外能源转管航炮的精度修正方法
2023-11-02黄铮陈瑶钟昆张翰
黄铮,陈瑶,钟昆,张翰
(成都飞机设计研究所,四川 成都 610000)
随着战斗机空空导弹技术和传感器技术的快速发展,超视距空战成为空空作战的主要作战形式。但是在实战中由于电子干扰技术的应用,中远距导弹的攻击机会和命中率会受到很大影响,近距格斗成为交战双方决定胜负的关键环节,具有载弹量大、不易受干扰和使用灵活等优点的航炮仍然是战斗机在近距格斗态势下的主战武器之一。航炮射击精度与航炮的加工精度、安装装配精度、飞机机体刚度等因素相关,无法仅用理论分析精确描述飞机的瞄准精度,因此需要从工程实际出发采用一定的方法对转管航炮的射击点进行修正。
转管航炮采用多管串行发射技术,每根炮管需转动到固定的射击位时才能进行发射。当炮管转动到射击位时,依靠航炮自动机的转动带动炮弹在射击炮管中完成进膛、击发、抽壳的射击动作循环。转管航炮大幅度提高了火炮的射速、寿命和立靶密集度[1],但转管航炮与直管航炮相比,转管航炮射击精度的影响因素多,与射击处的高度、温度、风速、炮管转动速度、飞机结构刚度和航炮后坐力相关,仅通过炮弹的三自由度公式难以准确的计算炮弹弹道,因此需采取理论分析与校靶试验相结合的方式进行修正,提高转管航炮的精度。
1 转管航炮校靶现状
转管航炮射击精度与安装姿态和自身的动态特性息息相关,航炮的攻击距离一般在300~1 000 m内,毫弧度级的安装误差和射击精度误差经攻击距离放大后会导致航炮瞄准点与实际射击点相差数米,因此确认航炮在战斗机上的安装精度误差和动态射击特性是战斗机航炮研制过程中的关键环节[2]。
我国装备的歼击机、强击机、轰炸机上的航炮校靶通常使用热校靶和冷校靶两种方法。热校靶指在特定靶场下进行实弹射击的校靶方式,首先使用基准炮完成射击,再根据基准炮射击结果和航炮特性在靶板上绘制航炮校靶圆和检查圆,形成校靶图,最后使用需校靶的航炮进行射击检查航炮弹着点是否进入航炮检查圆,若未进入,则需对航炮安装固定座进行调整,直到航炮的弹着点进入航炮检查圆为止。冷校靶指使用校靶设备(如激光校靶镜)将航炮炮管轴线投影到靶板上获得冷校靶点,在火控计算中假定炮弹在空中做自由落体运动并计算航炮在竖直方向上的下降量,进而获得炮弹在靶板上的弹着点。航炮热校靶相较于冷校靶具有精度高的优点,但进行热校靶需要部队修建专用靶场,并且在校靶中花费大量的人力、物力[3]。
