基于动态联盟策略的无人机集群在线任务规划方法
2023-09-07王孟阳张栋唐硕许斌赵军民
王孟阳, 张栋*, 唐硕, 许斌, 赵军民
(1.西北工业大学 航天学院, 陕西 西安 710072; 2.陕西省空天飞行器设计重点实验室, 陕西 西安 710072;3.西北工业大学 自动化学院, 陕西 西安 710072; 4.西安现代控制技术研究所, 陕西 西安 710018)
0 引言
随着武器装备技术的发展以及作战样式的改变,作战逐渐向着网络化、智能化、集群化的方向发展,基于分布式自组网通信架构的无人机(UAV)集群作战技术是目前国内外学界研究热点[1-2]。UAV集群整合了无人技术优势和群体自组织特性,在原有基础上通过能力互补和协同行动实现无人作战分布式自主协同,具有自组织性、群体稳定性、高弹性和高效能等优势[3-4]。由于战场环境动态变化、作战需求多样、作战任务复杂、集群飞行器异构、网络通信不稳定等因素,使得集群作战任务规划面临着巨大的挑战,因此,有必要研究更高效的集群协同方法,以最大限度地提高集群作战效能。
任务规划是UAV集群作战的关键技术,其研究重点是UAV集群、目标群和任务群之间的优化配置,实现集群任务分解、任务分配及航迹设计,是对集群有限资源的合理配置、分析和利用,进而实现多机高效协同地执行任务[5]。通常将任务规划建模看作是一种组合优化问题,在特定的场景要求下对问题进行适当简化建立多约束模型,而后采用多组合优化问题模型进行求解,包括多旅行商问题模型[6]、车辆路由问题模型[7]、混合整数线性规划模型[8]、网络流优化模型[9]等。在任务规划求解方面,近年来诸如粒子群算法[10]、差分进化算法[11]、狼群算法[12]、遗传算法[13-14]、蚁群算法[15]和萤火虫算法[16]等启发算法因其简单有效的优势受到学者们的广泛青睐。其中蚁群算法自提出以来就被应用于各类复杂组合优化问题求解中,通过对自然界中真实蚁群觅食机制的模拟,建立人工蚁群,将问题解空间搜索中的启发信息表达到蚁群的信息素释放、挥发机制中,在搜索过程中引入正反馈机制,提高了算法的鲁棒性、灵活性和收敛速度[17]。
分布式架构下集群依靠通信网络实现态势一致性,是任务规划的重要基础。针对任务规划过程中集群通信约束及通信故障等问题[18],文献[19]首次将多智能体系统中的联盟概念引入到多UAV系统中,建立了组建最优联盟的数学模型,并采用粒子群算法进行求解,但是该方法需要预先知道任务环境的全部信息,算法存在实时性较低的问题;文献[20]提出了一种未知环境下的异构多UAV协同搜索打击中的联盟组建方法,但没有考虑到通信距离、通信时延等约束对任务联盟的影响;文献[21]研究了任务执行过程通信拓扑变化时,以距离为原则进行联盟划分的集群编队控制方法,但考虑的任务效能指标过少,不能最大化发挥集群优势;文献[22]提出了一种改进的合同网协议的目标分配方案解决UAV集群攻击任务的复杂性而导致分配不均匀的问题;文献[23]基于合同网算法构建多项式时间联盟构建方法,进行任务分配满足UAV联盟最快到达目标;文献[24]提出了一种异构多UAV协同任务联盟组建方法,用于解决存在通信距离、时间延迟等约束条件下的局部任务分配问题,但在任务联盟组建过程中仅考虑任务资源没有以航迹效能作为UAV的投标信息,因此获得的任务效能与真实环境下的任务效能存在较大偏差。
由于战场环境的复杂多变,基于任务信息已知、环境变化可预测、UAV集群和目标匹配关系固定的离线任务规划已不能适应作战要求。面对复杂多变、动态不确定的作战场景,UAV集群需要在满足任务约束、执行能力约束、通信距离受限、实时网络通信结构不定、通信时延等多约束条件下实时调整任务序列和飞行航迹。
为解决以上问题,本文针对异构UAV集群执行侦察-打击-评估一体任务,提出一种基于动态联盟组建策略的集群在线任务规划方法。考虑UAV集群执行任务的能力约束、载荷约束、目标约束、任务约束、执行约束等多约束条件,构建了UAV集群的任务规划数学模型。针对复杂动态作战场景,考虑到网络拓扑结构、通信距离和通信延迟,设计了一种UAV集群动态联盟组建策略。任务联盟组建过程中针对任务序列与集群航迹的耦合问题,提出了能够最大化效能的任务规划求解算法。
1 UAV集群协同动态任务场景问题描述
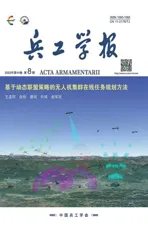
