基于半波交替的轻型化MMC 拓扑及控制策略
2023-09-18高玉华孙玉巍
高玉华,王 琛,王 毅,张 振,许 同,孙玉巍
(河北省分布式储能与微网重点实验室(华北电力大学),河北省 保定市 071003)
0 引言
凭借输出电压质量高及易于拓展等优势,模块化多电平换流器(modular multilevel converter,MMC)已成为目前柔性直流输电技术的通用换流器方案,且已应用于张北±500 kV 四端直流电网、昆柳龙±800 kV 三端混合直流输电等多个直流工程[1-2]。受电力电子器件通流能力和耐压强度难以大幅提高的限制,MMC 只能通过增加级联子模块数量来适应高电压、大功率应用场景。然而,即使采用半桥子模块(half-bridge submodule,HBSM),MMC 需要的开关器件数量也约为两电平换流器的2 倍,且大量分散的储能电容导致换流器的体积和重量显著增加,造成换流站具有体积大、重量重和造价高等弊端[3],限制了其向远海风电经柔性直流送出、土地资源受限城市电网互联等对重量、体积要求严苛领域的进一步拓展。
子模块电容是MMC 交直流功率变换的媒介,需要足够大才能满足高储能需求并抑制电压波动在合理范围,其体积和重量在子模块的占比超过50%[4-5]。因此,降低容值或减少电容使用量成为MMC 轻型化研究的主要切入点。受限于功率变换的高储能需求,利用三次谐波电压注入、过调制等控制策略减小电容电压纹波,虽可降低对容值大小的要求[6-8],但轻型化程度有限。
与降容控制策略相比,通过改进拓扑减少电容使用量是实现MMC 轻型化更为有效的方式。结合两电平换流器和MMC 的结构特点,文献[9-14]提出了多种混合型多电平换流器,该类拓扑主要包含两部分:由电力电子开关器件串联构成的导通开关和由子模块级联构成的整形电路。其中,通过将整形电路引入两电平换流器的交流侧或直流侧,文献[9-10]和文献[11]分别提出了一种混合级联多电平换流器,可显著降低子模块数量,但存在导通开关承受电压高及动态均压问题。通过将导通开关和整形电路串联构成桥臂,文献[12]提出了一种桥臂交替多电平换流器(alternate arm multilevel converter,AAMC),可利用导通开关控制上、下桥臂工频交替导通,以降低子模块数量需求,但仅能稳定工作于特定的电压调制比。对此,文献[13-14]进一步对桥臂导通交叠角、移相角等进行了研究,改善了AAMC调压范围窄的问题。另外,文献[15]提出了一种桥臂复用型MMC(arm multiplexing MMC,AMMMC)拓扑,通过在交流侧引入桥臂切换开关对复用桥臂进行时分复用,提高了子模块利用率,实现了MMC 轻型化。
为了进一步减少子模块以降低电容使用量,本文结合桥臂交替导通思想和桥臂时分复用思想,提出了一种半波交替型模块化多电平换流器(halfwave alternating MMC,HA-MMC),包括该换流器的一般拓扑形式、所含子模块数最少的简化拓扑形式,以及采用移相切换(phase shift switching,PSS)策略且具有宽运行范围的半桥型拓扑形式。通过导通开关和切换开关的相互配合,所提HA-MMC 可实现对复用桥臂整形电路的交替时分复用,大幅减少了所需子模块数量,显著提升了MMC 的轻型化程度。
