海杂波对机载雷达探测影响研究
2023-10-19李宏武王燊燊祁华峰
李宏武, 王燊燊, 徐 秦, 祁华峰
(1.军事科学院战略评估咨询中心, 北京 100091; 2.中国人民解放军93110 部队, 北京 100038)
0 引 言
随着世界军事格局变化,尤其是近年来美军亚太军事呈现的新局面,我国国家海洋安全面临前所未有的挑战,未来海战场面临着维护国家主权和领土领海完整、海洋权益与海洋资源争端、保卫海上贸易通道等尖锐问题。使用作战飞机对海面舰船目标实施跟踪监视,具有机动灵活、处置高效等特点。然而,机载雷达对海面目标进行搜索跟踪时,不仅能收到目标回波,还会收到大量海杂波,这些杂波对机载雷达探测会造成一定影响。对于海杂波,前人做了很多研究工作,文献[1]对海杂波典型幅度分布模型进行了仿真分析,文献[2]结合实测数据对海杂波进行建模分析,文献[3-6]给出了海杂波的各种计算方法。然而,现有文献[7-9]大都分析杂波的散射和分布特性,没有系统定量分析海杂波对机载雷达探测性能的影响。
本文重点研究海杂波对机载雷达探测性能的影响,给出了海杂波等效RCS 的计算方法,并通过综合信噪比、检测概率、测量误差等指标,定量评估海杂波对机载雷达的影响效应,并进行仿真分析,为机载雷达的设计和作战飞机的战术运用提供参考依据。
1 海杂波等效RCS 计算
对海杂波进行仿真,首先对其雷达散射特性进行分析。海杂波的雷达散射截面积定义为由杂波区反射造成的等效雷达散射截面积,平均杂波雷达散射截面积[3]为:
式中σ0为杂波散射系数。
1.1 海杂波散射系数
机载雷达对海面目标探测时,主要受海杂波影响[10]。机载雷达波束照射海面示意图如图1 所示。其中,擦地角ψg是海面与发射波束主轴间的夹角。

