Recognition model and algorithm of projectiles by combining particle swarm optimization support vector and spatial-temporal constrain
2023-10-09HanshanLi
Han-shan Li
School of Electronic and Information Engineering,Xi'an Technological University,Xi'an,710021,China
Keywords:Six sky-screens intersection test system Pattern recognition Particle swarm optimization Support vector machine Projectile
ABSTRACT In order to improve the recognition rate and accuracy rate of projectiles in six sky-screens intersection test system,this work proposes a new recognition method of projectiles by combining particle swarm optimization support vector and spatial-temporal constrain of six sky-screens detection sensor.Based on the measurement principle of the six sky-screens intersection test system and the characteristics of the output signal of the sky-screen,we analyze the existing problems regarding the recognition of projectiles.In order to optimize the projectile recognition effect,we use the support vector machine and basic particle swarm algorithm to form a new recognition algorithm.We set up the particle swarm algorithm optimization support vector projectile information recognition model that conforms to the six sky-screens intersection test system.We also construct a spatial-temporal constrain matching model based on the spatial geometric relationship of six sky-screen intersection,and form a new projectile signal recognition algorithm with six sky-screens spatial-temporal information constraints under the signal classification mechanism of particle swarm optimization algorithm support vector machine.Based on experiments,we obtain the optimal penalty and kernel function radius parameters in the PSO-SVM algorithm;we adjust the parameters of the support vector machine model,train the test signal data of every sky-screen,and gain the projectile signal classification results.Afterwards,according to the signal classification results,we calculate the coordinate parameters of the real projectile by using the spatial-temporal constrain of six sky-screens detection sensor,which verifies the feasibility of the proposed algorithm.
1.Introduction
The dynamic parameter test of flying projectiles is one of the most crucial tests in the field of exterior ballistic testing performed in weapon shooting ranges.This test is also an important evaluation criterion for assessing the performance of guns and cannons.For the detection of projectiles of guns and cannons,the main detection equipment includes sky-screen [1,2] and light screen [3,4],which are non-contact photoelectric detection devices.The sky-screen mainly uses the background sky as the light source for performing detection.Its detection field of view is determined by the optical lens of the receiving optical path.The simultaneous splicing of multiple optical lenses ensures a relatively large detection field of view.At the same time,a low noise and highly sensitive photoelectric detector and a self-adaptive gain amplification circuit are adopted in the photoelectric detection conversion module.This ensures that the detection sensitivity of the sky-screen is relatively high and it is able to adapt the illumination of various detection and testing environments.Therefore,it is important measurement equipment for the dynamic parameters of projectile fired by guns and cannons in the external ballistic at present.Currently,there are mainly four sky-screens systems for testing the flight parameters of projectiles,including intersection test system [5],six sky-screens intersection test system [6],seven sky-screens intersection test system[7],and nine sky-screens intersection test system[8].
Although the sky-screens with natural light as the background light source is an ideal sensor for external ballistic measurement of projectile flight parameters,the changes in the natural light in working environments are random,such as blue sky,cloudy,strong light,low illumination background,etc.These environmental illumination changes considerably affect the detection performance of a sky-screen.In addition,flying mosquitoes and sudden changes caused by the thermal noise of the detection sensor itself,these are also sources of interference signals,we attribute these signals to external interference signals,and they are uncertain signals.Consequently,the recognition ability of multi-sky-screen intersection test system is reduced.About the interference caused by the mosquitoes,the formation of mosquito interference signals is also different at different high and low positions of sky-screen the formation of mosquito interference signals is also different.Please note that this random interference signal often appears at the same time as the projectile signal,some mosquito interference signals are close to the real projectile signal.As a result,it is difficult to identify the real projectile signal among the interference signals.Especially,when multiple sky-screens have interference signals at the same time in test system,it is very difficult to accurately identify the real projectile information.This situation often leads to large errors in the measurements and the test system may output multiple incorrect test data samples,so,the recognition rate and accuracy rate of projectiles in six sky-screen intersection test system is very low,this is the objective problem existing in the current weapon test,which restricts the ability of the test in weapon shooting ranges.
There are various works presented in previous literature aimed at the recognition of projectile signals.Wu et al.[9] proposed the use of correlation between the output signals of two parallel skyscreens for recognizing the projectile signals.Zhang et al.[10]proposed wavelet feature point detection projectile signal method by using the relationship between the wavelet modulus maximum,Li's index,and singularity to establish a modulus maxima feature point detection model.Lou et al.[11]proposed a sky-screen signal recognition method using Hopfield auto-associative neural network.Li et al.[12] established a projectile radiation model for the detection area of sky-screen based on the radiation characteristics of the projectile.In this model,the output signal of the skyscreen in detection circuit attributes to two kinds of discrimination models.It uses the wavelet Fisher discriminant method to construct the eigenvectors of the signal and gives the projectile signal recognition method of wavelet analysis.Chu et al.[13]considered the sky-screen as the unit detection sensor and established a projectile recognition and matching method with multisensor.In the aforementioned works,the recognition of projectile signals is mainly performed based on the relatively regular and intuitive interpretation of projectile signals.Although there are some works presented in literature that consider the interference methods,such as mosquitoes and shock waves,in the recognition of projectile signals,the recognition rate is not very high,especially for the projectiles fired by multi-barreled weapons.For a test device that uses a sky-screen to form a multi-sky-screen intersection test system,the distance between the two sky-screens is short,so the time in which the projectile passes through the two sky-screens is also very short.If it is accompanied by environmental interference signals,the recognition rate is greatly reduced in multi-sky-screen intersection test system.
