耗等特点。广泛应用于电机控制、变频电源、UPS电源、光伏并网逆变器、通信、医疗、航空航天等领域。以DSP作为核心的系统具有强大的控制和信号处理能力,能够实现复杂的控制算法。笔者详细论述了电站运行状态监测控制系统的总体设计思路和方法,对工程实践有一定的指导意义。
1 系统原理及硬件设计
初级电站运行状态监测控制系统由系统供电、状态信息采集电路、数据处理、CAN通信模块4部分组成。系统供电部分由DC/DC电源模块组成,将外部供电电源转为系统所需的直流电源,为后续功能实现提供所需电源。状态信息采集电路主要是将战车初级电站系统运行时产生的各类状态信息采集并进行隔离处理,隔离处理是为了防止信号之间相互干扰影响采集结果[2]。数据处理部分采用DSP芯片作为处理核心,其运算速度快、精度高,外设接口资源丰富,可满足各类初级电站运行状态监测控制的需求。CAN通信模块可与其他模块节点组成通信网络,实现高速稳定的数据交互功能。系统原理框图如图1所示。

该监测系统将初级电站运行过程中产生的各类状态信息采集隔离后送往DSP处理器中,并通过处理器内部软件对数据进行后续处理。在部分设备状态信息预处理中,非线性电压、电流信号采用Sigma-Kalman方法进行滤波与平滑处理,部分故障信号进行消抖处理,降低干扰的同时保证数据准确性、完整性。完成预处理后,将各类数据进行解析,通过CAN通信节点上报至CAN总线,可在其他CAN节点处接收解析数据并进行实时监测。同时根据解析结果判断异常情况出现时,可自行切断输出电压,防止其他用电设备受到损伤。
1.1 状态信息采集电路设计
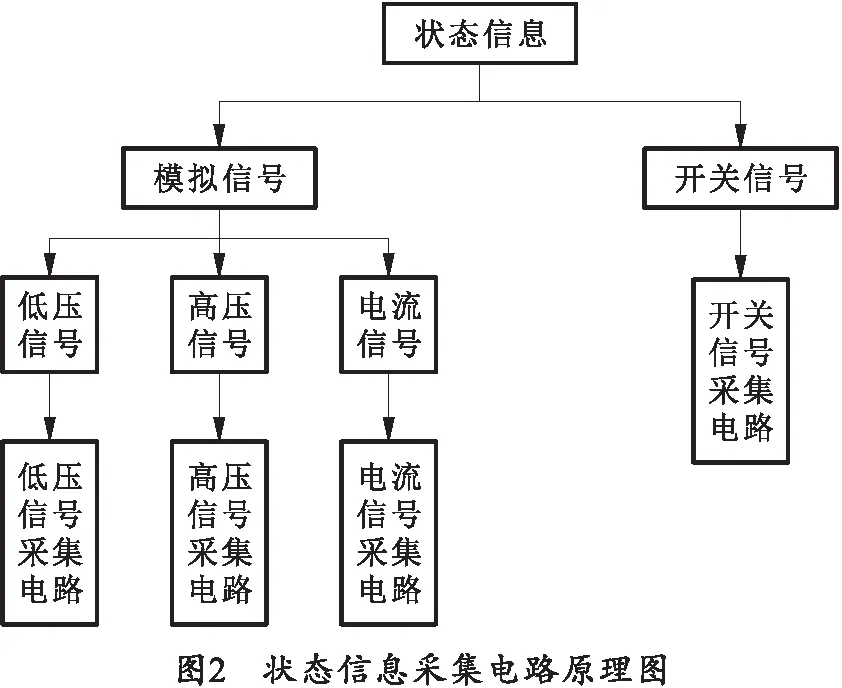
初级电站系统产生的状态信息分别为模拟信号与开关信号,因此需要根据信号类型使用相应的隔离电路完成信息获取,如图2所示,然后送入DSP对数据进行处理[3]。
1.1.1 模拟信号处理电路
模拟信号处理电路根据输入电压不同,采用不同的隔离电路测量输入电压。针对低压信号,采用隔离运算放大器处理输入的电压信号,如图3所示。

