基于ITN的网球陪练机器人的研制与测试
2023-10-14钮鸣宇钮德明
钮鸣宇 钮德明
基于ITN的网球陪练机器人的研制与测试
钮鸣宇1钮德明2
(1.广西医科大学,广西 南宁 530021;2.广西理工职业技术学院,广西 崇左 532200)
为在高校推行国际网球联合会推出的非职业网球选手水平评定的测试方法(简称ITN),研制了一种基于ITN的网球陪练机器人,并阐述了它的工作原理和结构特点。为验证它的功能和效果,进行了应用测试。测试结果表明:该机器人有助于初学者进行基础动作练习;有利于击球技术的巩固和提高;有效地增加了训练强度;解决了教练和场地不足的问题,提高了训练效果。该机器人应用于网球训练教学,具有成本低、功能强、效果好等特点,是一种值得推广的“机器教练”。
网球;陪练机器人;击球;球感
引言
长期以来,如何对普通高等院校网球课程的学生所掌握的网球技术进行真实的测评始终是个问题,以往使用的评价方式更偏重于击打的精度而忽视了击打的力度,因此难以显示被测试者的真实水平。国际网球联合会推出了非职业网球选手水平评定的测试方法[1](简称ITN),较好地利用网球技术水平三要素:稳定、球速、准确来综合评价高校网球教学班的学生所掌握的网球技术水平[2]。为了在普通高等院校推行ITN,需要研制一种基于ITN的网球陪练机器人来作为辅助网球训练教学的“机器教练”[3-8]。采用基于ITN的网球陪练机器人辅助网球的训练教学,能有效地增加学生课内训练的时间;能使初学者的球感获得较快提升;能让学生按教师的要求,反复练习设定的网球基本技术和动作,使学生的网球基本技术得以迅速提高。通过一个学期的应用测试,验证了网球陪练机器人在网球训练教学中的效果,是一种值得大力推广的“机器教练”。
1 基于ITN的网球陪练机器人的机构设计
1.1 基于ITN的网球陪练机器人的总体设计
网球陪练机器人应具有“机器教练”的功能:一是按训练要求抛出一定力度、角度、速度、频率的球让练习者击打;二是对练习者击打球的准确性、击球速度和击球个数有考核记录。为实现“机器教练”的功能,网球陪练机器人的总体设计如图1所示。网球陪练机器人[9]由牵拉带组件、框架、球网、网球测速器、铰链组件、拦球网、收集网球兜、支架、抛球机组成。其中,在框架和支架的下部安装牵拉带组件,在其上部装有铰链组件,打开框架和支架时,它们构成稳定的三角架;网球测速器用螺栓固定在框架中部,当网球被击打而穿过雷达测速区时,球速被网球测速器记录下来;在支架上安装拦球网,在框架和支架的下部安装收集网球兜,当网球被击打在拦球网上时,网球随即从拦球网表面滚进收集网球兜,然后进入抛球机的网球收集机构;在框架下部中央安放一台抛球机,它以一定速度和频率将网球收集机构内的网球抛至练习者的击球位置,还可以按照练习者的要求抛出不同弧度和不同距离的球,供练习者练习设定的击球技术和动作。