计及不对称故障影响的感应电动机负荷模型解析算法
2023-11-01李程昊范延赫马俊先刘明洋
郭 宁,李程昊,范延赫,马俊先,刘明洋
(1.国网宁夏电力有限公司,银川 750010;2.国网河南省电力公司电力科学研究院,郑州 450052;3.天津大学电气自动化与信息工程学院,天津 300072;4.国网宁夏电力有限公司经济技术研究院,银川 750002)
在现代电力系统负荷结构中,感应电动机负荷是影响电力系统故障后电压恢复和安全稳定分析的关键因素之一[1-2]。据统计,感应电动机负荷在电力系统负荷中占比近70%,因而系统故障发生后短时间内的负荷动态变化主要是由感应电动机造成的[3]。随着智能化电网设备的快速发展,感应电动机负荷模型的非线性及负载结构复杂化导致电力系统保持安全稳定运行的要求逐渐提高。鉴于动态负荷模型直接影响系统的稳定计算结果,动态负荷模型的建立要求也越来越严格[4-6]。因此,建立准确可靠的感应电动机动态负荷模型是电力系统负荷建模和稳态仿真计算所必需的[7],值得深入研究。
关于感应电动机负荷模型的研究,学者广泛采用的方法包括试验法[8]、解析法[9]、时域仿真法[10]、铭牌数据估计法[11]等。试验法通过空载试验和堵转试验确定感应电动机运行特性参数,利用电压跌落发生器产生的波形来反映电动机的输出响应[12],所确定的电动机负荷模型较为精准,但该方法步骤不易操作、耗时多且成本昂贵。解析法基于电路原理和电机理论来展示电动机的工作特性,可以准确地创建感应电动机仿真模型,但所需数据在实际工作中不易获取。时域仿真法通过时域暂态仿真软件模拟实际电网故障时电动机的动态模型,能够较好地拟合实际曲线,应用比较广泛,但拟合同一故障可能产生多组参数,导致拟合过程繁琐且费时[13]。铭牌数据估计法通过计算程序直接求得辨识感应电动机的负荷稳态等值电路参数[14],其所需数据在实际工程中容易获取,但通过辨识计算后得到的参数精度低,模型准确性不能保证。
目前,解析法尚未取得突破,无法准确计算出电压跌落后感应电动机的状态变量和响应结果。文献[15]利用理论公式推导,忽略电动机定子电阻的变化和故障扰动期间母线直轴电压的波动,构建了一种利用极坐标表示的感应电动机三阶机电暂态仿真模型。文献[16]将感应电动机T 型等效电路拓扑结构与泵类负荷机械特性相结合,提出了一种新型负荷建模方式,得到的负荷模型更贴近工程实际。文献[17]对感应电动机一阶机械暂态模型进行解析计算,得到感应电动机暂态转差变化后,利用感应电动机稳态等效电路计算暂态电流和暂态功率,但获得的无功功率精度较低,不能准确得到扰动后感应电动机的全部状态变量。
另外,现有研究采用的仿真模型多是基于三相对称正序电压推导的感应电动机三阶暂态模型,由于三阶机电暂态模型与实际感应电动机负荷动态特性不匹配,所得感应电动机负荷失稳条件也不精确,导致在发生不对称故障时其计算精度不高[18]。
针对上述问题,本文提出一种计及不对称故障电压跌落下感应电动机模型解析算法。首先基于转子一阶机械暂态方程获取感应电动机的转差率,然后再开展各项计算,最后在多场景中仿真分析不对称故障电压跌落下感应电动机的动态响应,验证了所提方法的可行性。与传统解析法相比,本文算法避免了时域仿真的繁琐计算,极大简化了运算过程,能够快速评估不对称故障电压跌落下感应电动机的动态响应特性。同时,本文从电压稳定和参数辨识的角度对三阶机电暂态模型和一阶机械暂态模型进行比较,为工程应用中模型选择提供依据。
1 感应电动机动态特性解析算法
本文提出一种计及不对称故障电压跌落下感应电动机模型解析算法,其算法流程如图1所示。

