悬臂式掘进机组合定位导航方案设计与试验
2023-09-26高梓
高 梓
(山西焦煤集团有限责任公司 官地煤矿, 山西 太原 030024)
煤矿井下掘进工作是煤矿开采的重要工作环节,掘进工艺以悬臂式掘进机和单体锚杆钻机配套作业为主。为保证悬臂式掘进机沿规划路径和方向掘进,需采用先进设备和技术,在井下完全封闭空间内准确测量悬臂式掘进机空间位置和运行轨迹,实现悬臂式掘进机自主导航,对构建少人化、无人化掘进工作面,降低掘进作业风险,推动掘进工作面的技术革命具有重要意义。通过对基于惯性器件的悬臂式掘进机组合定位导航技术方案进行研究,并完成试验与工程实践案例应用分析,为悬臂式掘进自主导航方案叠代提供参考,为掘进工作面无人化进程提供技术保障。
1 组合定位导航原理
悬臂式掘进机组合定位导航方案基于捷联惯导、里程计实现。捷联惯导定位导航系统由X、Y、Z三轴光纤陀螺仪,X、Y、Z三轴加速度计,解算芯片组成可自主测量悬臂式掘进机的航向角、解算位置、速度、姿态以及航向数据,实现静态对准,动态测量。里程计定位导航系统由编码器、张紧装置以及测量轮等组成,通过编码器检测测量轮的旋转圈数,进而计算悬臂式掘进机在纵轴、横轴方向的里程增量。捷联惯导定位导航系统具有无源特性,满足煤矿井下封闭空间内的自主导航,但存在的问题是定位误差累积严重。里程计定位导航系统精度高、自主性强,但存在的问题是位姿感知能力受限。在捷联惯导定位导航系统的基础上,引入里程计进行辅助定位,实现悬臂式掘进机在狭小密闭空间、复杂电磁环境、工况恶劣条件下的精准导航,捷联惯导与里程计组合定位导航原理见图1.
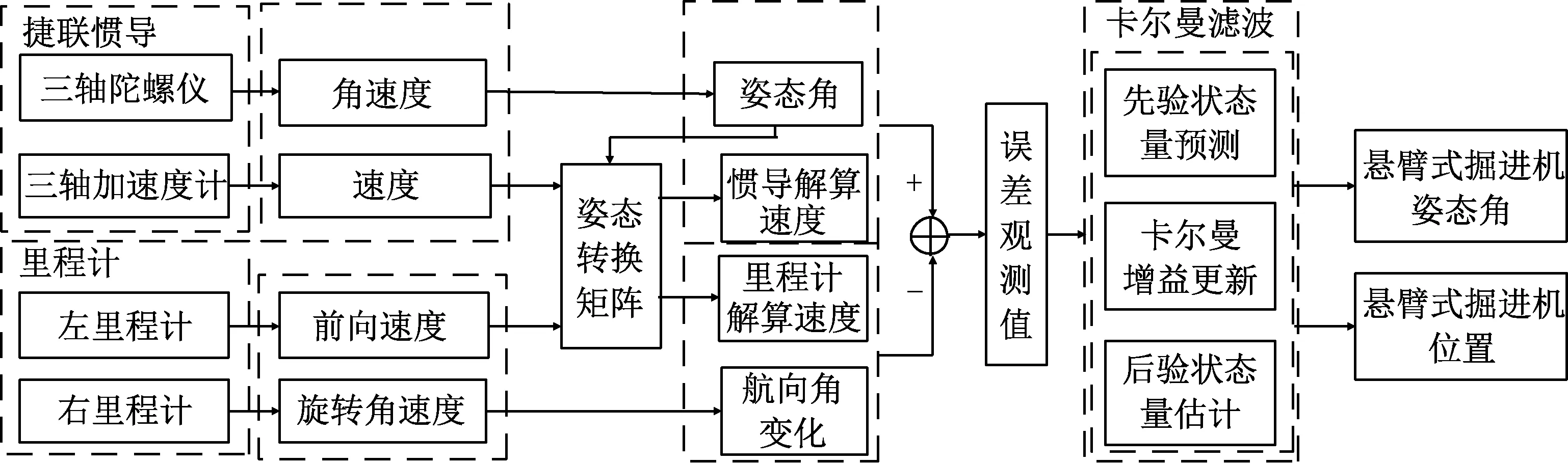
图1 捷联惯导与里程计组合定位导航原理图
2 组合定位导航方案设计
2.1 硬件设计
2.1.1 硬件选型
悬臂式掘进机组合定位导航系统硬件设计见图2,捷联惯导、里程计数据经信号调理电路、数模转换芯片后传入数据采集与处理控制器进行读取、滤波、编码。以中断模式将处理后的数据发送给解算与数据融合控制器进行解码、解算、融合、滤波、存储。

图2 悬臂式掘进机组合定位导航系统硬件设计框图