练习者将球击打进框内,才为有效,否则,球打飞了,练习球越来越少,也就不能连续练习下去。当本次练习完成,可查看控制器上记录的击球个数和击球速度。
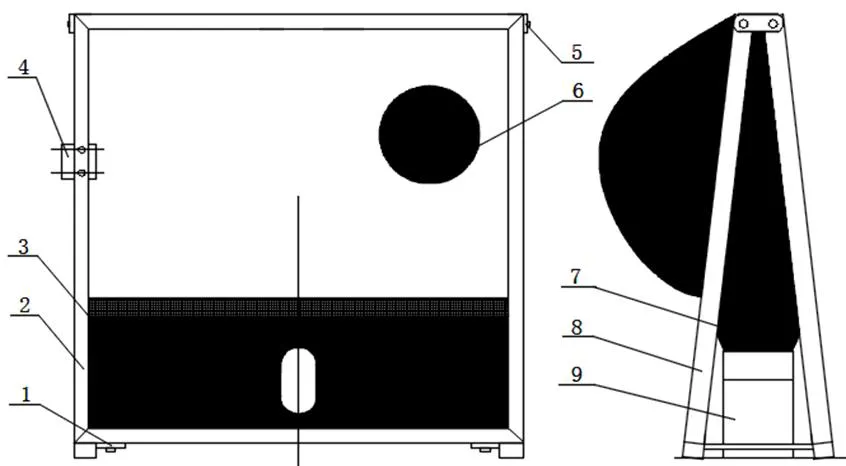
1—牵拉带组件;2—框架;3—球网;4—网球测速器;5—铰链组件;6—拦球网;7—收集网球兜;8—支架;9—抛球机。
1.2 网球抛球机的机构设计
网球抛球机[10]是网球陪练机器人的关键部分,它主导了网球的抛出和回收。如图2所示,网球抛球机由滚轮、机座、拉杆、机壳、调控盒、机架、进球管、螺栓、网球收集机构、落球拨叉、出球角调节器、摩擦轮、弯管轮、可弯曲射球管、摆动机架、摩擦管、步进电机和驱动丝杆、定位柱组成。
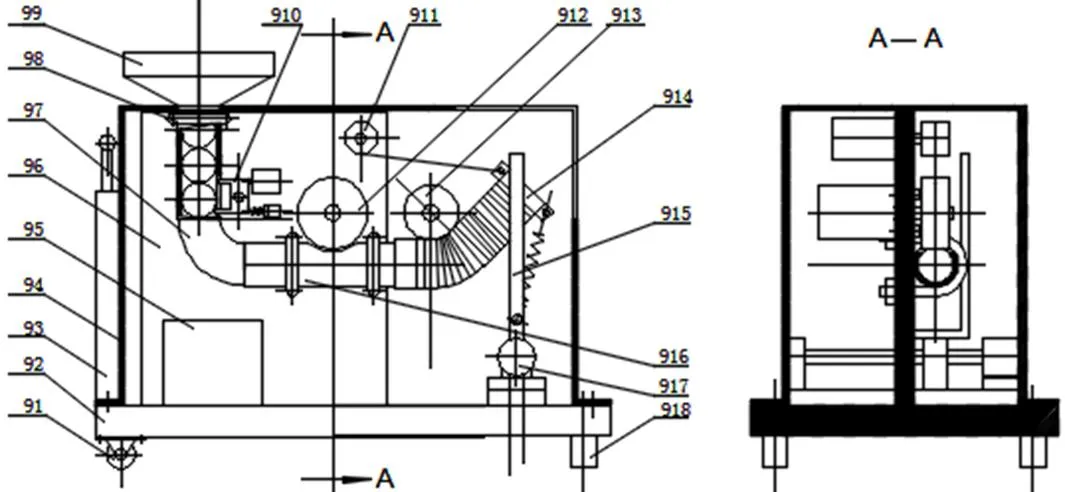
91—滚轮;92—机座;93—拉杆;94—机壳;95—调控盒;96—机架;97—进球管;98—螺栓;99—网球收集机构;910—落球拨叉;911—出球角调节器;912—摩擦轮;913—弯管轮;914—可弯曲射球管;915—摆动机架;916—摩擦管;917—步进电机和驱动丝杆;918—定位柱。
在机座下方安装有滚轮和定位柱;机壳安装在机座上方,机壳的右上角是网球的抛出口;机架与机座连接,抛球机的构件安装在机架上。网球收集机构由集球盘和螺旋滚道组成,它可有效避免多个网球挤兑而进不了出球中心孔;送球机构由进球管、落球拨叉、电磁铁组成,在电磁铁的作用下,落球拨叉按设定频率将网球送入摩擦管;发射机构由摩擦管、摩擦轮、直流电机组成,直流电机和摩擦轮直接连接,直流电机带动摩擦轮高速旋转,摩擦轮将动能传递到摩擦管内的网球上,网球获得动能而被射出;出球角调整机构由可弯曲射球管、出球角调节器、步进电机组成,出球角调节器采用步进电机驱动,出球角调节器通过钢丝绳的拉紧,或放松,可将可弯曲射球管的弯曲角变小或增大,不同的出球角,可以送出不同弧度、不同距离、不同落点的球。在机座上安装摆动机构,摆动机构由摆动机架、步进电机和驱动丝杆组成,在步进电机和驱动丝杆的驱动下,摆动机架带动可弯曲射球管作横向摆动,调节可弯曲射球管的摆动角。网球抛球机的功能模块如图3所示。
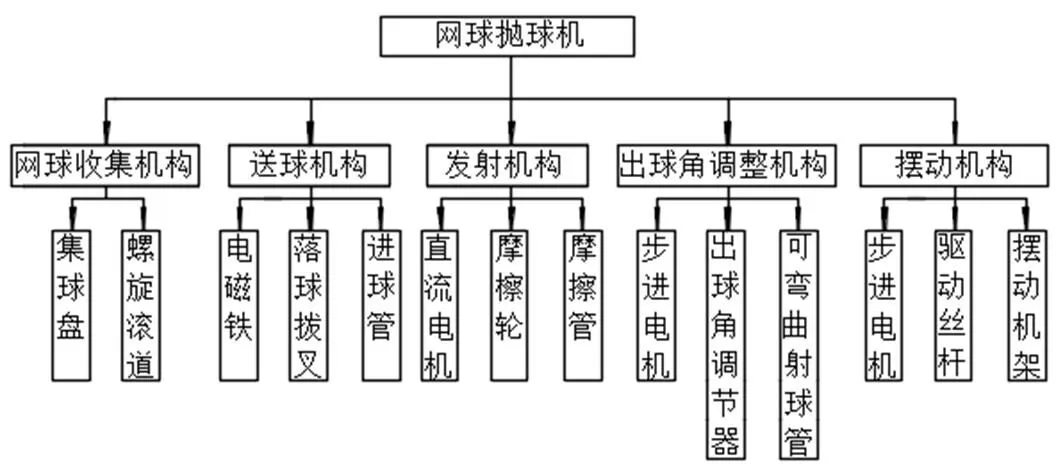
图3 网球抛球机的功能模块
1.3 基于ITN的网球陪练机器人的控制系统设计
