基于Petri网的航空器运行指令筛选方法与推演
2023-09-13汤新民胡钰明陈强超
吴 昊,汤新民,2+,胡钰明,陈强超
(1.南京航空航天大学 民航学院,江苏 南京 211000;2.中国民航大学 交通科学与工程学院,天津 300300;3.中南民航空管通信网络科技有限公司 通信网络中心,广东 广州 510080;4.中国民用航空中南地区空中交通管理局 技术保障中心,广东 广州 510080)
0 引 言
对于机场管制而言,航空器在机场场面的运行状态是基于管制员发出的航空器运行指令进行调整的,而航空器运行指令的误听误报是机场管制及场面滑行中的重要风险,如何避免因指令错误下达而造成的安全隐患亟须解决。目前使用的空管自动化系统中的电子进程单系统,其中包含着包括飞行计划信息、雷达信息、ACRAS 信息等在内的大量的信息[1],可用于准确反映管制员的管制程序,且目前航空器运行指令的获取相对成熟,系统中终端程序可通过数据库进行通讯和同步,包括飞行计划表(tab_fpl)和信息更新表(tab_amend)[2],对于管制进程单指令的分析与推演有助于构建以指令为基础的机场场面活动状态模型,进而提供场面各部分状态信息,从而对场面可能出现的风险状态进行预警。
目前已有较多针对电子进程单以及航空器运行指令推演的研究,许峰[3]基于塔台管制模拟系统提出了基于电子进程单操作触发的风险提示告警机制,利用流程图、类图和序列图的描述方式对管制过程进行了建模;赵文杰等[4]提出电子进程单中管制员指令获取,针对出港航班、进港航班电子进程单的操作流程已相对完备,管制员目前可以采用进程单掌握机场场面航空器的实时态势,从而精准安全地对场面多个航空器进行感知及控制;潘卫军等[5]使用Petri网方法针对繁忙机场的机坪运行过程进行建模,在将场面涉及到滑行道和机坪等活动区域进行离散化的同时,构建机坪全过程运行的基本Petri网模型,但并未涉及电子进程单或管制指令的Petri网建模。总而言之,对航空器运行指令进行推演及风险状态预测的研究相对较少。
