基于数学模型的水肥一体机的结构优化分析
2023-10-17焦学磊
焦学磊
(四川财经职业学院,成都 610101)
0 引言
我国是农业大国,种植面积广阔,农田用水和肥料使用量巨大。由于技术发展较为落后,我国的大部分农村仍然采用传统的先施肥再灌溉的浇灌方式,灌溉时间和施肥料完全根据人的经验确定。这种灌溉方式对于水的利用率还不到60%[1],化肥利用率仅为30%,不但造成了资源的极大浪费,而且由于化肥中的氮、磷等元素的流失造成环境的污染[2]。因此,亟需开发一款精准水肥一体化控制系统。
水肥一体机是一种利用压力管道将水、肥混合,采用滴灌或喷灌的方式共同作用于农作物的施肥技术[3-4]。与传统的灌溉方式相比,这种灌溉方式可以显著提高水肥利用率,降低肥料用量,减少土壤中的氮、磷等元素的流失,还可有效节约人工成本。然而,由于我国水肥一体机发展较晚,施肥器等并没有明确的国家标准规定,因此不能够保证设计的水肥一体机结构参数在作业时达到最优[5]。
目前,结构优化主要有两种方法:一是凭经验对若干方法进行比较,选择最优方案;二是采用建立数学模型的方法,利用计算机进行结构分析,从而确定最优结构。其中,第2种方法可以用有效地缩短产品设计周期,提高结构优化设计水平。本文将第2种方法应用于水肥一体机的结构优化。
1 结构设计
1.1 总体结构设计
水肥一体机的主要组成包括数据采集系统、灌溉施肥系统、自动控制系统和控制中心。
1.2 数据采集系统
数据采集系统主要对农田的环境(包括土壤温湿度、风速、光照强度、大气压和太阳辐射等)进行监测,并实时地将监测数据反馈至环境数据监测站点。为了实现数据的采集和传输,数据采集系统主要包括采集模块和无线传输模块。
数据采集模块的硬件结构如图1所示。其中,风速、太阳辐射和大气压力传感器通过1个传感器节点连接,并放置于室外;为了延长传感器节点的使用寿命,在节点外设置塑料保护盒;每4个土壤温湿度传感器通过1个节点连接,放置于土壤不同的深度位置;同时,每个传感器节点配置太阳能供电板用于供电。
