组合式飞行器多体动力学建模与飞行力学特性
2023-09-07杜万闪周洲拜昱张志林王科雷
杜万闪, 周洲*, 拜昱, 张志林, 王科雷
(1.西北工业大学 航空学院, 陕西 西安 710072; 2.中国兵器工业第203研究所, 陕西 西安 710061)
0 引言
为了使无人飞行器实现高续航性能和高机动性能的设计目标,组合式多体飞行器作为一种新概念飞行器被提出,相关的研究和试验[1-15]在近现代航空发展史上逐步展开。组合式多体飞行器由多个单体无人机(以下称飞行单元)通过翼尖铰接组合而成。该构型飞行器具有较大展弦比,拥有很高的气动效率和结构安全性;其翼尖连接采用铰接约束,可以阻止弯矩的传递,有利于轻量化设计;保留了飞行单元的机动性和灵活性,兼具组合整体与分散集群的双重优势[1-2]。组合式多体飞行器因这些优势在众多领域中具有重大应用价值,特别是作为一种续航高效的临近空间飞行器。国外极光飞行科学公司于2008年设计的Z型太阳能无人机[3]由3个单体无人机通过翼尖连接而成,昼夜飞行时通过Z型变体方式来减小电能消耗与提高太阳能能量转换效率;Suenaga等[7]设计的翼尖链翼飞行器由多个小型无人机通过翼尖可释放的铰链连接而成,该飞行器以O型折叠在箱子里,通过降落伞在高空中投放,投放后其自行展开,并分离成多个小型无人机单独执行飞行任务。国内Meng等[8]气动弹性研究室针对多机组合式飞行器进行研究,分别于2018年12月和2019年4月成功进行双机和三机首飞测试。此后,针对组合式多体飞行器的研究相对较少,尤其是在动力学特性分析方面。
组合式飞行器呈现出多刚体、多自由度的特点,在变形运动时会较大程度地改变气动外形,因此不能像常规飞行器那样将其视为单个刚体进行飞行动力学建模,而是需要建立一种包含变形自由度的飞行动力学模型。Montalvo等[12-13]基于Newton-Euler方法和非线性升力线模型对Meta Aircraft多种变体形态下的动力学特性进行了研究分析。Kothe等[14-15]基于Kane方法建立了变构型的多体飞行器动力学模型,并进行了闭环飞行试验。文献[16-19]基于拟坐标形式的Lagrange原理建立了包含变形自由度的动力翼伞、仿生变形飞行器等多体系统动力学模型,均取得较好的仿真效果。文献[8-11]针对 7自由度双机组合式飞行器展开飞行力学特性研究,其结论表明组合式飞行器存在对称变形的相对运动特征。然而随着铰接单体数量的增加,组合式飞行器在飞行力学行为上会表现出不对称的相对运动特征,甚至出现多重运动特征耦合的复杂运动形式。组合式三体飞行器相比于双体飞行器可表现出不对称的运动特征,更具典型性和可延拓性。本文针对组合式三体飞行器进行多体动力学建模和飞行力学特性分析,研究其在相对运动过程中的对称运动和不对称运动特征,以此更加全面地反映组合式飞行器的飞行力学特性信息。
本文采用拟坐标形式的Lagrange原理,针对组合式三体飞行器推导建立了8自由度动力学方程,利用计算流体力学(CFD)方法建立考虑气动耦合效应的组合式飞行器气动力数据库,通过算例将所建模型与ADAMS软件的仿真结果进行对比验证。在此基础上进行配平及飞行力学特性研究,分析比较组合式飞行器在不同配平状态的动力学特性,最后基于串级PID控制方法进行增稳控制研究,可为多体飞行器的设计分析提供指导和参考。
1 组合式飞行器模型描述
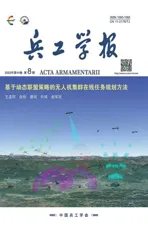
如图1所示,组合式三体飞行器由三个飞行单元组合而成,相邻飞行单元间的翼尖连接采用铰接约束,保留2个相对滚转自由度。本文建模时不考虑机翼柔性影响,假设每个飞行单元均为刚体,图1中整个组合式飞行器可划分为3个刚体分别进行分析,中间的刚体记为飞行单元a,左侧的刚体记为飞行单元b,右侧的刚体记为飞行单元c。上述多刚体模型中飞行单元a具有6个自由度,飞行单元b和c相对于a各有1个自由度,即相对滚转自由度,整个刚体模型共有8个自由度。该模型可以完整地描述飞行单元b、c与a的相对运动,反映飞行器实际的飞行工况。

图1 组合式三体飞行器示意图
1.1 坐标轴系定义
为了便于对多体飞行器进行运动描述和受力分析,引入如下坐标轴系:选取地面参考点Oe作为原点,依据右手定则建立铅垂地面固定坐标轴系Oexeyeze,其中Oeze轴铅垂向下;选取飞行单元a、b、c的质心作为原点分别建立机体坐标轴系Oaxayaza、Obxbybzb、Ocxcyczc,机体坐标轴系随多体飞行器机体一起运动,具体如图2所示。

