一种高速列车矢量控制模型设计与应用
2023-10-24王巧丽张俊霞陈锡文
王巧丽 张俊霞 陈锡文

摘 要:高速列车电源各种参数的要求不断提高,电力拖动控制方法直接影响整个高速列车的运行安全,本文根据高速列车发动机的拖动特性,设计了用于高速列车电机控制的矢量控制模型,在MATLAB/ULINK环境下进行了仿真分析,仿真结果验证了本方法的合理性。
关键词:电力拖动 机载发电机 矢量控制 MATLAB/ULINK
1 引言
为了保证高速列车电源稳定性能,优化机载发电机的特性,本文在高速列车的高速电力拖动结构设计的基础上,对系统的调速控制系统进行了大量的研究。拖动系统主要由计算机、异步电动机、变频器、增速装置以及各种交、直流发电机组成,新的电力拖动系统采用交流变频电机与变频闭环调速系统对高速列车机载发电机的速度进行控制。对新的模型进行了模拟仿真,结果发现,新的高速列车矢量控制模型能够改善其动力性能,系统变得更加高效稳定。
2 系统建模
电力拖动系统的异步电动机矢量变换控制系统可实现高性能调速,进行实际的异步电动机控制前需要对电机矢量控制系统进行仿真分析,此处先分析异步电机的仿真模型,优化优化电力拖动系统的转速,对其磁链闭合改进,设计新的PWM调速与控制模型——APWM模型,使用MATLAB仿真验证新方法的高效、可靠、精确。
已有的文献资料显示:异步电力拖动设备具有高阶非线性等特点,其模型基本是多输入、并行处理、多输出结构,常见的高速列车矢量控制模型属于强耦合多变量控制系统,电磁矩由磁通和电流相互作用而产生,转速和磁通产生旋转电动势,所以高速列车电力拖动数学模型属于非线性系统。本文将转子看成等效转子,并且确定其子侧,折算成等效绕组。三相绕组A、B、C的空间定义三相电流坐标静止,异步电动机的数学模型有电压方程、磁链、运动方程组、转矩组等四大部分[1]。
2.1 改进磁链矩阵
对角线元素为自感,非对角元素为互感,此处磁链矩阵的对角元素等于漏感、电感、矫正因子之和[2],校验因子为经验误差的平均值,式中存在的情况,同时存在选定元素与转置元素的磁链因子相等的情况用于改进磁链矩阵的研究,对角元素满足如公式1和公式2所示的约束,构筑如公式3所示的新的高速列车电力拖动系统磁链矩阵,满足转置分量的控制值相等,相位差为,磁链矩阵的转置不会改变力矩的合成。
(公式1)
(公式2)
(公式3)
(公式4)
2.2 电压方程
在前面的改进磁链方程基础上构建三相的绕组电压平衡方程[3][4],三相转子组绕归算到定子侧得出电压降矩阵,存在关系,且满足式4关系,为对角相位电感,三相电压通过电感磁通量的调整进行矫正,提高电机输入电压的精度,对PWM调制过程中的控制模型的三相输入电压进行谐振频率的实时跟踪与矫正,提升调速系统的工作效率与响应速度。
(公式5)
式中为输入的三相电流,三相内阻,为三相电感,得到如下电压方程。
(公式6)
(公式7)
2.3 转矩方程设计
前面考虑了测试系统的电磁链、电压方程基本遵循平衡法则,同时引入了校验因子用于判断新的电力拖动系统的改进是否可靠,由此确定磁动势能储存关系,通过PWM构造新的转矩方程,提高控制系统的控制精度。
(公式8)
其中,表示磁动势能,表示连续t秒时间段的电流,表示j元素电感,为平均校验因子。电磁转矩依赖电流不变,当机械位移磁场发生变化时偏移角为,结合磁动势能存储关系得到如公式8所示的具有多变量、非线性的强耦合主电机转矩方程,其中为主电机的转矩,为主电机的转速,为磁链矩阵内元素的电感,三相电的偏移角的等差值为,为相位电感。
(公式9)
2.4 电力拖动系统主电机转轴运动方程
高速列车测试的电力拖动系统主电机转轴的转矩与转速的关系可以通过电磁转矩、负载转矩、与转速成正比的阻尼系数、机组转动惯量、扭转弹性转矩系数、电机极性对数和校验因子等因素表达[5~9]。
(公式10)
