雷达网探测高超声速目标时间分配
2023-09-22郑建成曲智国谭贤四李志淮
郑建成,曲智国,谭贤四,李志淮,朱 刚,袁 博
(1. 空军预警学院,武汉 430019;2. 中国人民解放军95246部队,南宁 530007)
0 引 言
多功能相控阵雷达具有波束敏捷转向、自适应任务调度、可变波形等多种能力,可较好改善雷达的探测性能和跟踪精度,在导弹防御中发挥着举足轻重的作用[1]。但是,执行某个任务耗费的资源增加必然导致执行其它任务的可用资源减少,随着防空目标的日趋复杂多样,可用的资源总量有限使得单一雷达系统面临的挑战越来越明显,而联网的多功能相控阵雷达系统不仅能提供更高的探测性能,还能权衡利用网内雷达的资源以完成多空域多目标探测任务。
目前,关于雷达探测临近空间高超声速目标(Near space hypersonic target, NSHT)的研究多集中于跟踪方法、信号检测、轨迹预测等方面[2-5]。文献[2]针对单一的Sine模型算法无法与NSHT滑跃式轨迹准确匹配的问题,利用多重贝叶斯准则在线调整多个Sine模型权重和模型转移概率矩阵,实现了对高超声速滑跃式目标的有效跟踪。文献[3]针对NSHT回波信号相参积累时存在的跨距离门和多普勒扩展问题,根据目标加速度和加加速度的变化区间对其估计值进行搜索,同时利用多尺度搜索的方法解决搜索尺度和搜索计算量之间的矛盾,完成了相参积累。文献[4]针对雷达探测NSHT时回波信号与多普勒频率分量耦合会产生虚警的问题,通过构造脉内多普勒频率和脉间多普勒频率补偿函数提高真实目标的能量增益,为NSHT的有效探测与跟踪提供了理论方法。文献[5]针对NSHT机动性强、轨迹预测困难的问题,通过集合经验模态分解对预测参数进行分解和重构以减少噪声干扰,利用去噪后的气动加速度数据对注意力长短时记忆网络进行训练,进而预测未来气动加速度数据并重构未来轨迹,取得了较好的预测精度。
而在应对NSHT时的雷达资源优化运用方面,多数现有研究侧重于单部雷达的搜索参数优化设计和目标快速捕获策略[6-8],既没有考虑联网协同探测时网内雷达之间存在交接目标的问题,也没有考虑到网内单部雷达跟踪容量有限的问题。而文献[9]以NSHT总的威胁度最大、交接率最小为目标函数建立雷达网目标分配模型,虽然涉及雷达跟踪容量和目标交接,但该模型未考虑目标交接条件和对NSHT机动能力的适用性,且仅仿真验证了分配算法对两部雷达分配目标的有效性。对此,根据已获得的NSHT轨迹信息计算出多部雷达对其可见时间窗,即每部雷达能够探测和跟踪NSHT的时间段,建立考虑雷达跟踪容量、跟踪数量、交接条件和时间间隔占用性约束的目标分配模型并探索可行的求解算法,得到对目标全程无缝跟踪的时间分配方法,可为防御NSHT的多传感器协同探测预先任务规划提供有益参考。
1 问题描述
NSHT因速度快、机动性强、轨迹灵活多变而对防御方高价值资产构成了严重威胁[10],其运动方程为
(1)