图2 组合式三体飞行器坐标轴系示意图

1.2 拟坐标和拟速度描述
针对图1所示的组合式三体飞行器8自由度模型,选取下列拟坐标q和拟速度w[16-17]描述该多体飞行器的位形:
(1)
式中:Ra用于描述a质心相对于地面固定坐标轴系原点Oe的位移;Ja用于描述a体坐标轴系相对于地面固定坐标轴系的欧拉姿态角;Jba和Jca分别用于描述b和c体坐标轴系相对于a体坐标轴系的相对滚转角,以矢量形式给出;va为飞行单元a质心相对于地面固定坐标系的速度(在a体坐标轴系下表示);ωa为飞行单元a相对于地面固定坐标轴系的转动角速度(在a体坐标轴系下表示);ωba和ωca分别为b和c体坐标轴系相对于a体坐标轴系的相对滚转角速度(分别在b和c体坐标轴系下表示),以矢量形式给出。上述拟坐标和拟速度的分量形式表示如下:
(2)
(3)
1.3 算例模型参数
本文采用的组合三体飞行器算例模型如图3所示,表1给出了算例模型所用飞行单元的基本参数,单体模型为上单翼布局,机翼展长3.2 m,弦长0.3 m,展弦比约10.6,具体如图4所示,图4中Oxyz为单体模型的机体坐标轴系。

表1 飞行单元基本参数

图3 组合式三体飞行器模型
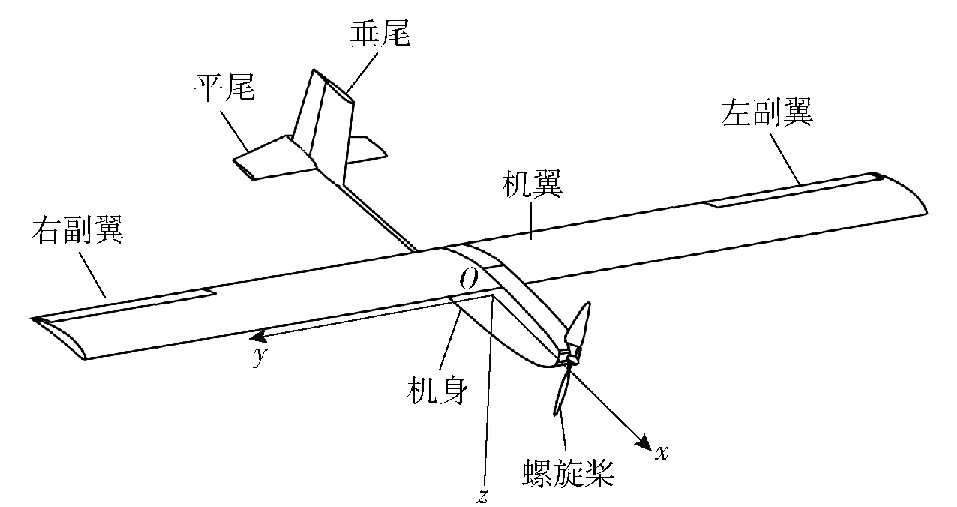
图4 单体飞行器模型
2 多体飞行器系统受力分析
组合式三体飞行器在巡航状态平飞时,多体系统所受外力主要包括气动力、重力和螺旋桨拉力等。 其中,各个飞行单元之间存在气动耦合效应,采用CFD计算方法建立考虑气动耦合效应的组合式飞行器气动力数据库,并对飞行器系统进行受力分析。
2.1 CFD方法建立气动力数据库
组合式飞行器系统的飞行运动是区别于常规飞行器飞行的特殊运动形式,相关的CFD 数值仿真和风洞模拟仿真实验[20]证明组合式飞行器系统采用多个单机以翼尖铰接的形式实现复合飞行时,各个单机的流场会产生气动耦合效应,其气动特性相比单机飞行时存在显著变化。为了表征这种气动耦合效应对单机气动特性的影响,采用CFD方法建立组合式三体飞行器气动力数据库。
由参考文献[21-22]关于多体飞行器系统气动耦合效应的研究可知,非定常效应对多体飞行器飞行的动态特性影响较小。因此在准定常假设下简化计算组合式飞行器系统内部相对滚转过程中飞行单元的气动力,其具体形式以多项式给出,即

(4)

(5)

具体地,建立气动力数据库的CFD仿真内容、气动参数和计算方法如表2所示。

表2 气动力数据库建立方法
在进行CFD计算时,采用结构嵌套网格进行组合式飞行器的流场划分,各飞行单元采用O-H型网格拓扑,背景网格远场取50倍机体长度,机体表面第1层网格高度y+≈0.6,网格总节点数978万。网格情况如图5和图6所示。机体表面为无滑移边界条件,基于定常RANS方程进行流场求解,湍流模型采用SST模型,求解采用Roe隐格式,空间离散均为2阶精度。