In the test of projectile parameters,it is inseparable from the detection sensor of sky-screen,because of the particularity of the application environment of the sky screen test system,at present,it is difficult to realize the intelligent detection and intelligent recognition projectile information.In addition,the detection sensitivity and the recognition method of projectile signal by skyscreen are also different when we use sky-screen to detect the different projectile,it is very necessary to study and design high performance sky-screen sensors to meet the needs of different test environments.In order to improve the sensitivity and recognition rate of the sky-screen,we have done a lot of research.In Ref.[14],we have set up a multi-area detection sensitivity calculation model,analyze the distribution law of the uneven detection sensitivity of the photoelectric detection target using the multi-element array photoelectric detector,and dissects the main factors affecting the detection sensitivity;In Ref.[15],we have proposed a line laser with high power as the background light source for the design of a new photoelectric detection target to solve the problem of detection ability of sky screen in low illumination environment,used the laser emitted pulse waveform function and the laser echo pulse response function to establish the mathematical model of the reflected echo power of projectile in the detection area,and derived the calculation function of minimum detectable echo power in the line laser detection screen;in Ref.[16],we have developed a dynamic seven photoelectric detection screen test method,which is made up of six plane detection screens and a flash photoelectric dynamic detection screen,established the three-dimensional coordinates calculation model of the projectile proximity explosion position based on seven plane detection screens with dynamic characteristics.
Based on the work we have studied,in this paper,we propose a new recognition method of projectiles by combining the particle swarm optimization support vector and spatial-temporal constrain on multi-screen detection sensor to improve the recognition rate and accuracy rate of projectiles in six sky-screens intersection test system.The major contributions of this work are presented below.
(1) We establish a parameter measurement model of flight projectile on the six sky-screens intersection test system.Moreover,we research the output signal characteristics of sky-screen and analyze the existing problems regarding the recognition of projectile signals and the difficulties in the recognition of real projectile signals.
(2) We use support vector machine classification principle and basic particle swarm algorithm to form a new recognition algorithm for projectiles.The proposed particle swarm algorithm optimization support vector projectile information recognition model conforms to the six sky-screens intersection test system.
(3) We construct a spatial-temporal constrain matching model based on the spatial geometric relationship of six sky-screens intersection,and form a new projectile signal recognition algorithm with six sky-screens spatial-temporal information constraints under the signal classification mechanism of particle swarm optimization support vector machine (PSOSVM).
(4) By performing experiments,we obtain the optimal penalty parameter and kernel function radius parameter in the PSOSVM algorithm by adjusting the parameters of the support vector model,training the test signal data of every skyscreen,finally gain the projectile signal classification result.At the same time,based on the classification results,we use the spatial-temporal constrain matching method to calculate the real projectile parameters.
The remainder of this paper is organized as follows.Section 2 states the measurement principle and output signal characteristics of six sky-screens intersection test system.Section 3 states the signal recognition of projectile based on support vector machine.Section 4 states the particle swarm optimization support vector machine parameters method.Section 5 states the spatialtemporal constrain method of six sky-screens detection sensor.Section 6 states the experiment results and analysis.Finally,Section 7 concludes this paper.
2.The measurement principle and output signal characteristics of six sky-screens intersection test system
2.1.The measurement principle of projectile flight parameters
The measurement principle of projectile flight parameters for six sky-screens intersection test system is shown in Fig.1,whereM1-M6denote the detection screens of sky screens,the intersection angle between the detection screensM1andM2and the intersection angle between the detection screensM3andM6are both α,the intersection angle between the detection screensM1andM4and the intersection angle between the detection screensM5andM6are both β.The detection screensM1andM6are a set of parallel detection screens with distances,and the detection screenM1is in the coordinate planexoy,oo′=s/2.The intersection point of detection screenM2andz-axis isA,and its coordinates are(0,0,s);the intersection point of detection screenM2andz-axis isB,and its coordinates are (0,0,).When the projectile passes through six detection screens,each detection screen outputs an instantaneous signal.Based on signal recognition,we obtain the moment value of the projectile at each sky-screen,wheretiis recorded as the signal starting moment of each detection screen andiis the detection screen serial number,i=1,2,…,6,among,V1-V6are the signal output by the six sky-screens.
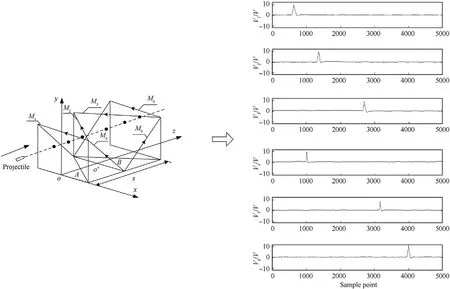
Fig.1.The measurement principle of six sky-screens intersection test system.
As the distance between the six detection screens is relatively short,the movement of projectile that passes through the six detection screens can be treated as a uniform linear motion.On the premise that each sky-screen can detect the projectile information,the six output signals contain the moment when the projectile passes through the six sky-screens.We can deduce the calculation function of the projectile flight parameters,and Eq.(1) is the calculation function of the projectile parameters.
where θ and γ are the pitch angle and azimuth angle of the flying projectile respectively.
2.2.Characteristics of output signal of sky-screen
According to the measurement principle of projectile flight parameters of six sky-screens intersection test system,when the geometric angles of the intersection of six detection screens are determined,as well as each sky-screen's optical lens,detection amplification circuit and responsiveness of photoelectric detector,the coordinate parameters of flying projectile mainly depend ontiin Eq.(1).In order to obtain the actual projectile coordinate parameters,it is necessary to accurately obtain the moment of the projectile passing through each detection screen.Considering the same projectile fired by weapons,each of six sky-screens has only one projectile signal under ideal detection conditions.At this moment,the same projectile’s time information can be determined for each sky-screen and there is only one solution of Eq.(1),i.e.,the coordinates of the flying projectile obtained under ideal conditions.However,it is noteworthy that the output signal from each skyscreen in the six sky-screens intersection test system is not unique and there is a presence of other interference signals.Fig.2 presents a projectile signal with interference signals collected by the test system.