1.3.1 硬件设计
以嵌入式微处理器STM32F103ZET6作为硬件系统的控制核心,其功能是将按键信号通过解码,转化为相应的控制电平,最后由相应单元电路驱动执行元件完成要求的操作。其硬件系统如图4所示。
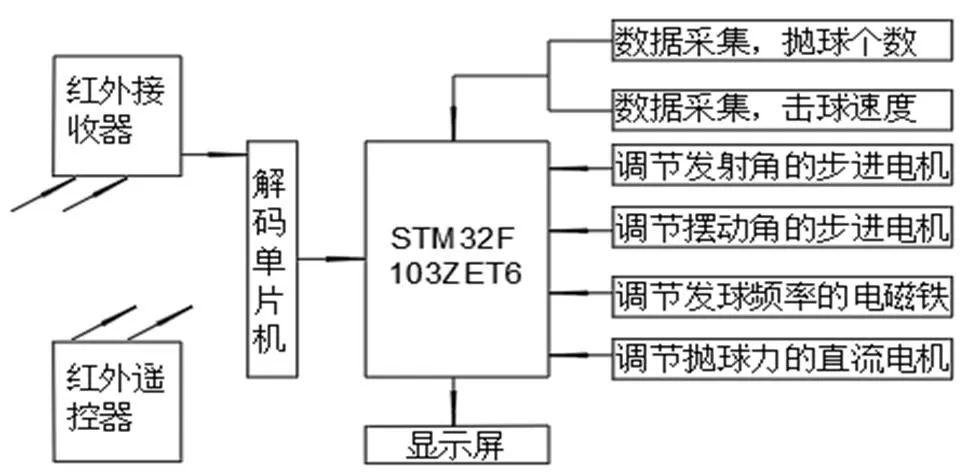
图4 系统控制框图
1.3.1.1 嵌入式微处理器STM32F103ZET6
嵌入式微处理器STM32F103ZET6以Cortex-M3为内核,拥有更卓越的性能、更高的代码密度、更宽的应用面、更具实时特性、低功耗、低成本等众多优点。
STM32F103ZET6的工作频率为72 MHz;内置高达512 K的 FLASH存储器和64 K的RAM内存,其中,FLASH存储器支持在线编程;具有丰富的通用I/O端口。
1.3.1.2 红外发射和接收系统
采用遥控器芯片TC9148P构建一对红外发射和接收系统,分别安装在网球抛球机红外接收器和红外遥控器上。当按下遥控器某键时,其信号发生器发出8路不同时序的扫描脉冲,依次扫描键盘,将获得的按键值调制成串行编码脉冲,该脉冲再经过驱动电路由红外二级管发射出去。当红外接收器接收到光信号后,经过光电放大电路、专门解码芯片将其复原成串行编码脉冲,然后由嵌入式微处理器按照编码或解码的协议转化为相应的控制电平,最后由相应单元电路驱动执行元件完成要求的操作。
1.3.1.3 驱动模块
控制直流电机的转速来调节网球抛球机的抛球力大小,控制步进电机的左右旋转步距角来调整网球抛球机的发射角和摆动角,这就要求驱动电路必须具有调速精准、驱动平顺、价格便宜等优势。L298N 功率集成芯片满足驱动电路的要求,选用L298N功率集成芯片来驱动继电器、线圈、直流电机、步进电机、电磁铁等元件,其驱动电压可达46 V,直流电流总和可达4 A,内部有2个PWM功率放大器。
1.3.1.4 数据采集器
系统需要采集的数据有抛球机抛球个数、运动员击球个数以及球速。
网球抛球机抛球个数通过统计出球控制器的电磁铁开关次数实现。电磁铁开关连接至STM32F103ZET6的PA0引脚,配置该引脚为外部中断输入,抛球机每抛出一个球,电磁铁开关形成一个有效的触发信号触发抛球计数器计数。
系统采用CSP100球类测速系统测量击球速度。测速原理是根据接收到的反射波频移量的计算而得出被测物体的运动速度,STM32F103ZET6通过串口读取速度值并显示至TFT-LCD。根据运动规律,球速大于某个值时记为有效击球。
1.3.1.5 显示屏