美国第四代隐身战斗机F-22装备了M61A2六管转管航炮,M61A2口径20 mm,采用无链式供弹系统,主要用于弥补F-22在近距离(600 m)空战时的火力空缺。F-22的航炮地面实弹射击试验在美国爱德华空军基地的地面靶场进行,如图1所示。由于M61A2航炮有+3°的安装角,为使得炮管平行于地面,试验人员用钢索将飞机固定在一个斜坡上并降低前起落架高度,使得飞机以负迎角姿态停放。在地面试验时,座舱人员关闭了F-22的发动机和辅助动力系统,使用两台动力车和一台电力车为M61A2航炮提供动力,同时使用两台空调车冷却F-22的航炮炮舱和机体结构。整个地面试验耗时3周,检查了航炮炮弹在靶标上的弹着点分布,测定了航炮后坐力、炮舱的热力学环境和射击后火药废气浓度[4]。

2 转管航炮的精度修正方法
炮弹离开炮口前,由于航炮系统整体并非刚体,射击后坐力会使得炮管发生一定量的变形,因此炮弹初始速度方向受航炮安装位置和航炮后坐力影响。炮弹离开炮口后,受重力和空气阻力影响,炮弹弹道会发生一定的改变。航炮的安装误差可通过航炮冷校靶进行测量,获得航炮在机体系下的安装偏航角和俯仰角;航炮后坐力带来的误差可通过航炮热校靶[5]进行测量;炮弹离开炮口后的外弹道可由炮弹的三自由度方程进行测量。
2.1 转管航炮外弹道数学模型
转管航炮外弹道指炮弹在离开炮管后形成的运动轨迹[6]。在传统的三代机航炮火控模型中,仅考虑炮弹在外弹道中受重力加速度影响而以抛物线的轨迹进行运动,分别以前向、右向、上向为x轴正向、y轴正向、z轴正向建立直角坐标系O-xyz,则炮弹在直角坐标系下的运动方程为
(1)
式中:vx、vy、vz、x、y、z分别为炮弹飞行方向前向速度、右向速度、上向速度、前向坐标、右向坐标、上向坐标;g为重力加速度。
在转管航炮研制初期,试验人员发现航炮实际射击弹道与式(1)中的弹道模型相差甚远,原因是转管航炮射击时转动速度带动航炮在垂直航向方向上有初速;同时炮弹出膛后进行高速自旋,空气阻力对炮弹在空中的轨迹影响较大。
为充分以数学方程的形式预测转管航炮炮弹的轨迹,试验人员在地面进行了炮弹的实弹射击,结合火炮弹道的相关理论,试验人员拟合出了相应的数学方程。
2.1.1 基本假设
为降低机载火控软件的计算量和保证拟合方程的真实性,进行以下基本假设[7]:
1)航炮炮弹运动过程中,忽略起始段的章动过程,即章动角δ=0°;
2)弹丸是轴对称体;
3)地表面为平面;
4)重力加速度的大小和方向始终铅直向下;
5)科氏加速度为0。
2.1.2 炮弹外弹道运动数学模型


炮弹因航炮炮管转动在y方向上的初速为
(2)
炮弹在x方向上的初速为