本文首先提出HA-MMC 拓扑结构,并对其运行模式、能量平衡条件和调制原理等进行阐述;其次,采用移相切换策略以拓宽HA-MMC 的运行范围,提出半桥型HA-MMC 拓扑;接着,从器件和损耗两方面分析HA-MMC 的经济性,并与典型模块化多电平拓扑进行对比;最后,搭建MATLAB/Simulink 仿真模型对所提HA-MMC 拓扑的可行性及其控制策略的有效性进行验证。
1 HA-MMC 的拓扑结构
通过引入导通开关和切换开关,HA-MMC 拓扑可实现对MMC 的轻型化改造。图1(a)给出了所提HA-MMC 的一般拓扑形式,每相单元由整形电路、导通开关和切换开关构成,并将桥臂划分为上、下及复用3 个桥臂,其中,上、下桥臂由整形电路和导通开关串联构成,复用桥臂则只包含整形电路。导通开关仍由多个含反并联二极管的绝缘栅双极型晶体管(insulated-gate bipolar transistor,IGBT)串联构成,用以控制上、下桥臂的通断。图中:usa为换流器所连接交流电网a 相电压;ua为a 相输出电压;Udc为直流母线电压;SM 表示子模块。
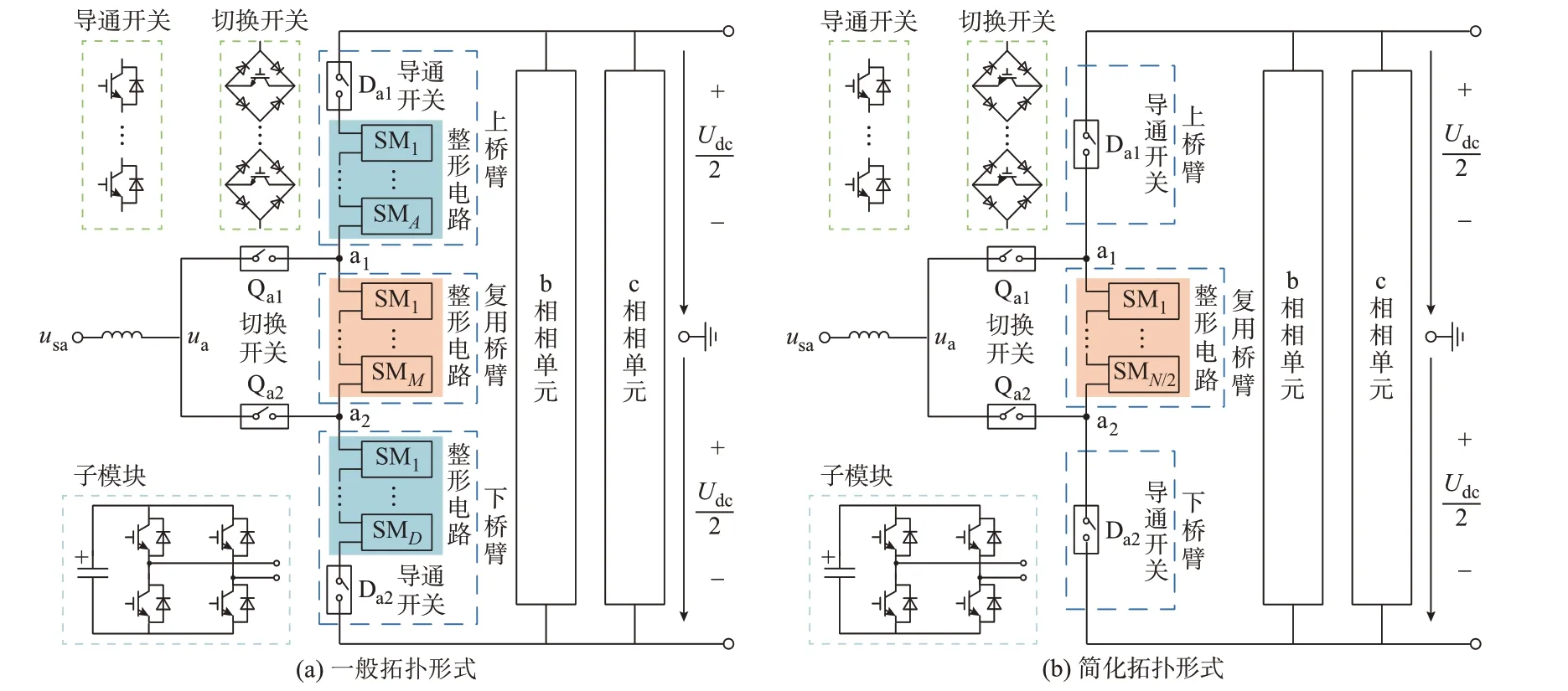
图1 三相HA-MMC 的拓扑结构Fig.1 Topology of a three-phase HA-MMC
从交流输出电压形成机理来看,HA-MMC 与AAMC 更为相似。在不施加改进控制策略时,HAMMC 只能稳定工作于过调制状态,子模块需要采用具备双极性电压输出能力的全桥子模块(fullbridge submodule,FBSM),导致切换开关在关断时承受双向电压。因此,本文设计了由多个双向开关串联构成的切换开关。所采用的双向开关由IGBT和二极管整流桥构成,可主动通断双向电流,并在关断时承受双向电压。
设上桥臂、下桥臂及复用桥臂所含子模块数分别为A、D和M,它们之间满足:
式中:N为MMC 每桥臂包含的子模块数。
由式(1)可知,与每相单元分别包含N和1.5N个子模块的AAMC、AM-MMC 相比,HA-MMC 包含的子模块数减少,介于0.5N与N之间。令A=D=0、M=0.5N,可得到HA-MMC 所含子模块数最少的简化拓扑形式,如图1(b)所示。此时,整形电路全部移至复用桥臂,上、下桥臂仅由导通开关构成,但为保证耐压,导通开关和切换开关需要的开关器件数量会有所增加。
与MMC 相比,HA-MMC 可将每相单元子模块数由2N降至0.5N,电容数减少75%,从而显著地实现轻型化目标。下文将重点分析图1(b)所示的简化拓扑形式,进一步对HA-MMC 的工作原理、调控方法等进行阐述。
2 HA-MMC 的运行机理
2.1 运行模式
对于HA-MMC,通过上、下桥臂导通开关和交流侧切换开关的相互配合,三相单元每半波周期(电网工频的2 倍频周期)进行相单元运行模式切换,以实现整形电路的交替复用,最终完成换流器交直流功率变换。以a 相为例,图2 给出了HA-MMC 相单元的2 种运行模式。当a 相电压参考波大于零时,Da1、Qa2开通,Da2、Qa1关断,a 相单元运行于上桥臂导通复用模式;当a 相电压参考波小于零时,Da1、Qa2关断,Da2、Qa1开通,a 相单元运行于下桥臂导通复用模式。因此,Da1和Qa2的通断信号一致,Da2和Qa1的通断信号一致,2 组开关交替互补通断,且通断频率仅为工频,故对串联器件的开关一致性和静态、动态均压性能的要求有所降低,制造难度也降低。

图2 HA-MMC 相单元运行模式Fig.2 Operation modes of HA-MMC phase unit