系统配置7寸TFT-LCD,该显示屏控制器ILI9341自带显存,容量为172 800 Byte,颜色数据存储格式为RGB565,分辨率为1 024*600。在显示系统设计中,TFT-LCD被设计成SRAM模式与STM32F1032ET6的FSMC接口通信,实时显示抛球机抛球个数、运动员击球个数以及球速等数据信息。
1.3.2 软件设计
软件主程序主要包括实现初始化、识别接收红外信号、执行按键操作和启用子程序等功能。初始化程序为系统通电后做好准备,当接收到红外遥控器发送的信号后,判别获得的按键值,然后将按键值传给嵌入式微处理器。嵌入式微处理器根据所得按键值执行对应的功能操作,同时在显示屏上显示正执行的功能操作状态,其程序控制模块如图5所示。

图5 总控模块
直流电机的调速方式都采用脉宽调制(PWM)。嵌入式微处理器的高级定时器和通用定时器均可以产生和输出PWM信号,其中高级定时器TIM1和TIM8可以同时产生多达7路的PWM输出。本系统采用高级定时器TIM1产生的PWM信号实现直流电机调速。程序配置步骤为:(1)开启TIM1时钟,配置PA9为复用输出;(2)设置TIM1_CH2重映射到PA9;(3)设置TIM1的ARR和PSC;(4)设置TIM1_CH2的PMW模式;(5)使能TIM1的CH2输出,使能TIM1;(6)修改TIM1_CCR2实现调整占空比,达到调速的目的。
控制步进电机转动的脉冲控制信号采用定时中断的方式产生,改变定时时间,即可改变脉冲频率,从而改变步进电机的转速。摆动机构在某角度内摆动时,根据摆动角度和步距角计算出步进电机转动所需的脉冲数Ⅳ(取偶数),然后反复动作:正转Ⅳ个步距角和反转Ⅳ个步距角,以此实现摆动功能。出球角调整机构实现发射角调整的原理同上。出球角调整机构和摆动机构都采用两相步进电机,用半步励磁法实现0.9度的步距角,其脉冲分配由软件方法实现。程序流程如图6所示。需调速时,通过查表改变进入中断的定时时间即可。
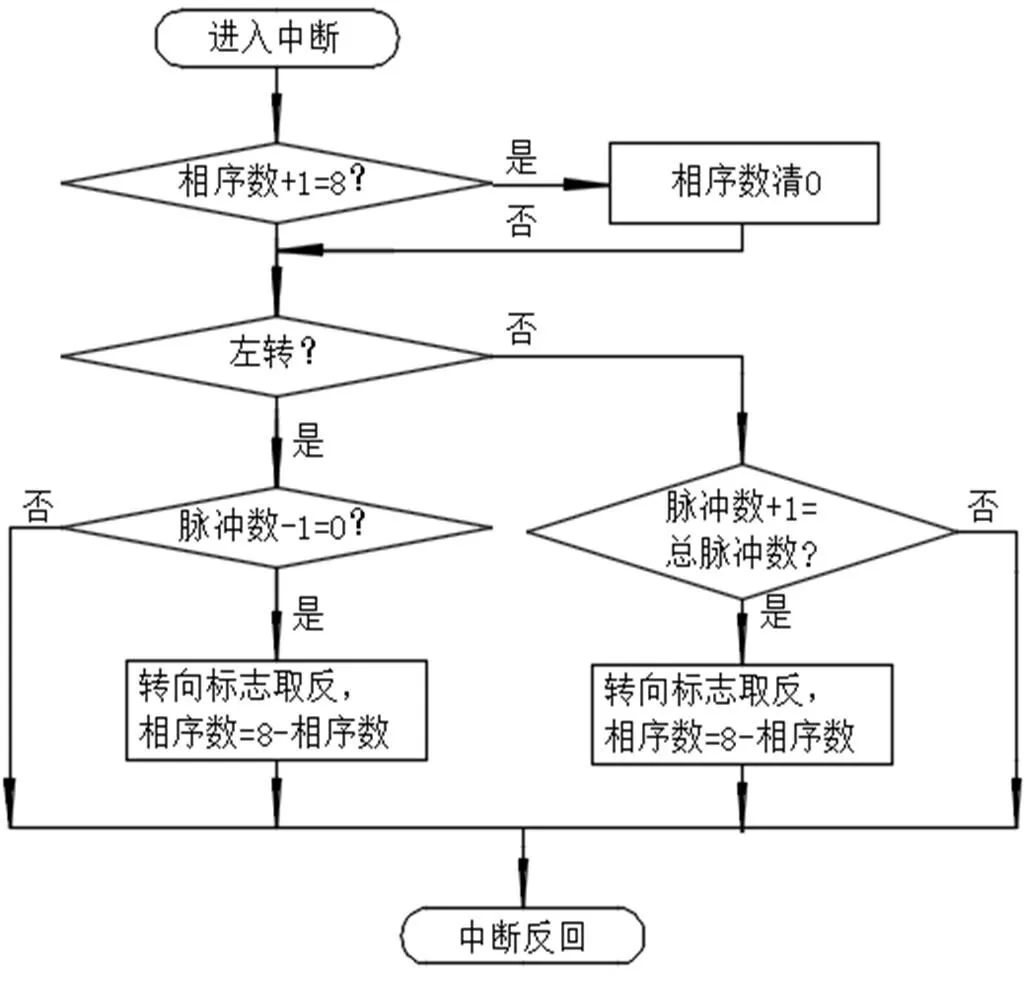
图6 步进电机程序流程图
2 基于ITN的网球陪练机器人的应用测试
2.1 用于测试样机的主要功能及参数
主要功能:(1)通过遥控器遥控抛球速度、出球频率、出球模式;(2)击球数量及击球速度统计分析功能。
主要参数:(1)抛出网球速度:20~140 km/h;(2)出球间隔时间:2~10 s;(3)发射角调节范围:300°~750°;(4)摆动角调节范围:-150°~+150°;(5)击打进框的网球测速:20~320 km/h。
2.2 测试对象
选取广西医科大学大二网球选修女生班的学生为测试对象,该班级学生都是初学者,随机将该班分成测试组和对照组,每组20人。