本文利用着色Petri网[6]对航空器依据跑道号的指令并行筛选过程、航空器起飞或复飞以及后续指令过程、航空器着陆指令过程及航空器穿越指令过程仿真,并采用CPN Tools层次网工具验证并开发了上述4个过程的模块,这4个过程是基于航空器运行指令的机场场面活动模型中的基础,并以此可组合出多种形式的协同操作过程,可处理多种复合场景。这些模块在过程仿真建模中可作为功能单元直接应用,在简化结构的同时便于系统测试运行。与传统Petri网相比,利用着色Petri网对航空器运行指令进行建模,具有表达能力强、具备时间概念及有可视化和建模能力的优点[7]。
1 管制进程单指令逻辑分析
管制进程单中SurfaceState指航空器的运行状态,同时也是管制员给飞行员的指令,管制进程单指令与其对应的意义见表1。
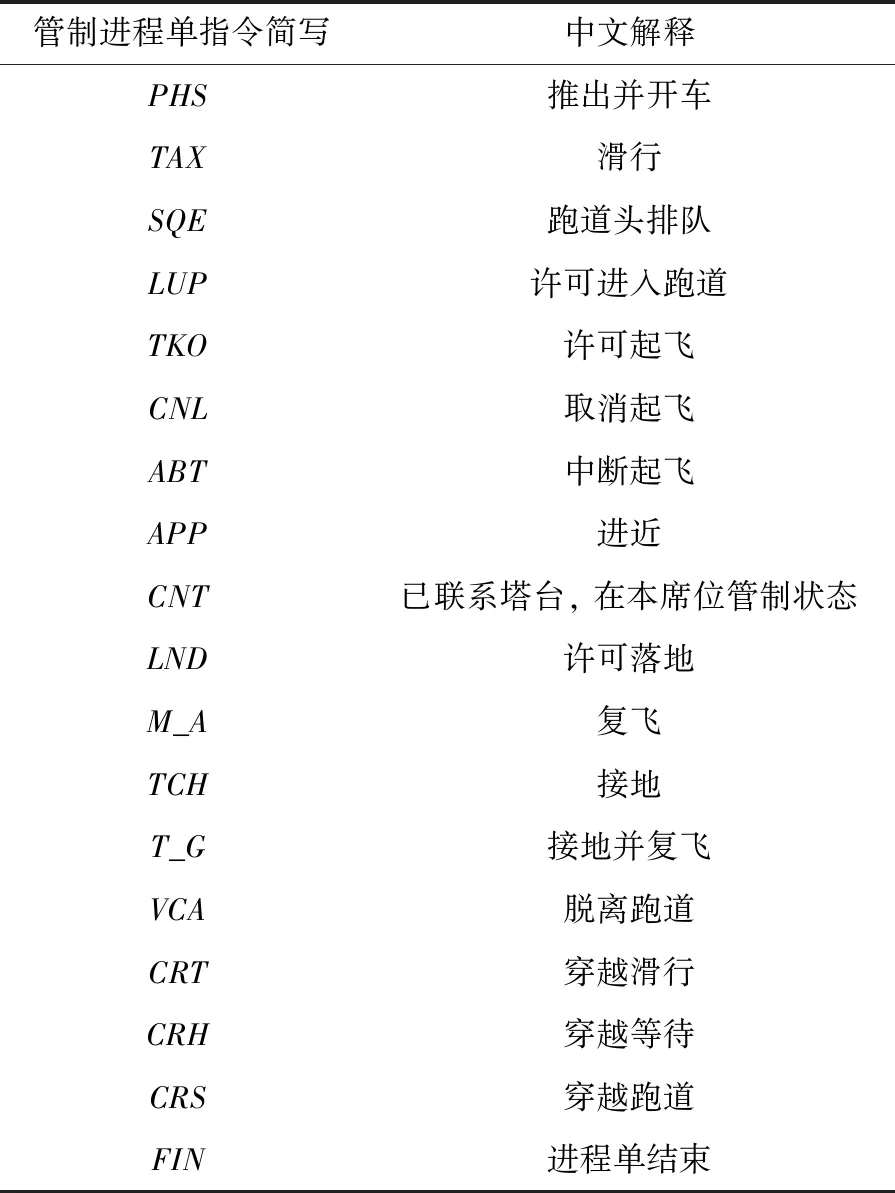
表1 管制进程单指令及中文解释
管制进程单的基本逻辑由航班进离港及滑行穿越移动顺序所决定,可归纳为4种基本逻辑。
第一种是航空器起飞指令逻辑,航空器起飞指令逻辑为首先滑行至跑道头排队或许可进入跑道,然后许可起飞,最后起飞结束离港或因故取消起飞或中断起飞并脱离跑道,所涉及指令包括SQE、LUP、TKO、CNL、ABT、VCA、FIN,如图1所示。
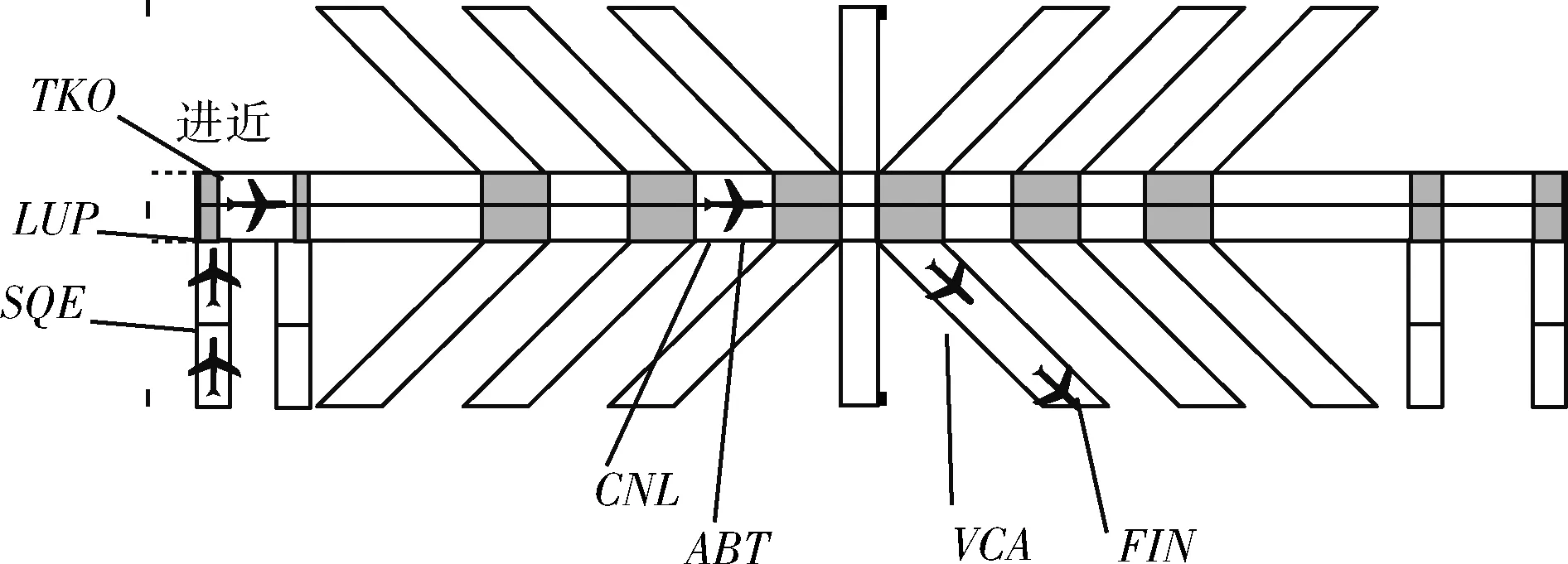
图1 航空器起飞指令逻辑
第二种是航空器复飞指令逻辑为首先进近或联系塔台在席位管制状态,然后航空器接地并复飞或复飞,最后航空器复飞结束,所涉及指令包括APP、CNT、T_G、M_A、FIN,如图2所示。
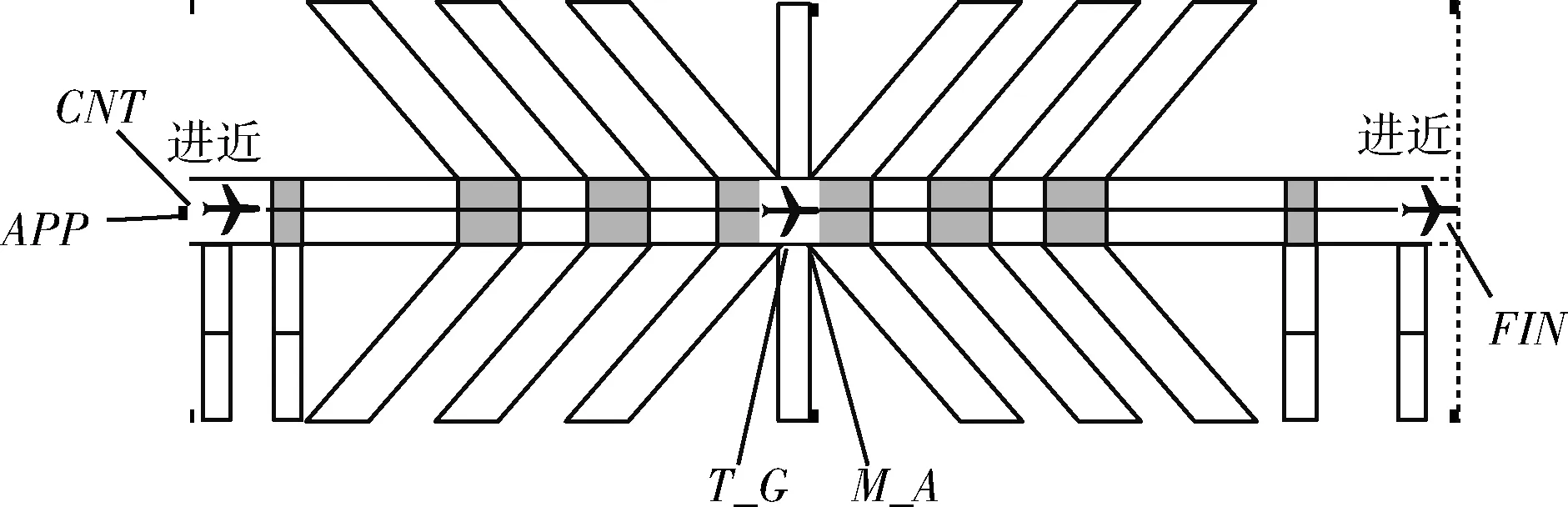
图2 航空器复飞指令逻辑
第三种是航空器进港降落及后续指令逻辑,航空器降落指令首先进近或联系塔台在席位管制状态,然后航空器接地或许可落地,最后航空器降落直至滑行结束,所涉及指令包括APP、CNT、TCH、LND、TAX,如图3所示。
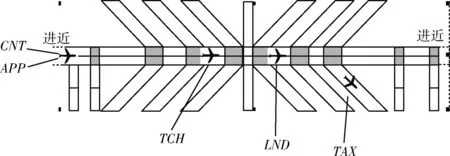
图3 航空器进港降落及后续指令逻辑
第四种是航空器穿越滑行指令逻辑,航空器穿越滑行指令首先穿越等待,然后穿越跑道,最后穿越滑行直至滑出跑道,所涉及指令包括CRH、CRS、CRT,如图4所示。

图4 航空器穿越滑行指令逻辑