图5 单体飞行器网格分布
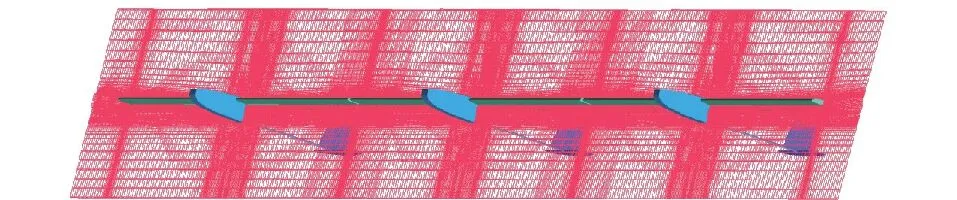
图6 组合式三体飞行器网格分布
在建立气动力数据库时,选取迎角α、侧滑角β以及相对滚转角φba、φca为基准变量,然后通过CFD方法便可计算得到不同工况下组合式三体飞行器系统内各个飞行单元的气动特性。当相对滚转角φba=φca=0°时,各个飞行单元气动参数随迎角α和侧滑角β的变化曲线如图7所示,另外在分析飞行单元气动参数随侧滑角β变化时迎角取α=0°。

图7 飞行单元气动参数随迎角α和侧滑角β变化
在迎角α=0°和侧滑角β=0°的工况下分析相对滚转角φba、φca对各个飞行单元气动特性的影响。在分析相对滚转角φba的影响时,令φca=0°,可以得到各个飞行单元的气动参数随着相对滚转角φba的变化情况。同理,令φba=0°即可得到各个飞行单元的气动参数随相对滚转角φca的变化情况。不难看出,在此情况下相对滚转角φba、φca对各个飞行单元气动特性的影响具有对称性。因此此处只给出在φca=0°时各个飞行单元的气动参数随着相对滚转角φba的变化曲线,如图8所示。

图8 飞行单元气动参数随相对滚转角φba变化
螺旋桨拉力模型通过参考文献[23]给出,即
(6)
式中:Ct为螺旋桨拉力系数;ρ为大气密度;ns为转速(r/min);Dp为桨盘直径。对于算例模型所用的螺旋桨,通过螺旋桨拉力试验可测得不同油门杆量δt下的螺旋桨转速ns,拟合得到电机转速与油门杆量的二次函数关系式为
ns=(-4.44δt+15.65δt-0.02)×103
(7)
式中:δt值为0~1。螺旋桨的前进比[23]定义为
(8)

(9)
2.2 8自由度系统受力分析
组合式三体飞行器系统所受合外力在飞行单元a体坐标轴系下表示为
(10)
式中:Ga、Gb、Gc为各飞行单元所受重力;Fa,a、Fa,b、Fa,c为各飞行单元所受气动力在其体坐标轴系下的投影;Ft,a、Ft,b、Ft,c为各飞行单元所受螺旋桨拉力。
系统所受合力矩在飞行单元a体坐标轴系下表示为
(11)
式中:Ma,a、Ma,b、Ma,c为各飞行单元所受气动力矩在其体坐标轴系下的投影。
飞行单元b和c所受合力矩在其体坐标轴系下分别表示为
(12)
(13)
3 拟坐标形式的组合式飞行器多体动力学模型
3.1 8自由度组合式飞行器动力学建模
拟坐标形式的Lagrange动力学方程[17-19]为
(14)
运动学方程为
(15)
式中:L为拉格朗日函数;H和B为系数矩阵;Q*为广义力矩阵。
针对图4所示的8自由度组合式飞行器算例模型,将重力作为外力处理,忽略其他弹性势能,系统的拉格朗日函数L取所有刚体的动能之和,其中每个飞行单元的动能由平动动能和转动动能组成,具体形式为
(16)
(17)
(18)
(19)
式中:ma、mb、mc和Ia、Ib、Ic分别为各个飞行单元的质量和惯量张量矩阵(对质心,本体坐标轴系)。


(20)
(21)

将式(20)、式(21)代入式(14)整理得到8自由度组合式三体飞行器动力学方程组:
(22)
式中:状态变换矩阵
(23)
Da、Dba、Dca分别为飞行单元a、b、c的欧拉角时间导数到其体轴系转动角速度的坐标转换矩阵;系统广义力矩阵
(24)
系数矩阵
(25)

据式(22),给定初始运动状态就可以求解组合式飞行器系统的飞行特性。
3.2 动力学模型验证
建立8自由度动力学模型的目的是开展精确完整的飞行特性仿真,以便获得更接近于组合式飞行器实际飞行工况的飞行数据。为了验证本文动力学模型的准确性,对组合式三体飞行器进行建模,在相同工况下对比本文模型和所建仿真模型的仿真结果。