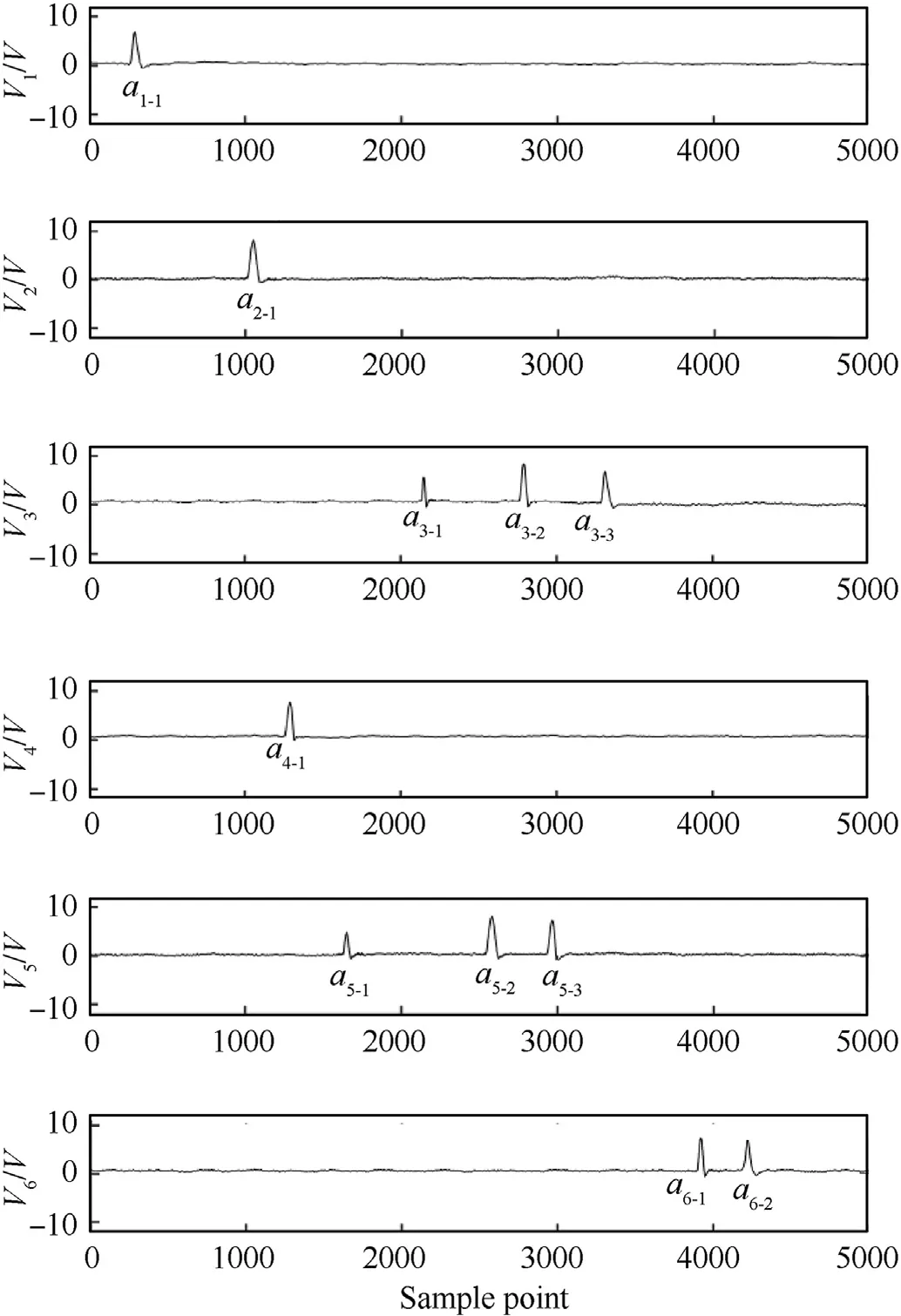
Fig.2.A projectile signal with interference signals collected by the test system.
It is not difficult to find that for the same projectile,there are obvious differences in the output signals of the six sky-screens in the presence of external interferences.Please note that some skyscreens output one target signal,and some screens output multiple target signals.For example,the outputs of detection screensM3andM5comprise three signals at different times.Contrary,there is only one output signal in detection screensM1,M2,andM4.There are two signals at different times for detection screenM6.It is evident that the output signals ofM3,M5andM6contain other interfering signals in addition to the real projectile signals.The main reason is that during the external ballistic test of the six skyscreens intersection test system,due to interferences in the test environment,when the sky-screen senses the projectile information,it also senses other target information.This leads to the corruption of output signal with interference signals.In Fig.2,a1-1,a2-1,anda4-1represent the output signals ofM1,M2,andM4,respectively;a3-1,a3-2,anda3-3are the output signals ofM3;a5-1,a5-2,anda5-3are the output signals ofM5;a6-1anda6-2are the output signals ofM6.We observe that the output signals ofM3,M5,andM6are quite different from the output signals ofM1,M2,andM4.Consideringa3-1anda5-1,their signal width is relatively small,while the signal peak is very also small.The signalsa3-1anda5-1do not belong to the same screen as compared toa1-1,a2-1,anda4-1.The signal characteristics ofa3-2,a3-3,a5-2a5-3a6-1,anda6-2are relatively close toa1-1.Now,it is relatively difficult to accurately decide ifa3-2a3-3,a5-2,a5-3,a6-1anda6-2belong to real projectile signals.This is a common problem in the existing multi-sky-screen intersection test systems.
Although some signal filtering methods have been used in the detection circuit of sky-screen to eliminate low-frequency and high-frequency interference signals,the outputs of sky-screen still have uncontrollable and inevitable external interference.In order to distinguish the projectile’s real signal from the interference signals,in this work,we use support vector machine classification principle and the basic particle swarm algorithm to form a new recognition algorithm for projectiles.We set up the PSO-SVM recognition model that conforms to the six sky-screens intersection test system.At the same time,we construct a spatial-temporal constrain matching model based on the spatial geometric relationship of six sky-screens intersection and form a new projectile signal recognition algorithm with six sky-screens spatial-temporal information constraints under the signal classification mechanism of PSO-SVM algorithm.