以UAV集群执行侦察-打击-评估一体任务为场景进行描述,具体描述为:场景区域内存在多架异构UAV,UAV可携带侦察、打击和评估任务载荷。初始状态下集群仅仅通过己方雷达得知敌方目标的大致位置信息,因此集群需要对区域内的目标进行协同侦察定位获得精确的目标信息,触发集群对目标打击和评估任务。在此过程中会涉及到新的威胁、新的目标或者是新的任务出现,如图1所示。当出现动态威胁时,要实现出现即避开的任务要求;当出现动态目标时,要实现出现即侦察、侦察即打击、打击即评估的任务要求,因此,UAV集群执行任务过程中必须具有空间协同,时间协同和任务协同特性。
图1 UAV集群协同动态任务示意图
UAV为了实现上述动态过程,当携带探测设备的UAV发现新目标时,考虑到单架UAV不能满足对目标的任务资源约束,需要确定对该目标的最合理的UAV任务执行序列,使得任务效能最大化又能保持集群的稳定性和连通性,将该UAV序列称为任务联盟。由该UAV作为长机并向其通信范围内的UAV进行通信,通过招标、投标过程组建动态任务联盟,协调其余UAV进行协同任务规划,包括协同动态任务分配和动态航迹规划,为满足任务执行效能的最大化,联盟内UAV要求按照一定的时间间隔和进入角约束执行打击和评估任务。UAV集群在动态战场环境内不断发现新目标并触发集群对目标的动态任务,直至完成对区域内所有目标的侦察、打击和评估。
集群任务执行过程中需要满足UAV单体飞行性能、目标状态,战场威胁、通信状态、战场环境、任务协同以及空间、时间约束等动态约束,因此战场环境的复杂性与动态性使得追求作战任务指标的全局最优通常是不现实的。当要求集群对动态战场环境做出敏捷性响应时,需要在任务指标的最优性和实时性之间找到一个平衡点,战场态势的变化要求UAV实时调整其任务计划,具备动态反馈机制和规划能力。针对该动态过程,本文的研究重点是建立动态任务规划多约束模型,结合协同任务执行过程中的特点,给出通信约束下的集群动态察打评一体任务的任务分配和航迹规划的耦合求解方法。
2 UAV异构集群任务规划建模
2.1 UAV及目标模型
根据上述的场景问题描述,建立UAV集群任务规划数学模型,其模型描述为如下五元组:
{E,U,T,M,C}
(1)
式中:E为战场环境;U为UAV集合,U={Ui|i=1,2,…,nU},nU为UAV数量;T为目标集合,T={Tj|j=1,2,…,nT},nT为目标数量;M为待执行任务集合,M={Mk|k=1,2,…,nM},nM为任务总数;C为UAV执行任务的多约束集合。下面分别对各元素进行建模。
2.1.1 UAV能力模型
UAV安装有自动驾驶仪,为简化任务规划过程,假设UAV集群在执行任务过程中保持匀速定高飞行,集群规划路径可以通过高度分层实现相互避碰,集群航迹规划考虑二维平面内的航迹规划,UAV运动的数学模型为
(2)
式中:(x,y)为UAV位置;v为UAV速度;φ为UAV飞行航向角,φ∈(-π rad,π rad];Wφ为自动驾驶仪增益;φc为UAV控制指令。
UAV执行任务需满足燃油约束,任务规划过程中燃油约束等效为UAV最大飞行航程,表示为
Li≤Li,max
(3)
式中:Li为UAVUi飞行航程;Li,max为Ui最大飞行航程。
2.1.2 UAV载荷模型
UAV单体携带的载荷资源有限,UAVUi携带的载荷表示为一个三维向量:
(4)

2.1.3 目标模型
为了保证对目标的准确位置定位、打击及毁伤评估,目标Tj所需的任务载荷资源需求向量表示为
(5)

考虑到目标的资源需求,执行目标Tj对应任务的UAV联盟Uallocation所需要的总资源表示为
(6)
2.2 效能模型
在任务规划过程中,效能评价指标采用任务联盟内UAV集合规划完成的任务价值、完成任务的总路径长度及任务时间协同差值三类指标进行衡量。当准确定位出目标Tj时,针对Tj的待执行任务集合Mj组建任务联盟Uallocation,Mj与Tj所需的任务载荷资源Rj对应,表示为
(7)
式中:nm为目标Tj当前待执行的任务数目,nm=ns+ne;Rj,k为目标Tj执行的第k个任务所需资源,包括打击和评估资源;fj,k为完成Rj,k对应的预期奖励价值[24],可表示为
fj,k=Fj,k×e-βj×tj,k
(8)

(9)
在约束条件下的UAV集群任务规划的优化评价指标之一就是使得J1(Tj)最大化,即集群覆盖任务奖励最大化。