图9 飞行单元a状态量响应
为验证本文模型对相对滚转运动描述的准确性,在仿真初始状态的基础上,设定不同状态的相对滚转角φba、φca(见表3)进行求解,得到多体系统相对滚转运动响应如图10所示。

表3 不同初始状态的相对滚转角

图10 不同初始状态的相对滚转角响应
由仿真结果对比分析知,两种模型在相同工况下的仿真结果吻合度很高,本文所建模型可以有效反映2个相对滚转运动的变化情况,能够精确、完整地描述多体飞行器空间运动的位形,验证了本文组合式多体飞行器建模方法的有效性和准确性。
3.3 动力学方程组线性化及其状态空间形式表达
为便于研究组合式飞行器系统的飞行力学特性,本节在3.1节建立的8自由度全量非解耦动力学方程组的基础上,运用小扰动法[24-25]将其进行线性化处理,推导其状态空间形式[26]的小扰动动力学方程组。由2.1节气动力和螺旋桨拉力模型可知,舵面偏转和油门杆量分别影响气动力和螺旋桨拉力大小,引入操纵变量κ=[κ1,κ2,κ3,…]T表征舵量和油门输入,此时可将非线性方程式(22)表达成矢量形式:
(26)
(27)
式(26)、式(27)形式下的动力学方程方便进行配平方程求解及稳定性分析。在规定好未知配平量及配平自由度后,求解式(27)即可给出配平状态解F0。
对式(26)、式(27)在配平状态下进行小扰动线性化处理,其小扰动线性化方程为
(28)

式(28)的状态空间形式为
(29)
式中:
(30)

(31)

(32)
4 组合式飞行器配平及飞行力学特性分析
根据飞行动力学模型,本节对组合式三体飞行器进行配平方案及飞行力学特性分析。为了简化分析计算,配平求解选择定直平飞状态作为分析工况。
4.1 配平方案分析
组合式三体飞行器相比常规飞行器多出2个自由度,其飞行力学模型相比传统飞行力学模型具有显著不同。在翼尖铰接的形式下,每个飞行单元的滚转角不再保持一致,存在相对滚转运动。这就意味着此飞行器在配平时不仅要考虑整体纵向力和力矩平衡,还要保证其内部横侧向相对滚转力矩平衡,所以在求解配平方程时需要根据实际情况来选择配平变量。
组合式无人机的配平操纵由各个飞行单元的执行机构组合运作完成,每个飞行单元具有1个螺旋桨、2个副翼控制面、1个升降舵控制面和1个方向舵控制面。在定直平飞工况下,规定每个飞行单元的副翼控制面联动,偏转大小相同,方向相反即只对滚转运动起作用;3个飞行单元的油门杆量保持一致;3个飞行单元的方向舵和升降舵联动,偏转大小方向均相同。
在进行配平变量组合时,为了保持组合式飞行器整体处于定直平飞状态,联动升降舵和油门杆量用来平衡组合式飞行器系统整体的俯仰运动方程;分开作动的副翼既要用来平衡组合式飞行器系统整体滚转运动方程,也要同时用来平衡系统内部的相对滚转力矩;联动的方向舵则用来平衡组合式飞行器系统的偏航运动方程。由此知,在定直平飞配平状态下,组合式三体飞行器的未知配平量为
(33)
式中:δe为一致的升降舵偏角,即δe,a=δe,b=δe,c,其中δe,a、δe,b、δe,c分别为飞行单元a、b、c的升降舵偏角;δt为一致的油门杆量,即δt,a=δt,b=δt,c,其中δt,a、δt,b、δt,c分别为飞行单元a、b、c的油门杆量;δr为一致的方向舵偏角,即δr,a=δr,b=δr,c,其中δr,a、δr,b、δr,c分别为飞行单元a、b、c的方向舵偏角;δa,a、δa,b、δa,c分别为飞行单元a、b、c的副翼偏角。未知的配平参量有8个,与系统的自由度一致,配平方程可解。
将未知配平量χ代入式(27),并令方程左边取0,即
F(q,w,κ)=0
(34)
给定初始状态便可解算未知配平量,得到配平状态解F0。
本节采用第1.3节给出的组合式三体飞行器算例模型,在飞行工况的空气密度为1.225 kg/m3、飞行速度为10 m/s、飞行迎角为0°的条件下,求解得到两个配平状态,配平计算结果如表4所示。

表4 配平分析结果
由配平计算结果知,在给定飞行速度和迎角时,该组合式三体飞行器存在两个配平点,这与常规飞行器在给定飞行速度或迎角后只有一个配平点具有显著不同。在配平点1处整个飞行器呈“对称下反”状态,在配平点2处整个飞行器呈“对称上反”状态,如图11所示。在每个配平状态下,配平结果全机纵向对称,升降舵偏角由于给定了联动条件,3个飞行单元偏角一致;3个飞行单元油门杆量相同、方向舵偏角均为0°;中间飞行单元a副翼偏角为0°,右侧飞行单元b和左侧飞行单元c的副翼偏转大小相同、方向相反;两个相对滚转角大小相同、方向相反。由此可知,与常规飞行器在配平时只需考虑纵向力和力矩平衡相比,组合式飞行器还需保证横侧向受力平衡和相对滚转力矩平衡,并且其刚体飞行力学纵向和横侧向的动力学方程不能解耦。