定义Sa为a 相单元的运行模式开关函数,其表达式为:
通过控制子模块的投切,复用桥臂可等效为电压源。图3 给出了a 相单元等效电路,其中复用桥臂电压uam和电流iam可分别表示为:
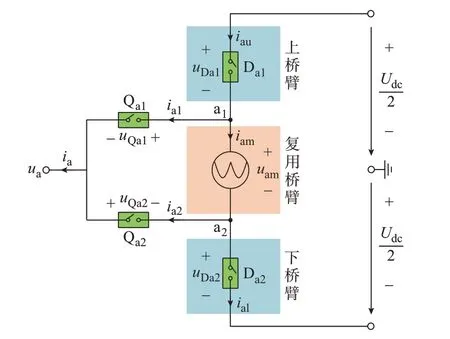
图3 HA-MMC 相单元等效电路Fig.3 Equivalent circuit of HA-MMC phase unit
式中:ia为a 相输出电流。
此外,导通开关两端电压uDa1、uDa2和切换开关两端电压uQa1、uQa2可分别表示为:
2.2 能量平衡条件
子模块电容是交直流功率变换的媒介,其能量均衡是MMC、AAMC 等模块化多电平类柔性直流换流器稳定工作的基础。对于HA-MMC,子模块集中在复用桥臂。因此,复用桥臂在一个周期内吸收与释放的能量应相等。
假设交流侧输出电压和电流不含任何谐波,定义a 相电压和电流的表达式为:
式中:Um、Im分别为相电压和电流幅值;ω为角频率;φ为功率因数角。
将式(6)代入式(3),可得uam和iam在一个周期内的表达式为:
式中:m=Um/(Udc/2)为电压调制比。
不考虑功率因数cosφ恒为0 的情况,由式(8)可知,HA-MMC 需要工作于过调制状态,且调制比为4/π,这与AAMC 一致。
根据式(4)—式(6)及m=4/π,a 相单元导通开关和切换开关的耐压情况如附录A 图A1 所示。导通开关最大承受电压为(1+4/π)Udc/2。因此,需要(1/2+2/π)N个耐压为Ucn的IGBT 单元串联构成,其中,Ucn=Udc/N为子模块电容电压额定值。切换开关承受双向电压,且正、负向电压最大值分别为Udc/2、(4/π-1)Udc/2。因此,需要串联N/2 个耐压为Ucn的IGBT 单元来承受正向电压,串联(2/π-1/2)N个耐压为Ucn的IGBT 单元来承受负向电压。为确保安全和经济性,本文采用N/2 个耐压为Ucn的双向开关串联构成切换开关,如图1 所示,该切换开关的正、负向最大耐压能力均为Udc/2。
2.3 调制原理
将m=4/π 代入式(7),可得HA-MMC 的a 相单元复用桥臂参考电压,如图4 所示。2 种运行模式在相电压参考波过零点进行切换最大值为Udc/2,因此,需要N/2 个电容电压额定值为Ucn的子模块级联构成复用桥臂。以N=6 为例,图4 给出了最近电平逼近调制(NLM)应用于HA-MMC 的调制原理。由图4 可知,复用桥臂根据参考波输出阶梯波uam,进而形成逼近相电压参考波的等效阶梯波ua。由于相单元工作在过调制状态,复用桥臂需要输出负电压以支撑相电压的过调制输出,导致相电压的电平数大于N+1。在本例中,uam、ua的电平数分别为5 和9。

图4 NLM 应用于HA-MMC 的调制原理Fig.4 Modulation principle of NLM for HA-MMC
为了尽量减小子模块电容电压偏差,本文设置子模块的状态为正投入、负投入和旁路,处于相应状态的子模块数分别为Nam+、Nam-和Nam0。在NLM下,复用桥臂的输出电平Nam与Nam+、Nam-和Nam0之间的关系可表示为[16]:
式中:round(·)和mod(·)分别为取整函数和求余函数。
为了降低开关损耗,子模块的状态仅在输出电平变化时改变,具体状态由电流方向和排序结果确定。以图3 所示电流方向为正方向,当复用桥臂电流为正时,正投入升序序列前Nam+个子模块以使其充电,负投入升序序列后Nam-个子模块以使其放电;当复用桥臂电流为负时,负投入升序序列前Nam-个子模块以使其充电,正投入升序序列后Nam+个子模块以使其放电。