设计测试电力拖动系统的系统主电机转轴运动方程,当转矩和转速成正比时,且阻尼系数和扭转弹性力矩系数等于0时,存在如公式10所示的关系,其值与初始转矩、转速、相移有关。
(公式11)
2.5 电力拖动系统主电机模型
当电力拖动系统的转矩负载恒定时,三相异步电机呈现非线性多变量关系。电力拖动系统的三相异步主电机的强耦合、非线性的关系可以从磁链、转矩方程体现,存在定子、转子之间的强耦合,保证转矩方程中定子、转子之间磁場相互影响,用坐标变换手段加以修正,得出电力拖动系统的三相异步交流电机的直流等效模型,可以根据驱动电机的转矩、相移修正动力系统的三相输入电压。
(公式12)
3 系统仿真
3.1 系统模型体系
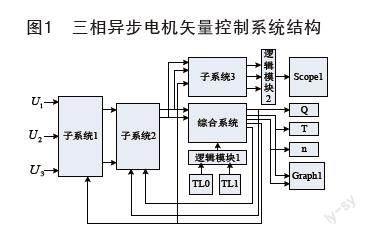
前面已经建立了高速列车电力拖动系统三相异步主电机的系统模型,进行了矢量控制分析,得到三相定子转子关系,设计如下电流、电压、磁链等价变换坐标模型[10],推导静止三相坐标,根据三相坐标系确定系统的转换,获取转子磁场方向坐标系。按照列车动力系统的矢量控制方程,采用MATLAB的SIMULINK对三相旋转异步电机模型进行仿真分析。高速列车电力拖动系统三相异步主电机的仿真结构如图1所示,系统将对电机、旋转电机、U/I变换和选择变换的三相坐标模型进行仿真,通过仿真结果判断新的控制模型是否有效。
3.2 系统仿真分析
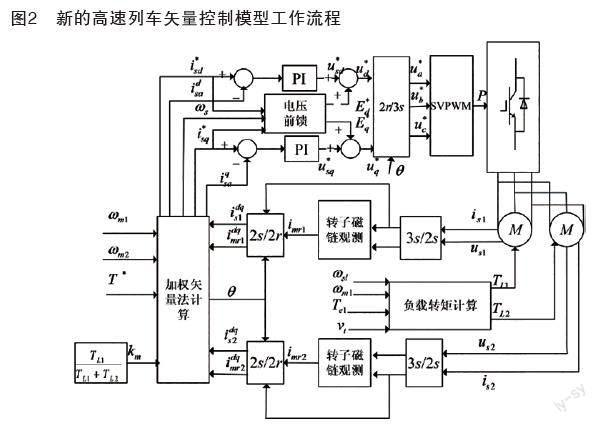
新的高速列车矢量控制模型电压转子的磁链观测值,对驱动系统的两个异步电机进行反电动势积分控制,根据积分的值获取电机转子的磁链,励磁电流Il、负荷电压Uload、调速频率Fadj和相移Pmov等变量结合,通过控制系统的运算模块得到输入功率、磁通量等信息,从而实现其动力匹配。由于高速列车在运行过程中的加速、减速、制动、动力系统的增加或者减少等动作需要人工干预,司机可以通过控制模块、手柄产生一个新的控制转矩,切换系统的工作模式来控制高速列车的牵引系统,新的高速列车矢量控制模型的框架如图2所示。给定m1和m2两个电机的转速信息和,同时给定目标转矩信息Taim,将转速信息和目标转矩信息输入数据初始化处理模块,进而获取两个驱动电机内部各个转子的内阻Rm1i、Rm2j、同时根据信息采集系统获知前5秒电机的输入电压、电流的历史值Uhis5_m1、Uhis5_m2、Ihis5_m1、Ihis5_m1,通过负荷预测算法结合APWM控制模块的脉宽值,获知两个电机的电压和电流反馈分量和电力负荷分类。新的高速列车矢量控制过程中需要考虑两个电机内部各个转子的磁链信息,控制模型调用权值矢量算法、电力负荷预测算法,为两个驱动电机提供最佳的输入电流和输入电压,新的高速列车矢量控制模型能够实现负载转矩的实时计算,结合两个电机的转子磁链观测实现两个驱动电机的实时控制,提高两个驱动电机的工作效率,同时防止高速列车的两个驱动电机不会因为超负荷而过热,减少电机因为超负荷过热的损坏概率。
根据前面的仿真模型结构,此处将验证该模型的正确性和合理性,选择仿真三相异步电机的性能参数:三相异步电机的总功率为111Kw,电机的极数为6(三个极数为2的异步电机组合而成),每个异步电机的定子内阻约1.88到1.91欧姆,转子内阻为1.43到1.50欧姆之间,定子的子感应为198mH,转子自感=195mH,电机的转动惯量为0.0071,额定转速,电机定子互感值为。把前面参数作为仿真模型的输入集合在MATLAB/SIMULINK下进行仿真分析。
(1)转动稳定性
在空载情况下启动异步电机,电机转动速度稳定,基本保持在1430RPM到1458.9RPM之间,呈现出短时间内工作稳定,长时间内转速存在偏差,电磁转矩存在一定的波动,但是波动在允许的范围内,证明在新的控制方法下三相异步电机转动稳定、可靠。