图11 两种配平状态
4.2 相对滚转运动静稳定性分析
相比常规飞行器多出2个相对滚转运动是组合式三体飞行器的显著特点,在两种配平状态下研究其静稳定[24]特性。假设飞行器在配平状态下受到较小相对滚转角扰动时,各飞行单元受到的升力大小保持不变。


图12 “对称下反”状态相对滚转运动静稳定性分析


图13 “对称上反”状态相对滚转运动稳定性分析
由以上分析知:飞行器在“对称下反”配平状态的相对滚转运动具有静稳定性;在“对称上反”配平状态的相对滚转运动静不稳定,需要增稳控制加以改善。
4.3 组合式飞行器动力学特性分析


表5 配平状态运动模态分析

表6 新生运动模态特征向量分析
当特征根为共轭复根λ1,2时,对应模态为振荡模态,其特征根形式和时间常数t定义分别为
(35)
(36)
式中:ζ为阻尼比;ωn为自然频率。
当特征根为单实根λ时,对应模态为非振荡模态,其时间常数取半衰期t1/2(模态收敛时振幅变为初始振幅一半的时间)或倍幅时t2(模态发散时振幅变为初始振幅2倍的时间),其特征根形式和时间常数定义如下:

(37)
(38)
(39)

通过对比分析表5中的结果可以发现,除了传统飞行力学模态以外,组合式三体飞行器还多出 4个新生运动模态。为了便于分析新生运动模态的特性变化规律,表6列出了两种配平状态下4个新生运动模态的特征向量(忽略10-4数量级以下的参数),可以发现其中2个新生运动模态主要与纵向运动状态量qa、θa和相对滚转运动状态量ωba、ωca、φba、φca有关,将其命名为复合对称运动模态1和复合对称运动模态2,在这 2个模态中整机具有对称的相对滚转运动特征;另外两个新生运动模态与横侧向运动状态量pa、ra、φa、ψa、ωba、ωca、φba、φca有关,将其命名为复合反对称运动模态1和复合反对称运动模态2,在这2个模态中整机具有不对称的相对滚转运动特征。结合表6特征向量分析可知,新生运动模态具备如下的运动特性:
1)复合对称运动模态1 和复合对称运动模态2是相对滚转角Δφba、Δφca相对于俯仰角Δθa以及相对滚转角速度Δωba、Δωca相对于俯仰角速度Δqa变化较大的对称运动模态;
2)复合反对称运动模态1和复合反对称运动模态2是相对滚转角Δφba、Δφca和滚转角Δφa的变化几乎同量级、偏航角Δψa变化较小以及相对滚转角速度Δωba、Δωca和滚转角速度Δpa变化几乎同量级、偏航角速度Δra变化较小的反对称运动模态。
在“对称下反”配平点1处,该飞行力学系统短周期模态、长周期模态、滚转模态以及荷兰滚模态均呈收敛状态,螺旋模态发散,4个新生运动模态均处于收敛状态。飞行器的螺旋模态发散,且倍幅时较短,当飞行器系统受到横侧向扰动后,其横侧向相关状态量会快速发散,这会影响飞行稳定性,需要通过增稳控制系统加以改善。在“对称上反”配平点2处,该飞行力学系统短周期模态、长周期模态、滚转模态、荷兰滚模态、螺旋模态均收敛。对于该配平点处的新生运动模态,飞行器的复合对称运动模态2和复合反对称运动模态2均发散,而且倍幅时很短,当飞行器的相对滚转运动受到扰动后,这两个模态会快速发散,飞行器在无控状态下无法稳定飞行,这与传统构型飞行器有很大差别。由此可知,组合式三体飞行器系统若以“对称上反”姿态飞行,需要采用合理的控制策略来保证其稳定性。
对比表5中两种配平状态的传统飞行力学模态可知,“对称下反”配平点1处飞行器的荷兰滚模态阻尼比较大,模态特性较好,但螺旋模态是发散的。“对称上反”配平点2处飞行器的螺旋模态相较于“对称下反”配平点1变为稳定收敛,但荷兰滚模态阻尼比下降,模态特性变差。根据参考文献[24],机翼上反效应可以有效增强螺旋模态稳定性,组合式三体飞行器“对称上反”状态就相当于增强了整体机翼上反效应,改善了飞行器螺旋模态特性,而荷兰滚模态特性则相对变差。
表7列出了文献[8]双机组合形式模态特征根,通过对比分析知组合式三体飞行器比双机组合飞行器多出两个复合运动模态,并且前者的4个新生运动模态还可以按照运动特性划分为复合对称运动和复合反对称运动两类,如图14和图15所示。根据文献[8-11],双机组合形式下的复合运动模态均具有纵向对称运动特征。结合以上分析知,组合式三体飞行器表现出双机组合形式不具备的复合反对称运动模态,可以更为全面地反映此类组合式飞行器的飞行力学特性信息。复合运动模态的增多也意味着组合式三体飞行器的动力学特性更加复杂,其飞行控制系统的设计难度和复杂度也会随之增加。