3 HA-MMC 的宽范围调压控制方法
受限于能量平衡条件,HA-MMC 的电压调制比只能为4/π,需要采用FBSM 以满足过调制要求。阀侧电压虽可通过变压器变比进行调节,但在实际中很难调节至理想值,且FBSM 的器件成本和运行损耗较大。为此,本文采用移相切换策略来拓宽HA-MMC 的调压范围,并提出了基于HBSM 的HA-MMC 拓扑,这里称之为半桥型HA-MMC。
3.1 移相切换策略
由2.1 节可知,HA-MMC 的相单元在相电压参考波过零点切换运行模式。通过引入移相角θ,移相切换策略使相单元的运行模式切换点滞后于参考波过零点θ角度。以a 相为例,图5 给出了移相切换的基本原理,其中,Sa在一个周期内的表达式为:
通过应用人机工程原理,城南污水厂工程安全防范控制措施更加注重人性化,提高了施工作业人员的安全和舒适感,施工安全和进度等都得到了有效保障。

图5 移相切换策略原理Fig.5 Principle of phase shift switching strategy
将式(6)和式(10)代入式(3),可得:
根据式(11),可得复用桥臂在一个周期内积累的能量为:
令ΔEam=0,可得m、θ和φ之间的关系为:
移相角θ作为新的控制自由度,可使复用桥臂在不同功率因数角φ和电压调制比m下实现能量平衡。由于φ∈[-π,π],为使θ始终存在实数解,根据式(13)可知m的取值范围为[0,4/π]。在同一工况下,存在2 个能够满足能量平衡要求的移相角,即
当|θ|大于π/2 时,复用桥臂电压的最大值uam,max仅与m有关,且最大可达(1+4/π)Udc/2。uam,max越大,复用桥臂所需子模块数量越多。为了尽量降低因采用移相切换而增加的器件成本,本文只考虑式(14)所给移相角中绝对值较小的移相角,即
由式(15)可知,θ是关于φ以π 为周期的函数。以φ∈[0,π]为例,θ随φ和m的变化情况见附录A 图A2。当m保持不变时,θ随φ在[0,π]上单调递增;当φ∈[0,π/2]时,θ随m在[0,4/π]上单调递增;当φ∈(π/2,π]时,θ随m在[0,4/π]上单调递减。θ在m=0、φ=0 时取得最小值-π/2,在m=0、φ=π时取得最大值π/2,总体取值范围为[-π/2,π/2]。
根据式(11)及θ∈[-π/2,π/2],可得复用桥臂电压最大值uam,max的表达式为:
由式(15)、式(16)可得uam,max随φ和m的变化情况,如图6 所示。当m=0.9、φ=0 或π 时,uam,max取得最大值0.82Udc。因此,复用桥臂需要0.82N个电容电压额定值为Ucn的子模块级联构成。
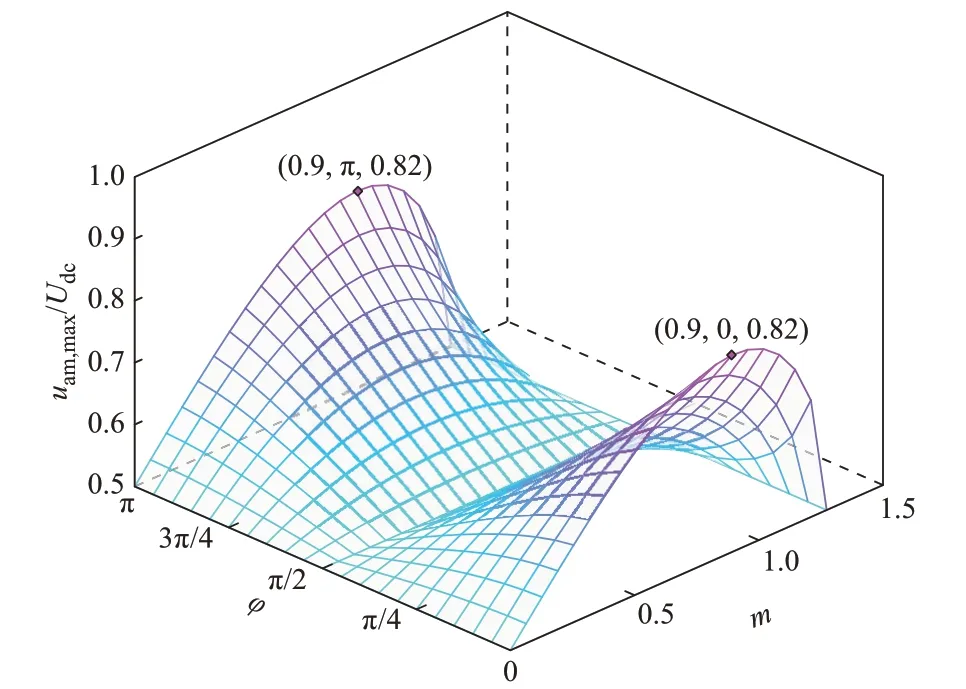
图6 复用桥臂最大电压随功率因数角和调制比的变化Fig.6 Variation of the maximal multiplexed arm voltage with power factor angle and modulation ratio
采用移相切换策略后,HA-MMC 的调制比取值由4/π 变为[0,4/π],极大地拓宽了阀侧电压或直流电压的调节范围。然而,与调制比固定为4/π 的HA-MMC 相比,采用移相切换策略的HA-MMC 每相单元需配置0.82N个子模块,电容数增加了0.32N,轻型化程度有所降低。