设Li为Uallocation内Ui执行完成所有任务的预估航程值,在实际应用和仿真计算指标中,通常将航程效能指标表示为剩余航程最大化,则集群的飞行航程效能指标J2(Tj)计算如下:
(10)
任务规划目标是使得集群协同到达时间差最小化,为了满足任务时间协同约束tj,集群协同效能指标J3(Tj)计算如下:
(11)
式中:tk,p为任务规划过程中Uk预估完成时间。任务联盟组建的目标是在满足UAV动态联盟和各类约束条件下使得效能指标最大化,对目标Tj问题效能函数J(Tj)为
J(Tj)=ω1J1(Tj)+ω2J2(Tj)-ω3J3(Tj)
(12)
式中:ω1、ω2和ω3分别为3项任务指标的权重系数,通过调整权重系数可以获得不同的任务执行效果。
2.3 多约束模型
对于UAV集群协同执行察打评一体动态任务,建立多约束模型。
2.3.1 战场威胁模型
将战场环境中存在的威胁模型建立为空间中的圆柱体模型,仅考虑二维平面上的避障问题,因此将威胁表示为
PT=[xT,yT,rT]
(13)
式中:(xT,yT)是威胁平面的圆心;rT是威胁半径。规划过程中飞行航路必须在指定的飞行空间内,不能进入威胁空间。
2.3.2 任务时序约束
如果不同的任务Mj和Mk之间存在绝对的先后顺序,则称任务存在时序约束,任务时序为一种偏序关系[25]。如果Mk必须在Mj之前执行,则称Mk为Mj的前序任务,Mj为Mk的后继任务,具体表达为
(14)
式中:enforce[{},]表示绝对时序关系。
2.3.3 任务协同约束
任务执行过程中,针对目标Tj的任务集合Rj需要UAV联盟Uallocation协同完成,用qj∈{0,1}表示Rj的执行变量。当Uallocation被分配执行完成任务集合Rj时,qj=1,否则qj=0。
2.3.4 生成航迹约束
将UAV的航迹约束分为以下3个层面:几何层面、任务层面和环境层面[26]。
如图2所示为3架UAV对环境内两个目标执行侦察、打击和评估任务。对T1依次由U1执行侦察任务{R},U2和U3执行双重打击任务{S},U3执行打击任务过程中,避开环境中存在的威胁;对目标T2,依次执行打击任务{S}和评估任务{E}。根据图2的几何表示,几何层面的航迹约束条件清晰可见。设ki(t)为Ui在t时刻的轨迹曲率,ki(t)应满足:

图2 航迹约束的几何表示
ki(t)≤1/rmin
(15)
式中:rmin为Ui的最小转弯半径。
(16)


(17)
式中:(xi(t),yi(t))为Ui在t时刻位置;(xj,T,yj,T)为威胁j圆心坐标;rj,T为威胁j圆半径。
综上,将异构UAV集群对新目标组建联盟的任务规划问题建模为多约束优化问题,其效能函数为式(12),约束条件为式(3)~式(6)和式(14)~式(17)。
3 基于动态联盟组建策略的任务规划方法
由上述问题描述和建模可知,当集群定位出目标时,触发对目标的任务规划,由于UAV一直处于机动状态,通信范围有限,集群内通信网络存在拓扑结构实时变化的情况。基于场景模型及约束,设计一种基于动态联盟组建策略的任务规划方法,首先根据网络拓扑结构提出动态联盟组建方法,然后针对新目标的局部任务规划采用耦合Dubins航迹的分工机制蚁群算法进行任务规划求解。该方法能够有效求解动态网络拓扑结构、UAV模型、目标模型、多约束模型、通信范围和通信时延约束下的任务规划问题。
3.1 网络拓扑结构
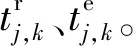
UAV集群自组网采用UAV间双向通信的方式,既能支持信息的传输与共享,又能使成员得知其在任务中所处的地位[27]。矩阵A=[aij]∈n×n表示UAV之间的通信关系,aij表示Ui和Uj之间是否进行通信,aij=1表示通信连接,aij=0则通信断开,aij=aji,信息可以在UAV之间双向传递。本文采用的自组网通信对应的结点拓扑关系是时变的,如图3所示。
图3 网络通信拓扑
当集群内某架携带侦察载荷的UAV发现目标时,触发针对此目标的动态任务规划。实际任务过程中UAV一直处于飞行状态,考虑到UAV的通信距离rn和通信时延约束Δtd,信息交流只能发生在通信相互连通的UAV之间。对于任意一架Ui,能与其通信连接的其他UAV称为Ui的邻域UAV,表示为Ls(Ui),图4为集群通信结构示意图。
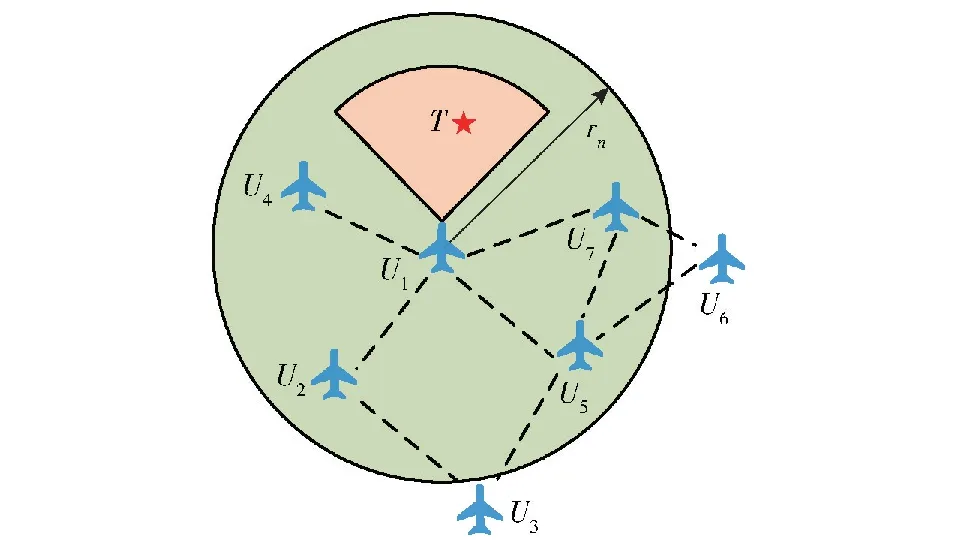