为保证航空器在包括起飞、着陆、复飞以及穿越在内的运行安全,通常情况下电子进程单的指令逻辑需要满足以下基本约束:①唯一性约束。每个航班在同一时刻收到的进程单指令是唯一的,指令对航空器具有时间上的独占性,航班对应的航空器收到某指令后,在其收到指令后运行的一段时间内,不可执行其它指令,直到该指令执行结束,航空器才可以接收后续指令。即不允许航空器在同一时刻执行一条以上的指令。②跑道安全缓冲时间约束。对于使用同一跑道起飞、着陆、复飞或穿越的航空器之间应有必要的安全时间间隔;从进程单指令的角度而言,对于涉及占用跑道的指令,两架航空器的指令安全时间间隔是必要的。③机场滑行道、停机位、跑道头等不同空间航空器可占用空间的容量约束。机场不同空间所容纳的航空器数量是不同的,从进程单指令的角度而言,对于涉及进入不同机场空间的指令,需要考虑已进入该空间的航空器数量的限制。
2 基于Petri网的航空器运行指令建模
2.1 单跑道运行全过程基本网
航空器运行指令建模是将航空器运行指令的推演过程与航空器运行Petri网中的一系列变迁的激发进行映射[4]。通过航空器运行过程中的管制电子进程单获取航空器运行指令I, 航空器运行的任一指令为ik且ik∈I, 根据航空器运行Petri网中变迁与库所的关系,自动生成相应的变迁激发序列Tm={tn,tn+1,…}。 将航空器运行指令分为起飞及复飞、着陆和穿越3类,并以此将跑道库所分为跑道起飞区域库所、跑道着陆区域库所及跑道穿越区域库所,建立着色Petri网模型。为了避免管制员在发布指令的过程中引发的错、忘、漏问题,以降低因航空器运行指令错误引起的跑道入侵事件的概率,需要基于航空器运行建立跑道运行模型。在航空器场面运行模型中,利用token来表示场面运动目标,变迁的使能激发代表航空器运行指令的下发,token在相应库所中的逗留时间代表航空器状态的持续时间。
跑道运行全过程时延离散Petri网[8,9]TPN是一个六元组∑=(P,T;F,M,Γ,Q);
P={p1,p2,…,pm} 是一个非空有限库所集,其中库所P为包括跑道、滑行道、停机位及进近区域在内的典型运行单元的时延库所及无时延的指令库所;
T={t1,t2,…,tn} 是一个非空有限变迁集,其中T为所有变迁的集合,表示航空器穿越运行单位边界活动;P∩T=∅;
F⊆(P×T)∪(T×P) 是流关系;


2.2 建模实例