vx=v0+v1,
(3)
故炮弹外弹道运动数学模型的初始条件为
(4)
炮弹在外弹道飞行中受空气阻力和重力加速度的影响,阻力加速度受气重函数、阻力函数和速度大小影响,其外弹道方程如下:
(5)
式中:wx、wz、g、c分别为纵风速度、横风速度、重力加速度、弹道系数,沿弹的飞行速度方向看,纵风前向为正,横风从左向右为正;Hτ(y)、G(vτ)分别为气重函数和阻力函数。
2.1.3 气重函数Hτ(y)和阻力函数G(vτ)
气重函数Hτ(y)指的是空气密度随温度和压力变化而变化的分布函数:
(6)
式中:P0n=1 013.33 hPa;大气层内温度τ随高度变化而变化:
(7)
式中:τ0n=288 K;A=230 K;B=6.328×10-3;C=1.172×10-6。
阻力函数指空气阻力系数与温度和速度相关的分布函数:
(8)
式中:标准气象条件下,τ0n=288.9 K,C0n=341.1 m/s;Cx0n与速度相关,可查询43年阻力定律表得到。43年阻力定律表是1943年由原苏联炮兵工程学院外弹道教研室制定的阻力系数与速度的关系表,如表1所示,表中:v10为速度vτ的十位(m/s);v100为速度vτ的百位和千位(m/s);Cx0n无单位;当vτ<200 m/s时,Cx0n=0.157,C0n=341.1 m/s。
表1 43年阻力Cx0n定律表
2.1.4 构建外弹道数学模型
根据前文中的式(4)~(8),在机载火控软件中实现外弹道运动数学模型,即O-xyz坐标系下三向坐标随时间的变化关系,如图3中红色线所示;同时根据机载雷达获取的目标位置、速度和加速度信息预测目标运动轨迹,如图3中蓝色线所示。
火控系统计算红线和蓝线在相同时间后的交点获得在两线相交时载机的方位角α和俯仰角β;同时,火控瞄准符引导飞行员调整飞机姿态至方位角α和俯仰角β后完成射击毁伤目标。
2.2 转管航炮冷校靶
转管航炮火控系统软件在计算时以理论安装位置来计算航炮外弹道,但是受加工误差和安装精度的影响,航炮在飞机上的实际安装姿态往往与理论安装姿态相比具有一定的安装误差,安装误差经射击距离放大后会产生较大脱靶量。因此,为尽可能准确地构建航炮外弹道模型,笔者通过转管航炮冷校靶的方式对航炮的实际安装姿态进行测量,并通过地面数据加载的形式对航炮的初始姿态进行修正,以解决不同架次飞机航炮安装具有差异性的问题。
1)在转管航炮上确立A、B两冷校靶测量点,使A、B连线与炮管轴线保持一致,如图4所示。