悬臂式掘进机组合定位导航系统核心硬件选型如下:

2) 加速度计。选用某型石英绕性摆式加速度计,量程为±30 g,偏值稳定性<50 μg,偏执温度系数<50 μg/℃,标度因数为1.1~1.4 mA/g,供电电源为±12 V.
3) 里程计。选用模型电磁式里程计,里程计线数为1 100,驱动轮半径为75 mm,电机加速比为100∶1,输出为正交码脉冲信号,供电电源为+5 V.
4) 数模转换芯片。选用AD7606-6数模转换芯片,采样频率为50 kHz,采样数据宽度为16位,具备钳位保护功能,供电电源为5 V.
5) 控制器。数据采集与处理控制器选用TMS320F28335 32位浮点DSP,主频为150 M,集成256KFLASH、34KSRAM,支持SCI、SPI接口,支持2*8、12位ADC. 解算与数据融合控制器选用TMS320C6784 32位浮点低功耗DSP,主频位300 M,适用于复杂算法及数据处理。
6) 存储器。选用K9F1G08U0B工业级FLASH存储芯片,存储空间位128 MB,具有抗压、抗冲击、抗强震、抗超低温等特性。
7) 触摸屏。选用3.5英寸液晶触摸屏,实时显示参数设定以及导航信息。
8) 电源模块。选用REG1117-3.3/1.8电源管理芯片,可输出3.3 V、1.8 V电压。选用线性稳压芯片MC78M05BDT输出5 V电压。
2.1.2 关键电路
1) 数据处理电路。
数据处理电路包括AD7606配置为16位并行输出,采样频率位50 kHz. K9F1G08U0B一次可存储8位数据,需对数据进行单字节处理,进行高低字节分割。
2) 电源电路。
三轴陀螺仪的供电电压为5 V,由芯片MC78-M05BDT将7.4 V电压转换为5 V电压。两个控制器以及其他大部分元件的供电电压为3.3 V,由REG1117-3.3将7.4 V电压转换为3.3 V电压,电路原理见图3.
2.2 软件设计
悬臂式掘进机组合定位导航方案软件程序位于数据采集与处理控制器、解算与数据融合控制器内,基于CCS10.1.0开发平台实现,仿真器为XDS510,软件程序设计框图见图4.