2.2.1 实例1:航空器起飞或复飞以及后续指令
当有航空器准备起飞时,应等待管制员的指令,当接到管制员的许可起飞指令(TKO)时,航空器由跑道头进入跑道,跑道起飞区域处于占用状态;当接到管制员的复飞指令(T_G或M_A)时,航空器由进近到着陆区域进入跑道,跑道起飞区域处于占用状态;后续收到管制取消起飞指令(CNL)或是中断起飞指令(ABT),则航空器依旧在跑道上,保持跑道起飞区域占用状态;出港航班完成起飞状态,当接到管制员进程单结束指令(FIN),解除跑道起飞区域占用状态;当收到脱离跑道指令(VCA),航空器进入滑行区域或停机位区域,解除跑道起飞区域占用状态。航空器起飞或复飞以及后续模型如图5所示。
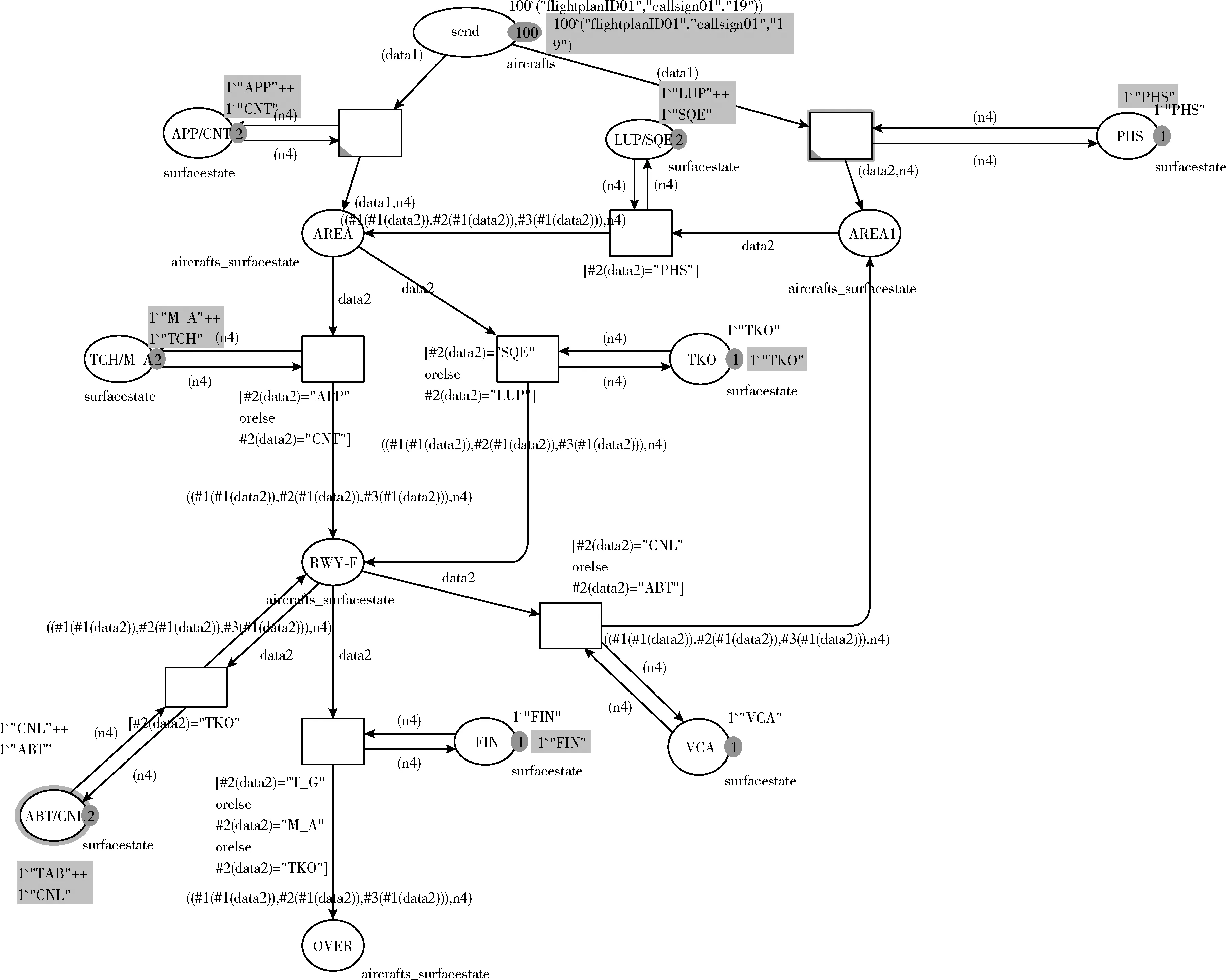
图5 航空器起飞或复飞以及后续模型
图5中库所与变迁映射关系见表2。
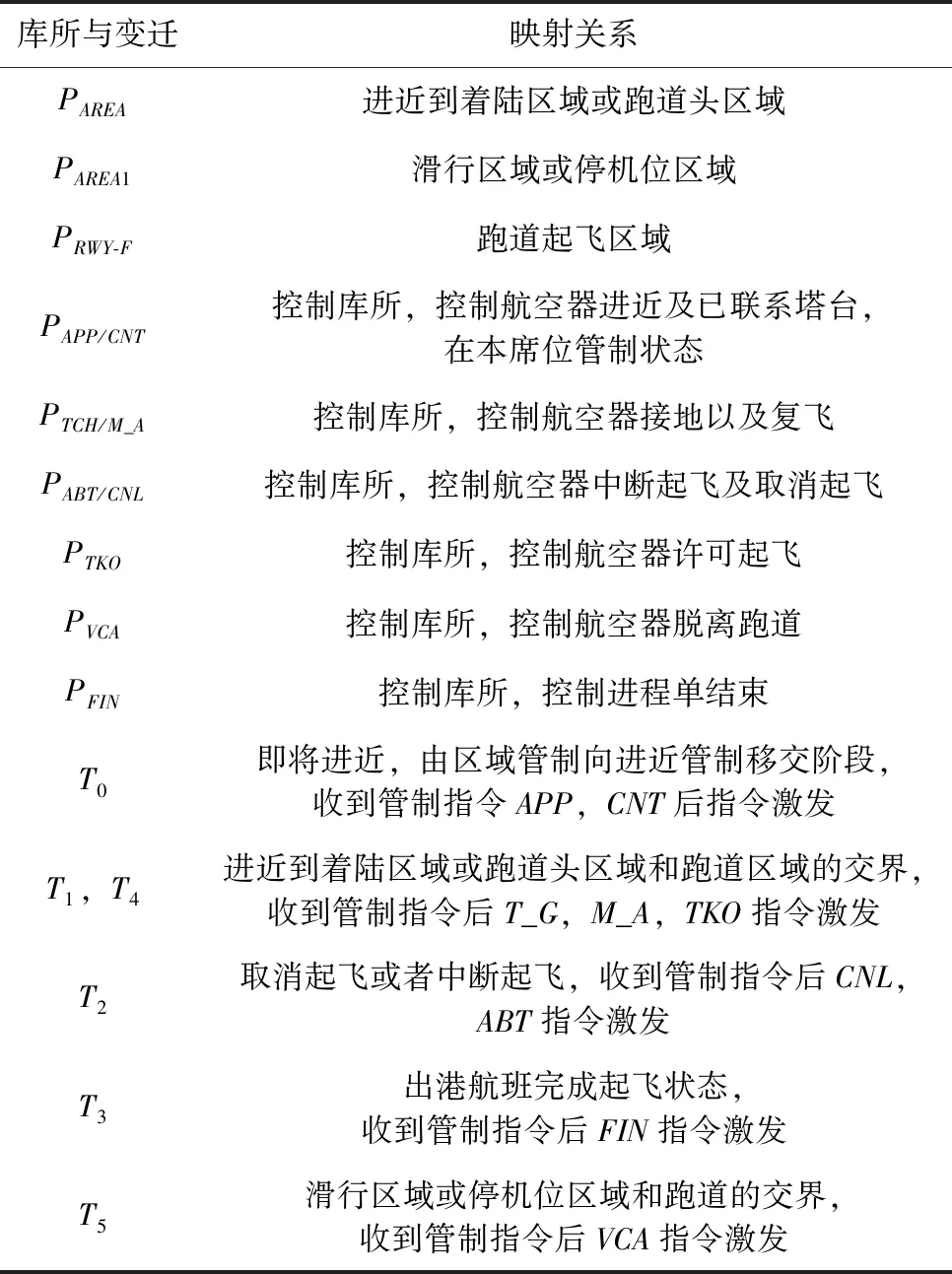
表2 起飞或复飞指令模型映射关系
token表示场面移动目标,变迁T1,T4在AREA与收到相应指令的情况下才使能,此时T1,T4关联T_A或M_A或TKO指令,同理当航空器从跑道脱离滑出,此时T5关联的是VCA指令;当出港航班完成起飞,此时T5关联FIN指令;当航空器取消起飞或者中断起飞,此时T2关联CNL、ABT指令。
2.2.2 实例2:航空器着陆指令
当有航空器着陆时,应等待航空器运行指令发出着陆指令,当接到航空器运行降落指令(LND)、接地指令(TCH)时,航空器将被许可执行下一步动作。建立如图6所示的机场场面航空器着陆模型。
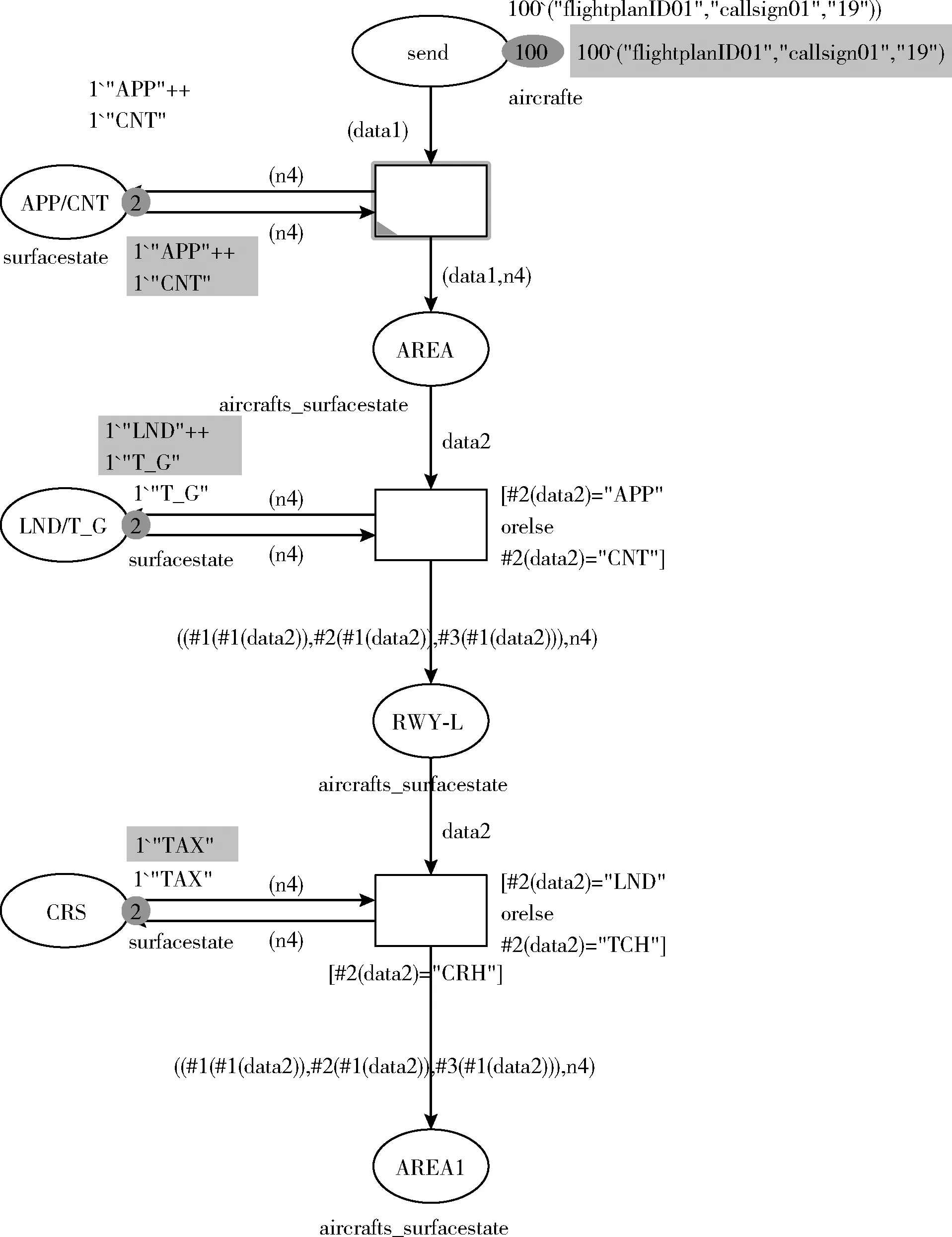
图6 机场航空器着陆模型
图6中库所与变迁映射关系见表3。
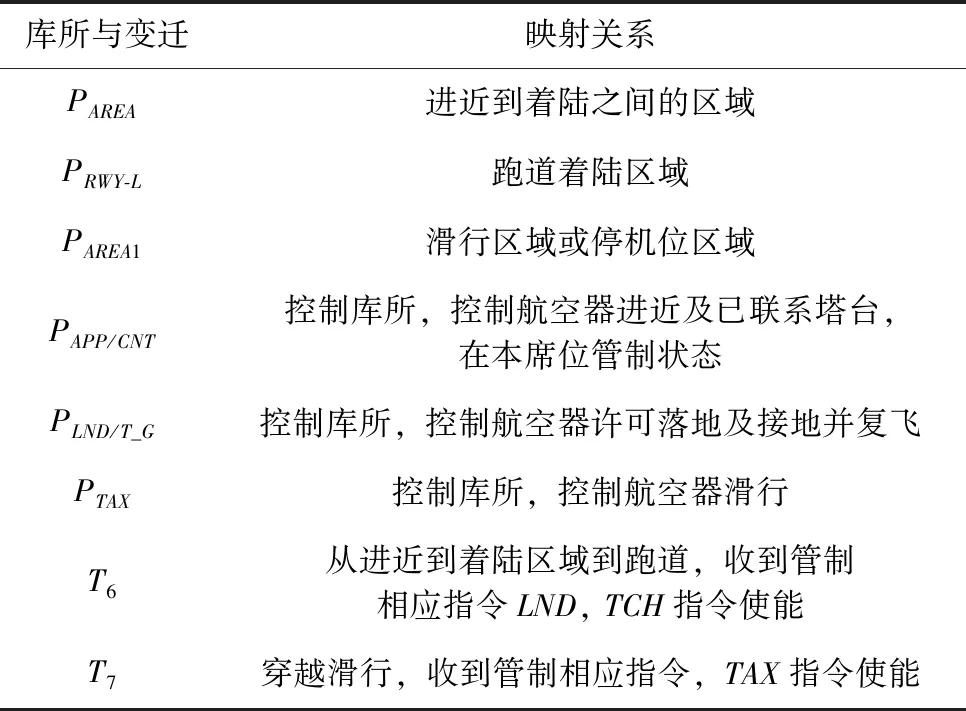
表3 着陆指令模型映射关系
当进近到着陆之间的区域(AREA)内有飞机准备降落,T6的使能需要在AREA和收到航空器运行指令LND或TCH情况下同时使能,此时T6关联LND或TCH指令;当跑道着陆区域(RWY-L)内有飞机准备滑出跑道进入滑行区域或停机位区域(AREA1),T7的使能需要在(RWY-L)和收到航空器运行指令TAX情况下同时使能,此时T7关联TAX指令,由此对于管制员的指令进行预演。
