面向火星表面巡视探测的热惯量反演模型及试验验证
2023-09-22常守金胡海涛
邢 琰,常守金,胡海涛,贾 永,何 俊
(1. 北京控制工程研究所,北京 100094;2. 上海交通大学制冷与低温工程研究所,上海 200240)
0 引 言
地外探测中,准确的地形识别和通过性判断是决定安全探测的关键,视觉测量能够获得表面几何和纹理特征,但无法识别影响安全通行的内部物理特性,如颗粒大小和内聚力等[1-2]。利用火星表面热物理特性辅助进行火星表面着陆和安全移动研究,是近年火星探测研究的热点之一[3-4]。
热惯量是引起物质表层温度变化的内在因素,是物质热物理特性的一种综合量度,反映了物质与周围环境能量交换的能力,也代表了物质对抗外界温度变化的能力,热惯量较高的物质昼夜温差较小。热惯量与颗粒大小和内聚力有关,以松散沙地为主的表面具有低热惯量,而以岩石或硬壳为主的硬地面具有较高的热惯量[5]。
热惯量研究最早集中在卫星遥感领域,在地质和水文研究中起着非常重要的作用。Price[6]开创了地球遥感研究的一个新视角——热惯量绘图,开发了一种将热惯性与表面温度和反射率的远程测量相关的算法,利用地球同步卫星数据对地球某部灌溉区和沙漠区之间的热惯量进行对比。但在确定热惯量精确值之前,必须估计当地天气条件对热惯量的影响。由于遥感温度测量受表面湿度和热惯量两个因素影响,仅通过卫星热红外测量温度获得的“表观热惯性”具有潜在的误导性,不适用于表面湿度变化的区域[7]。一种利用昼夜温度变化相位角信息的实际热惯性模型克服了表面湿度变化导致的热惯量模型误差,既适用于干旱地区,也适用于存在湿度变化和有植被覆盖的地区[8]。Sobrino和Kharraz[9-10]开发了热惯量估计四温算法(Four temperature algorithm,FTA),从卫星遥感数据中获得相位差,而无需地面测量有效表面发射率和大气总水汽含量数据。根据FTA获得的地球热惯量值与当地已知特性相比,相对误差约为15%。Matsushima等[11]基于热惯量与土壤含水量高度相关理论,进一步研究使用热红外遥感技术进行热惯量反演,用于估计土壤湿度,根据热惯量估计值可粗略地将土壤湿度分为湿、中和干等。针对地球或地外天体遥感数据无法获得详细的表面温度时变关系的问题,Wang等[12]提出了一种利用地表土壤热通量和温度的日振幅估算热惯量的简单方法。测试表明这种简单的方法得到的热惯量误差约为15%,为地球和地外天体热惯量估算提供了一条可行途径。
随着火星探测任务的展开,遥感领域研究人员开始着力于火星表面热惯量研究。利用火星全球勘测者上的热辐射光谱仪(Thermal emission spectrometer, TES)测量数据,Jakosky等[13]以3 km的空间分辨率绘制了火星选定区域的热惯量图,热惯量范围覆盖了从沙尘地(低值)到岩石或硬壳地(高值),用来为未来着陆器、火星车和采样返回航天器任务选择安全且具有科学价值的着陆位置;Putzig等[14]构建了一个包括火星极区的接近全球范围的完整季节性覆盖热惯量地图,空间分辨率也为3 km。