2)在空旷场地中使用激光雷达测量仪测量飞机的方位和水平基准点,获得飞机基准轴线在激光雷达坐标系下的方位角α1和俯仰角β1。
3)调整A、B两点所在炮管至射击位置,使用激光定位仪获得A、B两点在激光雷达坐标系下的坐标(xA,yA,zA)和(xB,yB,zB)。
4)计算A、B连线在激光雷达坐标系下的方位角α2、俯仰角β2以及航炮轴线在机体系下的方位角α、俯仰角β:
(9)
(10)
α=α2-α1,
(11)
β=β2-β1.
(12)
5)将方位角α和俯仰角β通过任务加载卡加载到飞机火控软件中作为航炮射击的初始姿态,用于修正航炮外弹道的初始方位角和初始俯仰角。
2.3 转管航炮系统热校靶
航炮在射击过程中会因刚度、后坐力等固有特性对航炮炮管在偏航、俯仰方向有偏移,同时不同型号航炮在不同飞机上的安装方式各异,难以通过一种理论方法对射击特性进行分析。因此,笔者提出了一种热校靶方法,对航炮的射击特性进行测量。
2.3.1 热校靶误差来源
如图5所示为航炮航向后视图和侧视图,后坐力方向垂直纸面向外,因航炮射击炮管在射击时产生后坐力Ft受力点与航炮的安装支座位置不同,后坐力存在力臂L会使得炮管产生向上翘的姿态,因此影响炮弹的初始运动方向。
转管航炮系统结构复杂,不可将其简化为固连刚体进行理论计算,因此通过实弹射击获取射击结果,对炮弹初始运动方向变化量进行修正,计算得到炮弹因后坐力而产生的偏差角。
2.3.2 构建热校靶靶板
航炮进行热校靶前,需要在航炮正前方构建一块足够大的靶板,以保证所有炮弹都能落入靶板上,因此需要对转管航炮的炮弹分布进行分析,计算得出靶板的具体尺寸以及炮弹落点的分布范围。
2.3.2.1 转管航炮的散布必中界计算
航炮的散布必中界指的是100%炮弹弹着点落入该界限内,航炮散布半数必中界指的是50%航炮炮弹弹着点落入该界限内。根据经验,航炮弹着点散布遵循正态分布律,则当航炮进行n次射击时,均方差(标准差)为
(11)

航炮散布半数必中界与航炮射击距离的比值又称为航炮立靶密集度,某型转管航炮立靶密集度要求为立靶密集度不大于σ(mrad),那么靶距为SL(m)时航炮散布半数必中界为
0.674 5σx=σSL,
则航炮的散布必中界为
2.3.2.2 构建热校靶弹着点坐标系
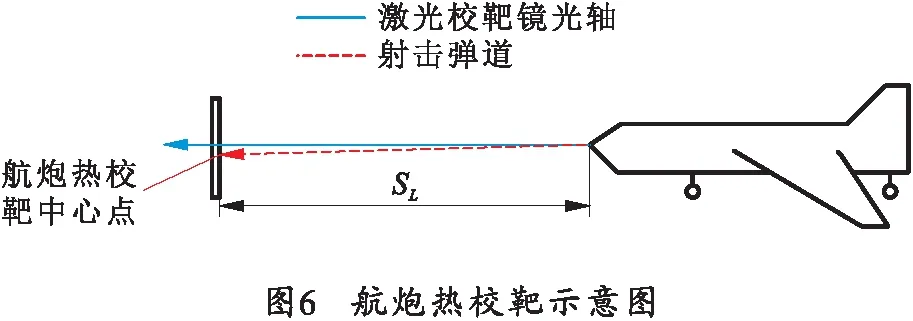
如图6所示,将飞机置于靶场内,并于射击炮管正前方布置靶板,通过激光校靶器将射击炮管投影到靶板上,以射击炮管投影点为原点,炮管转动方向为x轴正向,竖直向上为y轴正向构建坐标系[9]。