图1 计及不对称故障的感应电动机负荷模型解析算法流程Fig.1 Flow chart of analytical algorithm for induction motor load model considering asymmetric faults
1.1 感应电动机的转差率
1.1.1 三阶机电暂态模型
感应电动机的暂态等效电路如图2所示,在分析电磁暂态特性时,本文忽略了定子绕组的影响。图2 中,s为定子电压;Rs为定子电阻;s为定子电流;X'为折算后的转子短路电抗;为折算后的转子暂态电动势。

图2 感应电动机暂态等效电路Fig.2 Transient equivalent circuit of induction motor
基于图2所示等效电路,感应电动机三阶机电暂态响应可表示为
其中
基于图2所示的感应电动机暂态等效电路,本文搭建了如图3所示的供电系统,其中电源(G)向感应电动机(IM)供电,线路阻抗为Zeq=Req+ jXeq。

图3 供电系统示意Fig.3 Schematic of power supply system
图3 中,Eeq为电源电压;Peq为送端发电机有功功率;Qeq为送端发电机无功功率;Req为线路电阻;Xeq为线路阻抗;Um为电动机电压;Pd为感应电动机有功功率;Qd为感应电动机无功功率。
由于感应电动机一般不接中性线,故只需分析正序和负序电压分量对感应电动机的影响,无需考虑零序电流。基于三阶机械暂态模型,忽略转子绕组自身的电磁暂态特性,可以得到感应电动机的一阶机械暂态方程,具体分析过程如下。
送端感应电动机的功率(Peq+jQeq)与受端感应电动机的功率(Pd+jQd)满足如下关系:
电动机侧正、负序电压为
1.1.2 扰动后感应电动机的角速度及转差率
当系统发生不对称故障时,感应电动机的转速方程为
式中:K1和K2为常数项系数;Um1、Um2分别为电动机电压的正序、负序分量有效值。
电压跌落清除后,定子电压中不含负序电压分量,转子运动方程也不再含负序电磁转矩,即

在故障清除后,感应电动机的转子角速度经过一段时间才逐渐恢复。故障清除结束后感应电动机角速度wm-after的近似表达式为
基于故障期间感应电动机的角速度wm-dur和故障清除后感应电动机的角速度wm-after,可计算得到感应电动机的转差率s。
1.2 暂态电动势的变化
基于感应电动机转差率及暂态电动势的偏微分方程,可得到暂态电动势的变化。
基于式(9)和式(10)可以得到不对称故障期间感应电动机的暂态电动势微分方程为
其中

1.3 扰动后感应电动机的电流变化和功率响应
基于第1.2节中故障期间暂态电动势的变化情况,可以获取扰动后感应电动机的电流变化和功率响应。

感应电动机有功功率Pd和无功功率Qd可以表示为
式中:Pd1、Qd1为感应电动机有功功率正序分量、无功功率正序分量;Us,d1、Us,q1为定子侧d、q轴电压的正序分量。
式中:Pd2、Qd2为感应电动机有功功率负序分量、无功功率负序分量;上标*表示共轭值。
2 负荷模型比较
忽略定子绕组的电磁暂态特性时,可以得到如式(1)所示的三阶机电暂态模型,进而再忽略转子绕组的电磁暂态特性,则可以得到一阶机械暂态模型,即
式中:M为惯性时间常数;scr为临界转差率。
1)电压稳定指标
首先从电压稳定指标角度比较三阶机电暂态模型和一阶机械暂态模型的精度。不同类型的感应电动机参数如表1所示。

表1 感应电动机参数Tab.1 Parameters of induction motors

表2 感应电动机电压稳定指标Tab.2 Voltage stability indices of induction motors
2)参数可辨识
参数可辨识是指基于负荷模型的输入输出响应,能够唯一地辨识模型中的参数,模型自身的结构决定了参数能否唯一辨识。
对于三阶机电暂态模型(见式(1)),若将扰动后稳态作为附加条件则模型参数是唯一可辨识的。
对于一阶机械暂态模型(见式(21)),利用改进遗传算法得到的辨识结果如表3所示。可以看出,参数Tm和X'能够辨识,但无法辨识M和scr,只能辨识两者的乘积M·scr。