表7 双机组合运动模态

图14 复合对称运动

图15 复合反对称运动
4.4 系统开环时域仿真分析
基于全量非解耦的状态空间模型搭建8自由度飞行器的时域仿真模型,并分别在“对称下反”配平点1和“对称上反”配平点2处,给定相同的Δφba=2°、Δφca=-2°初始对称扰动,得到相对滚转运动状态量的自由响应曲线,如图16和图17所示。

图16 “对称下反”配平点1处系统自由响应

图17 “对称上反”配平点2处系统自由响应
根据自由响应曲线,飞行器在“对称下反”配平状态下受到Δφba=2°、Δφca=-2°的对称初始扰动时,两个相对滚转角速度和相对滚转角均处于收敛状态;飞行器在“对称上反”配平状态下受到相同初始扰动时,两个相对滚转角速度和相对滚转角均快速发散,这与4.3节模态特征根分析结果一致。
在“对称下反”配平点1处,给定Δφba=Δφca=2°的不对称初始扰动,得到系统相关状态量的自由响应曲线如图18所示。根据自由响应曲线,“对称下反”配平状态下的相对滚转运动受到不对称初始扰动时表现出发散的特征,这是因为不对称扰动诱发了组合式飞行器系统螺旋模态发散,进一步导致其相对滚转运动发散。

图18 配平点1处不对称扰动下系统自由响应
根据以上分析,在给定飞行速度和迎角时,该组合式三体飞行器在两个配平状态下的动力学特性有显著不同。在“对称下反”配平点1处,4个复合运动模态均收敛,但螺旋模态发散;当飞行器受到对称相对滚转扰动时系统的自由响应是稳定收敛的,当受到不对称扰动时系统的螺旋模态会快速发散而进一步导致相对滚转运动发散。在“对称上反”配平点2处,系统存在1个复合对称运动模态和1个复合反对称运动模态是发散的,飞行器相对滚转运动受扰动后的自由响应会快速发散。
由此知,无论在配平点1还是配平点2处,飞行器都存在不稳定的模态特征根,在没有增稳控制系统时,飞行器无法长期保持平稳飞行,特别是当飞行器处于“对称上反”状态时,相对滚转运动受到扰动后便会迅速发散。为了保证组合式飞行器在任一配平状态下都能平稳飞行,飞行器需要采取合理的增稳控制策略来使其飞行力学系统镇定。
5 增稳控制系统设计
经过对组合式三体无人机的配平及飞行力学特性分析知,该飞行器在无控状态下无法长期保持稳定飞行。基于串级PID控制器设计方法,设计组合式飞行器的增稳控制器,验证增稳控制策略的有效性。
5.1 串级PID控制器
PID控制器是由比例环节、积分环节和微分环节组成的经典反馈控制器,在科学研究与工业控制中得到极其广泛的应用。PID控制的基础是比例控制,积分控制可消除稳态误差,但可能增加超调;微分控制可加快系统响应速度并减弱超调趋势。PID控制律可表达为
(40)
式中:KP为比例系数;KI为积分系数;KD为微分系数。
串级PID控制器考虑了从执行机构到状态量响应的时间迟滞影响,控制效果相比传统单个PID控制器大幅提升。在设计姿态增稳控制器时,舵面(升降舵等)为整个操纵机构的执行机构,舵面变化会改变飞行器受到的外力矩,从而产生姿态角速度,经过时间积分后姿态角发生变化。在上述控制过程中,从舵面输入到姿态角响应存在时间滞后,导致使用舵面直接控制姿态角的效果不佳;但若在内环增加舵面到姿态角速度的控制回路,控制效果就可以得到大幅提升。外环PID控制器使用目标姿态角与实时姿态角得到目标姿态角速度,在此过程中为了避免积分减慢响应速度、微分引入噪声,使用比例控制器效果较好。内环PID控制器则可以根据实际情况选择,对响应速度要求较高则选择PD控制器,对稳态特性、超调等要求较高则选择PI控制器。
5.2 增稳控制方案
针对多输入多输出(MIMO)系统的控制律设计,可以将其简化为多个单输入单输出(SISO)系统的控制律设计。本文针对组合式三体飞行器系统制定如下增稳控制方案:
1)组合式飞行器在两个配平状态处纵向运动稳定性均良好,因此主要针对其横侧向运动设计增稳控制系统;飞行器系统滚转角φa和相对滚转角φba、φca的增稳控制均采用比例-比例积分(P-PI)形式的串级PID控制器。
2)规定飞行单元a的副翼舵偏δa,a用于滚转角φa的增稳控制,利用滚转角φa作为外环PID控制器的反馈量,利用滚转角速度pa作为内环PID控制器的反馈量。目标滚转角与实时滚转角作差通过外环比例控制器得到目标滚转角速度,目标滚转角速度与实时滚转角速度作差经过内环比例积分控制器输出舵偏δa,a,飞行单元a副翼偏转以达到滚转角φa的增稳目的。其控制律结构为
(41)
式中:φa,c、pa,c滚转角指令值和滚转角速度指令值;φa、pa为实时滚转角和滚转角速度;KP,φ、KP,p、KI,p为控制律参数。
3)规定飞行单元b、c的副翼舵偏δa,b、δa,c分别用于相对滚转角φba、φca的增稳控制,分别利用相对滚转角φba、φca作为外环PID控制器的反馈量,利用相对滚转角速度ωba、ωca作为内环PID控制器的反馈量。目标相对滚转角与实时相对滚转角作差通过外环比例控制器得到目标相对滚转角速度,目标相对滚转角速度与实时相对滚转角速度作差经过内环比例积分控制器输出舵偏δa,b、δa,c,飞行单元b、c的副翼偏转以达到相对滚转角φba、φca的增稳目的。其控制律结构为
(42)
(43)
式中:φba,c、φca,c为相对滚转角指令值;ωba,c、ωca,c为相对滚转角速度指令值;φba、φca和ωba、ωca分别为实时相对滚转角和实时相对滚转角速度;KP,φ、KP,ω、KI,ω为控制律参数。
由增稳控制方案知,该方案可以实现直接对相对滚转运动进行控制,相较于文献[8-9]通过控制每个单体飞行器的滚转角间接控制飞行器相对滚转运动的方案具备优越性。因为本文的拟坐标Lagrange建模方法将两个相对滚转角作为状态量进行解算,非常方便飞行控制系统设计。整个增稳控制系统设计思路如图19所示,在MATLAB/Simulink软件中搭建增稳控制系统进行时域仿真分析,仿真系统框图如图20所示,图20中P表示比例控制器,PI表示比例积分控制器。

