Modularity,reconfigurability,and autonomy for the future in spacecraft: A review
2023-09-05ZhiinZHANGXinhongLIYnynLIGngxunHUXunWANGGuohuiZHANGHichengTAO
Zhiin ZHANG, Xinhong LI, Ynyn LI, Gngxun HU, Xun WANG,Guohui ZHANG, Hicheng TAO
a Space Engineering University, Beijing 101416, China
b Department of Aerospace Science and Technology, Space Engineering University, Beijing 101416, China
KEYWORDS Autonomous;Deformable;Modular Reconfigurable Spacecraft (MRS);Modular Self-Reconfigurable Spacecraft (MSRS);On-Orbit Service (OOS);Self-reconfiguration
Abstract The shape of a spacecraft is transitioning from monolithic, manual, and static to modular, autonomous, and dynamic.Modular Reconfigurable Spacecrafts (MRSs) offer better solutions than traditional monolithic spacecrafts in several aspects, and may become the next generation of spacecraft systems with efficient design, fast deployment, flexible application, and convenient management.This paper reviews the development and technology of MRS from three aspects: Modularity, reconfigurability, and autonomy.Despite the progress of research on MRS,there is still a lack of unified standards and little understanding of related concepts.Based on the understanding of basic concepts, the studies conducted on MRS are reviewed to identify technical requirements and solutions.Aiming at the future development trend of MRS,a novel modular selfreconfigurable spacecraft,referred to as MagicSat,is proposed.Furthermore,the MagicSat system composition, advantages, and application prospects are studied.The enabling technologies and major challenges of MRS are further analyzed in terms of modularization,integrated management,and self-reconfiguration technologies.Finally, the future development trend of MRS technology is predicted, and corresponding suggestions are provided.
1.Introduction
Spacecrafts are being miniaturized and distributed, and contrastingly, becoming super-large and modular.1–2Owing to the low developmental costs,short cycles,and limited capabilities,microsatellites are prominently used in commercial spaceflights and large-scale constellation networking systems.The emergence of giant constellations such as Iridium and Starlink has caused a global wave of constructing mega-constellations.However, military reconnaissance, scientific exploration, and other application scenarios still require high-performance,super-large spacecraft,such as the International Space Station(ISS), James Webb Space Telescope (Webb), and space-based solar power plant.3–5The National Natural Science Foundation of China mentioned in the ‘‘Guide to the first major projects of the 14th Five-Year Plan”6that super-large spacecraft are important strategic space equipment for utilizing space resources,exploring the mysteries of the universe,and residing in orbit for long term in the future.The highly customized monolithic spacecraft design approach has high developmental costs and long developmental cycles,making it difficult to meet the requirement for mass deployment of microsatellites.Superlarge spacecraft cannot be built by launching a single rocket for orbital deployment due to the enormous weight and size of the structure.Therefore,this structure is built by employing modular designs, launching multiple rockets, and assembling modules on orbit, referred to as On-Orbit Assembly(OOA).7–8Another consequence of the traditional way of building a spacecraft is the obsolescence of technology.In traditional approaches, payload systems need to be integrated before being launched, rendering a fully developed payload technology that is 5 to 10 years old during launch.Considering the typical mission life of the payload as 15 years,the payload technology will be more than 25 years old, or may become obsolete by the end of the mission.9In summary, the traditional monolithic spacecraft can no longer meet the requirements of future aerospace development.Therefore, it is imperative and of great practical significance to exploring new spacecraft structure designs and deployment modes.
Research institutions are actively seeking to improve the reconfigurability of spacecraft systems,10thereby enhancing mission performance, and reducing mission costs.The rapid growth in the field of commercial spaceflights and advances in automation and robotics have piqued the interest of these institutions in developing software-defined satellites, Modular Reconfigurable Spacecraft (MRS), and on-orbit manufacturing11technologies to satisfy the abovementioned requirements.Software-defined satellites enable spacecraft to achieve reconfigurability through software definition,12–13and are considered the most efficient way to manage payload deprecation,but often have to accommodate redundant sets of components.MRS is assembled using different functional modules according to the task requirements, and the platform configuration and capability can be changed through hardware reconfiguration and software definition.The hardware reconfiguration is mainly completed by employing the On-Orbit Service (OOS)of space robots.On-orbit manufacturing utilizes additive manufacturing technologies such as 3D printing and automated composite layup for manufacturing, welding, and integrating spacecraft components on orbit, thereby establishing an orbital facility.14–15Although this is promising,many hurdles must be overcome before this technology can be implemented.