(2)满载电力拖动系统稳定验证
当三相异步电机满载运行启动时,电机输入电压为380V、50Hz交流电,电机运行进入稳定状态,电机基本能够在1.1秒内进入稳定状态,转矩基本不变,说明电机启动稳定,性能良好,可以完成全压满载启动。(3)新的电力拖动系统分析
电力拖动系统启动3秒后追加20N·m的负载,在6秒后追加12N·m的负载,10秒后突降16N·m的负载,电机转速发生了一定的变化,发热量变化不明显,电流有所增大,但是负载基本平衡,尽管测试过程中负载有增有减,但是转速波动、转矩波动并不明显。证明本文所设计的电力拖动模型能够很好的應用于电力拖动系统的电机控制。
4 实验验证
课题组2021年12月,多次在某电力机车集团的实验场地对CHR2019T-II系列动车进行测试,被测试的动车有10节车厢,每节车厢有座位100个,空车厢的重量为189201Kg,长为2412mm,列车的最高车速为385Km/h,测试区间为长沙南站到株洲西站的实车实路况测试。
测试过程中的最高时速为384.12km/h,平均速度为292.12km/h,电机的平均转速为2452RPM,没有采用矢量控制模型动力系统的高速列车最高时速为361.42km/h,平均车速为244.43Km/h,驱动系统电机的平均转速为2962RPM,由此可见平均转速减小了510RPM,采用矢量控制模型的高速列车的工作效率得到提升,发热量、工作效率、应对临时负载追加的能力同样因为矢量控制模型介入高速列车动力系统控制过程中而得到了一定的提升。
5 结论
本文建立了包含转矩、运动、主电机等五个模块的三相异步电动机的控制模型,之后对新的电力拖动方法在MATLAB/SMULINK环境中建立了三相异步电动机控制的矢量控制仿真模型,对异步电动机的变频调速矢量控制进行仿真分析,通过新的电力拖动方法进行仿真分析,验证了本算法的合理性。
参考文献:
[1]武迪,林荣文,田峰.异步电机矢量控制系统的仿真分析[J].电气开关,2020,58(02):11-13+18.
[2]孟建军,赵文涛.基于模糊故障树的高速列车电流互感器可靠性分析[J].模糊系统与数学,2021,35(03): 155-166.
[3]谷山强,孙镜堤,张瑞等.高速列车内部过电压形成原理及抑制措施研究[J].机车电传动,2020,No.274(03):51-55.
[4]孙宁,陈争,巨长磊等.高速列车接地系统对车体电流及过电压分布的影响分析[J/OL].铁道标准设计:1-10.
[5]李华,林飞,杨中平等.一种可提高转矩输出能力的高速列车牵引电机方波工况单环弱磁控制策略[J].铁道学报,2019,41(10):53-60.
[6]卢琴芬,孔浩,石佳蒙等.高速列车永磁同步牵引电机基于联合仿真模型的单脉冲控制研究(英文)[J].电工 技术学报,2015,30(14):61-66.
[7]朱海燕,尹必超,胡华涛等.谐波转矩对高速列车齿轮箱体与牵引电机振动特性的影响[J].交通运输工程学报,2019,19(06):65-76.
[8]赵心颖,林飞,杨中平等.高速列车牵引传动系统机电耦合振动特性研究[J].铁道学报,2018,40(09):40-47.
[9]朱海燕,黎洁,尹必超等.牵引电机悬挂参数对高速列车牵引传动部件振动特性的影响[J].交通运输工程学报,2023,23(01):156-169.
[10]Lu X ,Li Y ,Wu M , et al.Rail temperature rise characteristics caused by linear eddy current brake of high-speed train[J].Journal of Traffic and Transportation Engineering(English Edition),2014,1(06):448-456.