2.2.3 实例3:航空器穿越指令
当有航空器穿越时,应等待管制员的指令,当接到管制员的穿越等待(CRH)指令时,航空器将进入滑行道区域;当接到管制员穿越跑道(CRS)指令后进入跑道的穿越区域;当接到管制员穿越滑行的指令后进入滑行区域或停机位区域。建立如图7所示的机场航空器穿越模型。
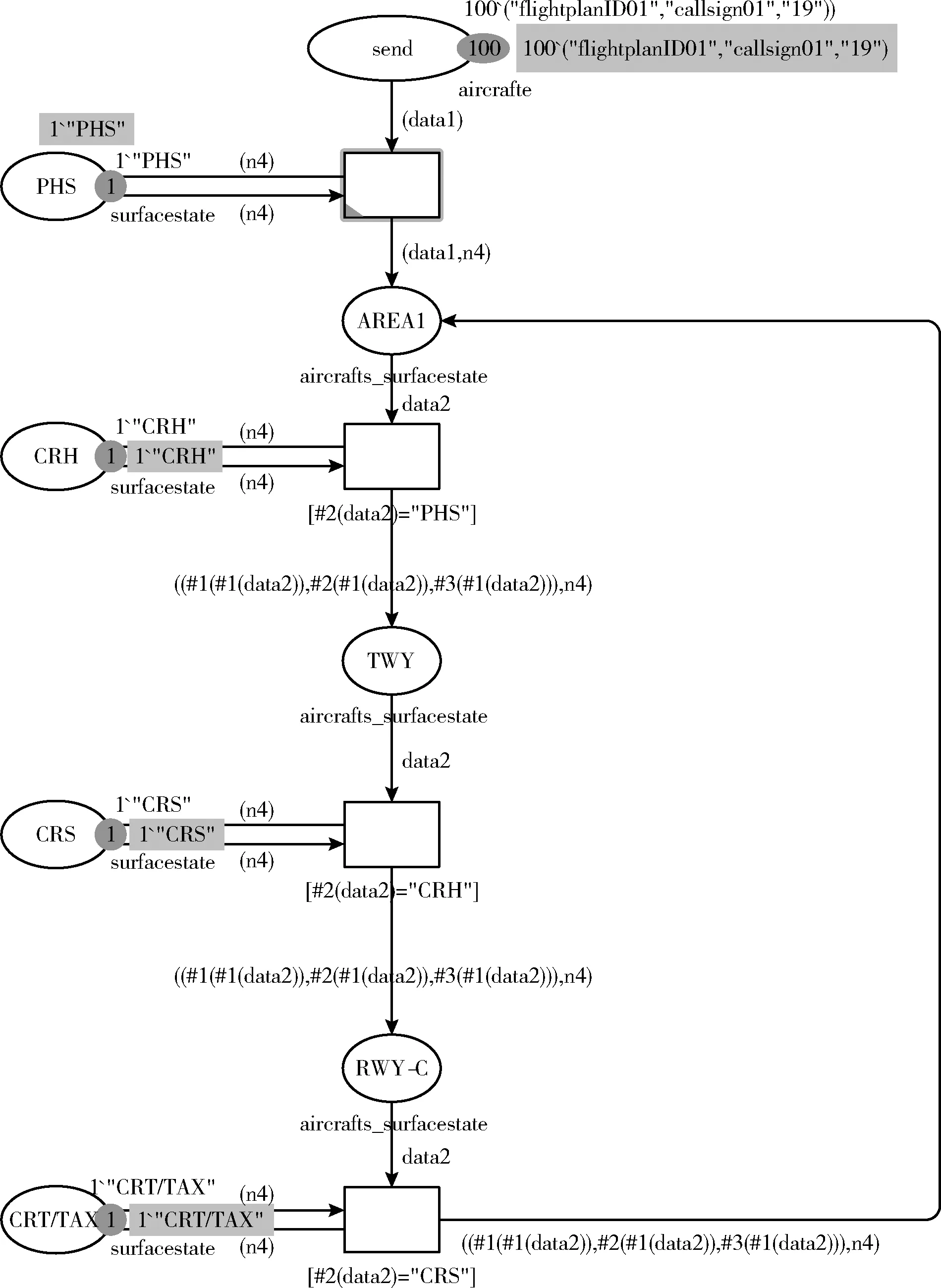
图7 机场航空器穿越模型
图7中库所与变迁映射关系见表4。
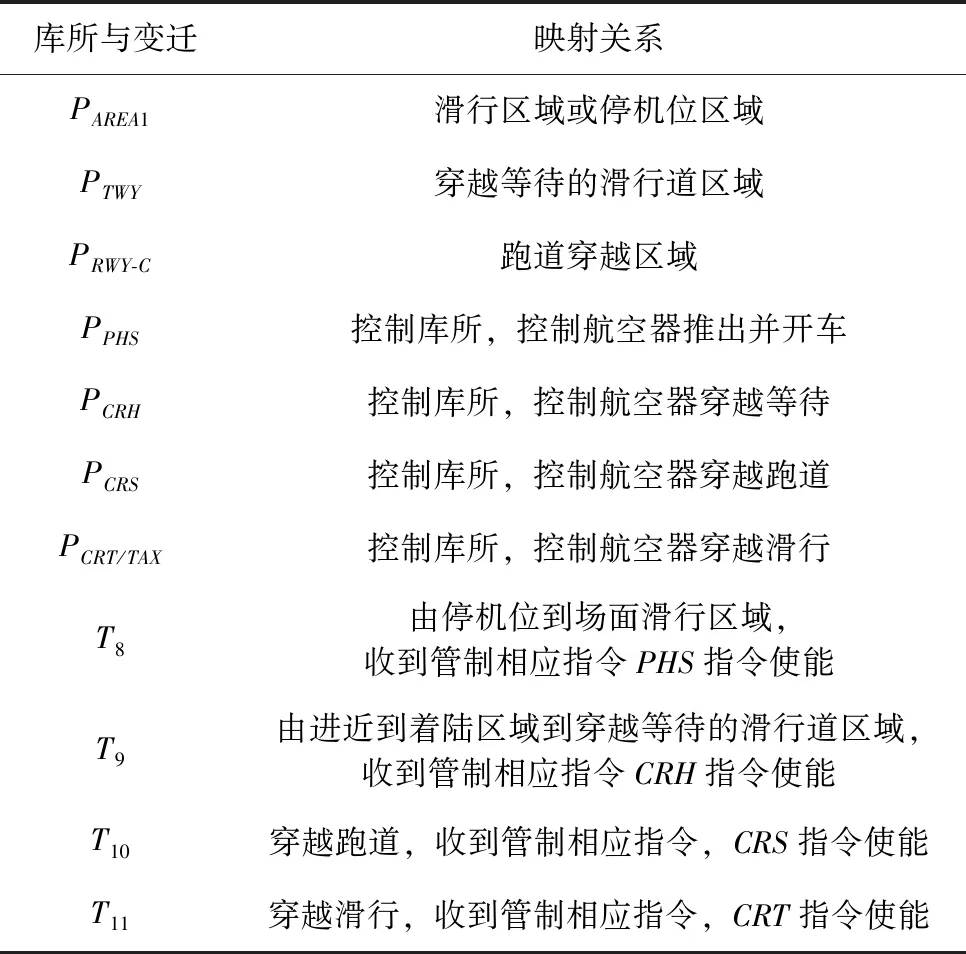
表4 穿越指令模型映射关系
当滑行区域或停机位区域(AREA1)内有飞机穿越等待,变迁CRH的使能需要同时在AREA1存在token和收到航空器运行指令CRH情况下使能,此时变迁CRH关联CRH指令;当待穿越的滑行道(TWY)有飞机穿越跑道,变迁CRS的使能需要同时在TWY存在token和收到航空器运行指令CRS情况下使能;当待跑道穿越区域(RWY-C)有飞机结束穿越跑道,变迁CRT的使能需要同时在RWY-C存在token和收到航空器运行指令CRS情况下使能。
3 基于着色Petri网的机场场面活动筛选模型
基于电子进程单的航空器运行指令的机场场面活动系统是典型的离散事件动态系统,采用着色Petri网对航空器依据跑道号的指令并行筛选过程,航空器起飞或复飞以及后续指令过程,航空器着陆指令过程及航空器穿越指令过程,并依托着色Petri网层次化结构,对上述过程模块整合后的机场可穿越场面活动模型进行整体上的筛选过程模拟。
3.1 航空器多跑道筛选着色Petri网模型
图8为航空器依据跑道号的指令并行筛选过程着色petri网图,其中数据包括航班计划ID号n1、航班呼号n2、跑道号n3、航空器运行状态n4,按照模块化的方式将航空器按照跑道号分类处理。
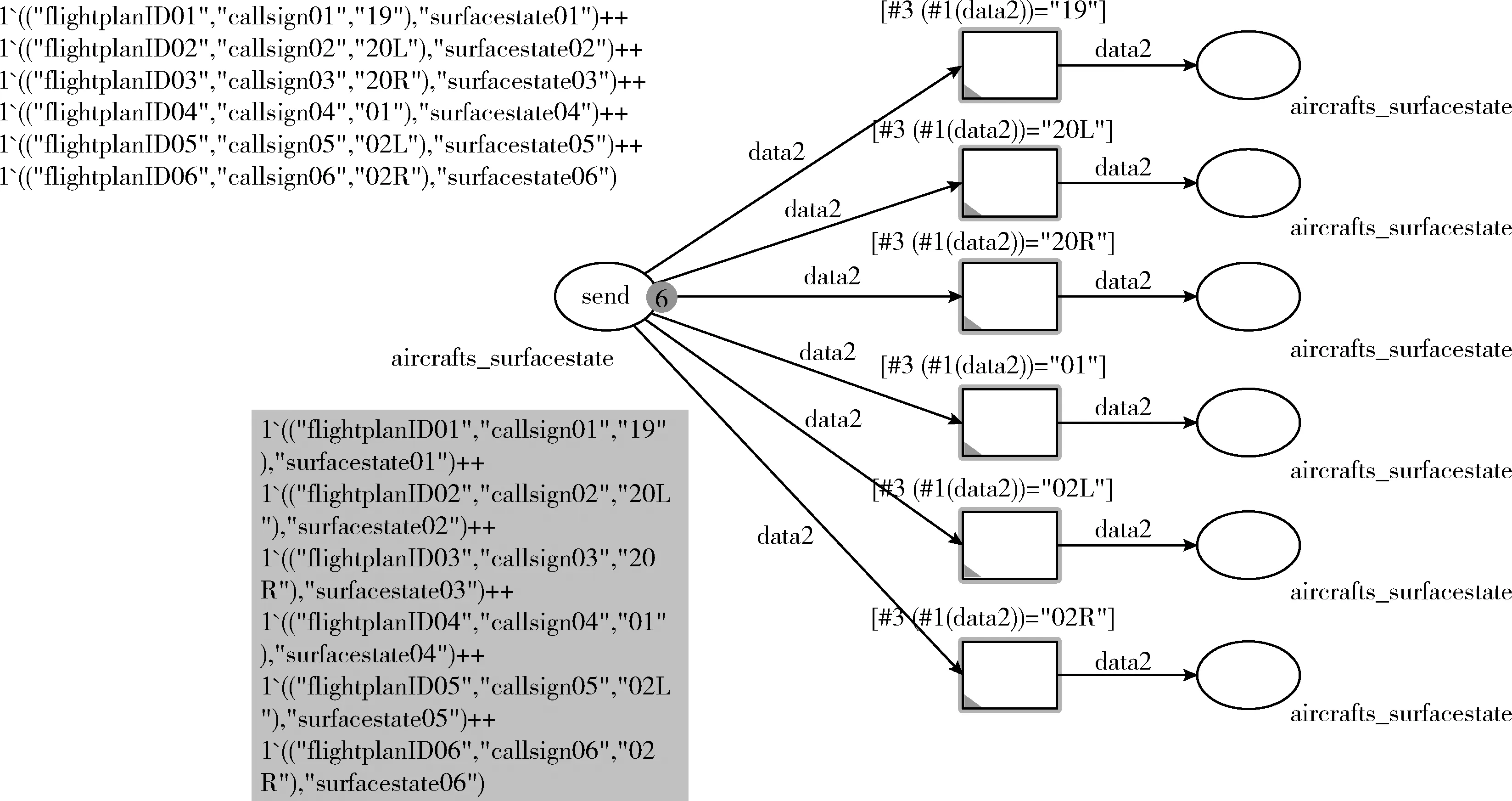
图8 航空器依据跑道号的指令并行筛选过程着色petri网
3.2 航空器多跑道筛选着色Petri网模型参数设置