式中:h为目标飞行高度;Ω为横向射程角;Ψ为纵向射程角;v为速度;γ为航迹倾角;κ为航向角;R为地球半径;D=1/2ρv2CdA为气动阻力,L=1/2ρv2ClA为气动升力,Cd,Cl分别为阻力系数和升力系数,A为目标的有效横截面积;σ为飞行器的倾侧角;g=g0R2/(R+h)2为离地面h处的重力加速度,g0=9.8 m/s2为海平面处重力加速度;ρ=ρ0exp(-h/H)为大气密度,ρ0=1.752 kg/m3,H=6 700 m;m为飞行器的质量。根据式(1),当NSHT初始滑翔速度为Ma20、初始高度为80 km时,假设其运动至t=1 500 s时为规避防御方而做机动飞行,其在不同倾侧角机动时的可达范围如图1所示。
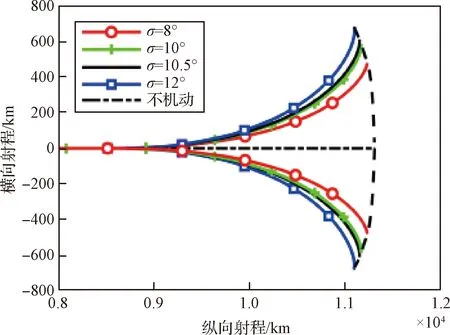
图1 NSHT可达范围Fig.1 Footprint of NSHT
根据文献[11],为保证捕获到NSHT,雷达的最大横向覆盖距离仅约1 231 km。结合图1可知,当NSHT的倾侧角σ≤10.5°时,雷达才能完全覆盖其可达范围。当多个NSHT来袭时,为解决单部雷达对此类目标视距近和无法持续探测[12]的问题,就需要通过多部雷达组成雷达网形成对NSHT的有效覆盖范围,通过足够的可观测资源保证任务观测的连续性并实时更新目标状态,从而实现综合态势感知。
NSHT机动转弯会造成很大的阻力从而影响飞行速度和射程,远程NSHT在飞行过程中为节省能量以达到既定的射程就会在飞行后期为规避防御方而机动转弯[13]。因此,在预先任务规划阶段,基于天基红外系统(Space-based infrared system,SBIRS)、早期预警雷达(Early warning radar,EWR)提供的目标先验信息,地基、海基雷达组成的雷达网就可以通过NSHT的发射区域和长时间的轨迹预测来分配网内各雷达的探测任务[13-14]。基于NSHT的飞行任务剖面包括助推段、滑翔/巡航段、末段[15],考虑如图2所示SBIRS/ EWR、宙斯盾SPY-6雷达、萨德AN/TPY-2雷达组成的联合防御体系应对多个NSHT的攻防博弈场景,在SBIRS/EWR系统获得目标的先验信息后,指挥、控制、作战管理与通信系统(Command and control,battle management and comm-unication,C2BMC)主要通过调度宙斯盾SPY-6雷达网获得对NSHT的精确跟踪信息,而萨德AN/TPY-2雷达主要担负末段防御时的预警探测任务[16]。为尽可能长时间地稳定跟踪目标,C2BMC通过时间资源管理对网内雷达的探测时间进行预先分配[17]。滑翔/巡航段的反临雷达网探测时间分配应考虑三个问题:(1)目标优先级;(2)目标跟踪的连续性和持久性;(3)网内雷达之间尽量少交接目标。因此,根据已获得的目标轨迹信息计算出雷达对目标的可见时间窗,即每部雷达能够探测和跟踪目标的时间段,寻求考虑目标交接影响的雷达探测时间分配方法,以实现对每个NSHT的跟踪时间最长,是反临雷达网进行任务规划不得不考虑的问题。
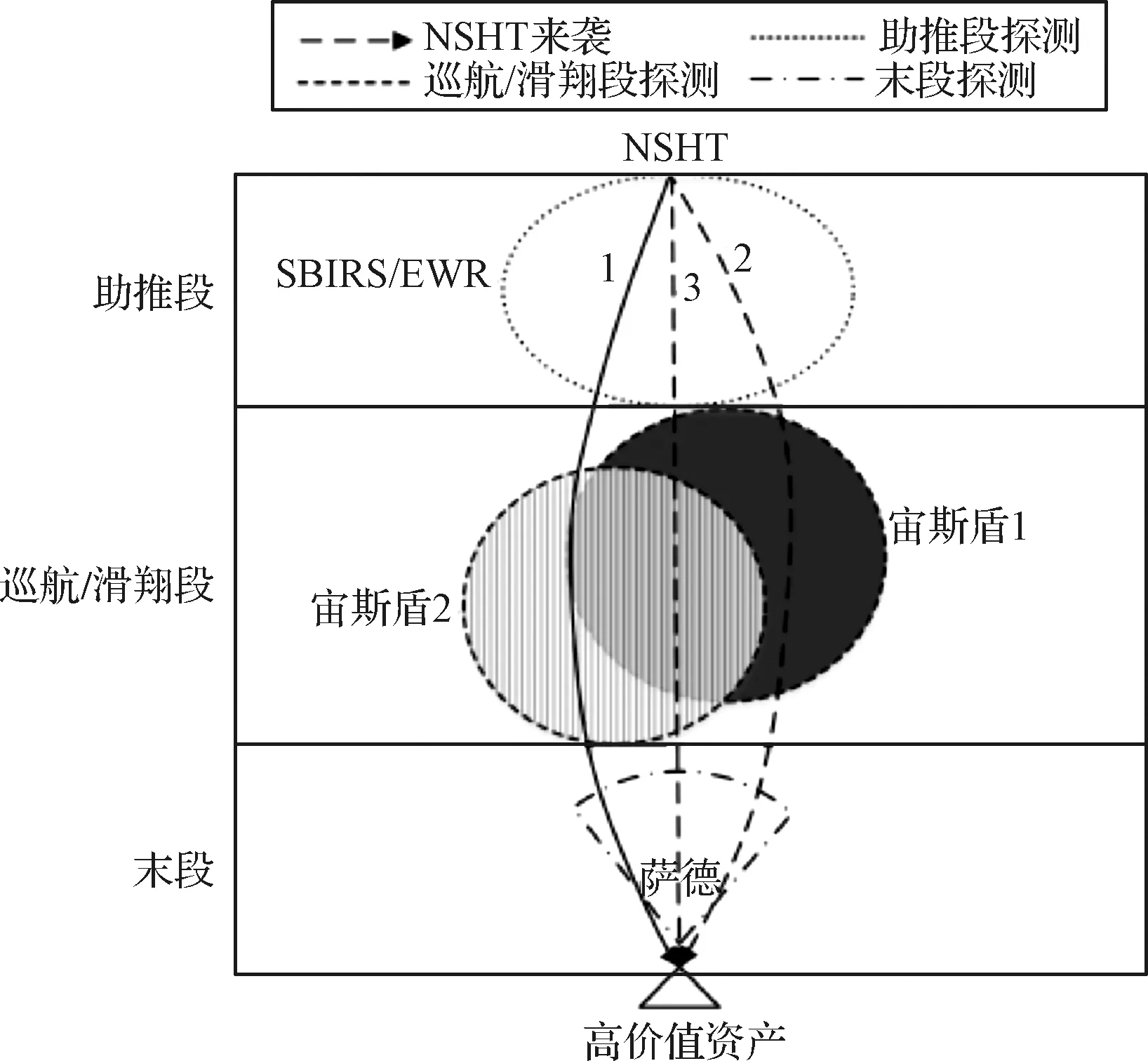
图2 NSHT攻防博弈场景Fig.2 Scene of penetration game