图4 UAV集群的通信示意图
在图4中共有7架UAV,绿色区域表示U1的通信范围,虚线表示UAV之间的网络连接,U1的邻域UAV为Ls(U1)={U2,U4,U5,U7},U1发现目标T并将其信息发送至Ls(U1)内UAV,由于通信时延的作用,U1及其邻域之间的通信均经过Δtd后才能相互传达。
3.2 基于Dubins算法的航迹生成
Dubins曲线能够将两个曲率有限的点按照一定方向连接起来。由于Dubins曲线长度容易计算,因此本文使用Dubins曲线来生成飞行路径。
通常有6种Dubins曲线:两条内切曲线、两条外切曲线和两条外切圆。设曲线起点位置和终点位置分别为Ps(xs,ys)和Pf(xf,yf),起点和终端速度分别为vs和vf,航向角分别为φs和φf,起始和终端圆半径分别为rs和rf,Dubins曲线的解的构造过程可用向量Ls和Lf表示为
Ls(xs,ys,φs,rs)→Lf(xf,yf,φf,rf)
(18)
如果曲线路径上没有威胁,使用简单的Dubins曲线平滑地连接起始点和终端点。当检测到威胁时,且覆盖UAV原有飞行路径,则重新规划以避开威胁。路径的重规划可看作在原有起始点和终端点中间选择一个安全点P1(x1,y1)或P2(x2,y2),如图5所示,虚线γ为原始路径,以曲线长度最短为原则选择两个安全点中离原始路径较近的点P1作为中点,根据中点速度方向与安全圆相切确定中点航向角φ1,安全圆D半径为rD=κrT,其中rT为威胁半径,κ为安全系数,κ>1。由此将路径重新规划问题看作是Dubins曲线的二段解。第1段是Ls(xs,ys,φs,rs)→L1(x1,y1,φ1,rD),第2段是L1(x1,y1,φ1,rD)→Lf(xf,yf,φf,rf),得到实线γ1是基于Dubins曲线生成的避开环境中威胁的飞行路径。

图5 威胁规避路径示意图
为实现多机终端时间一致的协同航迹规划,文献[28]基于Dubins曲线航迹提出一种空间协同约束下的多机打击快速航迹规划方法,通过对曲线半径参数的优化实现多机航迹同步,以某一UAV参考航迹为基准,对其余UAV的Dubins曲线半径进行求解,得到满足终端时间一致性要求的多机航迹。本文采用文献[28]提出的方法实现多机协同航迹计算。
3.3 基于动态网络拓扑的任务联盟组建
考虑到UAV的探测距离和通信时延等约束,根据目标状态及任务要求,机间相对距离和通信半径的相对关系,UAV携带资源载荷的差异,将动态任务联盟的组建分为4个步骤:招标发布、投标申请、联盟组建和航迹规划及执行,对应的状态转移规则和通信交流规则如图6所示。
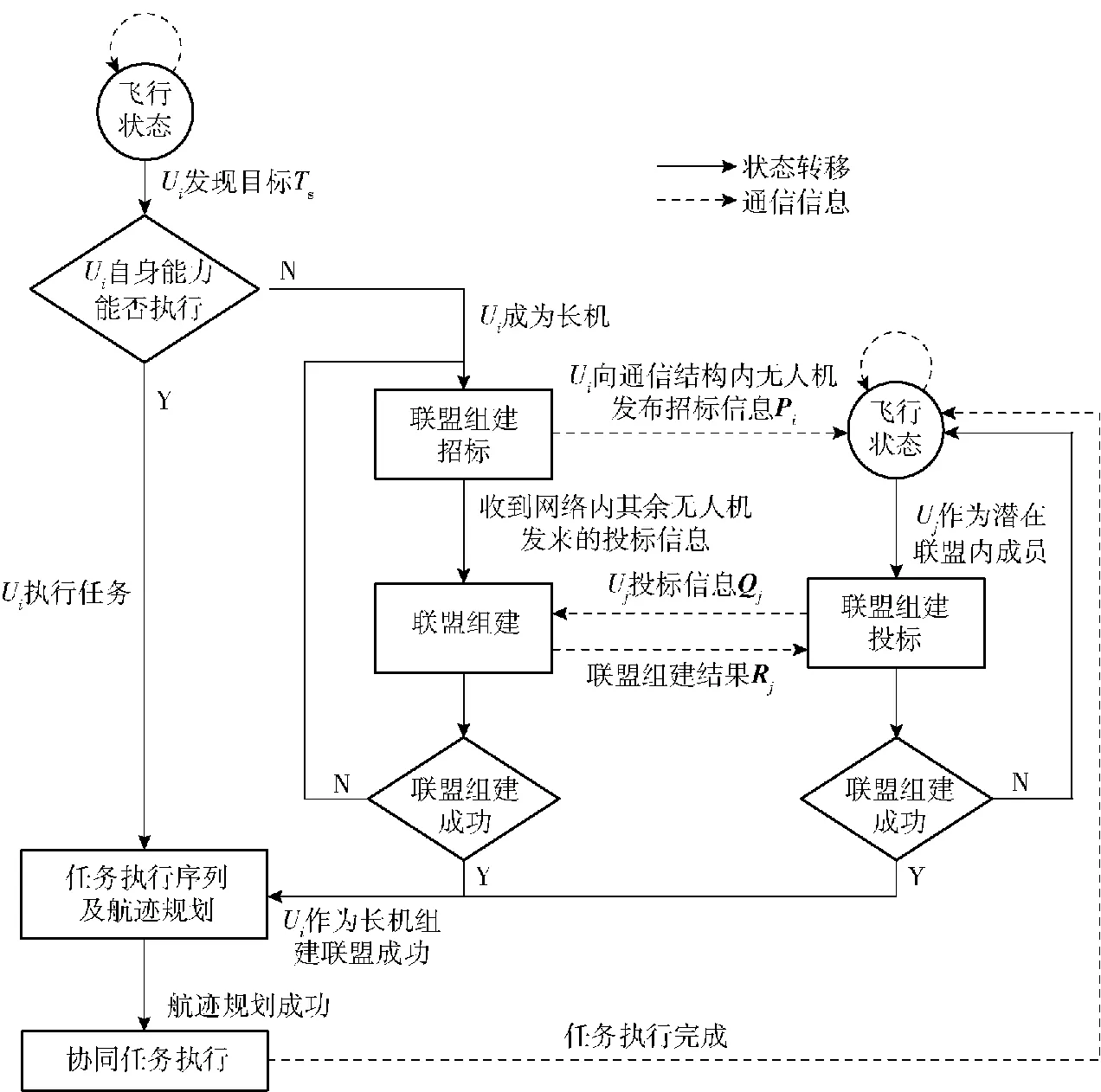
图6 状态及通信转移规则
招标发布阶段,由发现目标的UAV作为联盟长机向其通信范围内的UAV发布招标信息;投标申请阶段,具有稳定通信和资源能力的UAV向长机发送投标信息;在联盟组建阶段,长机根据收到的投标信息进行任务分配确定联盟成员,并发送授权结果;航迹规划及执行阶段,联盟成员根据需求约束进行航迹重规划执行任务。
3.3.1 招标发布
每架UAV状态均为飞行状态,当Ui发现新目标Ts时,Ui完成对目标的准确定位及评估,若Ts不需要执行协同任务,则由Ui对其执行任务;若对Ts需要执行多机协同任务,则Ui自动成为联盟长机,进入联盟组建招标发布状态,向其邻域内的UAV发布招标信息。联盟长机发送的招标信息用向量Pi表示:
(19)

为保证招标信息的一致性,招标过程中存在一种情况:同一通信局域网内的不同UAV同时发现多个目标,此时通信网络内存在多个招标信息。为避免系统冲突和资源浪费,需要对同一通信局域网内的招标信息达成一致,即若Ui发布招标信息的同时接收到来自Uk的招标信息,此刻Ui比较Pi和Pk中任务奖励信息大小:若Pk中奖励信息大于Pi,则Ui对Pk进行任务投标并将招标信息Pi储存待任务执行完毕后再行招标;反之继续执行对Pi的联盟组建过程,从而实现集群内信息一致性。
3.3.2 投标申请
UAV之间存在通信范围rn、通信时延Δtd、联盟组建计算时间tTA,因此联盟组建不是瞬时完成的。在此阶段集群处于持续飞行状态,在联盟组建的过程中集群通信拓扑动态变化,可能会导致部分UAV超出距离无法接收到长机信息的情况。根据招标发布-投标申请-联盟组建过程中的3次信息交流,计算联盟组建过程耗时最大值δmax为