该电路在输入端采用电阻进行分压,分压后的电压信号经过隔离运放等比例输出。输出电压U2与输入电压U1关系为
(1)
针对输入的高压信号,采用霍尔电压传感器测量高压信号。霍尔电压传感器是一种利用霍尔效应原理制成的检测电压的装置,精度高、功耗小,能够在电隔离条件下测量直流、交流、脉冲及各种不规则的电压[4]。该测量电路如图4所示,被测电压U3经过电阻R3形成电流信号进入霍尔电压传感器,输出端根据线匝比KN获得同相电流信号。该电流信号经过电阻R4产生电压U4进入DSP。
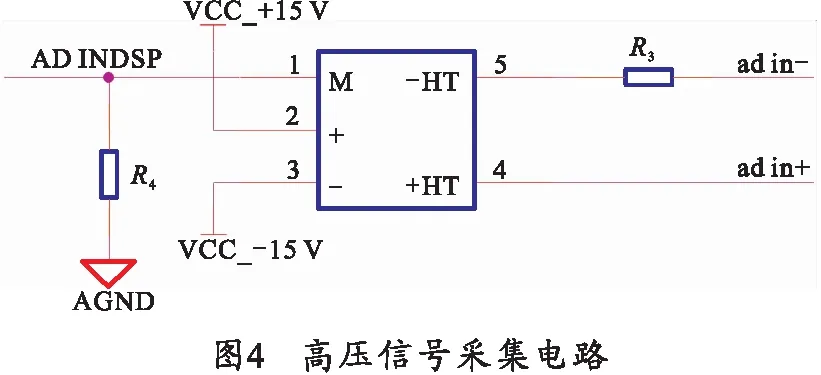
输出电压U4大小为
(2)
针对需要监测的电流信号,使用电流传感器采集该电流信号,然后通过两个反向比例运算电路,将被测电流转为电压信号,如图5所示。

被测电流I1与送入DSP的电压U6关系如下:
(3)
(4)
式中,KN为霍尔传感器的线匝比。
通过以上方法,输入的低压、高压和电流信号经过采集电路后均可得到线性的采集结果,为后续DSP进行数据的处理与控制提供了很大的便利。
1.1.2 开关信号处理电路
开关信号处理电路采用四通道光电耦合器件构成光电隔离电路,如图6所示。

该光电隔离电路主要功能是将输入、输出信号隔离,使被隔离的两部分电路之间没有直接连接,防止干扰的产生,从而起到隔离保护的作用[5]。其输入端限流电阻Ri与输出端上拉电阻Ro的阻值计算方法如下:
(5)
(6)
IF=Io×RCTR,
(7)
式中:Vi为输入电压;Vb为二极管导通压降;IF为输入电流;VCC为输出端外接电压;VCE为三极管压降;Io为输出电流;RCTR为电流传输比。
1.2 处理器设计
处理器核心采用JDSPF28335芯片,与单片机相比,该芯片接口资源更加丰富,运算精度及稳定性也相对较高,可完成更复杂的功能需求。
使用该芯片作为处理器核心的同时,要搭建相应外围电路才可以构成整个处理器系统。外围电路的基本部分由JTAG、时钟电路、EEPROM等组成。
1.3 CAN通信功能
CAN是控制器局域网(Controller Area Network)的简称,作为一种串行数据通信协议,具有通信速率高、成本低、可靠性高等优点,已被广泛应用于各类行业[6]。系统选用高速CAN隔离收发器件CTM1051AM实现数据交互功能。该器件具有较高的集成性以及良好的抗干扰能力,单个器件即可完成数据的收发功能。电路如图7所示,TVS稳压管对供电部分进行保护[7]。
通过该电路即可实现CAN节点的隔离与收发,与其他CAN节点互连可组成控制局域网,完成CAN总线上的通信与数据交互。
2 系统软件设计
初级电站系统的状态信息与数据采集完成后,经不同数据通道进入DSP,即可通过DSP中的软件完成数据的预处理、解析、通信、控制等功能。
2.1 软件总体设计
本电站运行状态监测控制系统软件在DSP集成开发环境CCS5.5中设计完成,编程语言采用C语言[8]。系统软件处理流程如图8所示,其任务和调用关系主要由主任务、中断服务程序、定时器任务、数据接收任务、数据处理任务、数据组合任务、数据发送任务等构成。