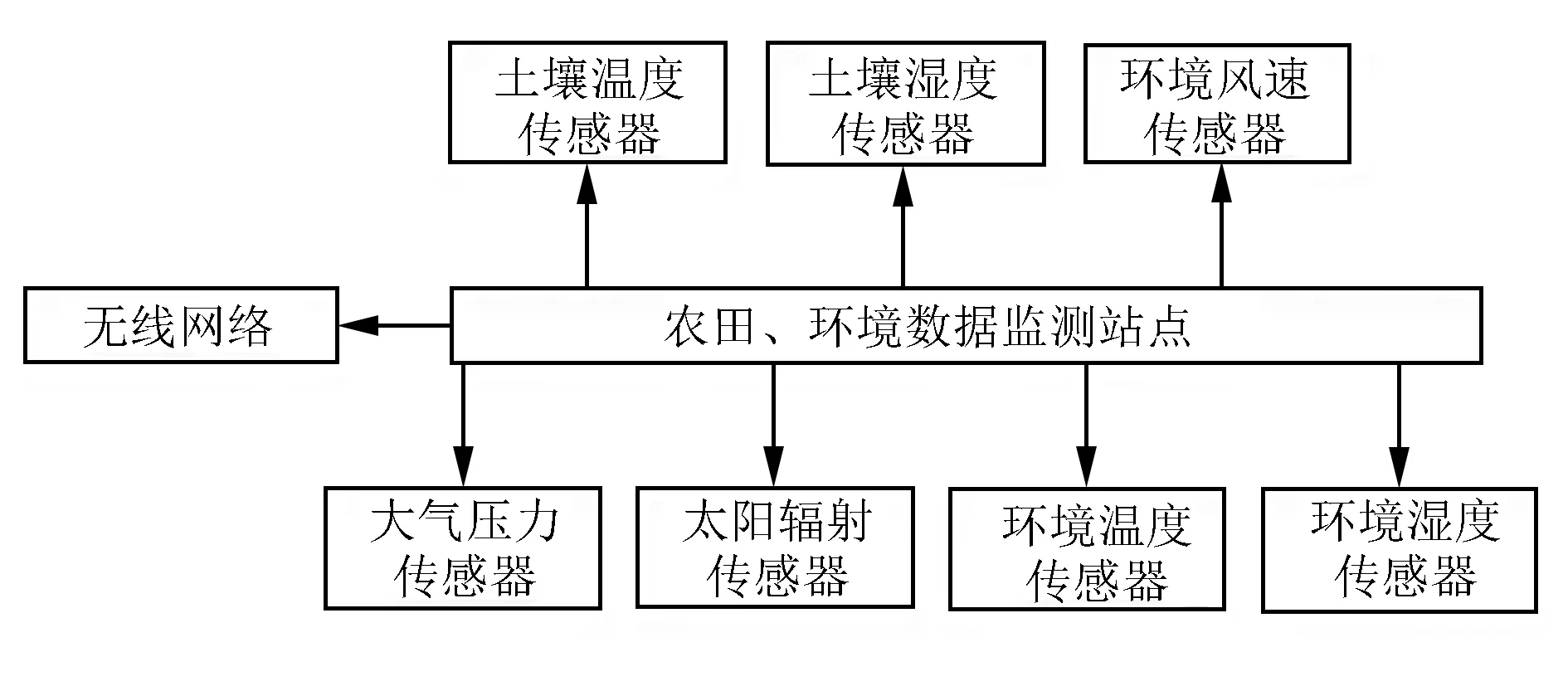
图1 数据采集模块硬件结构图Fig.1 The hardware structure diagram of data acquisition module
传感器节点完成数据的采集后,主要通过无线传输模块的网关节点实现数据的转发,并最终传递至监测站点。网关节点的主要部件包括数据转发器、电源、铅蓄电池和无线网桥等[6],如图2所示。
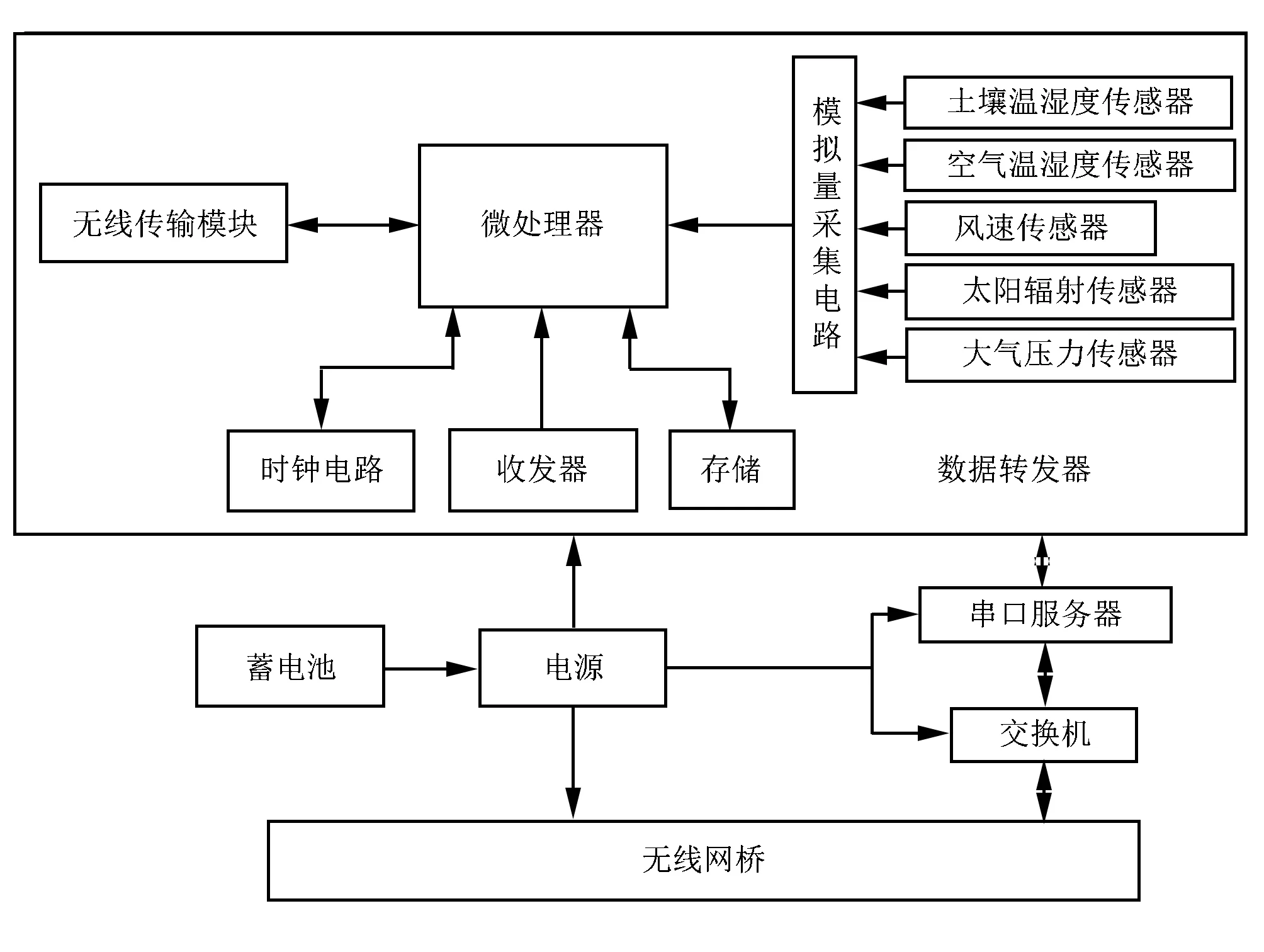
图2 网关节点结构简图Fig.2 The schematic diagram of gateway node structure
1.3 灌溉施肥系统
灌溉施肥系统主要用于实现肥料的混合和灌溉,包括均匀混肥模块、灌溉模块、监测模块和控制器,如图3所示。
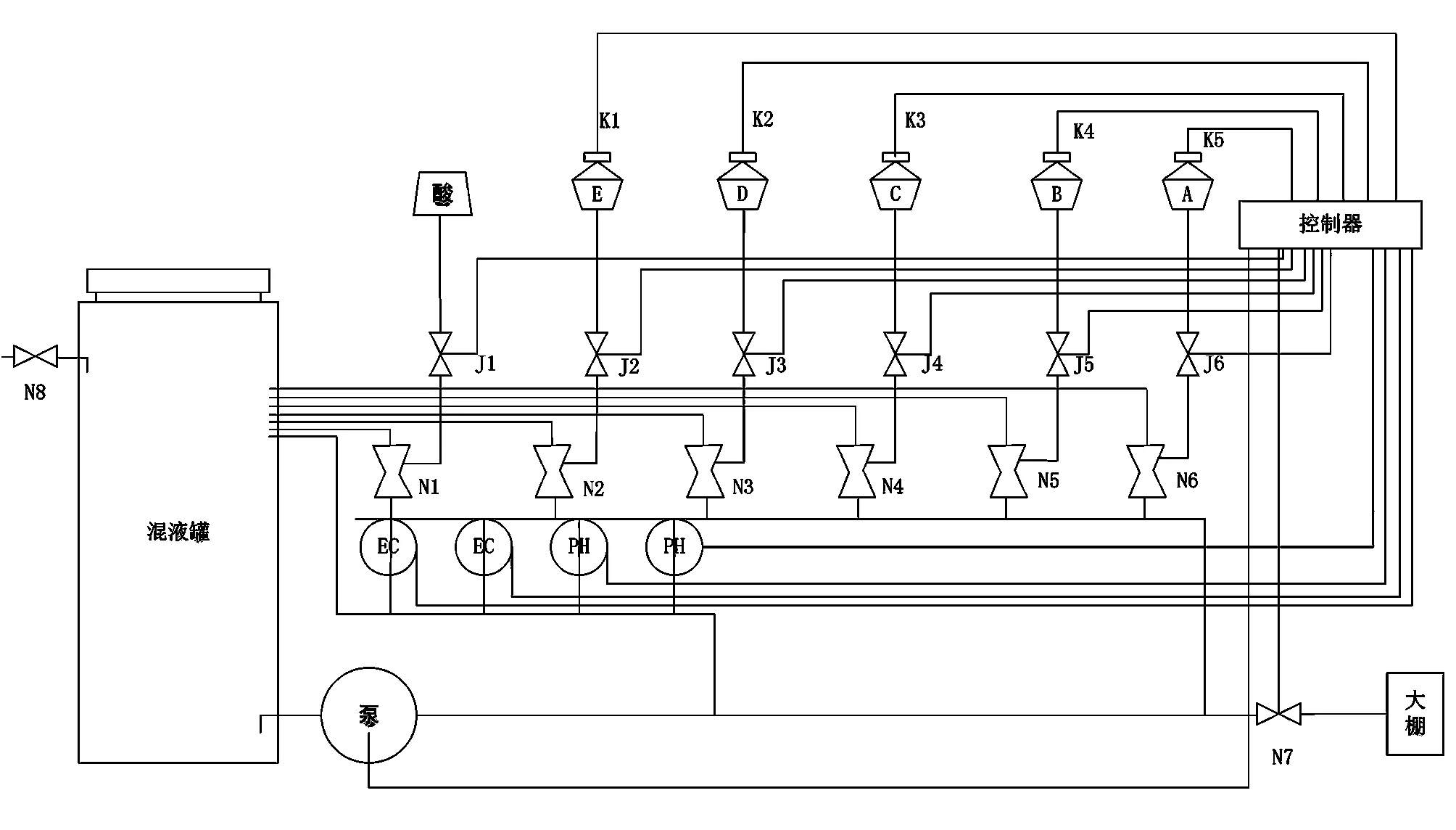
注:N1~N6为文丘里吸肥器;N7为灌区电磁阀;N8为浮球;J1~J6为吸肥电磁阀;K1~K5为称重传感器;A~E为不同成分肥料。图3 灌溉施肥系统结构简图Fig.3 The structure diagram of irrigation and fertilization system
为了实现肥料的精准配比,采用称重传感器进行不同成分母液的称重;同时,在文丘里管下方设置电磁阀,控制母液不同成分的配比;肥料最终进入混液罐,并利用浮球阀控制清水量。为了对肥料的EC值和pH值进行监测,混液罐液体通过灌溉泵后分为两路,分别用于灌溉和监测,最终控制肥料的EC值和pH值在要求范围内。
1.4 监控系统