图2 照射区划分示意图
三个因素会影响雷达波束中的杂波,分别是擦地角、表面粗糙程度及雷达波长。在低擦地角的杂波常被认为是散布的杂波,在此区域内,雷达波束内有相当大数量的杂波回波。在平坦区域,σ0对擦地角的依赖程度很小。在高擦地角区,杂波更多的是镜面反射,此时散布杂波成分消失,在该区域,光滑表面比粗糙表面具有更大的σ0,这与低擦地角情形正好相反[4]。对海面散射系数的估算,比较常用的有SIT 模型、GIT 模型、TSC模型和HYB 模型,这4 种模型考虑了入射角、海况、风向、雷达波长和极化等参量,其中TSC 模型适用于雷达频率范围为0.5~35 GHz 时后向散射系数的估计,应用范围广。在该模型中,对于水平极化方式,海杂波后向散射系数[5](单位为dB)公式如下:
式中:ψg为擦地角(单位为rad);GA为擦地角因子;Gu为风向因子;Gw为风速因子;λ为雷达波长(单位为m)。
擦地角因子GA为:
式中:σz为海表面高度标准差(单位为m),σz=,Sstate为道格拉斯海况级别。
风向因子Gu为:
式中:φ是风向和雷达视线探测方向的夹角(单位为rad);B可随实测数据进行调整,一般大于0.25 即可。
风速因子Gw为:
式中:
针对垂直极化方式,海杂波后向散射系数(单位为dB)公式如下:
上述计算中尚未包含镜面反射分量,镜面反射分量为:
式中:
因此,海杂波模型总的散射系数为:
研究者们已经详细分析过散射系数随着极化方式和风向的变化,然而,这些变化通常足够小,以致于被风级或海浪的不确定性掩盖,因此在精度要求一般的仿真中可不考虑极化和风向的影响。对大多数情况,海面反射系数可用下式估算[6]:
式中:Sstate、ψg、λ分别为道格拉斯海情级别、擦地角、雷达波长。
1.2 杂波区域
考虑下视模式下的末制导雷达,天线波束与海面相交的区域形成一个椭圆形状的照射区,照射区大小是关于擦地角和波束宽度的函数,照射区划分示意图见2。
照射区被分为很多个地面距离单元,雷达在照射方向上的距离分辨单元为cτ/2,这里τ是脉冲宽度。结合波束擦地角,根据几何关系可计算得到每个单元的地面投影宽度为cτsecψg/2,该区域长度可近似为椭圆短轴距离Rθ3dB,则杂波区域面积近似为:
但是,当地面投影宽度cτsecψg/2 超过椭圆长轴Rθ3dBcscψg时,此时照射区域为整个椭圆,其面积近似为cscψg/4。因此有:
2 海杂波对机载雷达影响效应
2.1 综合信噪比
在机载雷达接收机的输出端,目标回波信号总是和噪声及海杂波混杂在一起,雷达检测能力取决于综合信噪比[11]。接收机噪声用噪声系数NF来衡量,它定义为实际接收机的输出噪声功率与理想接收机的输出噪声功率之比。接收机噪声模型可以表示为一个服从均值为0、方差为σ2n的正态分布,噪声平均功率为:
式中:k为波耳兹曼常数,k=1.38×10-23;T0为接收机参考温度;Br为接收机带宽。一般情况下,噪声系数NF的取值范围为:0<NF<10 dB。
机载雷达从海面目标接收的回波功率为:
式中:Pt是峰值发射功率;G是天线增益;σt为目标RCS;λ是波长。
雷达从海杂波区域接收到的杂波功率为:
计算综合信噪比时要考虑回波信号、杂波信号和噪声信号的影响,结合以上分析,可以得到机载雷达综合信噪比为:
2.2 检测模型
雷达对目标的单次检测概率与目标起伏类型、检测准则相关[12-14],根据雷达脉冲幅度起伏情况,雷达领域定义了四种信号类型,分别是确知信号、未知相位信号、斯韦林Ⅰ、Ⅱ型和Ⅲ、Ⅳ型回波信号。确知信号是幅度和初相固定的信号,未知相位信号为相位变化的信号。
设雷达检测器输入端信噪比为Sn,平均信噪比为,虚警概率为Pfa,对于单个脉冲检测,检测概率[4]为:
式中:Φ(x) =为Φ(x)反函数,x为检测门限。
斯韦林Ⅰ、Ⅱ型目标单个脉冲检测概率为:
斯韦林Ⅲ、Ⅳ型目标单个脉冲检测概率为:
机载雷达在对目标的探测过程中,可能会产生多个照射脉冲,即多脉冲累积检测,此时雷达会通过脉冲积累来提高检测概率。设单个脉冲检测的平均信噪比为Sˉn,积累脉冲数为N,则雷达对目标的积累检测概率与目标起伏类型相关。
非相参积累条件下,检测概率为:
2.3 测量误差模型
机载雷达的参数测量误差与信噪比直接相关,设监视雷达单个脉冲信噪比为Sn1,非相参积累脉冲数为n,当n较大时,可用近似累积增益。此时测距误差[6]计算为:
式中:B为信号带宽;c 为光速;τ为脉冲宽度。
机载雷达可以测量目标的径向速度,径向速度测量误差为:
式中λ为雷达工作波长。
机载雷达测角误差为:
式中θ0.5为波束宽度。
如果θ0.5为方位波束宽度,则σθ为方位角测量误差;如果θ0.5为仰角波束宽度,则σθ为仰角测量误差。
3 仿真分析
通过计算机仿真对海杂波反射系数和机载雷达探测性能等进行分析,仿真参数如表1 所示。
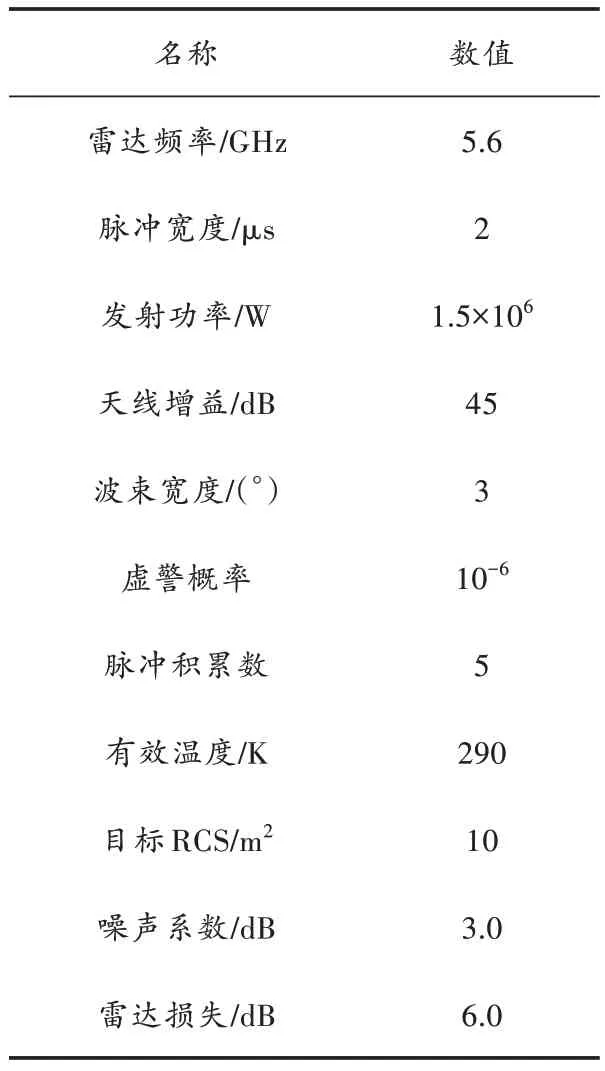
表1 仿真分析中雷达性能参数
仿真得到的海面反射系数与海情级别的关系如图3 所示,海面反射系数与擦地角的关系如图4 所示。固定擦地角为70°,机载雷达探测综合信噪比与距离的关系如图5 所示。