图9是利用CPN Tools建模过程中部分颜色集、变量集以及函数的定义,本文中涉及的航空器目标属性包括航空器识别号(flightplanID)、航班呼号(callsign)、跑道号(runway),声明航空器目标信息的变量类型为 aircrafts,由3个变量复合而成,其中航空器识别号、航班呼号、跑道号均为字符串类型数据;航空器接收航空器运行指令后,航空器目标信息的变量类型为aircrafts_surfacestate,该变量由aircrafts与航空器场面状态(surfacestate)复合而成,其中航空器场面状态为字符串类型数据;本文中aircrafts与aircrafts_surfacestate均是涉及时间,故颜色集采用的定义方式为
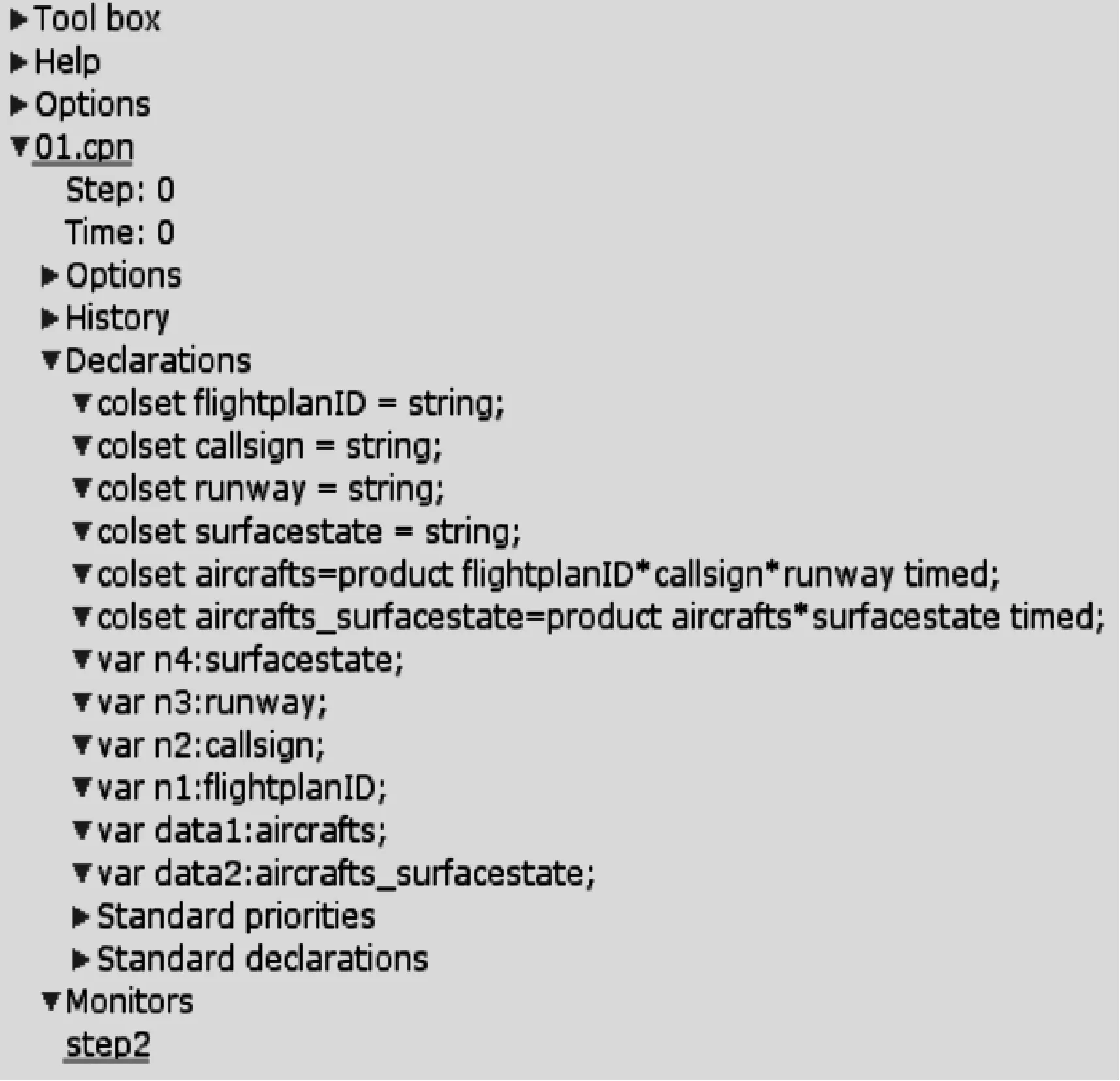
图9 建模过程中部分颜色集、变量集及函数
colsetaircrafts=productflightplanID*
callsign*runwaytimed
colsetaircrafts_surfacestate=productaircrafts*
surfacestatetimed;
3.3 整体机场可穿越着色petri网模型构建
图10为整体机场可穿越模型着色Petri网模型,也是以该机场单跑道为例使用着色Petri网模型建立可穿越场面活动模型,该模型在图5航空器起飞或复飞以及后续指令过程着色petri网图、图6航空器着陆指令过程着色petri网图、图7航空器穿越指令过程着色petri网图基础上构建整体机场可穿越模型着色petri网模型,可对机场整体态势进行感知和多模块下的协同融合操作,同时将所涉及的指令唯一使用,保证了库所和变迁的一一映射关系。
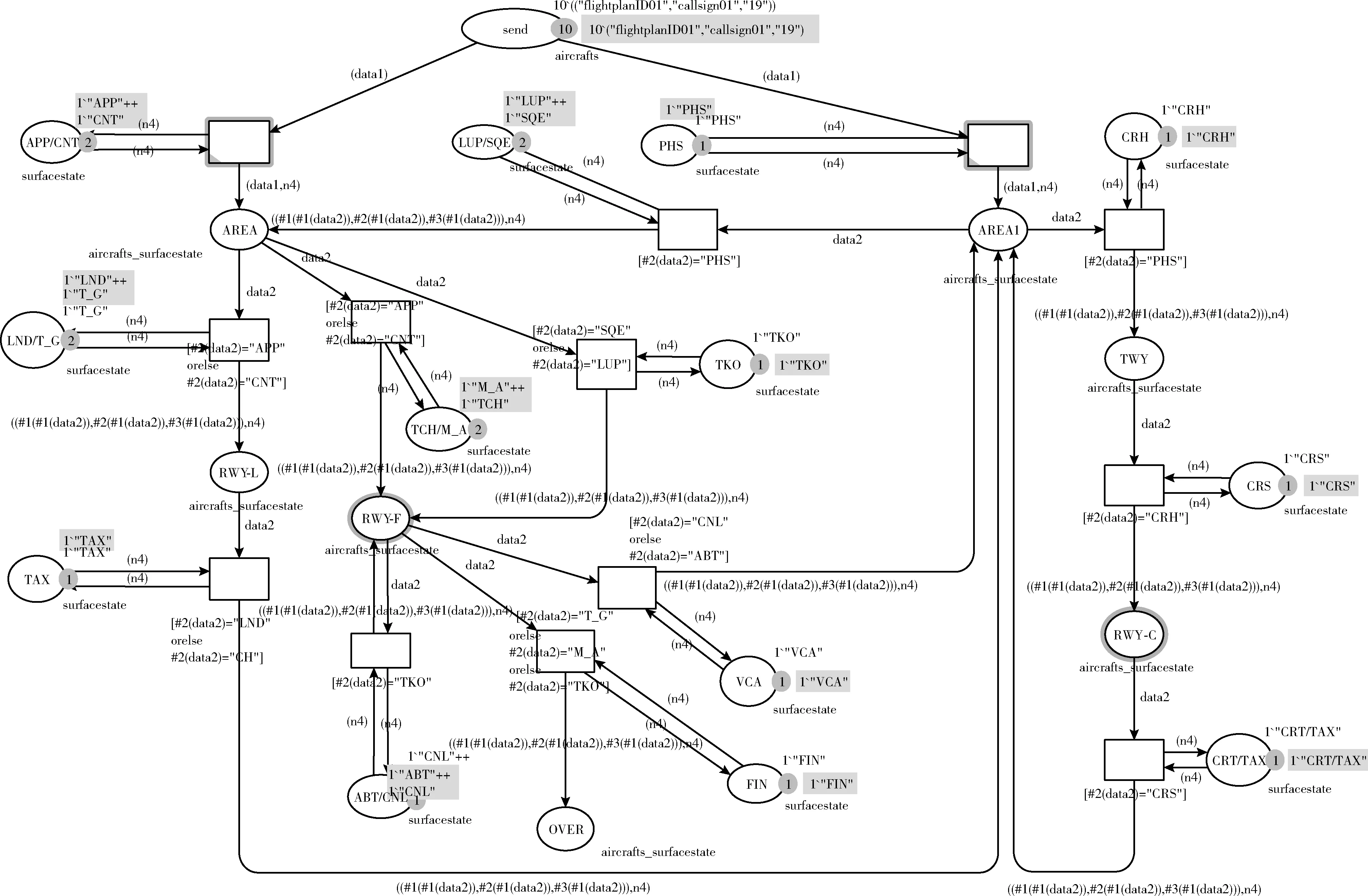
图10 整体机场可穿越模型着色petri网
3.4 航空器运行指令风险预警模型的构建
针对复杂的机场场面综合态势,感知态势后保障机场场面的安全有序是必要的,而场面目前态势与指令发出后场面态势的变化是航空器运行指令风险预警模型构建的重点。本文在基于整体机场可穿越着色petri网模型的基础上定义跑道状态来反映指令发出后场面态势的变化,从而对指令发出后可能的风险进行预警。