3.The signal recognition of projectile based on support vector machine
3.1.Feature of projectile’s signal
Considering the six sky-screens intersection test system and the photoelectric detection principle of sky-screen itself,it is assumed that the output signal of each sky-screen is filtered by wavelet.This enables us to eliminate the high-frequency and low-frequency components of the signal and retain useful information.However,the interference signals of sky-screen are caused by the changes in environmental illumination,mosquitoes in the environment,and the noise generated by the detection circuit itself.Please note that the frequency components of these signals show considerable variations.For the sky-screen,its detection screen is a fan-shaped and effective detection area with a certain thickness.When the parameters of optical lens are determined,the thickness of detection screen increases with an increase in detection height,which conforms to the linear law of thickness and detection height.For the projectiles of same size passing through the detection screens,the widths of output signals are different at different detection heights.Therefore,for a single sky-screen,although the velocity of projectile and the flight height are different,it is possible that the output signal has an approximation.
In order to recognize the projectile signals by the six sky-screens accurately and effectively,we extract the time-domain features with large separation,good robustness,and low computational complexity.For the projectiles with different height and low positions,peak value and pulse width of projectile signal change slightly[17-19].Therefore,the projectile signal is a random signal.For the same projectile at the same position,the peak value and pulse width of the projectile signal are standard values,which can be calculated directly.In order to recognize the real projectile signal by training a support vector machine,we use the peak value and pulse width of the projectile as the characteristic quantity of recognition and recordVas the peak value of the projectile andTas the pulse width of the projectile.
For the projectile signal of each sky-screen,the peak data of the output projectile signal of the sky-screen is calculated based on signal processing methods.The voltage value corresponding to the rising and falling edges of the target signal is 1.5 times the average noise voltage.They are determined as the starting and ending points of the projectile signal,so the two sampling timesn1andn2are obtained.The pulse width of the target signal is expressed asT=(n2-n1)/f0,wheref0denotes the signal acquisition frequency.For any one projectile,the output signal of any sky-screen in six sky-screens intersection test system forms a group of feature vectorsxk,andxk={Vk1,Tk1,Vk2,Tk2,…,Vki,Tki},wherekis the serial number of shooting projectile,k=1,2,…,n;andiis the sequence number of detection screen of sky-screens,i=1,2,…,6.
3.2.Design of feature classifier based on support vector machine
A support vector machine is a classification algorithm that is used to perform pattern classification and nonlinear regression.It maps the vectors in higher dimensional space and finds the nonlinear relationship between the input and output in a higher dimension,i.e.,if an appropriate kernelK(Xk′,X)is defined,and the input space is mapped to a higher dimension through non-linear transformation,then the optimal linear classification surface in a higher dimension is obtained[20-22].
The general form of linear discriminant function in m-dimension space is
The classification surface function iswTX+b=0.Please note that the discriminant function is normalized so that all the samples of two categories satisfy |G(X)|≥1,i.e.,the classification surface correctly classifies all samples.In addition,it is necessary thatwherek′=1,2,…,l.At this moment,the samples closest to the classification plane satisfy |G(X)|=1.
The optimal classification function is expressed as follows:f(X)
where sgn() denotes the number of symbols,lis the number of training samples,are the training samples,Xis the sample to be predicted,andb*is the offset determined based on the training sample.
when the hyper plane is unable to completely separate the two classes of data,a relaxation variable ξkis introduced,and ξk′≥0.Now,the hyper planewTX+b=0 satisfies the following expression.
where the constantCis the penalty factor and transforms SVM into a secondary programming problem[27,28],and is expressed as Eq.(8).
3.3.Kernel function and parameters of SVM
The corresponding discriminant function is expressed as follows:
where σ denotes the kernel radius parameter.
The parameter σ2of the kernel function is related to the complexity of the distribution of the sample data in a higher dimensional feature space.The larger the value of σ2,more obtuse is the kernel function to the sample data and fuzzier is the description of the outliers in the classification of SVM.Therefore,the SVM generalization ability is improved.However,the number of support vectors decrease,and the training error increases.On the other hand,smaller the value of σ2,the more sensitive is the kernel function to the sample data,more detailed is the description of outliers in the classification of SVM,and smaller is the training error.The penalty factorCmainly balances the ratio between the confidence range of the learning machine and the empirical risk in the feature space.The larger theC,the greater is the penalty for the misclassification of the samples,and greater is the biasness of the SVM hyperplane towards outliers.At the same time,the complexity of SVM increases [30],and its generalization ability decreases.Contrary,the smaller the value ofC,the smaller is the penalty of the empirical error,the smaller is the complexity of the SVM,and larger is the empirical risk.Therefore,the choice of appropriate parameters σ2andCis very important for a SVM classifier with better generalization ability.
4.Particle swarm optimization support vector machine parameters method
4.1.Particle swarm optimization algorithm
The particle swarm optimization(PSO)algorithm is an iterative optimization method [31] that has the ability to solve a variety of optimization problems.The main characteristics of particles are position,speed,and fitness value.The optimal solution is mainly searched based on the experience of the particle as well as the surrounding particles.During the search process,the position and speed of the particle are dynamically adjusted to find the global optimal solution.Let us assume that in am-dimensional search spaceS∊Rmand a population consisting ofn′particles,the position of thej-th particle is represented by am-dimensional vector,i.e.,Xj=(xj1,xj2,…,xjm).The position of each particle represents a candidate solution to the problem.The quality of these solutions is determined by the fitness function.The better the fitness function,the better is the solution associated with it.Please note that the fitness function is related to the objective function and is generally set according to specific problems.The speed of a particle is also am-dimensional vector,i.e.,Vj=(vj1,vj2,…,vjm).The best position encountered by thej-th particle during its flight is a point in spaceS,expressed asε represents the particle of the best position of the population obtained by the particle swarm in the previous flight process andpεrepresents the position of the best particle of the population.After iterative optimization and random search,the finalpεdenotes the solution of the optimization problem.The iterative update process of particle speed and position is mathematically expressed as
wherew′is the inertia weight coefficient,which determines the search range of the solution by setting its magnitude,d′=1,2,…,m,j=1,2,…,n′,m′is the number of current iterations,c1andc2represent the learning factors,andr1andr2are two mutually independent random functions between(0,1).The range of variation of position in thed′-dimension isand the range of variation of speed iswhich is set to the boundary value-xmaxorexceeds the boundary in the iteration[32].