数据采集与处理控制器软件模块主要有:1) uint16 SelfTest(void)系统自检函数。2) void Coding(void)数据编码函数。3) uint16*AccFilter(uint16*Acc)加速度滤波函数。4) uint16*GyroFilter(uint16*Gyro)陀螺仪滤波函数。5) uint16*OdoFilter(uint16*odo)里程计滤波函数。由上述函数完成系统自检、惯性导航/里程计数据读取以及滤波,与解算与数据融合控制器时序同步等功能。
解算与数据融合控制器软件模块主要有:1) uint16 Decoding(void)解码函数。2) void IntegData(void)8位数据合成16位函数。3) void SplitData(void)16位分解位8位数据函数。4) uint16*SINS(uint16*sinsin)捷联惯导解算函数。5) *ODO(uint16*odoin)里程计解算函数。6) uint16*KalmanFileter(uint16*kalmanin)Kalman滤波函数。7) k9flg08u0b.c Flash读写函数。8) ManMacinterf.c触摸屏接口函数。由上述函数完成系统自检、数据解码、捷联惯导/里程计数据解算、数据融合、数据存储、数据输出及显示等功能。
除上述自定义函数外,还需调用DSP系统的引脚初始化函数、中断服务子程序函数、ADC驱动函数以及延时函数等。
3 应用案例
3.1 试验平台
试验时,以EBZ315型悬臂式掘进机为对象,采用组合定位导航方案,搭载FOG型捷联惯导、二维里程测量装置,采用基于模糊推理系统的数据融合算法对系统信号进行滤波处理。试验平台实物见图5. 捷联惯导定位导航系统安装于悬臂式掘进机机身顶部中心。二维里程计定位导航安装于悬臂式掘进机机身底部,位于捷联惯导定位导航系统正下方,精确位置为:测量轮与悬臂式掘进机纵轴线夹角为45°,两个测量轮的对称线与纵轴线重合。
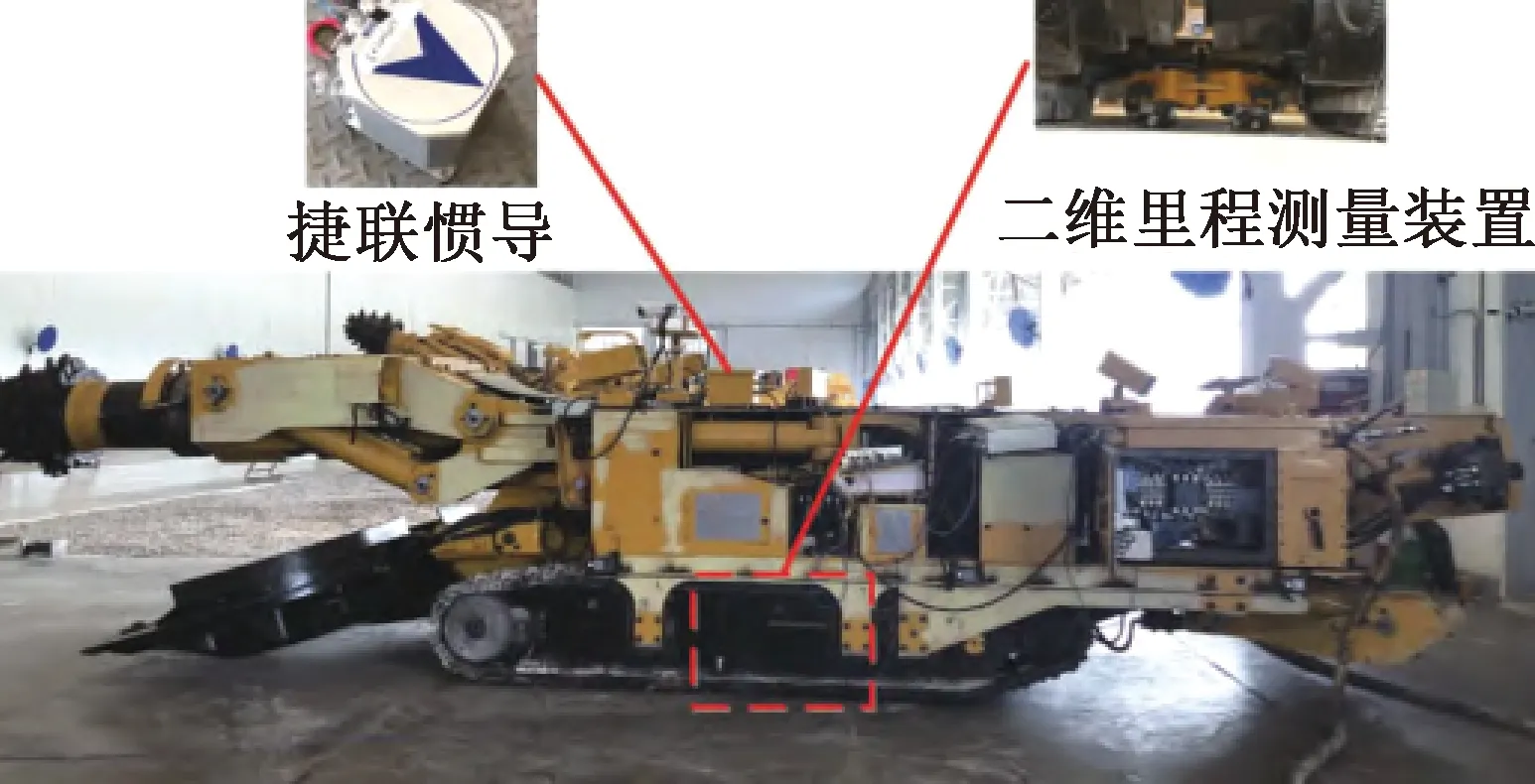
图5 悬臂式掘进机定位导航试验系统图
3.2 试验方案
悬臂式掘进机初始航向角为-74.119°,横滚角为0.351°,俯仰角为-0.557°. 根据掘进工作面“探-掘-支-锚-运”巷道掘进工艺,通过远程遥控操作控制悬臂式掘进机慢速前进、转向、停止等工况,试验时长为300 s. 试验时,采用单捷联惯导、组合定位导航两种模式采集悬臂式掘进机导航角、东向位移、北向位移以及掘进轨迹数据,解算掘进机的位置坐标并以Modbus TCP通讯模式发送至远端监控设备,同时标记点坐标形成掘进机位置轨迹,见图6.