监控系统的作用主要包括两方面,即监控土壤和环境的状态及监控灌溉施肥系统的作业状态,主要组成包括模拟量输入模块、监测仪表及触摸屏等。其中,模拟量输入模块用于接收采集的环境和土壤状态信息,并转化系统可识别信息。监控仪表用于显示灌溉肥料的EC值和pH值。触摸屏采用MT8012iP型号的人机界面触摸屏[7],该触摸屏与控制中心接通,将接收到的数据以曲线趋势或数字的方式实时显示并记录农田状态,还可以通过触摸屏控制水肥一体机自动或者手动运行。
1.5 控制中心
控制中心是整个水肥一体机的中枢,通过对收集的农田、环境和灌溉数据进行综合分析,完成开关量、施肥灌溉系统的启停等指令的控制。控制中心的程序逻辑图如图4所示。
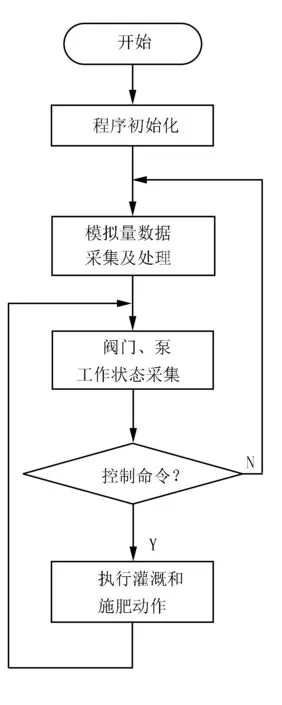
图4 控制中心程序逻辑图Fig.4 The program logic diagram of control center
其硬件的主要组成包括单片机系统、电源模块及时钟电路等。其中,单片机系统采用性能稳定、抗干扰能力较强的8位STC单片机,通过程序的设计还可以接收手机APP或电脑网站指令、读取时钟电路数据;电源模块的芯片采用稳压电源芯片,为了增加抗干扰能力,还增设了滤波电路;时钟电路则采用高性能芯片。
2 结构优化分析
为了实现精准的灌溉和施肥,需要文丘里吸肥器准确地将肥料注入混液罐。文丘里吸肥器对水肥一体机的吸肥、灌溉等作业能力影响最大。因此,采用数学模型的方法对文丘里吸肥器进行结构优化设计,并进行灌溉预测。
2.1 数学模型进行结构优化
文丘里吸肥器的结构简图如图5所示。
图5 文丘里施肥器结构简图Fig.5 The structure diagram of Venturi fertilizer
文丘里施肥器主要分为3部分,即收缩段、喉管和扩散段。通过对其结构进行分析,以吸肥器的中轴线作为基准线,可以得知肥料在进口处和喉管出符合以下能量方程,即