表3 一阶机械暂态模型辨识结果Tab.3 Identification results of 1st-order mechanical transient model
结合上述分析,在电压稳定指标精度和参数可辨识方面,三阶机电暂态模型优于一阶机械暂态模型。
3 实验结果与分析
为了验证本文提出的感应电动机负荷模型解析算法对于不同故障类型和不同电动机参数的适应性,本文利用电磁暂态仿真程序PSCAD/EMTDC,搭建10 kV 供电系统仿真模型如图3所示,对应的感应电动机负荷模型参数如表4所示。

表4 感应电动机负荷模型参数Tab.4 Parameters of induction motor load model

3.1 对称故障电压跌落
在对称故障跌落场景中,采用1 MW电动机,具体参数如表4所示。假设在t=0.2 s 时电源发生持续0.2 s的对称故障电压跌落,电压跌落前电源电压Eeq的三相电压分别为Eeqa,pre=1.0 p.u.∠0° 、Eeqb,pre=1.0 p.u.∠-120°、Eeqc,pre=1.0 p.u.∠120°;电压跌落期间电源电压Eeq的三相电压分别为Eeqa,dur=0.6 p.u.∠0° 、Eeqb,dur=0.6 p.u.∠-120° 、Eeqc,dur=0.6 p.u.∠120°。对称故障电压跌落期间,采用不同方法得到的感应电动机动态响应和PSCAD 计算结果对比如图4所示。

图4 潮流样本生成耗时曲线Fig.4 Time consumption curve for power flow sample generation
可以看出,图4(a)~(b)中本文方法与文献[17]解析法两种方法的结果并无差异;图4(c)~(d)中本文结果与PSCAD 计算结果更加匹配。由于文献[17]未考虑感应电动机暂态电动势的变化,尤其是得到的定子端电流与无功功率的动态响应结果与PSCAD 结果差异较大,计算精度欠佳。同时,由于文献[17]解析法没有考虑定子绕组的电磁暂态过程,在电压跌落和清除时,其计算结果会发生突变。
4.2 不对称故障电压跌落
在不对称故障跌落场景中,采用1.4 MW 电动机,具体参数如表4所示。假设在t=0.2 s 时电源发生持续0.2 s的不对称故障电压跌落,电压跌落前电源电压Eeq的三相电压分别为Eeqa,pre=1.0 p.u.∠0° 、Eeqb,pre=1.0 p.u.∠-120° 、Eeqc,pre=1.0 p.u.∠120°;电压跌落期间电源电压Eeq的三相电 压 分 别 为Eeqa,dur=0 p.u.∠10° 、Eeqb,dur=1.0 p.u.∠-130°、Eeqc,dur=1.0 p.u.∠130°。不对称故障电压跌落期间,采用不同方法得到的感应电动机动态响应和PSCAD计算结果对比如图5所示。
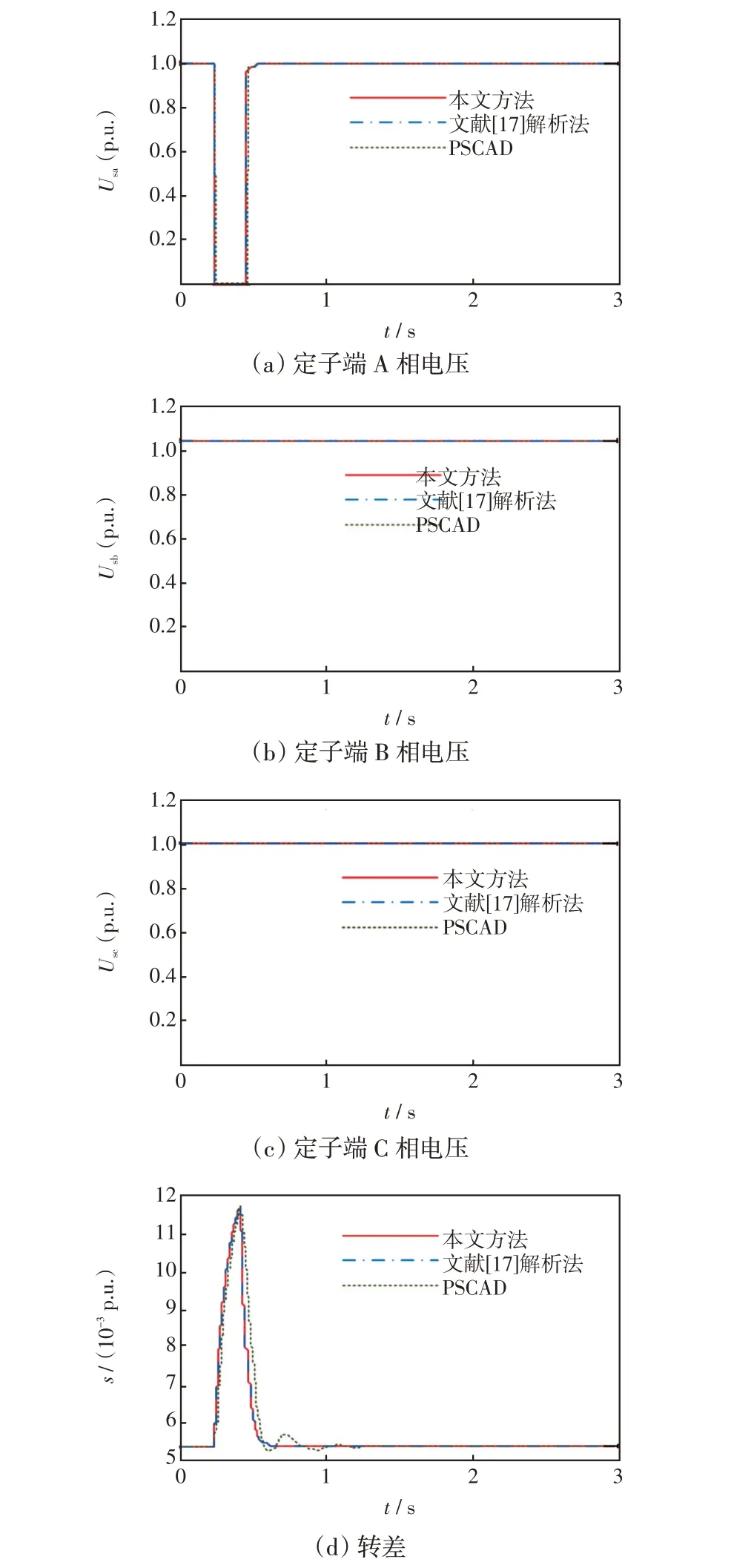