图3 雷达网跟踪时间分配示意图Fig.3 Diagram of radar network tracking time allocation

2 时间分配模型
基于问题描述的过程,为建立雷达网探测多个NSHT的时间分配模型以进行探测任务规划,本文假设NSHT的发点先验信息由SBIRS/EWR提供,C2BMC可采用现有技术手段对其轨迹进行预测并确认威胁区域,网内雷达对每个NSHT的可见时间窗在目标剩余飞行时间内,雷达网之间不存在交接技术难题且能够实时共享信息,所有雷达的集合记为D,所有目标的集合记为T,所有时间间隔的集合记为I,建模过程中使用的参数如表1所示,决策变量如表2所示。其中,目标优先级ωt由目标的距离rt和剩余飞行时间τ决定,其计算公式[18]为

表1 参数列表Table 1 List of parameters

表2 决策变量Table 2 Decision variables
(2)
式中:τ0,ατ,r0,αr,βr为决定sigmoid函数形状的参数。
2.1 约束条件
根据问题描述的过程可知,目标t被跟踪与否取决于是否有雷达对其进行跟踪,因而∀t∈T,有
Xt=max{Xt,1,Xt,2,…,Xt,ND}
(3)
2.1.1持续跟踪时长约束

(4)

(5)
2.1.2时间间隔占用性约束

(6)
2.1.3跟踪雷达数量约束
为节约资源,本文限定稳定跟踪某个目标时只需一部雷达即可,只有在交接目标时的短暂时间内才会发生两部雷达同时跟踪同一个目标的情况,因此在某个时刻对同一个目标进行跟踪的最大雷达数量为2, 即∀t∈T,i∈I,有
(7)
2.1.4雷达跟踪容量约束
考虑到雷达在特定时刻只能跟踪Nc个目标,∀r∈D,i∈I,有
(8)
2.1.5交接约束