Currently, compared to the distant on-orbit 3D printing technology, MRS appears as the most promising technology.MRS enables software definition and OOA,and uses modular plug-and-play technology to achieve good reconfigurability.It has advantages in design, manufacturing, deployment, and application efficiency because of its standardization, reconfigurability, and OOS-oriented characteristics.16Specifically,MRS offers several advantages over monolithic spacecraft,such as:17–18
(1) Standardized modules reduce costs and facilitate costefficient mass production.
(2) The life expectancy of spacecraft increases because of module replacements and upgrades.Furthermore, they can be repaired more easily, and standardized module interfaces greatly simplify OOS.
(3) The combination of modules greatly simplifies the design of the complete satellite system and shortens the production and development cycles.
The future of MRS is Modular Self-Reconfigurable Spacecraft (MSRS) with on-orbit autonomy.The reconfiguration method of MRS is progressing from manual to on-orbit autonomous reconfiguration,thereby further improving the speed of spacecraft deployment, maintenance, and upgrade, and enhancing the ability to handle emergency tasks.With the continuous development of autonomous technology, on-orbit autonomous assembly and reconfiguration of MRS will be the new considerations for future development.17,19–20.
Currently, we are at an inflection point for self-aware,autonomous control of spacecraft.Whether we can free spacecraft from its monomer, manual, and static design and enable the development of a modular, autonomous, and dynamic spacecraft that can ‘‘grow”and evolve throughout a mission is an important question.Despite the progress in the research of MRS and space robotics,MRS systems are not prominently employed in the application fields that may benefit the most,such as space exploration, development, and utilization.This paper summarizes and reports on the analysis of the research progress of MRS systems and proposes an MSRS, referred to as MagicSat.The aim of the MagicSat project is to realize a class of flexible, reconfigurable, and deformable multifunctional self-organizing spacecraft,and to provide a novel design for MSRS with manipulators as inter-module linkers.Subsequently, the application scenarios and methods of MRS are explored to guide the future development of the system in terms of on-orbit applications.Finally, the enabling technologies of MRS are analyzed and corresponding recommendations are presented.
The remainder of this paper is organized as follows.Section 2 includes a summary of fundamental concepts and terminologies for MRS.Section 3 reports on the surveys and analyses conducted on the developmental status of MRS for generic and specific tasks.Section 4 describes the concepts and design of the MagicSat.Section 5 introduces the application scenarios and spectrum of MRS.Section 6 presents a detailed demonstration of the enabling technologies of MRS in terms of the three aspects:modular technologies,integrated management technologies, and self-reconfigurable technologies; furthermore, this section highlights the technical challenges.Section 7 provides suggestions for the future development of MRS, and Section 8 concludes this study.
2.Fundamental concepts and terminologies
MRS is an emerging concept, and therefore, lacks a clear definition.To understand the functionalities and limitations of the system, we first define the basic concepts of the MRS system,as shown in Fig.1.This list of basic concepts is based on relevant definitions and descriptions of Modular Reconfigurable Robots (MRR).
2.1.Modularity
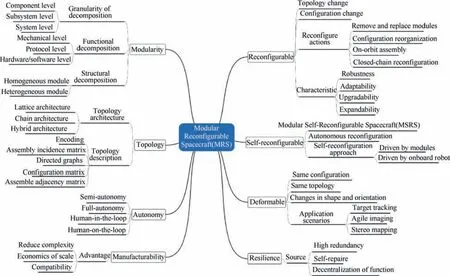
Fig.1 List of basic concepts and terms of MRS.