其中,p和p′分别为肥料在进口处和喉管的压力;ρ为稀释肥料的水密度;vm和vn分别为进口处和喉管肥料的流速;h1-0为肥料由进口至喉管的高度差。
对于方程中的参数,具有以下关系,即
其中,Qm和Qn分别为进口处和喉管肥料的流量;v′为肥料在文丘里吸肥器内部的平均流速。
能量方程中,不同位置肥料的流量可以通过查询流量对照表确定,肥料在进口处的压力可通过试验测得,因此可以通过以上方程确定喉管处肥料压力p′。假设肥料在流动过程中没有液体的损失,则可以根据液体的连续性方程确定文丘里吸肥器的流量Q满足以下方程,即
其中,h为吸肥器喉管中心与肥页面的高度差;S为吸肥器的横截面积;γ为肥料的体积力。
由此可以确定吸肥器的作业状态[8],即
吸肥器内部的肥料流动可以看作为不可压缩液体的流动,且流动过程不存在能量交换。因此,在进行肥料的流动分析时,可以不考虑温度场的变化。文丘里吸肥器内部肥料流动的控制方程可以表示为
其中,肥料的流速U为
其中,a、b、c分别为肥料流速在x、y、z方向的分量;μ为肥料的黏度系数;mx、my、mz分别为肥料质量力在x、y、z方向的分量;p0为肥料在管道处的压力。此时,可以确定文丘里施肥器的数学模型。通过采用ICEM软件对该数学模型进行分析,可以确定吸肥器吸肥性能达到最优(即吸肥流量达到最大值、水头损失最小且能够进行正常吸肥作业)时的参数如下:渐缩角α=20°,渐扩角β=8°,喉部直径d0=6mm。
2.2 灌溉预测控制算法优化
为了达到精确灌溉控制的目的,采用模糊控制和灰色预测结合的算法,对灌溉需水量进行预测。其中,灰色预测模型是进行预测的关键。首先,定义灰色预测模型为GM(m,g)。其中,m为模型中的微分方程阶数;g为模型变量的数量。由于灌溉用水采用流量控制方式,因此可以采用一阶模型,即GM(1,1)进行控制。假设当前灌溉水流量的横向量Q为