(9)

Yt,r1,r2+Xt,r≤1
(10)
2.2 模型构建
根据上述约束条件,为实现雷达网对多个NSHT的无缝跟踪时间分配,同时使得雷达网对所有目标可持续跟踪时间之和最大和对目标的交接次数最少的数学公式可表示为
(11)

综上,雷达网探测多个NSHT的时间分配数学模型为
(12a)
(12b)
2.3 模型求解

步骤1:初始化,根据任务规划时间T、雷达数量ND和目标数量NT产生相应规模的时间窗,目标函数值置零;

步骤3:置当前目标序号t=1,时间间隔序号i=1,令r=r+1、i=i+1,若r≤ND、i≤NI,根据式(6)所示的时间间隔占用性约束条件判断雷达r能否在时间间隔i跟踪目标t,若是则进入步骤4,否则返回步骤2;


步骤6:根据式(2)计算各雷达对目标t的目标优先级ωt和当前对目标t的目标函数值f,令t=t+1,若t>NT,进入步骤7,否则返回步骤3;
步骤7:对t∈T,判断目标函数值f是否取得最大值,若是则选择对目标t进行跟踪,更新目标函数值f、雷达网的可用时间窗和相应的雷达序号r,判断雷达r的跟踪容量是否使用完毕,若是进入步骤8,否则返回步骤2;
步骤8:结束。
算法执行流程如图4所示。
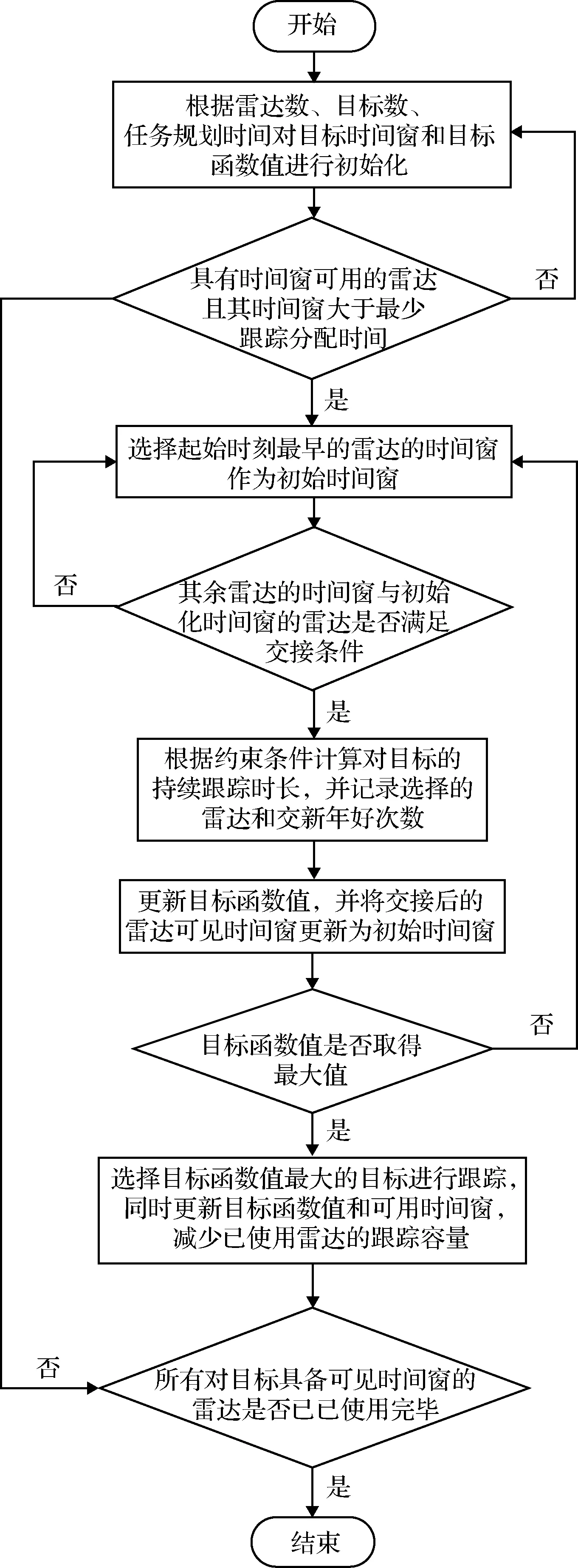
图4 贪心算法流程图Fig.4 Greedy algorithm flowchart
3 仿真校验
3.1 仿真条件
为验证建立模型的正确性和所提求解算法(算法一)的有效性,本节分别对不同雷达数和目标数的情况进行仿真分析,讨论雷达跟踪容量和目标交接对模型求解结果的影响,然后将依次选择时间窗最长的雷达参与跟踪的贪心算法(算法二)和Cplex精确求解算法(算法三)与算法一进行对比分析。模型求解由MATLAB R2022a完成,计算是在一台装有Intel(R)Core(TM)i7-10510U CPU @ 1.80GHz 2.30 GHz的CPU和16GB内存的笔记本电脑进行的。