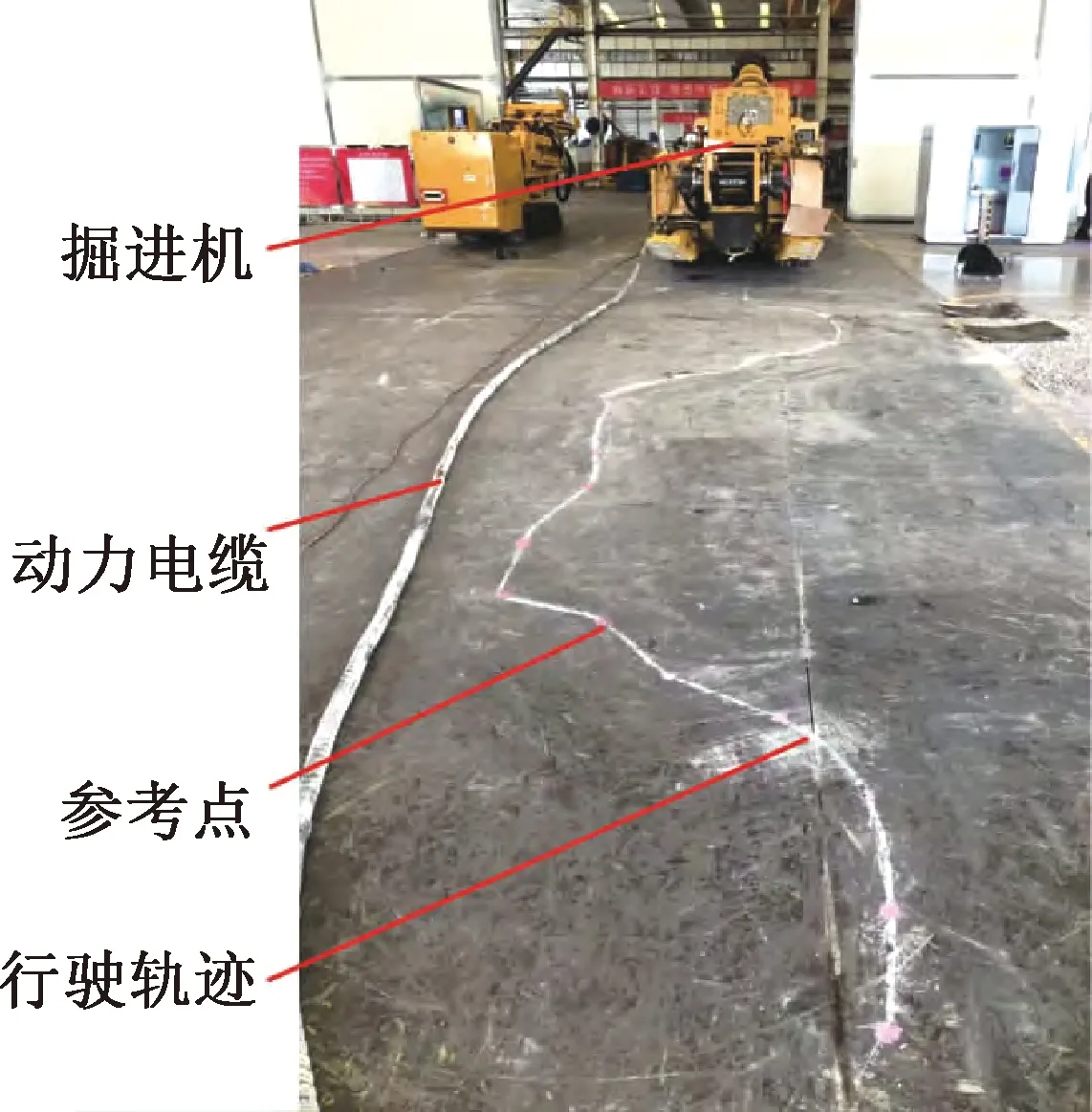
图6 悬臂式掘进机定位导航实际位置轨迹图
3.3 数据分析
试验持续300 s后,实测悬臂式掘进机东向行进位移为10.10 m,北向位移为1.31 m,航向角变化为22.77°. 图7所示为FOG捷联惯导、组合定位两种模式时掘进机航向角曲线图,随着时间的累加,FOG型捷联惯导获取的航向角与实际航向角偏离程度逐渐增加。组合定位导航获取的航向角与实际航向角更加接近,最大误差为0.672°.
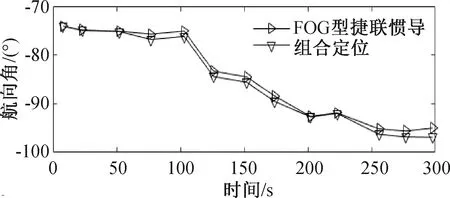
图7 悬臂式掘进机航向角曲线图
试验300 s后,悬臂式掘进机的东向位移、北向位移见图8、图9. 由图8、图9可知,随着时间的累加,FOG型捷联惯导获取的悬臂式掘进机东向位移、北向位移与全站仪获取的实际位移的偏差逐渐增加;组合定位导航获取的东向、北向位移值与实际值更加接近,东向位移平均误差为0.167 2 m,北向位移平均误差为0.120 9 m.