本文将跑道状态(u)分为空闲状态,占用状态以及冲突状态,根据跑道起飞区域、跑道着陆区域、跑道穿越区域的库所是否有token来区分不同的跑道状态,当跑道起飞区域、跑道着陆区域、跑道穿越区域均无token,则跑道处于空闲状态;当跑道起飞区域、跑道着陆区域、跑道穿越区域有且仅有一个区域存在token,则跑道处于占用状态;当跑道起飞区域、跑道着陆区域、跑道穿越区域任意两个及两个以上区域存在token,则跑道处于冲突状态。定义跑道的空闲状态为u=0,跑道的占用状态为u=1,跑道的冲突状态为u=2,则跑道状态u满足式(1)

2,else
(1)
根据跑道状态的定义,指令发出后导致跑道状态变为空闲状态或占用状态则不会导致模型的风险预警,而指令发出后导致跑道状态变为冲突状态则会触发风险预警,而触发条件在定义中已给出,管制人员可在风险触发后通过指令的撤销或下达其它航空器运行指令,从而改变跑道状态使得场面态势变化,以解除场面的风险状态。
4 航空器运行指令推演实例分析
根据第3章着色Petri网的机场场面活动筛选模型及3.4节航空器运行指令风险预警模型中跑道状态的定义对航空器运行指令进行推演,文中涉及航空器运行指令相应库所中的逗留时间即航状态的持续时间满足对数正态分布,则图5、图6、图7中各时延库所时间延时的对数正态分布参数见表5。
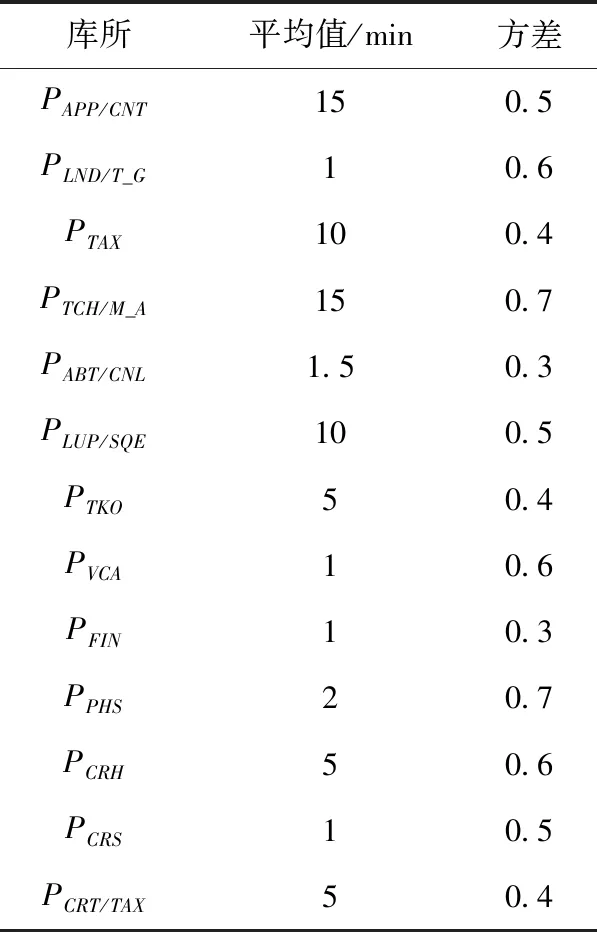
表5 模型中token在不同控制库所激发时的逗留时间设定
采用CPN Tools工具对建立的CTPN模型进行仿真和验证。仿真过程使用的航空器信息流包括:
1`(("flightplanID01","callsign01","19"))++1`(("flightplanID02","callsign02","19"))++
1`(("flightplanID03","callsign03","19"))++1`(("flightplanID04","callsign04","19"))++
1`(("flightplanID05","callsign05","19"))++1`(("flightplanID06","callsign06","19"))++
1`(("flightplanID07","callsign07","19"))++1`(("flightplanID08","callsign08","19"))++