Particle swarm optimization algorithm has the advantages of simple strategy searching and fast convergence speed,but the algorithm itself also has limitations.It can quickly approach the optimal value in the early stage of optimization,but the convergence speed is greatly reduced near the optimal value,which is prone to local convergence.From the speed update function of particle swarm,it can be seen that the inertia weightw′reflects the ability of particles to inherit the previous speed.A larger weight is conducive to global search,while a smaller weight is more conducive to local search.The inertia weight is adjusted adaptively according to the convergence degree of the group,and the fitness value of the weight changes accordingly,which can avoid falling into local optimization.The adaptive adjustment method is to adjust the size of the fitness value.Using different inertia weights for particles in different states can maintain the diversity of inertia weights,make particles with different inertia weights play different roles in different time periods of the algorithm,and balance the contradiction between global convergence and convergence speed.In this paper,the recognition of the output signal of the sky-screen is mainly based on the evaluation of the signal pulse width and the signal peak value,which integrates the training and learning of the real projectile under the certain shooting height,so as to find the best and match the real projectile signal.The particle swarm recognition algorithm is used to quickly obtain the information of the approximate projectile signals in the local search,therefore,it needs to be improved on the basis of Eq.(10).
In Eq.(13),w′minis the minimum value ofw′.
For particles whose fitness value is less thanw′,use Eq.(14) to adjust its inertia weight.
In Eq.(14),μ is an appropriate constant.
By using Eq.(14),the large value area within the value range ofw′is ensured,which avoid the phenomenon of local convergence.
4.2.Particle swarm optimization support vector machine parameters
The radial basis kernel function is selected to optimize the penalty parameterCand kernel function radius parameters σ of support vector machine.Then,we obtain a set of penalty parameters and kernel function parameters with the smallest error of SVM,so as to enable the optimized SVM to effectively predict and classify.In them-dimensioned space,n′particles continuously update their position and speed based on Eq.(12) and perform iterative optimization to obtain the optimal parametersCband σbof SVM.The PSO optimizes SVM,including population initialization,finding initial extreme value,iterative optimization,and other operations.The main steps of this process are expressed below.
(1) In them-dimensional parameter space,n′particles are initialized randomly to determine their positions and speeds,i.e.,the SVM parameters and select a certain input sample to establish the SVM model.
(2) The value of the function is determined based on the SVM classification decision function,and the particle fitness is evaluated.
(3) The global optimal parameters are estimated.If the termination conditions are not satisfied,the iterative search updates the speed and position of the particles,and process returns to step (2).
(4) If the termination conditions are satisfied,the optimal parameters are obtained,and the SVM is retrained as the final classifier for recognition and classification.
Considering the iterative process presented in step (1) -step(4),the optimal values of penalty parametersCand kernel function radius parameters σ minimize the error of SVM.Fig.3 presents the flowchart of PSO-SVM algorithm.
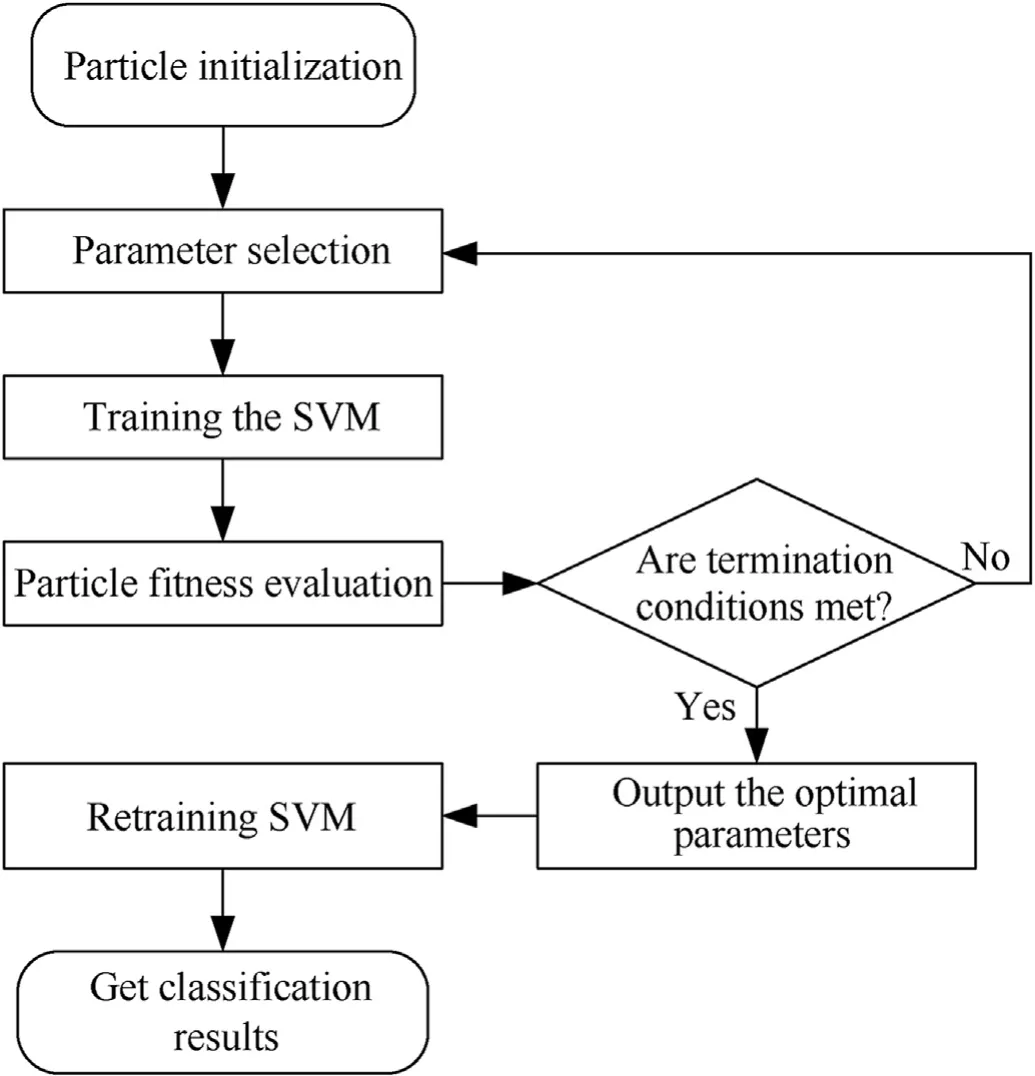
Fig.3.The flowchart of PSO-SVM algorithm.