Q(0)=[Q(0)(1),Q(0)(2),...,Q(0)(m)]
对原始数据进行累加,可以得到
Q(1)=[Q(0)(1),Q(1)(2),...,Q(1)(m)]
对累加数据进行紧邻均值处理,可以得到
q(1)(i)=0.5[Q(1)(i)+Q(1)(i-1)],i=2,3,...,m
此时,确定预测模型GM(1,1)的白化方程为
其中,s为预测模型的发展系数;μ为灰色作用值。
对上式求解,并进行累加操作,可以得到预测序列为
此时,i+n时刻灌溉用水量预测值为
通过以上方法可以进行灌溉用水量的预测,达到精确灌溉的目的。
3 试验结果
由于本文主要针对文丘里吸肥器进行了结构优化,因此采用数值模拟的方式对吸肥器进行吸肥性能对比试验。文丘里吸肥器的结构在优化前后其吸肥性能对比结果如表1所示。
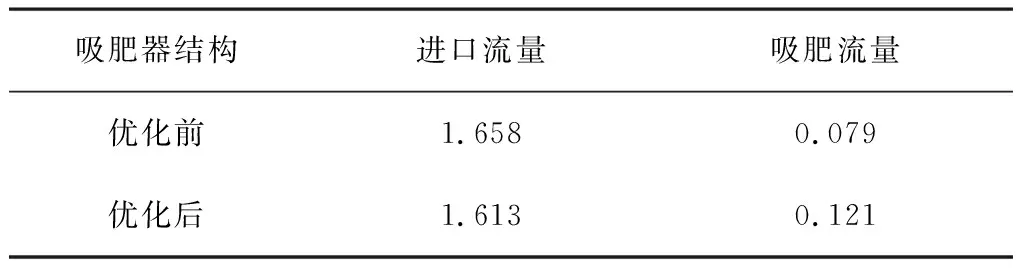
表1 对比试验结果Table 1 The result of comparative test m3/h
由表1可知:优化结构后的文丘里吸肥器的性能明显优于未优化结构前的性能,吸肥流量大约提高了25%。其后,采用该水肥一体机进行农田灌溉,观察其作业性能,结果表明:该水肥一体机可以正常作业,实现精准灌溉。
4 结论
1)针对传统的灌溉和施肥方式作业效率较低、水肥使用率较低的问题,基于数学模型对水肥一体进行结构设计并优化分析。水肥一体机的主要组成包括数据采集系统、灌溉施肥系统、自动控制系统和控制中心。
2)为了实现精准施肥和灌溉,采用数学模型的方法对文丘里吸肥器进行结构优化设计,并利用模糊控制和灰色预测结合的控制算法进行灌溉预测。
3)为了验证水肥一体机的结构合理性,进行了吸肥性能对比试验和灌溉试验,结果表明:该水肥一体机结构合理,可实现精准灌溉。