两年后又处理了连续三个火星年的火星全球勘测者热辐射光谱仪观测结果,绘制了全球夜间和日间的视热惯量季节图,以分析表面性质不均匀区域的热惯量随时间和季节的变化[15]。研究结果对火星表面地质与气候建模、着陆地点选择以及其它利用热惯量作为表征特性的工作具有重要意义。为给“勇气号”和“机遇号”火星车选址,众多研究人员使用海盗号火星探测器红外热像仪(IRTM)数据、火星全球勘测者热辐射光谱仪(TES)等数据,开展与安全着陆和移动相关的火星表面热惯量研究,从100 km的大尺度分辨率开始,逐渐提高到15 km/像素、3 km/像素,最后以100 m/像素的分辨率绘制了火星白昼和夜间的热图像,这些图像以前所未有的规模揭示了火星表面的热物理性质,显示了露岩、坑洞、被大量灰尘覆盖的区域的不同热惯量[5]。
上述研究中均利用轨道遥感数据进行火星表面热惯量估计,“勇气号”和“机遇号”火星车着陆火星后,其配备的微型热辐射光谱仪(Mini TES)提供了第一次从火星表面观测热特性的机会。Fergason等[16]利用两辆火星车上的微型热辐射光谱仪数据与轨道数据联系起来,推导了每个着陆点土壤、基岩和岩石的热惯性,以量化这些区域的物理性质并了解地质发展过程。Perko等[17]利用火星车测试数据以及实验室模拟火星土壤,将火星土壤力学性质与热惯性测量结果进行了比较,并给出了相关性。
“勇气号”火星车在火星表面探测过程中因发生沉陷导致任务失败,使基于热惯量辅助地形识别、提高移动探测安全性的研究更加得到重视。Cunningham等[18]开发了一种预测地形松散程度的方法,通过一天中的温度观测数据来估计其热惯量。这种方法的有效性高度依赖于观测时间和时长,热惯量估计预期误差被表示为观测时间和时长的函数。通过沙坑试验,验证该方法预测地形可穿越性的失败率约为8%,但仍然提供了一种辅助视觉的地形安全性识别方法。Cunningham等[19]利用“好奇号”火星车的探测数据分析了热惯量在提高火星车沙地滑移预测方面的潜力。通过测算沙地行驶时每个车轮的打滑量,并利用“好奇号”的温度传感器和轨道热辐射成像系统估计热惯量,建立了热惯量与打滑的关系。“好奇号”火星车的温度传感器在标称100 m2的椭圆范围内仅给出一个温度测量值,并且每小时只测量6分钟的数据(频率为1 Hz),测量区域也不在火星车的行驶路线上,热惯量精度约为20%。尽管如此,“好奇号”火星车仍然为火星表面热惯量研究提供了前所未有的数据。
已有研究已经明确地形的疏松程度和滑移率与其热惯量具有较强的相关性,火星车可安全通过的紧实地形热惯量显著高于疏松地形[5]。但已有以火星遥感数据为主的热惯量测算分辨率和精度,无法支持火星车在自主移动时及时识别松散沙地等易滑易陷地形,并通过路径规划避开危险。Chhaniyara等[20]指出地外天体表面探测任务的成功将取决于两个关键因素——在软沙和非结构化地形上的自主性和移动性,需要在当前技术上取得进一步发展,开发智能车载传感系统,检测和识别近地表和地下地形特性,以增强移动探测的机动性。利用热惯量特性辅助视觉识别地形,成为提高火星车自主行驶安全性的可行途径,但如何利用当地实测数据获得可信的热惯量数据,仍然没有可靠的热惯量估计模型。