1)主任务。系统上电后首先被调用执行的任务,主要完成中断服务初始化,数据端口初始化、定时器初始配置以及一些资源分配。
2)中断服务程序。在接收到时间同步信号后,完成定时器的开启,为系统定时进行数据发送提供条件。
3)定时器任务。每1 ms对接收到的数据进行处理,并且调用数据发送和状态指示任务输出数据和系统状态。
4)CAN数据接收任务和采集任务。CAN数据接收任务是在程序中通过判断接收邮箱的接收标志位来判断数据是否到来,当接收到新数据,则调用数据组合程序将数据进行发送并重置接收标志。采集任务通过读取模拟信号和开关信号接口来完成相应数据的采集。
5)数据处理任务和状态判断任务。数据处理任务主要是完成滤波功能,对经采集电路后进入DSP的电压、电流信息进行Sigma-Kalman滤波,对开关信号进行消抖滤波。状态判断的主要功能是根据处理后的数据进行判断。
6)数据组合任务。将CAN节点接收数据和预处理后数据按一定的格式和协议进行组合,存入发送缓冲区。
7)数据发送和状态指示任务。数据发送任务是在规定的发送时刻到来时将发送缓冲区中的数据发送出去。状态指示任务则是完成开关信号的输出,以指示系统运行状态。
2.2 数据处理设计
电站运行状态监测系统软件的数据处理示意图如图9所示。主要分为数据接收、数据处理、数据发送3部分构成。
数据接收主要接收来自电机控制器、蓄电池控制、电源采样、传感器、压力传感器、液压装置的测量数据和状态数据。
数据处理指内部数据流的解析,其中,底盘电机状态解析用于将电机的转速、转矩进行状态解析,得到底盘电机运行的功率;电池组状态解析是通过分析蓄电池组的电流电压并结合传感器发送状态信号得到当前工作的蓄电池组状态是否正常;采样滤波处理的输入为通过电源采样得到的初级电站电压电流信息,再通过电压电流状态判断得到初级电站过压、欠压、过流、欠流等状态;故障状态解析的输入为传感器、压力传感器、液压装置等传感器输入的开关信号,通过消抖处理后,进行相应的故障诊断。
数据发送主要将电机状态、电池组状态、电源系统状态、继电器控制信号输出至CAN总线或信号指示灯。

2.3 处理算法设计
针对初级电站电压电流输出是非线性的特点,采用Sigma-Kalman滤波方法对初级电站输出的电压电流信号进行滤波处理和数据平滑[9]。该方法是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。同时该方法能够从数据序列中排除干扰噪声,满足本系统信号采集的滤波要求。其具体步骤如下:
步骤1根据系统状态变量x和估计方差P建立系统状态方程,其中w为过程噪声,v为系统量测噪声,Q和R分别是过程噪声与量测噪声的协方差:
(8)
步骤2创建Sigma点集采样序列,Sigma点个数为2n+1,n为系统状态变量的维数:
(9)
步骤3计算Sigma点集加权系数:
(10)

步骤4对采样点Xk-1,i进行状态估计:
(11)
步骤5均方误差时间更新:
(12)
步骤6系统输出的先验估计:
(13)
步骤7滤波增益矩阵计算:
(14)
(15)
步骤8状态最优估计:
(16)
步骤9均方误差更新:
(17)
通过以上步骤,即可完成部分数据的滤波处理。
实际情况下,初级电站产生的信号经常含有大量噪声,因此假设输入信号幅值为27,在此基础上叠加一个标准差为0.2的高斯噪声,该信号如图10所示。

对该信号进行Sigma-Kalman滤波处理,结果如图11所示。

可以看出使用Sigma-Kalman滤波方法能够有效减少噪声对信号的干扰,提高系统的抗干扰能力。
3 测试结果
将该初电站运行状态监测系统与某战车初级电站系统配套使用,可完成各类状态信息监测与解析,并将结果通过CAN节点发送至上位机,实现实时监测功能。在测试时模拟各类初级电站异常情况,该监测控制系统均可及时上报,并根据故障类型进行控制保护,响应速度十分迅速。同时对初级电站运行时产生的电压、电流进行监测,结果如表1、2所示。

表1 DC 325 V电压、电流测试结果

表2 DC 28 V电压、电流测试结果
通过对表1、2数据分析可以看出,该监测控制系统可有效监测初级电站运行时产生的电压、电流,精度较高且十分稳定。该系统可同时进行12路模拟信号、32路开关信号的采集与处理,解决了现有系统接口较少不能满足初级电站系统监测控制需求的问题。
4 结束语
笔者立足于目前初级电站监测控制系统现状,发掘DSP片内丰富资源的特点,设计了一种基于DSP的电站运行状态监测控制系统。该系统可完成不同类型状态信息采集,并采用Sigma-Kalman滤波和消抖滤波方法对部分状态信息进行处理,完成数据解析与控制功能,具有较好的抗干扰能力。测试结果表明,该电站运行状态监测系统精度高、性能稳定、响应速度快,能提高初级电站供配电时的安全系数,为更稳定、可靠的战车初级电站系统运行状态监测控制需求提供了解决方案。