3.2 半桥型HA-MMC 拓扑结构
与HBSM 相比,FBSM 的开关器件数量增加一倍,器件成本和运行损耗显著提高。采用移相切换策略后,HA-MMC 不必工作于过调制状态,因此可不使用FBSM。将调制比m的范围限定至[0,1],本文提出了一种基于HBSM 的半桥型HA-MMC,如图7 所示。由3.1 节可知,若要满足运行条件m∈[0,1]、φ∈[-π,π],半桥型HA-MMC 的复用桥臂需要配置0.82N个HBSM。由于复用桥臂不再输出负压,切换开关具备单向承压能力即可。
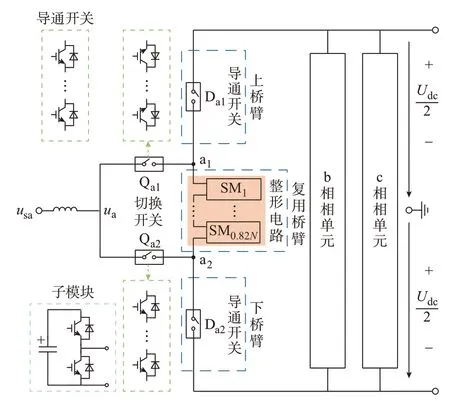
图7 三相半桥型HA-MMC 的拓扑结构Fig.7 Topology of three-phase HA-MMC with HBSMs
在移相切换策略的控制下,以θ∈[0,π/2]为例,半桥型HA-MMC 的a 相单元相关电压参考波形见附录A 图A3。切换开关只承受正向电压,其最大承压与复用桥臂电压的最大值相同,均为(1+msinθ)Udc/2,根据3.1 节可知该值最大为0.82Udc。因此,切换开关需要0.82N个耐压为Ucn的IGBT单元串联构成。导通开关的最大承受电压为(1+m)Udc/2,该值在m=1 时取得最大值Udc,因此,导通开关需要N个耐压为Ucn的IGBT 单元串联构成。
半桥型HA-MMC 的复用桥臂电压恒为正值,且复用桥臂电流在2 种运行模式下均有正有负。半桥型HA-MMC 在采用NLM 时,可直接套用MMC的电容电压均衡方法,即根据桥臂电流极性和电容电压排序结果确定子模块的投切状态。在同一系统参数下,半桥型HA-MMC 与MMC 输出的交流电压电平数相同且最大为N+1。
4 经济性分析
4.1 器件成本
在各种多电平拓扑所采用的开关器件耐压、子模块电容额定电压相同的前提下,表1 给出了同一直流侧电压下,本文所提HA-MMC 拓扑与MMC、AM-MMC 以及AAMC 拓扑的性能对比。基于是否具备直流故障穿越能力,表1 列举了所对比多种MMC 方案的2 种形式,即不具备直流故障穿越能力,但器件用量少、成本低的经济型拓扑,为Ⅰ类换流器;而Ⅱ类换流器则对应为该拓扑具备直流故障穿越能力的形式。
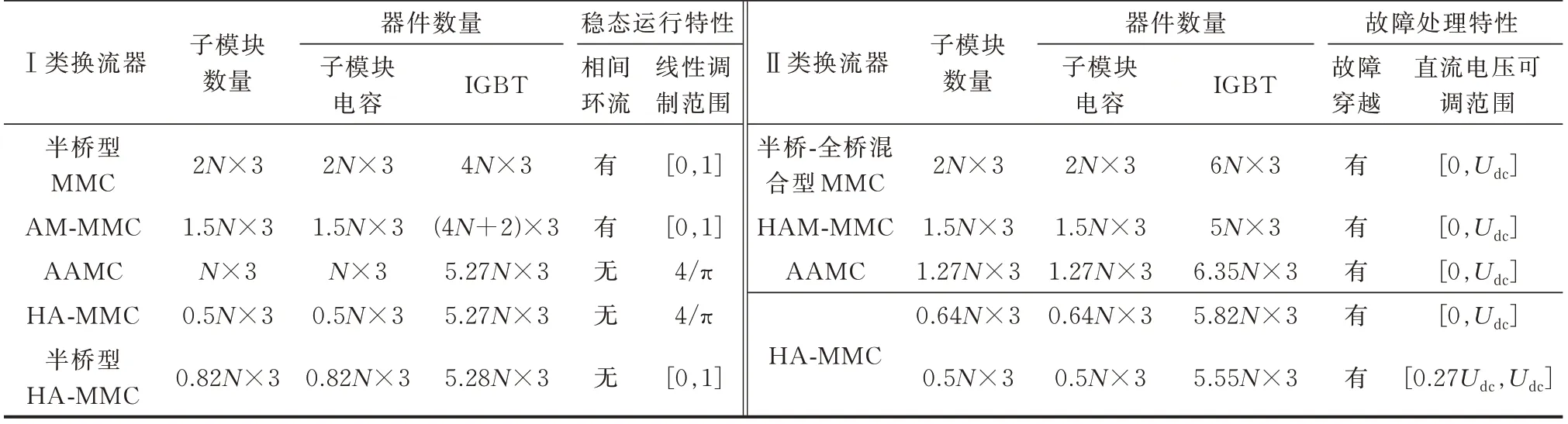
表1 HA-MMC 与典型多电平拓扑性能对比Table 1 Performance comparison of HA-MMC and typical multilevel topologies
对于具备较少功率器件的经济型Ⅰ类换流器,MMC、AM-MMC 和半桥型HA-MMC 的子模块采用HBSM;AAMC 和HA-MMC 由于其运行特性,子模块采用FBSM。由表1 可知,HA-MMC 和半桥型HA-MMC 的电容数量最少,在节约电容投资的同时有效降低了换流器的体积和重量。然而,导通开关和切换开关的引入使得2 种HA-MMC 的开关器件数量增加。与MMC 相比,HA-MMC 和半桥型HA-MMC 可分别减少75%和59%的电容使用量,但也增加了32%的IGBT 使用量。在子模块中,电容体积和重量可达50%以上[4-5],所提2 种新型拓扑可显著提升换流阀轻量化程度。