图19 增稳控制系统设计思路图

图20 Simulink仿真框图
为了验证本文增稳控制方案的有效性,将横侧向姿态角指令值φa,c、φba,c、φca,c置0°,在“对称上反”配平点2处给定组合式三体飞行器Δφba=2°、Δφca=-2°的对称初始扰动,得到两个相对转角速度和相对滚转角的时域响应曲线如图21所示。由响应曲线可知,加入增稳控制系统后,相对滚转角在1 s左右便收敛为0°,相对滚转角速度在1 s处收敛至0°/s附近,稳态误差在1%以内。对比图17的自由响应曲线可知,该增稳控制系统有效,可以快速镇定发散的飞行力学系统。增稳后的组合式三体飞行器能够在配平点2处以“对称上反”姿态平稳飞行。

图21 增稳控制后配平点2处对称扰动响应
在“对称下反”配平点1处,给定飞行器系统Δφba=Δφca=2°的不对称初始扰动,得到相关状态量的时域响应曲线如图22所示。由图22可知,飞行器系统横向运动状态量均呈快速收敛状态,对比图18不对称扰动下系统的自由响应曲线可知,增稳控制方案可以有效抑制不对称扰动诱发的螺旋模态发散现象,同时可以镇定发散的相对滚转运动,从而保证飞行器在配平点1处以“对称下反”姿态可以保持长久稳定飞行。
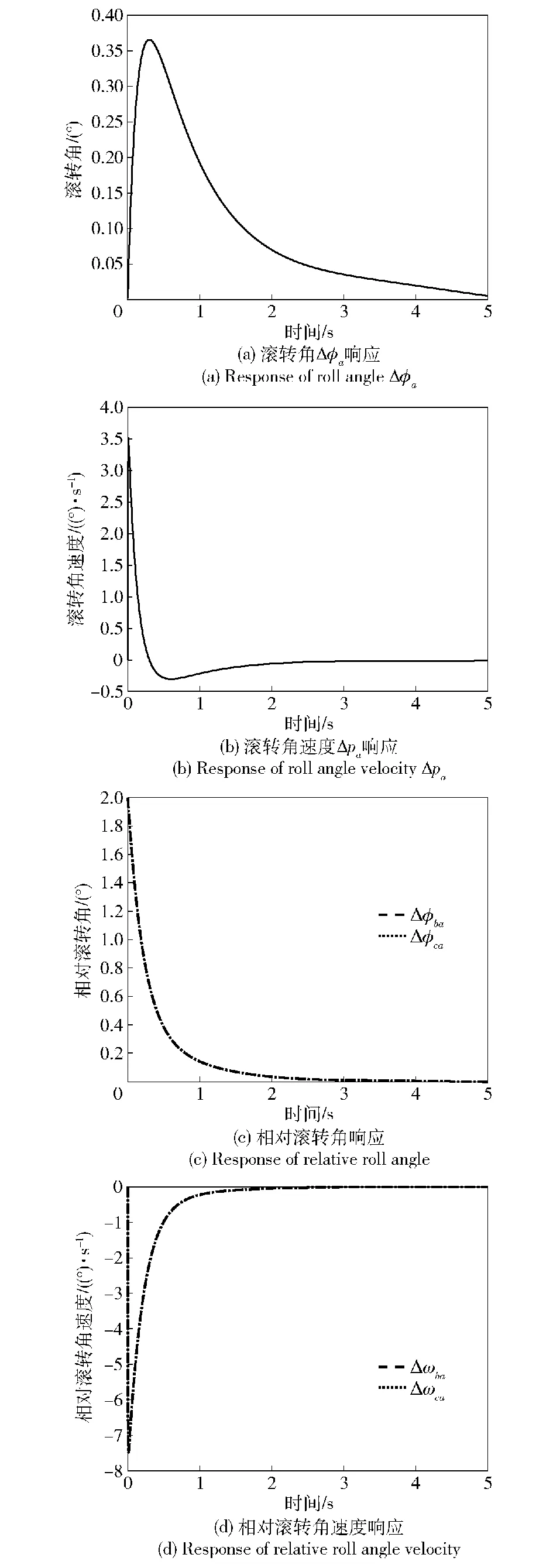
图22 增稳控制后配平点1处不对称扰动响应
6 结论
本文通过CFD方法建立了考虑气动耦合效应的组合式三体飞行器气动力数据库,基于拟坐标形式的Lagrange原理推导出3体8自由度多体动力学模型,在此基础上进行配平及飞行力学特性分析,并采用串级PID控制方法设计了组合式飞行器的增稳控制系统。得出以下主要结论:
1)组合式三体飞行器的动力学模型呈现多刚体、多自由度特点,常规飞行器的单刚体6自由度动力学建模方法不再适用。针对其飞行时的运动特点,利用拟坐标形式的Lagrange原理建立了考虑飞行单元间气动耦合效应、反映相对滚转运动的8自由度飞行动力学模型。通过算例将所建模型与仿真结果进行对比,验证了所建模型能够精确、完整地描述多体飞行器空间运动的位形。