2.3 测试目的、内容及方法
测试目的是验证网球陪练机器人所具有的功能是否有助于网球训练教学,采用网球陪练机器人来辅助网球教学,与传统的网球教学方法作比较,在分析测试结果的基础上,总结采用网球陪练机器人辅助网球训练教学对提高高校网球课教学质量和效率起到的作用。
测试内容是按教学大纲要求安排网球运动中应用最多的一项技术,即正、反手击球练习[11]。
测试方法如下:对照组采用常规教学方法,采取一人“喂球”,学生一球一击,轮流在球场上完成正、反手击球练习;测试组采用网球陪练机器人辅助练习,正、反手击球训练的方法如图7所示:要求学生站在离网球陪练机器人5 m的地方,击球时,做好完整的正、反手击球动作,并控制好力度。当网球被抛出落地后,将网球击打到框架内,接着网球抛球机会按一定频率抛出网球,练习者通过不断地击打,一轮练习,直到三个球都打飞且无球进框架内,造成无球抛出为止;当击球的精度和力度都提高后,站位逐步向后移,移到8 m后,仍能连续多回合的将球击打到框架内。其目的是训练学生掌握正、反手击球动作的力度和精度,以及击球动作的完整性;培养盯球、跑位、击球的有机协同球感[12]。每次课需完成100个正反手击球的训练球数,数量可以累计,要求每轮连续三次以上的击球进入网球陪练机器人的框架内,才能计入训练球数。
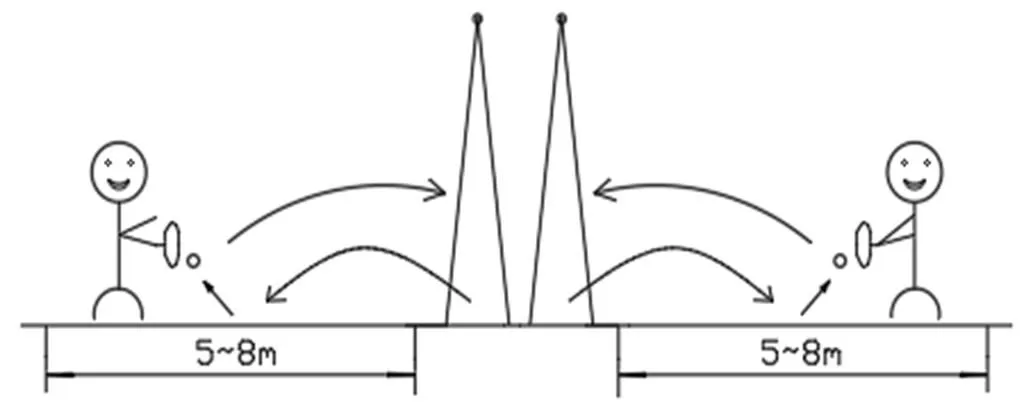
图7 连续多回合正、反手击球练习
2.4 考核与评价方式
18周的课程结束后,对测试组和对照组的学生按ITN要求进行考核。
对测试组和对照组的测试结果进行评分。正反手定位击球评分标准是:正反手定位击球落到指定区域的球[1],一个计两分,每个学生正反手定位击球各10个,满分为40分;正反手击球动作评分标准是:能按动作要领完成挥拍动作的,记9分;挥拍动作连贯、有力的,记12分;挥拍动作协调流畅、动作规范,击球质量高的,记15分;综合成绩为正反手定位击球的考核成绩,满分为55分。
3 结果与分析
对测试组和对照组进行考核测试,测试结果是:正手定位击球落到指定区域的个数,测试组最高10个,2人,最低6个,2人,平均成功率为82%;对照组最高9个,2人,最低5个,3人,平均成功率为68%。反手定位击球落到指定区域的个数,测试组最高10个,2人,最低6个,2人,平均成功率为79%;对照组最高9个,1人,最低5个,3人,平均成功率为66%。测试组和对照组测试结果及考核成绩均呈正态分布,运用体育统计学[13]作统计分析,并作检验,结果见表1。