1`(("flightplanID09","callsign09","19"))++1`(("flightplanID10","callsign10","19"))
根据模型定义,这10个航空器信息分别代表航空器识别号01至10,航班呼号01至10,跑道号19,模型仿真结果反映出航空器运行指令的激发导致19号跑道状态持续时间关系的时序逻辑图,如图11所示。
根据上文中跑道状态u的定义,图11为其中两次模拟的跑道状态时序逻辑图,图11(a)模拟结果显示第6分钟到第9分钟,第14分钟到第17分钟,第18分钟到第32分钟跑道由于航空器运行指令的激发保持占用状态;第17分钟到第18分钟由于航空器运行指令的激发导致跑道的多个区域都存在航空器运行,跑道为冲突状态;而其余时间跑道均为空闲状态,图11(b)模拟结果显示第5分钟到第9分钟,第12分钟到第20分钟仿真结果跑道由于航空器运行指令的激发保持占用状态,其余时间跑道均为空闲状态。根据航空器运行指令风险预警模型对图11跑道状态时序逻辑图的分析,图11(a)中第17分钟前跑道状态正常,场面不存在风险第17分钟时跑道状态发生变化,跑道变为冲突状态,航空器运行指令风险预警触发,跑道的冲突状态持续1分钟,随后跑道状态正常,场面态势恢复正常,通过该时序图可知该次仿真跑道状态及场面态势正常概率达到97.14%,图11(b)中在改变航空器运行指令发出的顺序后跑道状态及场面态势正常概率达到100%,未出现指令风险预警。模拟结果显示航空器运行指令的不同顺序以及下达时间的不同会导致跑道的不同状态,对跑道状态是否产生冲突产生影响,航空器运行指令的推演可对跑道潜在的风险进行评估与预测。
5 结束语
本文利用具有较强表达能力和可视化强特点的着色 Petri 网对电子进程单系统中的航空器运行指令进行建模,从航空器依据跑道号的指令并行筛选,航空器起飞或复飞以及后续指令,航空器着陆指令及航空器穿越指令建立异步并发模型,能够直观地模拟航空器场面运行状态及场面各部分使用状态以及状态变化,并通过指令风险预警模型对跑道状态时序逻辑进行分析,得到场面态势在指令时序改变后的正常概率变化,为管制人员提供了对航空器及场面状态分析新的视角和有效的手段。