此外,与AAMC 类似,HA-MMC 和半桥型HAMMC 交替运行于上、下桥臂导通复用模式,不存在相间环流,故无须如常规MMC 以及AM-MMC 在换流器内部配置桥臂电感(6 个);由于各相单元的上、下桥臂以工频交替导通,直流侧电流含有显著的6 倍频谐波成分,AAMC 以及2 种HA-MMC 需要在直流出口串联滤波电感,并加装并联电容器以起到滤波作用和电压支撑作用。受限于桥臂能量均衡条件,HA-MMC 以及AAMC 拓扑仅能在电压调制比为4/π 的单工作点稳定运行;通过采用移项切换策略,所提半桥型HA-MMC 拓扑可将线性调制比拓宽至m=[0,1],这与半桥型MMC 以及AM-MMC拓扑运行范围一致。
对于具备直流故障穿越能力的Ⅱ类换流器,半桥-全桥混合型MMC[17-18]的FBSM 装配比例为50%,HAM-MMC 采用FHF 型[19],这2 种换流器的直流电压可调范围均为[0,Udc];而对于原本即采用FBSM 的AAMC 和HA-MMC,每相需分别增加0.27N和0.14N的子模块数量来提供足够的反电动势以可靠阻断交流馈流通路,其直流电压可调范围亦为[0,Udc]。另外,所提HA-MMC 拓扑还可通过切换开关中反向串联二极管本身的反向截止特性阻断故障电流通路,此时仅需增加切换开关中级联的双向开关数量至0.64N便可实现直流故障电流阻断,然而受限于复用桥臂中子模块数量,其直流调压范围为[0.27Udc,Udc]。由表1 可知,HA-MMC 的2 种具备直流故障阻断能力的拓扑形式所采用子模块电容数量最少,且其IGBT 使用量多的劣势降低,在有效降低换流器的体积和重量的同时,为实现直流故障穿越而带来的附加投资也可大大降低。
4.2 运行损耗
运行损耗是评估换流器经济性和运行效率的重要指标。对于柔性直流换流器,运行损耗主要为IGBT 和二极管的通态损耗与开关损耗,详细计算方法可参考文献[20-21]。 基于MATLAB/Simulink 仿真平台,本文分别搭建了MMC、AMMMC、AAMC 和所提HA-MMC 的运行损耗仿真计算模型,调制策略均采用NLM,并设定直流母线电压为20 kV、换流器容量为1.5 MV·A、功率因数为0.95。其中,基于FBSM 的AAMC 和HA-MMC 工作于调制比为4/π 的过调制状态,并采用2.3 节所述子模块电容电压均衡方法;基于HBSM 的MMC、AM-MMC 和半桥型HA-MMC 的调制比为0.9,采用传统的电容电压均衡方法。所得各换流器的运行损耗如表2 所示。
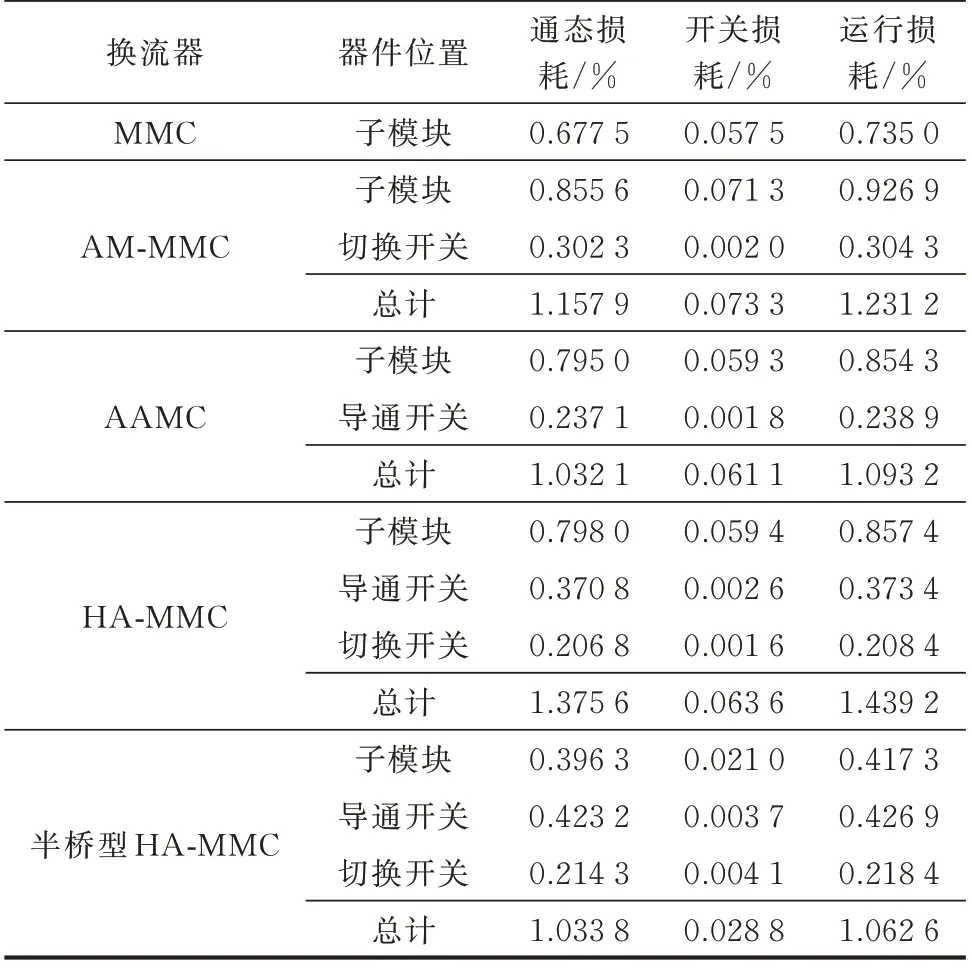
表2 HA-MMC 与典型模块化多电平拓扑运行损耗Table 2 Operation loss of HA-MMC and typical modular multilevel topologies
对于本文所提出的HA-MMC 和半桥型HAMMC 拓扑,开关电路的引入将会导致额外的运行损耗。由于通断频率仅为50 Hz,导通开关和切换开关的开关损耗约为其产生的通态损耗的1%,占比较小。与AAMC 相比,HA-MMC 的子模块数量减少一半,但子模块被全周期利用,其运行损耗并未降低;由于引入切换开关且导通开关的器件数量增加,HA-MMC 开关的运行损耗增加。在相同直流电压和传输功率下,调制比越大,交流电压越大、交流电流越小,但由于采用不同的电容电压均衡方法且HA-MMC 使用FBSM,调制比较小且子模块数较多的半桥型HA-MMC 仍然获得了较小的子模块运行损耗,其总体运行损耗与AAMC 相近。与MMC 相比,半桥型HA-MMC 的子模块数量降低且具有较小的子模块运行损耗,但导通开关和切换开关的通态损耗使得其总体运行损耗有所增加。