where,t1-t6denotes the time of the real projectile.Please note that the slope of the connecting line between two coordinates(x1k,y1k,z1k)-(x6k,y6k,z6k) must be same and satisfies the constraint relationship presented below.
5.Spatial-temporal constrain method of multi-sky-screen detection sensor
The sky-screen uses natural light as the background light,it is easily affected by the changes in the background light intensity and non-projectile false target.The effective projectile signal has been recognized by PSO-SVM classification.However,when peak and pulse width of the false target signal is very similar to the projectile information,it is not possible to recognize the real projectile signal.Based on the classification and recognition of projectile signals by using PSO-SVM algorithm,the calculation model of projectile parameters with constraints is established by using the spatial relationship of six sky-screens intersection and the time of the projectile passing through every sky-screen.
Because the test area of the six sky-screen intersection is relatively short,the time for the projectile to pass through the test area is also short,and the flight path of the projectile can be regarded as a linear uniform motion.The timetqicorresponding to the projectile signal is classified and recognized based on PSO-SVM,q=1,2,…,g,i=1,2,…,6,wheregis the number of effective projectiles output by thei-th sky-screen.If v is the flight velocity of the projectile,and vx,vyand vzdenote the velocity components alongox,oyandoz,respectively.(x1,y1,z1)denotes the coordinates from where the projectile passes through the detection screenM1and[x1+vx(t2-t1),y1+vy(t2-t1),z1+vz(t2-t1)] denotes the coordinates from where the projectile passes through the detection screen planeM2.Similarly,[x1+vx(t6-t1),y1+vy(t6-t1),z1+vz(t6-t1)] represents the coordinates from where the projectile passes through the detection screen planeM6.The components of velocity vector on three coordinate axes are not zero when the trajectory has a certain angle with thex-axis.Then the coordinate of the projectile passing through other detection screens and the projectiles’ velocities are given by Eq.(15) and Eq.(16).
Based on Eq.(15)-Eq.(17),the unique timet1-t6of the same projectile can be determined for eliminating the false projectile signal time recognized by PSO-SVM classification.
6.Experiment results and analysis
6.1.Test data of projectile signal and analysis
In this work,the particle swarm algorithm is used to obtain an optimized SVM classification model.In this method,the “particle”is defined as the possible solution(C,σ2)in the solution space.Each particle searches for the optimal solution by adjusting its position and speed through the fitness determined by an optimized function.In the test and calculation verification,we mainly analyze the data by collecting the projectile whose diameter is 5.8 mm.Fig.4 shows two projectile signals collected by six sky-screens intersection test system.
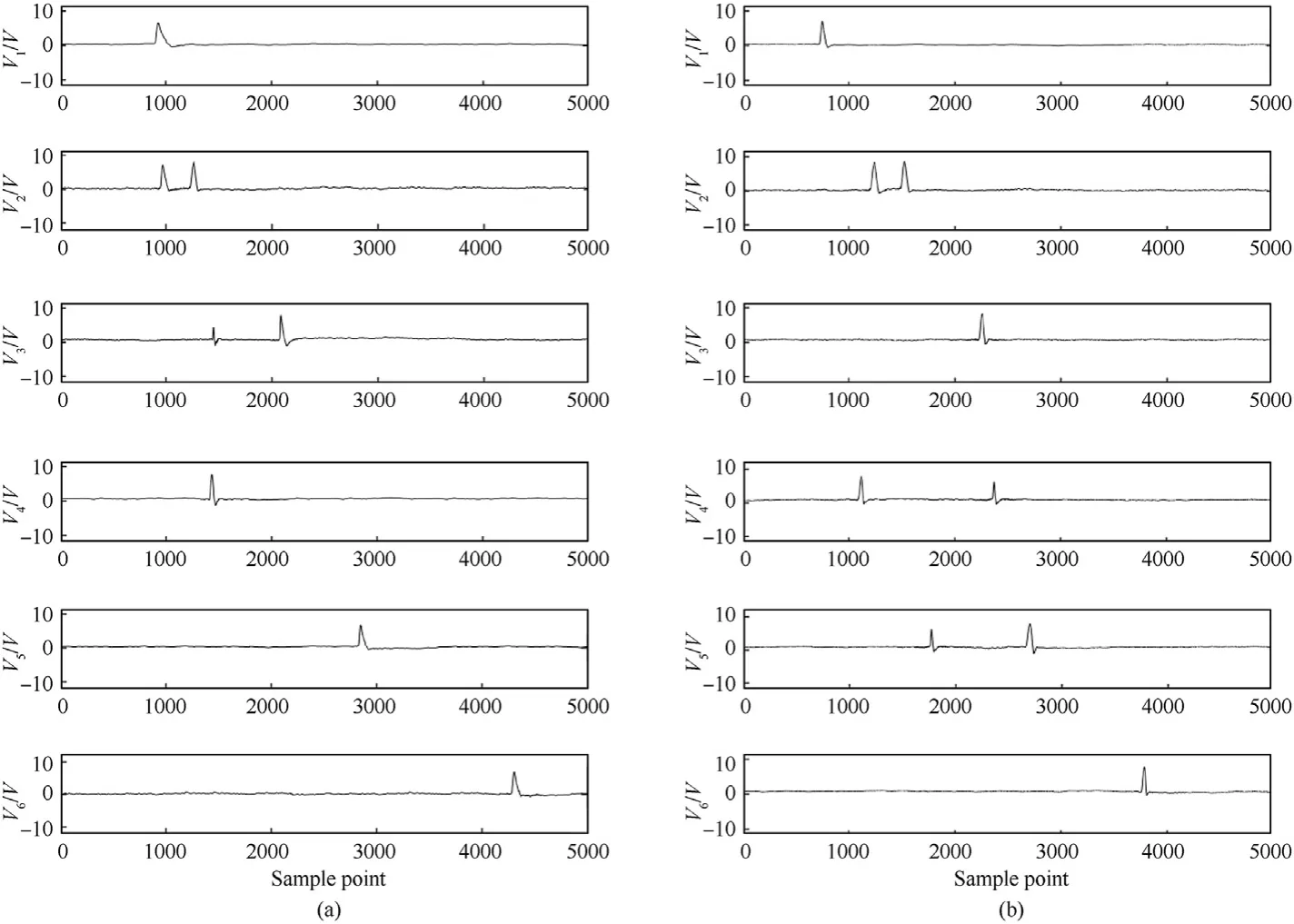
Fig.4.Two projectile signals collected by six-sky-screen intersection test system: (a) One projectile signals collected;(b) Another projectile signals collected.