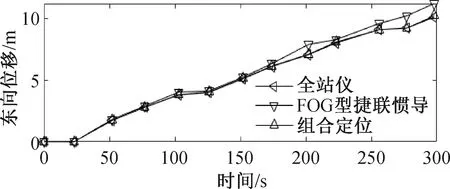
图8 悬臂式掘进机东向位移曲线图
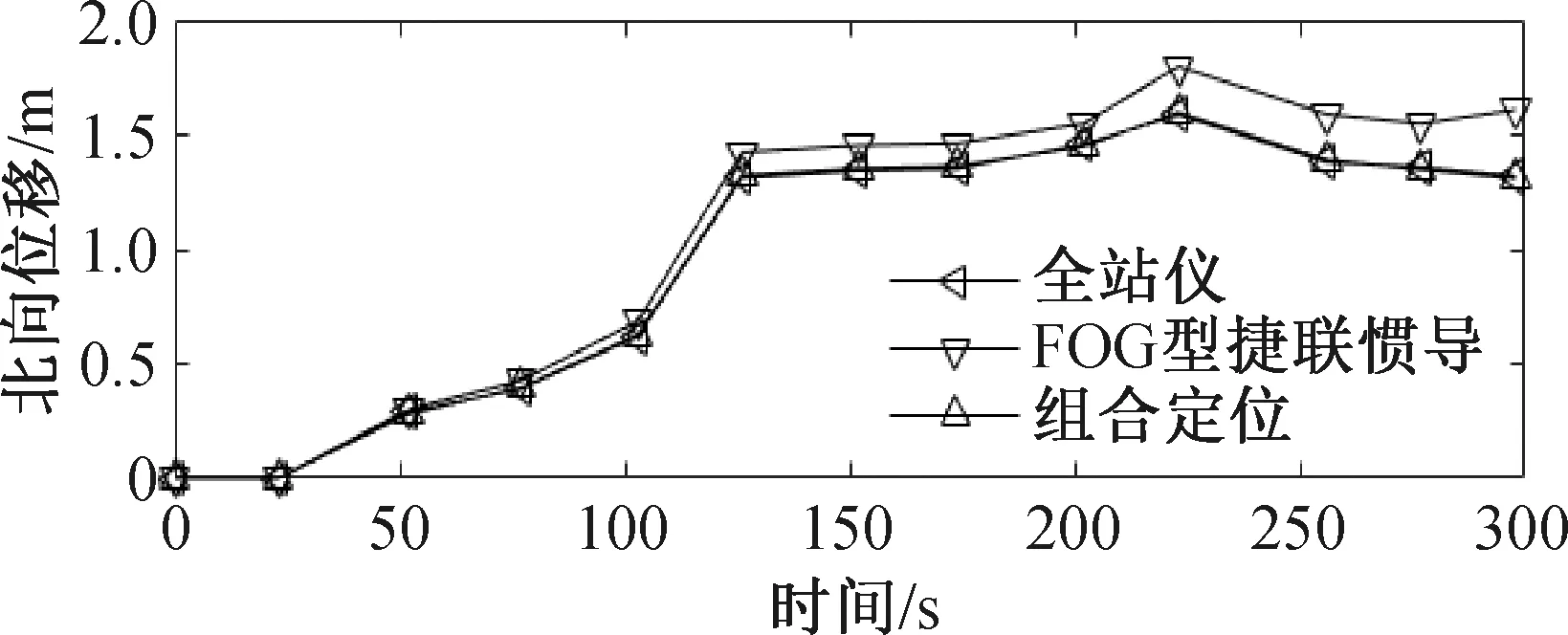
图9 悬臂式掘进机北向位移曲线图
试验300 s后,悬臂式掘进机的轨迹曲线见图10,由图8、图9组合得到,组合定位导航获取的掘进机轨迹与全站仪获取的实际轨迹更加吻合。
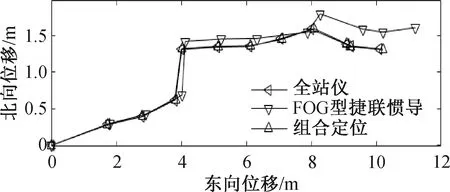
图10 悬臂式掘进机轨迹图
3.4 实际应用
应用悬臂式掘进机的定位导航方案已经在霍州煤电集团辛置矿、团柏矿,宁煤集团的乌兰矿、梅花井矿,兖州煤业的鲍店矿、南屯矿、兴隆庄矿等进行了实际应用。据现场反应,可满足掘进机智能控制所需的定位精度,为掘进工作面的少人化、无人化奠定了技术保障基础。
4 结 论
设计了一种由捷联惯导、里程计结合的悬臂式掘进机组合定位导航方案,通过试验验证可知,组合定位导航方案精度高。采用组合定位导航方案后,悬臂式掘进机航向角偏差可控制在0.672°以内,行进轨迹与全站仪获取的实际轨迹更加接近。