本文所提HA-MMC 拓扑可显著实现轻型化目标,并且具备建造成本优势,虽然运行损耗大于常规MMC,但仍具有较高的运行效率,对于远海风电经柔性直流送出等轻型化要求严格的应用场合具有良好的推广前景。此外,针对子模块故障和开关故障问题,HA-MMC 仍可通过冗余设计保证自身的运行可靠性。
5 仿真验证
为了验证所提HA-MMC 拓扑的可行性及其控制策略的有效性,本文利用MATLAB/Simulink 分别搭建了调制比为4/π 的HA-MMC 仿真模型和采用移相切换策略的半桥型HA-MMC 仿真模型,并搭建AAMC 和MMC 仿真模型作为对比。所有换流器均采用NLM,其中基于FBSM 的HA-MMC 和AAMC 采用2.3 节所述电容电压均衡方法,基于HBSM 的半桥型HA-MMC 和MMC 采用传统电容电压均衡方法。MMC 每桥臂包含N=20 个子模块,具体仿真参数见表3。
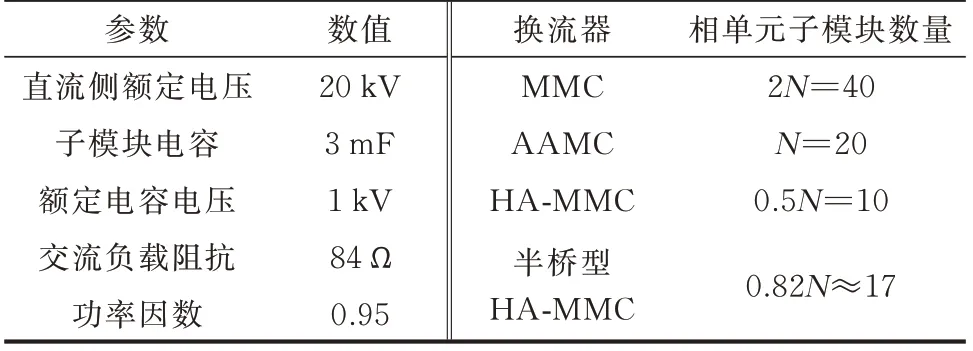
表3 仿真系统参数和配置Table 3 Parameters and configuration of simulation system
5.1 调制比为4/π 的HA-MMC
在不施加改进控制策略时,受限于能量平衡条件,HA-MMC 只能工作于调制比为4/π 的过调制状态,并采用FBSM 以满足过调制要求。图8 给出了HA-MMC 和AAMC 的仿真对比结果。
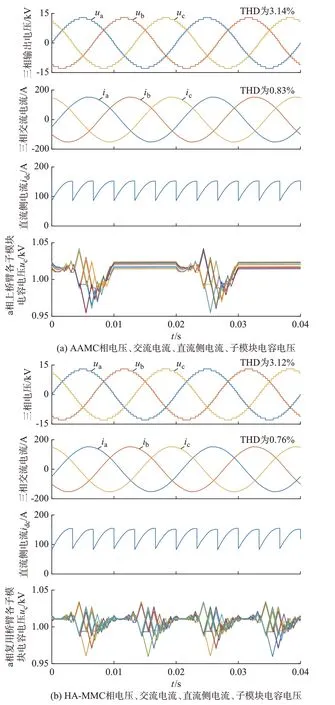
图8 HA-MMC 与AAMC 运行特性对比Fig.8 Comparison of operation characteristic between HA-MMC and AAMC
在NLM 下,HA-MMC 输出了27 电平相电压阶梯波,交流输出电压和电流的总谐波畸变率(THD)与AAMC 相近。HA-MMC 每相上、下桥臂以工频交替导通,直流侧电流呈现六脉动特性,需要装设直流滤波器进行滤波,这与AAMC 一致。AAMC 的上桥臂子模块仅在上桥臂导通时参与形成相电压阶梯波,在下桥臂导通时被切除;通过切换开关和导通开关的配合,HA-MMC 的复用桥臂子模块始终参与形成相电压阶梯波,其电容电压在额定值1 kV 附近呈现2 倍频波动特性,且波动幅度小于5%。由于采用了相同的电容电压均衡方法,HA-MMC 子模块电容电压的波动过程与AAMC 相似。由图8 可知,在节省一半子模块的前提下,HA-MMC 具有与AAMC 近乎一致的外部输出特性。
5.2 采用移相切换策略的半桥型HA-MMC
采用移相切换策略后,HA-MMC 的调制比范围被拓宽至[0,4/π],进一步限定调制比范围至[0,1],HA-MMC 不再工作于过调制状态,进而衍生出半桥型HA-MMC。图9 给出了半桥型HA-MMC和基于HBSM 的MMC 的仿真对比结果,这里调制比设定为0.9。

图9 半桥型HA-MMC 与MMC 运行特性对比Fig.9 Comparison of operation characteristic between HA-MMC with HBSMs and MMC
在NLM 下,半桥型HA-MMC 输出了19 电平相电压阶梯波,THD 与MMC 相近。表4 给出了恒定功率因数(cosφ=0.95)、不同调制比下半桥型HA-MMC 和MMC 的输出相电压情况,进一步验证了半桥型HA-MMC 采用移相切换策略后的宽范围调压能力。