The signals presented in Fig.4 show the exact moment the projectile passes through the sky-screen.Please note that in addition to the projectile's signal,there is an existence of some interference signals,which exist in high proximity to the projectile's signal.Consequently,some errors are introduced in the results of projectile parameters calculated by the test system.Considering the characteristics of the sky-screen's own detection,the duration of the projectile passing through its own detection screen is different at different positions of detection height.In addition,the image area of the projectile in the photoelectric detector is also different.This results in a difference in the peak signal output of the projectile at different positions of height.However,in the six sky-screens intersection test system,the optical and circuit parameters of six sky-screens are same.Therefore,the imaging area and duration time of the projectile passing through each detection screen are same at same height and for the same type of projectile.This lays the foundation for PSO-SVM algorithm.We use the data set formed by the same type of projectile firing at a known height for training the support vector machine model.Based on the training samples,we can recognize the same type of projectile at the same shooting height.Table 1 shows the peak average voltage and average pulse width data collected by firing projectiles with 5.8 mm at different heights.The data is collected for 100 projectiles at different shooting heights.

Table 1 The peak average voltage and average pulse width data collected at different heights.
Considering the peak voltageVand pulse widthTof the projectile,for each group of sample sequencesiat the same shooting height,we obtain 12 characteristic parameters of the output signals of six sky-screens and form a group of characteristic vectorsXi={Vi1,Ti1,Vi2,Ti2,…,Vi6,Ti6}.We set the inertia weightw′=0.75,c1andc2of particle swarm optimization to 1.6 and 1.8,respectively,the particle size to 30,and the maximum number of iterations is set to 100.After training iterations are completed,we obtain the optimal resultCband σbof penalty parameters and kernel radius parameters.Now,we obtain the feature sample data and divide it into training and test sets.The training set is used to train the SVM classifier and the test set is used for testing the SVM classifier to obtain the recognition results.If the recognition results are consistent with the test target information,it shows that the projectile fired at this height is correctly classified,otherwise it is wrongly classified.
6.2.Test results and analysis
According to the basic principle and kernel function of support vector machine,the core purpose of the PSO-SVM is to optimize the penalty parameterCand kernel function radius parameter σ of support vector machine,so as to obtain a set of penalty and kernel function parameters with the smallest error of SVM,which makes the optimized SVM better in terms of prediction and classification.Based on the characteristics of signal peak and pulse width output by sky-screen at specific shooting height,we combine the set particle size and maximum iteration times;the support vector machine parameter algorithm is optimized according to particle swarm optimization algorithm.The iterative process of particle swarm optimization algorithm gradually tends to the fitness of the best parameter with an increase in the number of iterations.After using particle swarm optimization algorithm to optimize the parameters of support vector machine,we use the unoptimized and optimized SVM classifier to recognize the projectile signals at different shooting heights.We select the projectiles with the heights of 1.5 m and 2.5 m as the test objects.The test and training samples are shown in Table 2.In order to ensure model generalization,we select 85% and 65% as the training set and the remaining samples as the test set,which are respectively sent to the nonoptimized SVM classifier and the SVM classifier optimized by the PSO parameters for recognition.The recognition rate is presented in Table 2.We iterate respectively aiming at the test data with shooting height of 1.5 m and 2.5 m.When the iteration termination condition of PSO-SVM is satisfied and the optimization process is completed,the recognition rates of projectiles at the height of 1.5 m and 2.5 m are 94.8% and 95.7%,respectively,and the corresponding output optimal parameters are (Cb1,σb1)and (Cb2,σb2),respectively.Under two shooting conditions,the value range of relative support vector machine parameterCis(0.1,10,000),and the range ofgis (0.1,150).As presented in Table 2,the projectile signal recognition rates for the three shooting states range from 87% to 92% when the PSO optimization method is not used.After using PSO-SVM parameter optimization,the recognition rate is about 94.8%.This reflects that the PSO-SVM parameter optimization has a better performance.On the other hand,it is also evident that the particle swarm algorithm is able to find the optimal combination of penalty and kernel function parameters more accurately and efficiently,resulting in a corresponding reduction in the recognition error of the support vector machine.