图3 反射系数与海情级别的关系曲线

图4 反射系数与擦地角的关系曲线

图5 综合信噪比与距离的关系曲线
固定雷达和目标的距离为50 km,机载雷达探测综合信噪比、探测概率、测距误差、测速误差、测角误差与擦地角的关系分别如图6~图10 所示。

图6 综合信噪比与擦地角的关系曲线

图7 探测概率与擦地角的关系曲线

图8 测距误差与擦地角的关系曲线

图9 测速误差与擦地角的关系曲线

图10 测角误差与擦地角的关系曲线
由图可以看出,海面反射系数随海情级别和擦地角的增加而增大,在海情级别超过5 时,反射系数迅速增大,此时海杂波影响较大。
在擦地角固定时,雷达探测综合信噪比随距离减小逐步增加,这是由于随着距离减小,杂波等效RCS 在不断减小,从而综合信噪比不断增加。在距离固定时,综合信噪比随擦地角增加逐步降低,在擦地角较小时,降低较明显,在擦地角较大时,信噪比几乎不变,这是因为在大擦地角时,杂波区域基本等于波束椭圆面积,其变化较小。
由图7 可知,机载雷达探测概率随擦地角增加迅速减小,在擦地角为20°时,对轻浪海况探测概率几乎降至5%以下。雷达的测距、测速、测角误差随擦地角增加不断增大,其趋势相似,当擦地角较大时,误差基本不变,这是由于测量误差与综合信噪比相关。
4 结 语
本文研究了一种定量分析海杂波对机载雷达影响效应的方法,通过经验公式建立海杂波散射系数计算模型,根据雷达距离和角度分辨力计算杂波区域,从而得到杂波的等效RCS。在此基础上,以综合信噪比、探测概率和测量误差等建立影响效应评估指标,给出了各指标的定量计算方法。仿真结果给出了海杂波散射系数、综合信噪比、探测概率、测量误差等随海情级别、擦地角的定量变化情况,得出在小擦地角时,机载雷达具有较好的探测性能。
为抑制海杂波影响,一方面可以在雷达信号处理中采用先进的海杂波滤除算法;另一方面可控制载机低空飞行,保持较小的擦地角。本文成果可为机载雷达的抗杂波设计和载机的战术运用提供参考依据。
注:本文通讯作者为徐秦。