δmax=3·Δtd+tTA+δt
(20)

(21)
(22)
(23)
为避免通信资源浪费,Uj在一次投标过程中不再参与另一局域网内UAV的招标过程,直至其自身联盟组建失败或任务执行完成。
3.3.3 联盟组建
联盟长机收到所有潜在联盟成员的联盟投标信息后,综合所有成员的投标信息组建联盟,若投标信息满足任务Ms执行约束,则联盟组建成功,否则联盟组建失败,长机重新进行联盟组建招标提议。以最优化执行任务为前提,长机在满足联盟成员数目的约束下,采用分工机制蚁群算法从联盟潜在成员集合Upotential中选择任务预估完成时间较少的UAV组成任务联盟Uallocation:
(24)
如果联盟组建成功长机也作为联盟成员进行任务分配,将任务分配结果Dj作为联盟结果反馈给联盟成员Uj。联盟结果信息包括联盟成员编号NU,每个联盟成员执行任务的角度α及预估任务执行时间λj,作为航迹生成的约束进入航迹规划状态。联盟组建结果Dj表示为
Dj={NU,Ts,Mj,s,aj,λj}
(25)
式中:Mj,s为Uj对目标Ts的任务信息;αj为Uj的分配任务执行角度。
3.3.4 航迹规划及执行
联盟内的每个成员需要根据自身当前状态、联盟组建结果信息Dj、预估任务执行时间λj和目标任务信息Mj,s和αj重新规划自身航迹执行任务,以此达到集群协同涌现效果。航迹规划完成后,进入对目标Ts的协同任务执行状态。当任务执行完成后,相应地减少自身的任务资源,重新进入飞行状态等待新的任务联盟组建并执行分配任务。
3.4 分工机制蚁群算法

(26)
(27)

(28)
(29)
(30)
(31)

(32)
式中:ρ∈[0,1)为信息素挥发系数,包括局部信息素挥发系数ρlocal和全局信息素挥发系数ρglobal。
任务联盟组建完成后,根据式(7)~式(12)计算当前代任务执行效能J,并与全局任务最优执行效能Jbest进行比较,若优于全局最优任务执行效能,则更新联盟成员全局最优执行计划Mbest和执行效能Jbest。
基于动态联盟的异构UAV集群在线任务规划的算法伪代码见算法1,具体描述如下:
1)任务联盟招标-投标。UAV发现目标成为长机,向其邻域内的其余UAV发布任务招标信息,进行“招标-投标”任务联盟组建过程(算法1的4~6行);
2)任务分配。初始化蚁群算法并建立人工蚂蚁簇(算法1的7~10行),对人工蚂蚁簇内的蚂蚁分别进行任务分配计算,其中蚂蚁任务转移路径长度按照Dubins航迹进行约束规划(算法1的14行)。比较每代任务执行效能J与全局任务最优效能Jbest(算法1的20~24行),迭代结束得到任务最优执行序列和集群航迹。
3)任务联盟组建及飞行航迹规划。输出任务规划最优方案并由长机释放任务联盟组建结果信息(算法1的28~29行),联盟成员根据任务联盟组建及任务分配结果进行航迹规划(算法1的 30行)。
4)集群任务执行。联盟成员按照最优航迹飞行执行任务,任务执行结束等待下一次任务联盟组建(算法1的31~32行)。
算法1UAV集群U的在线任务规划算法

2: Output: 最优任务方案Mbest和任务航迹
3: Begin
4: UAV发现目标并成为长机
5: UAV长机根据式(19)发布招标信息
6: 长机通信范围内的其余UAV根据式(22)进行任务投标
7: 任务联盟组建过程
8:c←0
10: 平均分配给每架UAV由m只蚂蚁组成的人工蚂蚁簇
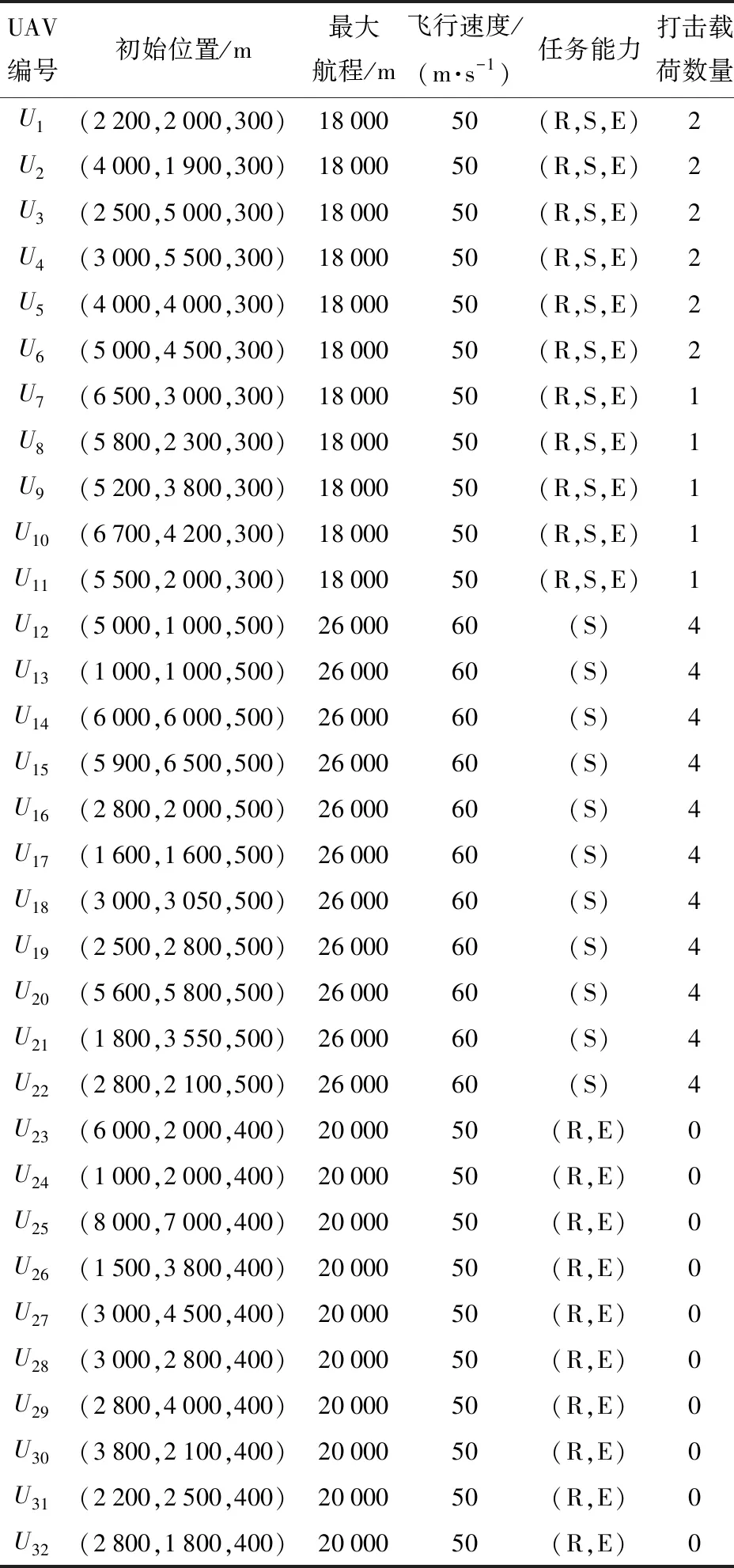
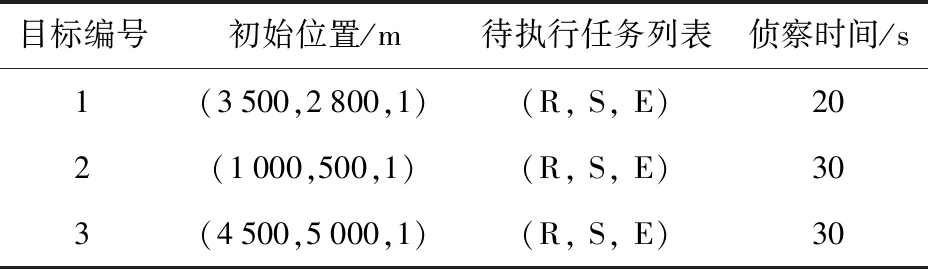
11: whilec 12: 执行分工机制蚁群算法计算 14: 对各投标UAV进行按式(18)进行Dubins路径规划 15: 根据式(26)~式(31)计算AC状态转移 16: End 17: AC局部信息素更新 18: AC根据式(32)全局信息素更新 19: AC根据式(7)~式(12)计算评价指标 ←J 20: ifJ>Jbestdo 21:Jbest=J 22:Mbest=M 23: End 24: 迭代更新 25: 每个UAV分配新一代人工蚂蚁簇 26:c←c+1 27: End 28: 输出最佳解决方案Mbest 29: 集群长机根据式(25)发布任务分配结果 30: 联盟内UAV根据任务协同指标进行Dubins航迹规划 31: UAV集群协同飞行 32: UAV集群任务结束后等待组建形成新的任务联盟 33: End 为验证基于动态联盟的集群在线任务规划方法,分别对UAV集群执行察打评一体任务的动态任务规划和通信约束下的算法性能进行仿真分析。