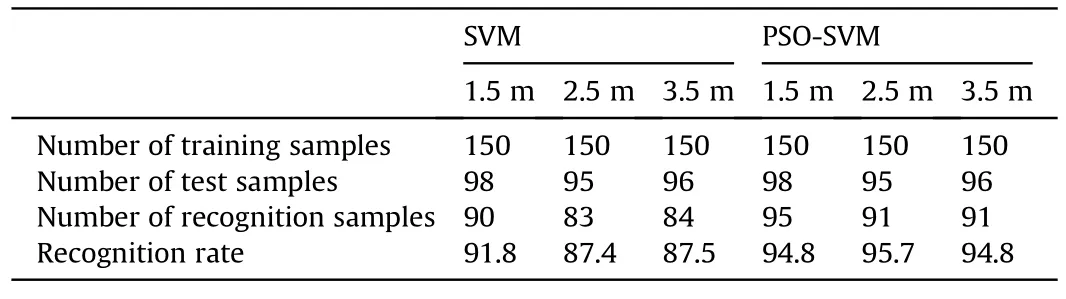
Table 2 A comparison of results obtained using SVM and PSO-SVM recognition methods.
6.3.Verification test of projectile information on spatial-temporal constrain method
The results presented in Table 2 show that although better penalty and kernel function radius parameters are obtained by adjusting the initial parameters,the projectile recognition rate of six sky-screens intersection test system has not reached its best.The main reason for this is the presence of interference signals in the sky-screen.The duration time between these interference signals and the real signal is random.If we directly use the trained PSO-SVM model to compute the flight parameters of the projectile,the corresponding results are erroneous and the parameters of the projectile are not unique.In order to address this problem,we introduce the spatial-temporal constrain method of six sky-screens to eliminate highly approximated interference signals retained after training the PSO-SVM.
In the design of six sky-screens intersection test system,the layout parameters ares=3mα=.23.8o,β=.20.5o.Fig.5 presents the original signals of a projectile when there are redundant false projectile signals,which are denoted asb1-1b1-2b2-1b3-1b3-2b3-3b4-1b5-1,b5-2b5-3b6-1,b6-2andb6-3.Table 3 presents the time value corresponding to the existence of highly similar projectile signals after performing classification using PSO-SVM.

Table 3 The time value corresponding to the existence of highly similar projectile signals.
Table 3 shows that there are still significantly similar projectile signals after the recognition processing by adopting PSO-SVM.There are three approximate target signals in detection screenM5and two approximate target signals in detection screenM6.Based on the constraints presented in Eq.(15) -Eq.(17),we substitute the time recorded in Table 3 into the constraint relation expression and regard the conditions of the constraint term as the calculation result.Based on the constraint matching calculations,the time that satisfies the unique solution of the constraint relations aret1=0.36 ms,t2=1.54 ms,t3=2.21 ms,t4=0.76 ms,t5=3.09 ms,andt6=3.63 ms.Then,according to Eq.(1),the flight parameters of the currently shooting projectile are.x=-0.76m,y=3.05m.
Through the experiments above,the recognition algorithm proposed in this paper can effectively eliminate the false signals of approximate projectiles.
7.Conclusions
Aiming at the six sky-screens intersection test system in the shooting test field,the test results and recognition rate are affected by the interference caused by the external environment.In this work,we propose a new recognition method of projectiles by combining particle swarm optimization support vector and spatialtemporal constrain of six sky-screens detection sensor.According to the principle of support vector machine and particle swarm optimization algorithm,the optimal penalty and kernel function radius parameters are obtained by adjusting PSO-SVM parameters and the test data of the six sky-screens are trained and learned.At the same time,the speeds and positions of particles are updated according to the search for the global optimal parameters and iterative search.According to the spatial-temporal constraint information of six sky-screens,the highly approximate interference signals are eliminated,and the coordinate parameters of the real projectile are obtained.
As compared with the traditional support vector machine classification,the method studied in this work adopts the parameter optimization method of particle swarm optimization algorithm,which not only reduces the computation cost and obtains the optimization parameters,but also improves the performance of support vector machine classifier.The recognition method presented in this work shows certain advantages in solving nonlinear and high-dimensional problems based on small sample sets.It realizes the optimal linear classification of SVM in the new space,and is accurate,stable,and computationally efficient.At the same time,the PSO-SVM method presented in this work takes the data of different high and low shooting positions as the basis for acquisition,training and testing,and provides a scientific recognition method for the target information recognition of different multisky-screens intersection test system used in field testing.
In addition,we choose the six sky-screens layout relation to set up the recognition model and algorithm,the characteristic of this spatial intersecting model is the fields of view of four oblique detection screens (M2M3M4M5) within two parallel detection screens (M1M6),the height of projectile shooting generally does not exceed the height of the intersection point ofM1andM4.This space intersection design method is conducive to the formation of the time sequence of projectiles passing through each sky-screen.For the same projectile,the time (t6-t1) must be the longest,and the other times are less than(t6-t1)between two sky-screen,and their time constraints relation are more obvious.So,this paper uses the method of particle swarm optimization support vector machine parameters to obtain the real projectile information in each sky-screen,and uses the spatial geometric constraint relationship of six sky-screens to match and calculate the parameters of the real projectile,so as to eliminate false signals of approximate projectile information.The method proposed in this paper is based on the pulse width and amplitude characteristics of the signal,sets up the recognition model and algorithm of projectiles by combining particle swarm optimization support vector and spatial-temporal constrain,it is suitable for the processing and recognition of other external interference uncertain interfering signals.The recognition model and algorithm in this paper has promotion significance.This method is not affected by the similarity of output signals in every sky-screen and is more flexible and computationally efficient.The results show that the recognition rate and accuracy rate of projectile’s information are significant increase in six sky-screens intersection test system.
Funding
This work has been supported by Project of the National Natural Science Foundation of China (Grant No.62073256),in part by Shaanxi Provincial Science and Technology Department(Grant No.2020GY-125).
Declaration of competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
杂志排行
Defence Technology的其它文章
- An energetic nano-fiber composite based on polystyrene and 1,3,5-trinitro-1,3,5-triazinane fabricated via electrospinning technique
- Dynamic response of UHMWPE plates under combined shock and fragment loading
- Aerial multi-spectral AI-based detection system for unexploded ordnance
- Model-based deep learning for fiber bundle infrared image restoration
- Robust design and analysis for opto-mechanical two array laser warning system
- Combustion behavior and mechanism of molecular perovskite energetic material DAP-4-based composites with metal fuel Al