根据航炮外弹道和航炮冷校靶可计算出航炮在射击过程中的运动轨迹,获得在靶距为SL时航炮炮弹的理论弹着点,即当x=SL时,求解航炮外弹道模型中的右向坐标y和上向坐标z,获得航炮在靶距为SL时的炮弹坐标(y0,z0),即航炮理论弹着点坐标为(y0,z0)。调整靶板使得航炮理论弹着点(y0,z0)距离靶板边界至少5.93SLσ(mm),这样可使得所有炮弹落入靶板内[10],如图7所示。

2.3.3 转管航炮热校靶过程
如图6所示,飞机在地面进行航炮实弹射击,获得实弹射击下航炮在靶板上的实际弹着点,通过对比航炮实际弹着点与航炮理论弹着点之间的差值,即为航炮因后坐力而产生的误差[11]。图7所示为航炮实际弹着点在靶板上的示意,则航炮因后坐力而产生的航向和俯仰上的误差为
(12)
航炮因后坐力而产生航向和方位误差角为
(13)
综上,转管航炮的精度修正需要考虑航炮外弹道数学模型、转管航炮系统冷校靶、转管航炮系统热校靶3个部分,才能较为准确地在飞机平显上描述出转管航炮的瞄准点。
3 试验验证
转管航炮进行地面射击试验时,航炮应正对着靶板,射击靶距应在有效射击范围内尽量大,结合靶场实际条件选择了58 m的靶距。
某转管航炮在研制过程中,使用外弹道数学模型和转管航炮系统冷校靶结果进行了瞄准符的计算。在热校靶试验时,由于还未在火控系统中引入热校靶结果,试验人员发现瞄准符和实际的弹着点存在一定偏差,航炮的射击精度并不高,在如图7所示的坐标系下的36次射击结果如表2所示。
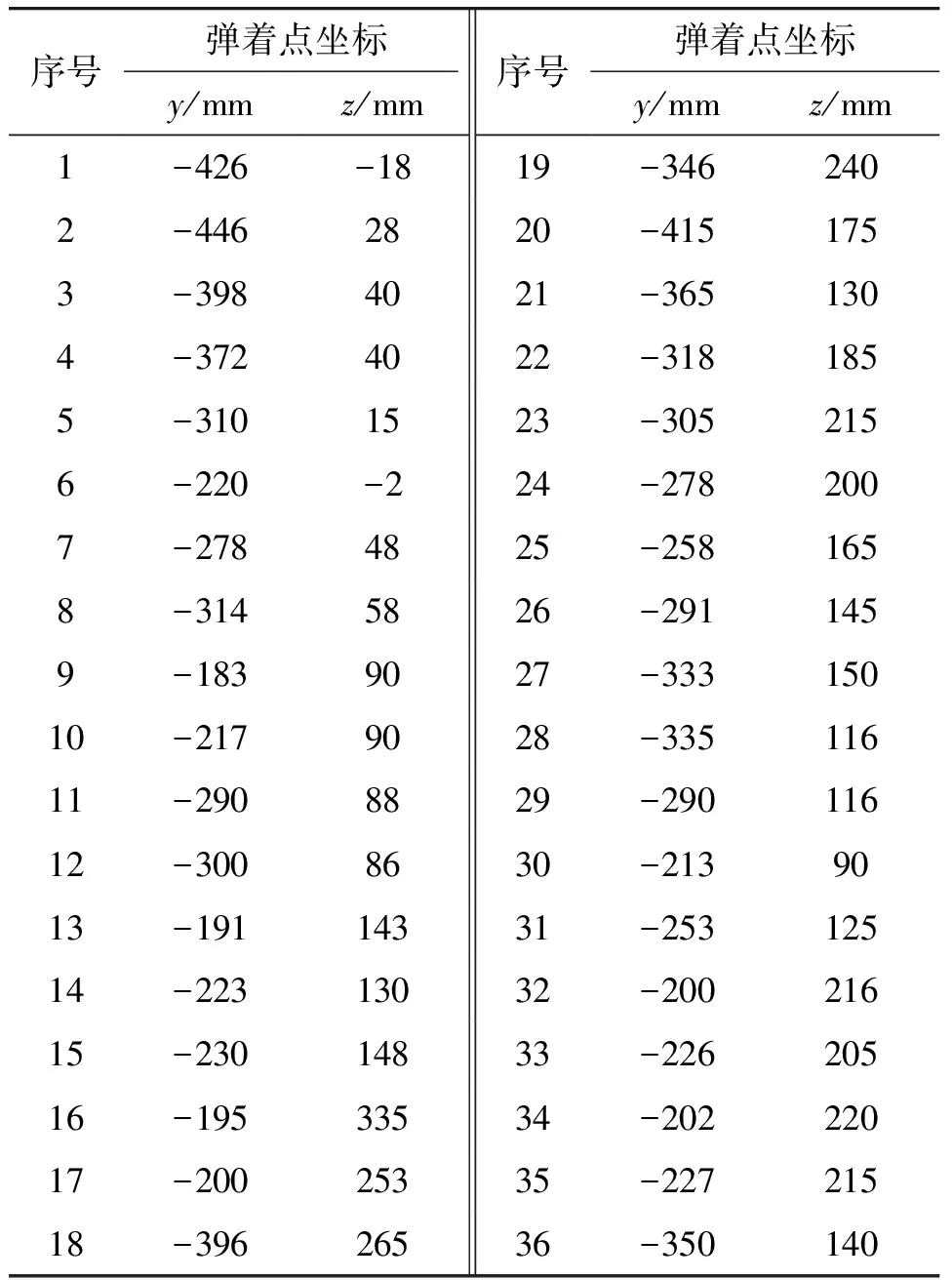
表2 地面试射结果
通过外弹道数学模型和冷校靶结果可计算得航炮的理论弹着点为(-230 mm,17 mm),两个方向上的误差率分别是:
由结果可见转管航炮的实际弹着点与理论弹着点在竖直方向上存在较大误差,与热校靶误差来源理论分析一致。由试验结果可计算得到航炮在航向和俯仰上的热校靶误差如下:
将航向和俯仰方向上的误差修正到飞机的火控软件中,经过转管航炮空空靶试和空地靶试后,证明转管航炮火控系统精度良好,飞机瞄准符与航炮准心一致性高,整套精度修正方法得到了试验验证。
4 结束语
笔者介绍了国内外航炮的精度修正方法,分析了转管航炮外弹道的误差来源,根据工程研制实际,提出了由转管航炮外弹道理论模型、转管航炮冷校靶、转管航炮热校靶组成的精度修正方法对误差来源进行修正,并通过实弹靶试对精度修正方法进行了验证,对于我国转管航炮的精度修正具有借鉴和指导意义。