本文研究建立了一种新的基于热电偶测温数据求解热惯量的反演模型,并通过火星表面热特性模拟与测试系统,建立了火星表面昼夜温度环境,并通过不同类型模拟火壤材料,对所建模型的有效性进行了测试和验证,以期为了利用火星车原位测量数据获得更为精确的火壤地形下热惯量,为未来实现更安全的火星表面自主探测提供技术储备。
1 热惯量理论模型建立
热惯量综合考虑了导热系数、密度、及比热容的影响,是土壤热特性的一种综合量度,其定义为:
(1)
式中:P是热惯量,量纲为J/(m2·s1/2·K);k是导热系数,量纲为W/(m·K);ρ是密度,量纲为kg/m3;c是比热容,量纲为J/(kg·K)。
通过引入体积热容和热扩散系数,可将定义热惯量的式(1)变换为式(2):
(2)
式中:C′是体积热容,量纲为J/(m3·K);D是热扩散系数,量纲为m2/s。
开发热惯量P理论模型的关键是获取土壤的体积热容C′及热扩散系数D。体积热容C′可通过脉冲式平面热源法[21]测得,热扩散系数D可经热电偶对土壤不同深度的温度测量数据计算得到,从而可获取被测地形的热惯量信息。
1.1 热惯量计算模型
随昼夜变换,地球、火星等天体土壤表面附近的温度是周期变化的,可以用一系列正弦项来描述,并且特定深度的温度可以用标准的线性最小二乘回归技术拟合到傅立叶级数中[22]。在拟合得到的傅立叶级数中,常数项表示一昼夜内的平均温度,正弦级数项表示温度变化周期内特定深度上的温度在平均温度附近的波动量。因此,一昼夜内深度x1处温度T(x1)表示为[23]
(3)
(4)

深度x2>x1处温度变化T(x2)可表示为谐波序列,但序列中的幅值及相移均会减少[24]:
(5)
(6)
(7)
式中:x2是土壤中大于x1的某一深度,量纲为m;φn2是x2处第n次正弦谐波的相移,量纲为rad;D是热扩散系数,量纲为m2/s。
在深度x1处,通过将一昼夜的时间tR(对应于星体自转周期)分成四个相等的时段,即式(3)中ωt分别取0、π/2、π、3π/2,可推导得到:
(8)
2T1cosφ1
(9)
式中:Ta,Tb,Tc,Td分别为土壤在一昼夜内第0、tR/4、tR/2、3tR/4时刻的时均温度,量纲为K。对式(5)~(6)作近似的依据是三次及高次谐波的幅值远小于一次谐波[25]。同样地,可以推导得到x2处(Ta-Tc)与(Tb-Td)的近似解。
令土壤特定深度x处温度差值(Ta-Tc)与(Tb-Td)的比值为无量纲参数R(x):
(10)
根据式(9)~(10),x1处和x2处R(x)可近似为
R(x1)≈-tanφ1
(11)
(12)
在R(x1)与R(x2)的近似解相等时,可推导出D的显式解[21]:
(13)
根据上述公式,只需要选择开始测温的时间以及两个测温的深度,利用热电偶在一昼夜内每隔四分之一tR测量土壤两个深度处的温度,即可计算得到土壤的热扩散系数。结合式(2),得到了热惯量的计算公式:
(14)
式中:R(x1)与R(x2)可分别用深度x1与x2处的温度测量数据获取。
1.2 热电偶测温
基于上述的热惯量计算模型,利用热电偶测量一个昼夜内两个不同深度x1,x2的温度T(x1),T(x2),可对测点位置的热惯量进行计算。热电偶的布置方式如图1所示。热惯量的计算流程如图2所示。