Generally,modularity refers to the extent to which the components of a system can be separated and reorganized to achieve flexibility and versatility during their use.Modularity reduces complexity by decomposing a system into different levels of mutually independent parts and ‘‘hiding the complexity of each part behind abstractions and interfaces.”21–22In modular spacecraft technology, modularity refers to the process,wherein a system comprising a set of standardized components with independent functions is mass-manufactured,linking subsystems with other components via standardized interfaces,and subsequently, constructing spacecraft by combining smaller subsystems.From the granularity of decomposition, the degree of modularity from high to low can be divided into three levels:component,subsystem,and system levels.23From the perspective of functional decomposition, modularization can be classified into mechanical,protocol,and hardware/software levels.24From the perspective of function and structure,modules can be divided into homogeneous and heterogeneous modules.25.
Modularity must include interface standardization and plug-and-play principles to enable modules to exchange data and power in a distributed and self-configuring architecture.24This architecture is highly flexible because of the specification of standardized interfaces between components, which further allows for self-assembly, self-reconfiguration, and selfadaptation of MRS.26.
2.2.Topology
Topology describes the intrinsic connectivity of abstract objects, ignoring their detailed form.27–28MRS is a typical multibody system; the topology characterizes the relationship between modules,which should be unique.A unique topology of a system is called a configuration.A modular spacecraft can be assembled using various possible configurations and are reconfigurable; therefore, it is necessary to mathematically describe the information and characteristics of a system topology to facilitate the modeling,analysis,and control of the system.However, different configurations of MRS might exhibit the same topology,and thus,reflect the same kinetic equations.
According to different connection modes, MRS can be divided into three common topology architectures: lattice,chain, and hybrid architectures.29–30Chain architecture includes linear, circular, and branching chains.The basic difference between a hybrid or chain architecture and a lattice architecture is that there are fewer connector planes between modules in a hybrid or chain architecture than those in a lattice architecture.In other words, these connector planes are located in non-lattice locations.31.
2.3.Reconfigurable
The term ‘‘reconfigurable”refers to the ability of a system to change its configuration, including the physical connections between hardware modules, installations and adaptations of software packages, and changes in its functions.10Reconfigurable systems can adapt to the changing requirements by recombining their configurations and capabilities and satisfying the requirements of the mission.The prerequisite for reconfigurability is to achieve modularity and subsequently change the structure and functionality of a system by changing the topological relationships between modules.Reconfiguration involves actions such as separation and docking between modules, and therefore, leads to changes in system topology.
Based on various purposes, reconfiguration can be divided into four categories: remove and replace modules, configuration reorganization, OOA, and closed-chain reconfiguration.Closed-chain reconfiguration refers to a system consisting of a series of kinematic chains (open or closed) that meet at common branch points to form complex configurations.32The closed-chain reconfiguration does not change the number of modules but reduces the Degree Of Freedom (DOF) of a system, thereby improving the system stability.
Therefore, a reconfigurable system exhibits the following characteristics:
(1) Robustness: In the event of a local module failure, the failed module can be replaced with a spare module via on-orbit reconfiguration to achieve self-repair.
(2) Adaptability: According to different task requirements,multiple functional modules in the original configuration can be reorganized into the most appropriate configurations to achieve configuration recombination.
(3) Upgradability: The performance of a system can be improved by replacing the modules of the original system with the latest and best functional modules to ensure the timeliness of the payload.
(4) Expandability: The size and functionality of the system can be willingly expanded, and is suitable for OOA of ultra-large spacecraft.
2.4.Deformable
The term ‘‘deformable”means that a system can change its shape in the same configuration, while the topology remains the same.Unlike the concept of reconfigurability,the deformability concept focuses on changing the relative attitude between modules, but not the connectivity.Deformation changes the orientation of modules, which can be used in task scenarios such as target tracking, agile imaging, and stereo mapping.The usual deformation operations are the deployment of the solar wing, bending of the manipulator, and rotation of the module under the connector.33.