表1 测试组和对照组正反手击球考核成绩对比表
注查检验临界值可知:当=3时,=,因为||>0.05,所以<0.05。
以稳定性、准确性、动作完整性等三个维度对正反手击球技术进行综合分析评价[14]。从表1中可以清楚地发现:相较正手击球的平均成功率,测试组比对照组高出14.0%;反手击球平均成功率对比中,测试组比对照组高出13.0%;因为||>38 0.05,所以<0.05,两者有显著性差异。从这些数据可以看出,测试组的学生正手、反手击球成功率均显著高于对照组的学生,说明网球陪练机器人有助于提高学生正、反手击球的力度和精度,以及击球动作的完整性。表1还显示:测试组的学生正、反手击球考核平均成绩高于对照组6.9,因为||>0.05,所以<0.05,显示两者有显著性差异。数据表明测试组的学生动作的完整性要显著好于对照组的学生,说明网球陪练机器人有助于提高学生的正反手击球质量和固定学生的正、反手击球动作。
从应用测试可以看到:网球陪练机器人抛球的力度、高度、落点的重复率高,有助于学生基础动作的练习,所以测试组不仅正、反手定位击球平均成功率高于对照组,而且对网球训练不积极的学生的最低击球落到指定区域的个数也高于对照组;网球陪练机器人可按击球动作需要,抛出不同速度、不同弧度、不同距离、不同频率的球,学生上手快,练习机会多,从量变到质变,正是一次次的击球练习,使初学者掌握了击球的力量和时机,有利于提高击球质量,对督促学生学习和练习有积极的作用;网球陪练机器人能对击中框内的网球个数和球速进行统计分析,这促使学生为了保持一定球速度下而不打飞球,在击球练习中就会增强注视击球落点的意识,提高了击球的准确性和力度;网球陪练机器人能回收击中框内网球,重复使用,学生不因捡球而耽误练习,有效地增加了训练强度,增强了信心和兴趣,不积极的学生也能获得一些收获;网球陪练机器人能与学生一对一、或一对二配对进行训练,解决了高校网球教练和场地不足的问题,提高了教师的教学效率[15]。
4 结论
以嵌入式微处理器STM32F103ZET6作为基于ITN的网球陪练机器人的控制核心,从而有效地实现了该机器人遥控抛球速度、出球频率、出球模式,以及击球数量及击球速度统计分析的功能。经过一个学期的测试验证,该机器人有助于学生基础动作的练习;有利于击球技术的巩固和提高;有效地增加了训练强度;解决了教练和场地不足的问题,增强了训练效果。该机器人应用于网球训练教学,具有成本低、功能强、效果好等特点,是一种值得大力推广的“机器教练”。
[1] 孙卫星,陈勇等. ITN网球技术水平测试的实用研究[J].山东体育大学学报,2013,29(2): 87-90.