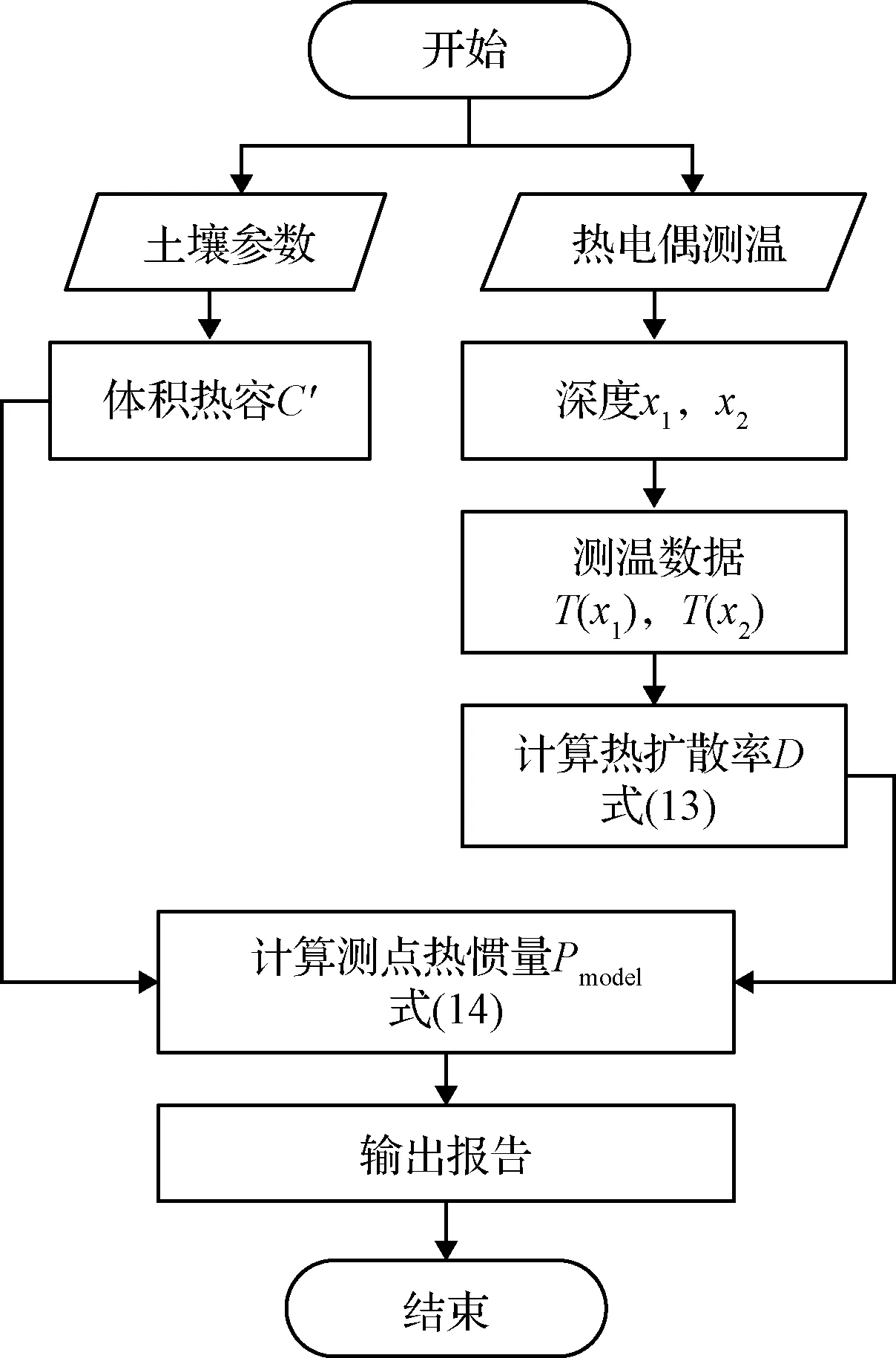
图2 热惯量计算流程Fig.2 Thermal inertia calculation process
2 模型的试验验证
为了验证热惯量理论模型,在室内建设了火星表面热特性模拟与测试验证系统,对不同模拟火壤材料及地形的热惯量反演值和实际值进行了试验测量,从而验证模型精度。
验证系统通过辐照式加热装置和预埋式制冷装置,在模拟火星土壤地形上实现类似于火星表面温度变化规律的温度环境,主要包括火壤底部恒定的低温条件以及表面温度曲线特定的正弦变化规律,如图3所示。

图3 验证系统Fig.3 Verification system
模型验证试验采用五种不同颗粒度和厚度的沙子作为模拟火壤材料,如图4所示。将图示的五种材料分别布置在测点1到测点5的位置上。

图4 模型验证试验采用的5种材料Fig.4 Five materials used in model validation experiments
采用T型热电偶对五个测点处模拟火壤两个不同深度的温度变化数据进行测量,热电偶的布置方式如图5所示。经校正的热电偶精度为0.1 ℃。

图5 五种地形在测试平台上的布置方式Fig.5 Arrangement of the five terrains on the test platform
本文基于测试平台对模拟火壤的温度测量数据,通过上文建立的热惯量反演模型,计算得到了测点1~5处的热惯量值Pmodel。将Pmodel与通过测量式(1)基础物性(k,ρ,c)[21]计算得到的热惯量实际值Pactual进行对比,验证模型的反演精度。热惯量模型反演精度δ表示为反演绝对误差与被测量实际值之比,即Pmodel与Pactual之间的相对误差,如式(15)所示:
(15)
如表1所示,通过试验得到了五个测点处的热惯量模型反演值Pmodel、实际值Pactual、及模型的反演误差δ。由表可知,热惯量模型反演误差的最大值小于6%,可以很好地反映被测区域热惯量的实际值。因此,本文建立的热惯量反演模型可基于热电偶的测温数据,较为准确地获得目标区域的热惯量。

表1 不同测点区域的试验数据Table 1 Test data of different measuring areas
3 结 论
本文研究提出了一种基于热电偶测温数据的热惯量模型,该方法利用温度实测值估计当地热惯量,并基于不同模拟火壤的热惯量试验数据,对模型正确性进行了试验验证,得到如下结论:
1)热惯量计算模型可基于热电偶在一天中对土壤两个深度的温度测量数据准确预测被测区域的热惯量信息;
2)模型验证结果表明,理论模型对热惯量的预测偏差小于6%,优于现有的基于轨道遥感数据的热惯量模型,可以很好地反映被测区域的热惯量实际值。
本文方法为土壤近表面热惯量测量估计提供了一种技术途径,火星车可以通过配置相应温度测量传感器,在线获得行驶前方区域内的热惯量值,通过联合视觉、滑移等测量数据,准确识别地形可通行性,有效提高地外巡视探测的移动安全性。本文方法开启了一条火星车实地测量反演热惯量的研究思路,后续将进一步深化研究和验证,获得更加可靠的高分辨率高精度热惯量模型。