2.5.Autonomy
Autonomy is defined as the extent to which a system can perform its processes and operations without external control.34A more specific definition is that autonomy is the extent to which a robot can sense the environment,plan based on that environment,and act upon that environment with the intent of reaching a certain goal without external control.Human–machine systems are changing from automated to autonomous systems.35Automated systems perform tasks according to predefined procedures without environmental awareness and autonomous decision-making capabilities,whereas an autonomous system independently completes the dynamic process of‘‘Observe-Orient-Decide-Act”(OODA) according to the task requirements, as shown in Fig.2.36Autonomy levels can be classified as semi-autonomous and fully autonomous.According to the interaction between machines and humans, autonomy can be divided into Human-In-The-Loop (HITL) and Human-On-The-Loop (HOTL).37HITL semi-autonomous systems refer to humans as part of the system, participating in control and decision-making.Currently, most systems belong to this category.If a system can perform a function independently, with humans only monitoring or acting in a supervisory role, such a system is called a fully autonomous system with HOTL.
2.6.Self-reconfigurable
Self-reconfigurable means that a system uses its control system to perform reconfiguration operations autonomously without external participation.According to different assembly methods, the reconfiguration technology of a modular spacecraft can be divided into the following:
(1) Manual reconfiguration by astronauts using the assembly assistant.
(2) Reconfiguration by remote-controlled space robots(HITL).
(3) Autonomous reconfiguration by space robots,38as shown in Fig.3.Space autonomous robots include onboard robots, free-flying assembly agents, and persistent assembly platforms.39
Modular spacecraft can be divided into MRS and MSRS based on autonomy.Currently, MSRS mainly features two modes of self-reconfiguration.First, the component modules possess independent movement capabilities and can be rearranged into various configurations.Second, the system performs complete self-reconfiguration by employing onboard robots.The self-reconfiguration of the system not only involves the hardware level,but also requires a software framework that matches the modularity, communication between modules, perception and recognition technologies, intelligent planning and controlling algorithms, and other key technologies.40
2.7.Resilience
Resilience is the ability of a system to recover its original capacity in the face of damage or disturbance, and is referred to as system robustness.Modularity often implies highly redundant and resilient systems, as several interchangeable modules are available.Reconfigurability increases the selfrepair capacity of a system by employing redundant modules.A system can be further recovered by deforming when required.These two properties combine to produce robustness.Furthermore, as modular systems are functionally decentralized, individual modules have a limited impact on the overall system performance.Therefore, the failure of a module is not catastrophic and only leads to a gradual decrease in the system capacity.High resilience and upgradability ensure the continued or long-term presence of a space system and its required capabilities and operations.
2.8.Manufacturability
The term ‘‘manufacturability”describes how efficiently a product can be manufactured based on its design, cost, and production needs.Modularity is often considered an enabler for spacecraft manufacturing and assembly, making manufacturing easier and cheaper by reducing the number of operations on individual parts and simplifying the manufacturing process.Furthermore,decomposing large systems into separate,simple modules reduces the complexity of a structure.Repetitive modules reduce the number of operations with structures of considerable complexity, allowing better exploitation of the economics of scale.This improves the component quality in bigger batches,lowers the module costs,and makes them more forward-compatible and changeable in the development effort.

Fig.2 OODA loop structure.36

Fig.3 Classification of autonomous reconfiguration technology.
3.Survey and analysis of developmental status of MRS
Modular reconfigurable robotic systems have been widely studied and are being used in space fields such as planetary exploration and orbital services, including modular robotic system,41and Superbot robotic system.42In this review, we focus on MRS designed specifically for space explorations and applications.Certain MRS systems may include robotic arms,but the modularity and reconfigurability of robotic arms are not the focus of this study.OOS missions such as Mission Extension Vehicle (MEV),43NASA’s Commercial Resupply Service for the International Space Station,44ESA’s Remove-DEBRIS mission,45–46and DARPA’s Robotic Servicing of Geosynchronous Satellites (RSGS)47have been realized.48These missions were designed for conventional spacecraft and did not employ dynamic modularity.However, they provided valuable implications for on-orbit reconfiguration operations of MRS.