以典型的察打评一体化的任务场景为例来仿真UAV集群动态联盟组建任务规划全过程,通过Monte Carlo仿真分析不同联盟组建算法性能并进行对比,通过Monte Carlo仿真分析不同通信延迟和通信裕度时间对集群任务执行效能的影响,通过虚实结合半实物仿真对本文提出的方法有效性进行验证。 为了便于仿真效果展示,UAV集群包括32架UAV,分别由11架携带察打评一体载荷的UAV、11架携带打击载荷的UAV和10架携带侦察评估载荷的UAV构成。任务区域内存在3个目标,待执行察打评一体任务,环境中存在若干威胁。初始时刻UAV集群随机分布在任务环境中,UAV的位置、最大航程、载荷资源和任务能力如表1所示,UAV初始航向角不同,打击载荷资源末端打击距离均为200 m,任务能力表示UAV是否携带侦察R、打击S和评估载荷E。目标初始参数如表 2所示。数据链通信参数为:机间通信距离为1 500 m,机间通信延迟为Δtd=0.2 s,联盟组建计算时间为tTA=0.5 s,通信耗时裕值δt=0.3 s。 表1 初始时刻各UAV的信息 表2 初始时刻各目标的信息 图7 U1招标状态 邻域UAV判断在联盟组建过程中能否一直处于U1的通信范围内,得到联盟潜在成员Upotential={U3,U4,U5,U6,U7,U8,U9,U11,U13,U14,U16,U17,U19,U20,U22,U24,U27,U30,U31}。联盟潜在成员向长机进行任务投标,长机评估任务资源和任务效能,构建任务联盟Uallocation={U1,U5,U6,U7,U8,U9,U11,U16,U17,U20}执行对目标T3的打击和评估任务,考虑到爆炸烟雾等对评估任务效能的影响,评估任务须在打击完成10 s后开始执行,且评估任务执行时间为20 s。联盟内UAV的任务航迹如图8(a)所示,联盟内UAV与目标之间距离如图8(b)所示。从图中可以看出,其中〈U1,U6,U7,U8,U9,U16,U17,U20〉被分配在不同终端打击角度的约束下同时打击目标T1,预计打击时刻为101.44 s。UAV〈U5,U11〉在时间约束条件下于111.44 s执行对目标T1打击效果的评估,持续时间为20 s,图8(b)中空五星为对T1的打击时刻。 图8 t=43.92 s时UAV联盟针对目标T1的任务规划结果 U27于t=54.23 s完成对目标T3的30 s持续侦察定位,确定目标T3需要4架携带打击载荷的UAV分别从60°方向等时间间隔打击,时间差为5 s,需要3架UAV评估。U27的潜在任务联盟成员为Upotential={U2,U3,U10,U13,U18,U19,U21,U22,U23,U26,U29,U30,U31},U27侦察航迹及其招标状态如图9(a)所示,绿色范围表示U27的通信邻域。 图9 t=54.23 s时UAV联盟针对目标T3的任务规划结果 构建任务联盟Uallocation={U10,U13,U18,U19,U21,U22,U23,U26,U27,U29}执行对目标T3的打击和评估任务,此时环境中出现多个动态威胁,联盟执行任务过程中需对所有的动态威胁和静态威胁进行规避,任务联盟的任务航迹、联盟UAV成员与目标之间距离分别如图9(a)和图9(b)所示,虚线威胁表示动态威胁。任务联盟中6架携带打击载荷的UAV〈U10,U13,U18,U19,U21,U22〉均从60°方向序贯依次打击目标,满足打击目标的5 s时间间隔,打击时刻分别为〈111.2 s,121.2 s,131.2 s,126.2 s,116.2 s,136.2 s〉。考虑到爆炸烟雾等的影响,评估任务时间约束为打击任务结束10 s后开始执行,〈U23,U26,U29〉从3个方向开始评估任务,持续时间均为20 s,从图9(b)可以看出,〈U23,U26,U29〉在满足时间约束的条件下于166.25 s完成对目标T2的评估任务。UAV联盟皆在满足其最大飞行航程的约束下完成对目标T3的察-打-评一体任务。 t=104.17 s时,此时潜在任务联盟成员为Upotential={U3,U5,U20,U31}无法满足目标T2的任务需求,无法构建任务联盟,此时由U32对目标T2进行持续封控监测并发布招标命令,等待任务联盟组建。