表3 仿真参数Table 3 Simulation parameters
3.2 性能分析
3.2.1模型和算法验证
首先对雷达数多于目标数的情况进行分析。由于网内雷达数量较多,假设每部雷达参与目标跟踪的概率为60%,目标跟踪容量Nc=2,根据尽可能保持雷达网对目标的持续跟踪时间最长的时间窗口选择原则,图5给出了采用所提方法使用10部雷达在不同时间窗口对NSTH的跟踪时间分配结果。从图5(a)可见,雷达网对目标的跟踪发生了2次交接,分别是348 s处的雷达2和雷达3、653 s处的雷达3和雷达7;虽然雷达5、9、10也对NSHT具备可见时间窗,但本文所提贪心策略将目标分配给雷达2、3、7进行跟踪,保证了满足最小跟踪分配时间约束的同时尽可能长时间地持续跟踪目标。在图5(a)的基础上,图5(b)给出了同样的10部雷达跟踪2个目标的时间分配结果。为实现对每个目标的持续跟踪时间最长,图5(b)显示雷达网跟踪目标1需要2次交接,而跟踪目标2需要3次交接,验证了所建立的雷达网探测多个NSHT的时间分配数学模型的正确性。

图5 雷达网最优跟踪时间分配Fig.5 Optimal tracking time allocation of radar network
3.2.2雷达跟踪容量的影响
使用表3给出的仿真参数,图6给出了用3部雷达组成的雷达网跟踪15个目标的时间分配结果。从图中的红色方框可见,当雷达跟踪容量Nc=5时,根据本文提到的60%的探测概率,除了目标1、4、5、15不能被探测和跟踪外,雷达1、2、3被分配跟踪其它11个目标,且对目标3的跟踪仅雷达1的时间窗口可用;而当雷达跟踪容量增加至Nc=8时,雷达网跟踪了所有15个目标,且在图6(a)的基础上,雷达1和雷达2的所有可用时间窗口部分都参与了对目标3的跟踪,延长了跟踪时间。特别是,考虑图6中380 s和460 s时被跟踪的目标数量,从图6(a)中可以看出雷达网380 s和460 s时分别可以跟踪7个目标和5个目标,而从图6(b)中可以看出雷达网380 s和460 s时分别可以跟踪12个目标和11个目标。由此可见,随着雷达跟踪容量的提高,雷达网可跟踪的目标数量显著增加,从而使得对目标的整体跟踪时间增加。

图6 3部雷达跟踪15个目标的时间分配Fig.6 Time allocation for 3 radars tracking 15 targets
3.2.3目标交接的影响
根据前述分析可知,对目标函数最终取值影响较大的是目标函数的第一项,即雷达网对目标跟踪时长的总和f1。对此,本小节假设ND=5,NT=50、Nc=10,f1的权重系数k1=1,其它仿真参数见表3,讨论目标函数中交接处罚项的权重系数k2对目标函数的影响。当k2的取值范围为5~100时,目标函数值和交接次数的变化情况如图7所示。显然,目标函数值随着k2的增加而减少,而交接次数呈阶梯式下降。同时,当k2取较小值时,可以获得较大的目标函数值,但存在较多不必要的交接。因此,选择k2使得交接次数的减少不再明显,同时能够获得一个较大的目标函数值,将是权衡目标函数值最大和交接次数最少的最佳决策。而从图7可见,k2按此决策方法应该选取的最佳值为40。