图5 不对称故障电压跌落时感应电动机的动态响应结果Fig.5 Dynamic response results of induction motor when asymmetrical fault voltage drops
可以看出,图5(a)~(d)中本文方法与文献[17]解析法的结果并无差异;图5(f)~(i)中,本文结果与PSCAD 计算结果更加匹配。相比于PSCAD 的动态响应结果,本文方法与PSCAD 计算结果吻合较好。相比于文献[17]所述解析法的结果,本文提出的解析算法显著提高了电磁暂态仿真的精度。
综上所述,本文在文献[17]的基础上,利用转子暂态电动势微分方程的相量形式,实现了感应电动机三阶机电暂态模型的联立求解,所提方法能够更加精确地求解不同故障电压跌落场景下感应电动机的转差、电动势、功率和电流。
4 结论
本文提出了一种计及不对称故障影响的感应电动机负荷模型解析算法。首先基于转子一阶机械暂态方程获取感应电动机的转差率,然后再展开各项运算分析获取扰动后感应电动机的电流和功率响应,相比传统解析算法极大地精简了运算过程和难度。同时,从电压稳定和参数辨识的角度对三阶机电暂态模型和一阶机械暂态模型进行比较。主要结论如下。
(1)本文所提的计算模型均为代数表达式,与基于电力系统机电和电磁暂态方程联立求解的方法相比,避免了繁琐的推导计算,能够直观获取响应结果且便于结果分析。
(2)对于不对称故障时感应电动机的动态响应,本文方法与PSCAD 计算结果吻合较好,保证了计算准确度,表明本文方法有利于电力系统稳定性分析计算。
(3)对比分析两种模型可知,三阶机电暂态模型在稳定指标、可辨识性方面更具有优势。