表4 不同电压调制比下半桥型HA-MMC 与MMC 的输出相电压对比Table 4 Comparison of output phase voltage between HA-MMC with HBSMs and MMC when voltage modulation ratios are different
由图9 可知,在相同容值和电容电压均衡方法下,半桥型HA-MMC 具有较低的子模块电容电压纹波,其电容电压峰-峰值为42.8 V,明显小于MMC的61.9 V。因此,在子模块使用量减少59%的前提下,采用移相切换策略的半桥型HA-MMC 可具备与MMC 相近的交流电压输出能力,且对子模块容值大小的要求更低。
本文所建仿真模型中的交流负载是感性负载且cosφ=0.95,当m=0.9 时可得移相切换的移相角θ为-29.6°。因此,半桥型HA-MMC 相单元的运行模式切换点将超前于相电压参考波过零点29.6°。图10 给出了半桥型HA-MMC 复用桥臂的电压和电流仿真结果,以及导通开关电压和切换开关电压的仿真结果。由图10(a)可知,上桥臂导通复用模式被“提前”触发,复用桥臂电压和电流仍以2 倍频变化,复用桥臂不再输出负压,其输出电压最大值与移相角θ有关。由图10(b)和(c)可知,Da1和Qa2同时通断,Da2和Qa1同时通断,处于开通状态的开关为电流提供通路,处于关断状态的开关承受电压。Qa1和Qa2在关断时承受复用桥臂电压,如图10(c)所示,所承受电压不会出现负值,故切换开关具备单向承压能力即可。
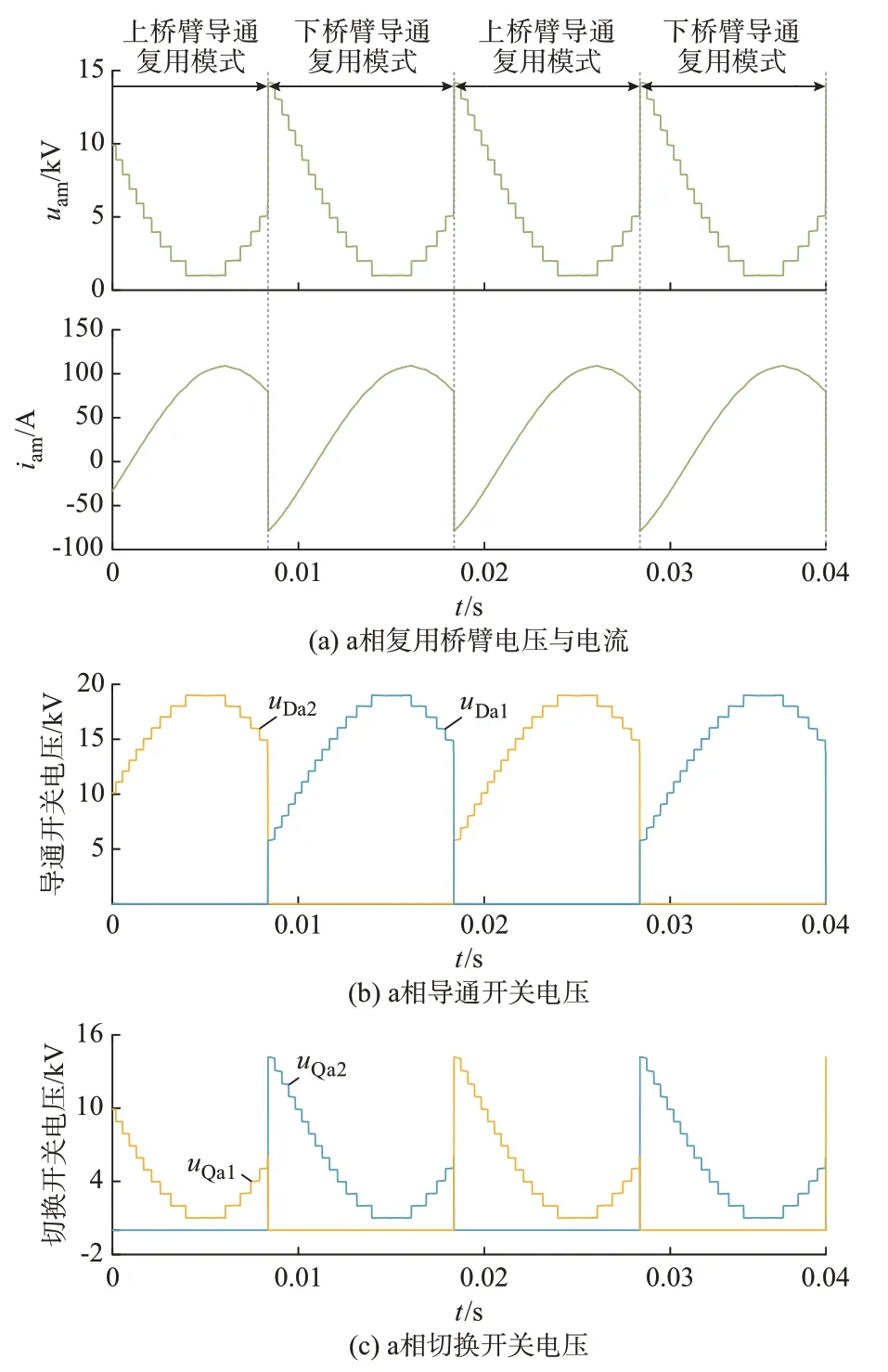
图10 半桥型HA-MMC 复用桥臂与开关的仿真结果Fig.10 Simulation results of multiplexed arm and switches of HA-MMC with HBSMs
6 结语
本文提出了一种轻型化模块化多电平拓扑即HA-MMC,介绍了其工作原理,采用了移相切换策略以实现宽调制比范围下的能量平衡,并分析了器件成本和运行损耗,最后,搭建仿真模型对所提拓扑及其控制策略进行了验证,得出如下结论:
1)通过引入导通开关和切换开关,HA-MMC实现了对复用桥臂整形电路的全周期利用,与常规MMC 相比,子模块数量即电容数量可减少75%,显著实现了轻型化目标。
2)移相切换策略将HA-MMC 的调制比范围拓宽至[0,4/π],进而提出半桥型HA-MMC。与常规MMC 相比,半桥型HA-MMC 的子模块数量减少59%。采用移相切换策略使半桥型HA-MMC 拓扑的复用桥臂所需输出电压最大值增加,致使子模块数量增加,使所提HA-MMC 拓扑的轻型化优势有所弱化。
3)HA-MMC 开关电路通断频率仅为工频,对串联IGBT 器件的开关一致性和静态、动态均压性能的要求有所降低,因而制造难度也降低。
针对本文所提HA-MMC 拓扑及控制策略,以下研究有待进一步开展:HA-MMC 拓扑的直流短路电流阻断能力研究;采用具备高耐压、低通态压降、低成本等特点的IGCT 构成开关电路,HAMMC 拓扑的轻型化研究;基于能量平衡条件并兼顾拓扑轻型化需求,宽范围调压控制方法的研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。