t=142.28 s时,U32的潜在联盟成员为Upotential={U1,U2,U3,U4,U5,U6,U7,U9,U10,U12,U13,U14,U15,U16,U17,U20,U24,U27,U28,U30,U31},U32侦察航迹及其招标状态如图10(a)所示,组成任务联盟Uallocation={U1,U2,U3,U4,U7,U10,U12,U14,U15,U16,U24,U28,U32}执行对目标T2的打击和评估任务,由〈U2,U7,U10,U14,U15,U16〉执行打击任务,〈U1,U3,U4,U12,U24,U28〉执行评估任务,评估时长为15 s,联盟航迹及成员目标之间的距离分别如图10(b)和图10(c)所示。从图10中结果可知,联盟中的UAV能够在满足任务约束条件下到达目标,且为其规划的路径满足曲率连续和范围约束。 图10 t=142.28 s时UAV联盟针对目标T2的任务规划结果 由于引入通信距离约束和招标-投标任务联盟组建过程,相对于领域内所有UAV参与规划,任务规划过程的计算量得到一定程度的减少。针对3个目标的任务联盟规划的仿真耗时分别为0.45 s、0.4 s和0.72 s。图11显示了UAV群的任务顺序,每架UAV的飞行时间分为联盟等待时间、必要飞行时间和任务执行时间,根据任务类型,任务执行时间可分为侦察任务、打击任务和评估任务执行时间。 图11 UAV集群任务序列 联盟组建过程中的关键步骤为长机对投标信息选择执行任务的联盟成员的过程,基于本文的任务场景设计及分布式框架,仿真对比本文联盟组建方法与不考虑通信约束和联盟构建的集群全局优化方法、任务多项式时间联盟[23]构建方法性能。 仿真条件采用4.1节中设定的目标参数及UAV通信约束参数,每个目标需要不同次数的打击任务和评估任务,设置多组Monte Carlo仿真实验对比当UAV数量分别为24、32、40、48、56情况下的集群任务规划性能,初始时刻UAV散布在任务区域内,在未发现目标时执行侦察任务,使用不同联盟算法的任务分配效能和任务执行平均时间如图12所示。 图12 UAV数目变化时联盟组建算法性能对比 图12(a)为UAV数目变化时系统效能对比,图12(b)为联盟执行任务平均耗时对比,可以看出本文方法系统效能明显优于多项式时间联盟构建方法,但任务完成时间略长,这是由于多项式时间联盟构建方法在构建任务联盟时,以任务完成耗时最短为唯一指标。因此随着UAV数目增加,多项式时间联盟构建方法系统效能有下降趋势,这是由于多项式联盟组建方法随着UAV数目增加,邻域内UAV数目增加,但该方法不考虑的集群任务的协同效能,导致联盟代价增大,效能降低。同时由于全局优化方法在任务规划过程中不考虑集群通信结构约束,问题转换为当前场景下全部可用UAV节点的任务优化配置,仿真结果显示系统效能相对于本文方法任务完成时间减少,任务效能提升,但是此类情况下的任务规划不符合应用过程中的实际在线状态条件,且随着优化节点数据的增多,算法优化计算量增大,计算时间增长,因此全局优化方法不适合于动态场景下的在线任务规划方法,适合于全场景态势信息明确,全链路连通,对目标任务类型及约束想定,任务规划时间裕度大的任务预规划情况。综合比较可得,本文方法在动态任务规划过程中损失较少任务完成时间的前提下可获得较优的系统效能。 UAV集群执行任务过程中,任务效能还受集群内机间通信约束的影响,本节通过设置不同的通信距离Rmax和通信延迟裕度δt,考虑到随着通信距离的增加,机间通信时延Δtd增大,导致联盟潜在成员投标预估位置和预计任务完成时间ETA不同。采用本文任务规划方法考虑UAV在不同通信距离Rmax和通信延迟裕度δt时间约束下对集群任务效能的影响。 采用4.1节中仿真的仿真初始参数,UAV、目标以及环境的初始参数保持一致。分别设置UAV的通信距离rn分别为1 000 m、1 500 m、2 000 m、2 500 m 状态,对应的通信时延Δtd分别为0.2 s、2.0 s和3.5 s和5.5 s,联盟组建计算时间tTA为 0.5 s,通信延迟裕度δt分别为0.3 s、1.0 s和3.0 s。对联盟组建过程分析,并采用Monte Carlo仿真实验方法对比当UAV通信距离变化对动态联盟任务规划的效能影响,在相同参数配置下,进行50次仿真时延并对结果取平均值。