[2] 黄波. 高校网球课程考核、评价方法的测试性研究[J]. 北京体育大学学报,2007,30(11): 1552-1554.
[3] 刘玲,靳伍银,等. 基于STM32自动网球拾取机器人设计[J]. 南京信息工程大学学报(自然科学版),2020,12(5): 609-613.
[4] 郭天宇,艾文浩,孙长富,等. 基于凸轮机械手的自动网球拾取机器人设计[J]. 无线互联科技,2019(12): 52-54.
[5] 肖华,黄河,谢模焱. 全方位移动式网球机器人的研究与设计[J]. 机电工程,2015,32(4): 509-515.
[6] 孙宏达,张洪霞. 网球服务机器人系统设计[J]. 黑龙江八一农垦大学学报,2019,31(5): 108-111.
[7] 谢小英,曹伟. 一种羽毛球陪练机器人的结构设计[J]. 机械设计与制造工程,2019,48(11): 43-47.
[8] 钮鸣宇,黎子琼. 网球训练模拟器在高校网球教学中的使用方法及效果[J]. 大众科技,2019,21(1): 72-74.
[9] 甘小梅,覃薛宇,钮鸣宇,等. 一种网球陪练机器人: 中国,202020694563.6[P]. 2021-3-30.
[10] 钮鸣宇,甘小梅,梁飘,等. 一种网球抛球机: 中国,202020549189.0[P]. 2021-1-26.
[11] 李国军,杨海平. 动作技能连续体理论在网球正反手击球技术教学中的应用研究[J]. 广州体育学院学报,2014,34(5): 64-66.
[12] 梁潇,王恒. 不同多球训练方案在网球教学中的应用研究[J]. 广州体育学院学报,2015,35(4): 116-120.
[13] 雷福民. 体育统计方法与实例[M]. 北京: 北京高等教育出版社,2017.
[14] 王海明. 女子网球竞技水平诊断指标体系的构建[J]. 武汉体育学院学报学报,2008,42(11): 54-57.
[15] 于南得. “网球墙”的建设与网球教学效果的评价[D]. 西安: 西安体育学院,2012.
Development and Testing of Tennis Sparring Robot Based on ITN
In order to implement the test method of non-professional tennis player's level evaluation introduced by International Tennis Federation in universities(referred to as ITN), a tennis sparring robot based on ITN is developed, and its working principle and structural characteristics are described. In order to verify its function and effect, the application test is carried out. The test results show that the robot is helpful for beginners to practice basic movements; it is beneficial to consolidate and improve the batting technique; it effectively increase the training intensity; the problem of lack of coaches and venues was solved, and the training effect was improved. The robot is used in tennis training teaching, and has the characteristics of low cost, strong function and good effect. It is a kind of "machine coach" worthy of promotion.
tennis; sparring robot; bat; feel of the ball
TP242
A
1008-1151(2023)09-0037-05
2022-11-24
2020年度广西高校中青年教师科研基础能力提升项目(2020KY71003)。
钮鸣宇(1983-),女,广西医科大学体育部讲师,研究方向为网球教学与训练、体育器械。
钮德明,男,广西理工职业技术学院教授,研究方向为自动化设备研制。