图7 交接对目标函数的影响Fig.7 Effect of handover on the objective function
3.3 性能比较
为进一步验证所提方法的有效性,利用3.2.3节相同的仿真参数及其权重系数选取原则,本节将算法一~算法三进行对比分析。表4采用100次蒙特卡罗仿真取平均值后比较了三种算法可跟踪的目标总数、目标交接次数、目标函数值和算法耗时情况。

表4 三种算法求解结果比较Table 4 Comparison of the solution results for the three algorithms
就表4所示的目标函数值而言,采用算法一求解的结果为339.25,而采用算法二、算法三求解的结果分别为320.19、351.32,性能分别相差约5.9%、3.5%,这主要是由于采用算法一、算法三求解时雷达网跟踪的目标数明显多于采用算法二求解的结果。从算法原理上看,算法三是采用精确算法得到的全局最优解,算法一选择的是起始时刻最早的雷达的可见时间窗作为初始跟踪时间窗,然后依任务规划时间顺序选择其它对目标具备可见时间窗的雷达参与跟踪任务,而算法二是依次选择可见时间窗最长的雷达参与对目标的跟踪任务,算法一比算法二更符合预警作战任务实际,因为在实际的NSHT预警探测任务中,C2BMC必然是首先调度能够最早发现NSHT的雷达执行跟踪任务,然后以保证对该NSHT的持续跟踪时间最长为目标,依次调度网内满足交接条件的其它雷达进行接力探测,而不是依次调度对目标可见时间窗最大的雷达参与跟踪任务,因此每部雷达可跟踪的目标数:算法三>算法一>算法二。
同时从表4可见,采用算法一求解时雷达网可跟踪27个目标,网内雷达之间发生了23次交接,算法耗时3.66 s,而采用算法二求解时雷达网可跟踪的目标减少至24个,网内雷达之间却发生了26次交接,比算法一的交接次数还要多3次,算法耗时也增加至4.05 s,比算法一增加了11%,算法三则以比算法一微弱的性能优势(少交接3次、多跟踪2个目标)得到了较大的目标函数值,但是其算法耗时却高达484.4 s,分别是算法一、算法二的132.4倍、119.6倍,使得其不适用于防御NSHT这类高速、高机动目标,因为即使是以Ma5的速度飞行,NSHT在484.4 s的时间内也飞行了823.5 km,这将使得防御方无法获得充足的反应时间,从而对其高价值资产将构成严重威胁。
虽然减少交接次数有利于提高雷达网的联合探测性能,但算法三求解响应时间过长,不适用于预警探测NSHT。算法一则以比算法二更少的交接次数跟踪了更多的目标,同时获得了对目标较长的持续跟踪时长,算法耗时也最少,与算法二、算法三相比其性能较优,可在提供较好跟踪性能的同时为拦截器的战斗准备提供更多的时间。
4 结 论
本文建立的模型同时考虑了雷达跟踪容量、跟踪数量、交接条件和时间间隔占用性约束,能够实现雷达网对所有目标可持续跟踪时间之和最大和对目标的交接次数最少,同时避免了不必要地同时跟踪多个NSHT,可作为一种探测预案应用于雷达网预警探测NSHT的预先任务规划中。典型参数条件下的仿真表明:1)雷达的跟踪容量对雷达网的探测性能具有显著影响,雷达网可跟踪的目标数和持续跟踪时间随着随着雷达跟踪容量的增加而增加;2)对模型目标函数值影响较大的是雷达网对目标跟踪时长的总和,交接处罚项的权重系数的选取原则为使目标函数值尽可能大和交接次数尽可能少;3)对模型求解时,依次选择可尽早发现NSHT的雷达参与跟踪的贪心策略在算法性能、交接次数和可跟踪的目标数方面可获得较好结果,有利于提高雷达网的联合探测性能。本文主要针对当NSHT的倾侧角σ≤10.5°、雷达可对其形成有效覆盖范围的静态时间筹划问题,后续可考虑NSHT机动能力较强、雷达仅部分时间窗口可见的情况,建立适用性更强的模型进行动态时间分配方法的探讨。