集群的任务平均效能值随UAV的通信距离和通信延迟的影响如图13所示。 图13 通信约束对任务效能方法的影响 从图13中可以看出,当UAV的通信时延固定时,随着机间通信距离的增加,UAV集群执行任务效能持续增大,这是因为随着通信距离的增大,任务联盟的潜在联盟成员增加,联盟长机会获得更多的任务投标信息,在此基础上筛选得出集群最优任务执行序列和任务航迹,这表明更容易获得效能更优的任务联盟。然而随着通信半径的增加,当通信距离为2 500 m时,任务联盟总效能降低,这是因为随着通信距离的增大,通信延迟相应增加,联盟稳定的潜在成员数目减少,因此任务协同完成时间增加,协同性能降低,系统总效能降低。从图13中的结果同样表明随着机间通信距离的增大,即使通信延迟增加,也能保证任务联盟的组建和任务的执行。 为了进一步对本文方法进行验证,在仿真实验的基础上,进一步开展了相关的半实物仿真调试。由于飞控硬件数量的限制,采用虚实结合的方法,包括5套半实物仿真子系统和27套虚拟仿真子系统,各系统之间采用自组网数据链路实现联盟组建过程中的数据通信,通信链范围为1 500 m。半实物仿真实验布置如图14所示。 图14 虚实结合半实物仿真实验布置 32架机集群虚实结合半实物仿真流程如下: 1) 确定半实物UAV集群飞行原点经纬坐标为(105.044 327°,31.522 062°),将UAV集群航迹点结果从相对坐标系下进行坐标转换为经纬度坐标。 2) 32架机从初始位置出发,按照固定方向飞行,集群飞行轨迹按照6自由度模型模拟,当集群内有UAV发现目标时,通过自组网数据链与其邻域内的其与UAV进行联盟组建规划任务。 3) 联盟组建成功后,联盟内UAV上集群规划器进行动态航迹规划并装订,由机载飞控端机按照动态航迹飞行。 4) 将UAV飞行过程中的遥测信息(飞行信息、姿态信息)通过通信数据链路返回至动态推演视景仿真系统进行显示,虚实结合半实物仿真系统示意如图15所示。 图15 集群虚实结合半实物仿真系统示意图 采用4.1节仿真参数,半实物仿真UAV飞行速度为50 m/s和60 m/s,对4.1节仿真结果进行半实物仿真验证,为清晰展示验证效果,将4.1节仿真中围绕U1、U27和U32的3个联盟组建过程的集群飞行效果在动态推演视景仿真系统中的二维验证分别如图16(a)、图16(b)和图16(c)所示。 图16 半实物仿真飞行效果二维展示 从半实物仿真试验结果可以看出,本文所提出的联盟组建算法满足UAV集群飞行过程中动态任务需求,并生成引导UAV到任务终点位置的期望航线。UAV在跟踪动态航线执行多种任务过程中,能满足任务时空约束,在期望的时刻以期望的角度完成任务,充分说明了所提出算法的有效性。 本文提出了一种基于动态联盟策略的UAV集群在线任务规划方法,针对动态任务规划过程中的环境、通信拓扑和任务不确定等问题,建立了集群任务规划数学模型,设计了一种动态联盟组建策略,提出了耦合Dubins航迹规划的多子群蚁群任务规划方法,解决了多约束不确定场景下的UAV集群在线任务规划问题,并通过虚实结合的半实物仿真系统进行了验证。得出以下主要结论: 1)以UAV集群执行察打评一体的典型任务场景为例,仿真验证表明本文方法可以解决多不约束不确定场景的在线任务规划问题。对比分析得出本文方法优于多项式时间联盟构建方法的系统效能,稍差于全局优化方法,但全局优化方法不适合于动态场景下的在线任务规划问题。综合可得动态任务规划过程中本文方法可在损失较少任务完成时间的前提下可获得较优的系统效能。 2)通过仿真分析了在考虑通信距离和通信时间延迟约束的集群任务规划的效能,结果表明通过增大UAV的通信距离和减少通信时延,能够一定程度上增加系统任务效能。 3)通过虚实结合的半实物集群仿真验证了本文提出方法对UAV集群半实物模型具备良好的适应能力,对于后续研究工作进一步对于走向工程化应用具有一定指导意义。4 仿真与分析
4.1 UAV集群察-打-评任务典型场景仿真



4.2 典型任务联盟方法仿真对比
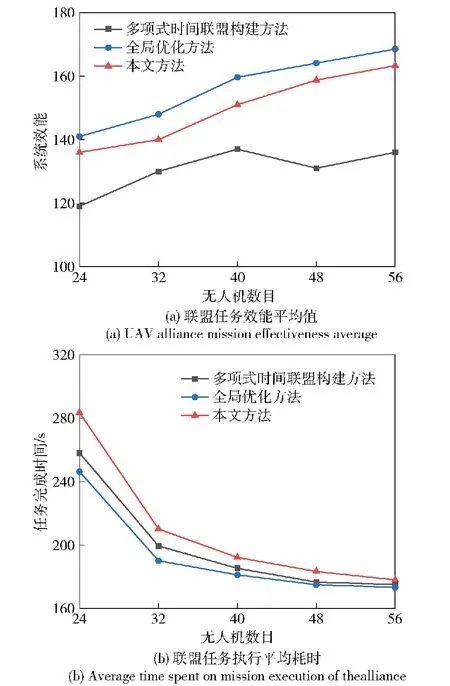
4.3 通信约束下的场景仿真
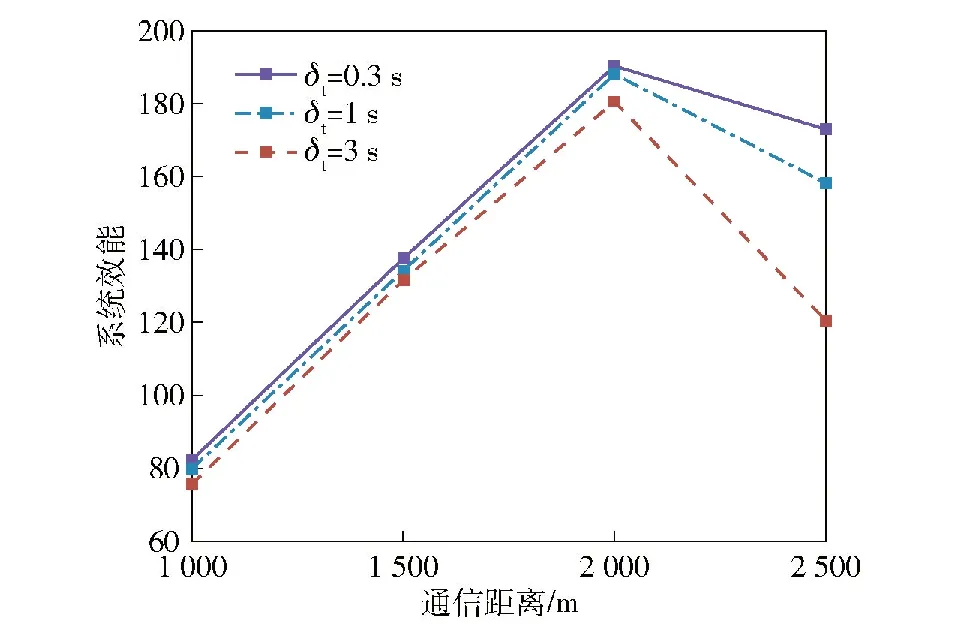
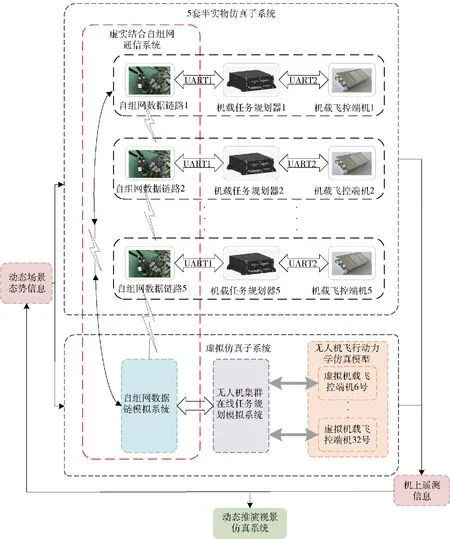
4.4 虚实结合的集群半实物仿真


5 结论