2)基于所建模型对组合式三体飞行器的配平状态进行了求解及分析。在给定配平方案后,相较于常规飞行器在同一速度或迎角下只有一个配平点,该飞行器在给定飞行速度和迎角时存在两个配平点,分别为“对称下反”配平点1和“对称下反”配平点2;飞行器在“对称下反”配平状态的相对滚转运动具有静稳定性,在“对称上反”配平状态的相对滚转运动静不稳定。此类多体飞行器在配平时不仅要考虑纵向力和力矩平衡,还需保证横侧向受力平衡和相对滚转力矩平衡,其刚体飞行力学纵向和横侧向的动力学方程不能解耦。
3)在两个配平状态下分别对飞行器系统进行动力学特性分析,组合式三体飞行器相较于常规飞行器多出4个新生运动模态。4个新生运动模态按运动特性可划分为复合对称运动和复合反对称运动两类。组合式三体飞行器表现出双机组合形式不具备的复合反对称运动模态,可以更加全面地反映此类组合式飞行器的飞行力学特性信息。
4)在“对称下反”配平点1处,飞行器的复合对称运动模态和复合反对称运动模态均收敛,但螺旋模态发散,倍幅时较短。在“对称上反”配平点2处,飞行器的传统飞行力学模态均收敛,但复合对称运动模态和复合反对称运动模态各存在1个发散的特征根,且倍幅时很短,无控状态下影响飞行器稳定性。“对称上反”状态增强了整个飞行器的机翼上反效应,改善了螺旋模态特性。
5)基于串级PID控制器设计方法,设计了组合式三体飞行器的增稳控制系统。姿态增稳控制设计主要针对滚转角φa和两个相对滚转角φba、φca进行。利用姿态角速度作为内环比例积分控制器的反馈量,利用姿态角作为外环比例控制器的反馈量,控制输出为副翼舵偏指令。经过仿真分析,该增稳控制方案合理有效,可以快速镇定发散的飞行力学系统。
针对组合式飞行器的多体动力学建模方法和增稳控制系统设计方法移植性较强,可为同类多体飞行器的设计分析提供指导与参考,且本文的建模方法直接对相对运动状态量进行解算,十分方便飞行控制系统设计。对于此类多体飞行器的研究设计,本文作出如下展望:研究不同连接刚度对整个多体飞行器动力学特性的影响;研究此类飞行器受到环境、大展弦比、柔性变形等因素影响下的智能控制技术等。