Since the beginning of the 21st century, Japan, Germany,the United States,and other countries have conducted research on MRS, and the development history is shown in Fig.4.In 2003, the University of Tokyo and other institutions in Japan funded the PETSAT project to explore a new satellite concept consisting of modular, functional, and plug-in panels.49In 2005, the University of Tokyo reintroduced the concept of the Reconfigurable Space System(RSS),consisting of a Cellular satellite (CellSats) and on-orbit servicing robots.50The launch of the German project Intelligent Building Blocks for In-Orbit Satellite Servicing and Assembly (iBOSS) that occurred in 2010 was aimed at developing a new modular spacecraft concept that enabled OOS and OOA to be reconfigured and expanded separately.DARPA has been funding research on the use of cellular satellites to assemble MRS via the Phoenix program since 2012, and has developed a lowcost, modular, highly integrated Hyper-Integrated Satlet(HISat), which has undergone several in-orbital tests hitherto.Many projects have modularized certain components, such as ROSE51–52and Modular Assembled Space Telescope(MAST),which are at low levels of modularity, and therefore, are not detailed here.
3.1.MRS for general tasks
3.1.1.PETSAT
Japan started funding the five-year panel extension satellite(PETSAT) project in 2003.PETSAT is a new satellite design concept that modularizes the typical subsystems of a typical satellite into basic functional panels that are linked together using a reliable plug-in connection mechanism,thereby providing the entire integrated system with complete satellite functionality.53The flexibility of task requirements is achieved by combining any number and configuration of different panel types.Various modular configurations of the PETSAT satellite are shown in Fig.5.PETSAT is characterized by multi-tasking and mass production, which not only reduces costs, but also increases system reliability.Mass production of panels is the key to reducing costs and increasing reliability; however, in traditional satellite concepts, mass production is difficult even at the subsystem level due to the diversity of mission requirements.SOHLA-2 is the realization of the PETSAT concept consisting of six panels:54bus function(BUSF-P),communication (COMM-P), attitude control (ACS-P), propulsion(PROP-P), mission (MISN-P), and experiment (EXP-P), as illustrated in Fig.6.

Fig.5 Various modular configurations of PETSAT satellite.53
3.1.2.CellSat
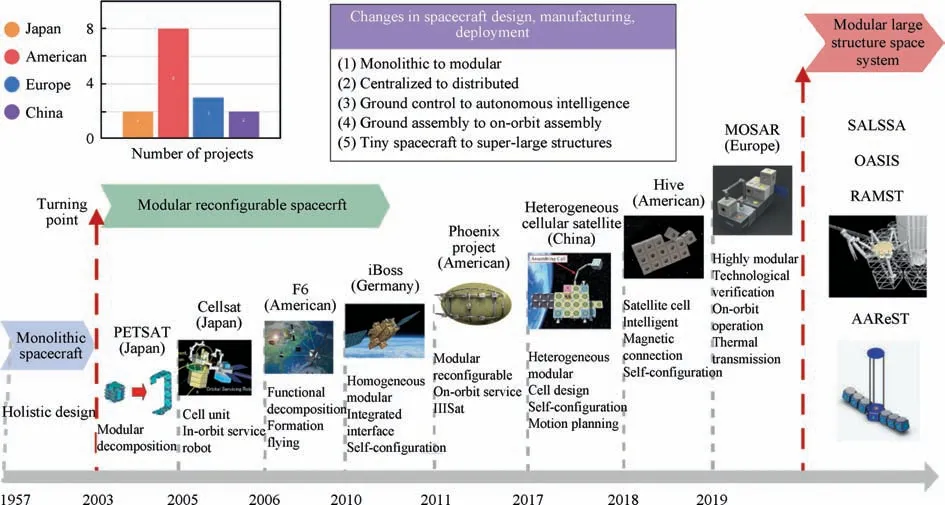
Fig.4 Typical representatives of development of MRS.

Fig.6 SOHLA-2 configuration.54
In 2006,the concept of RSS was proposed by the University of Tokyo.55The RSS consists of reconfigurable cellular satellites(CellSats), which are working units providing services such as remote sensing and communication, and Orbital Servicing Robots (OSRs), providing maintenance services such as satellite assembly, disassembly, refueling, and reconfiguration, as shown in Fig.7.The CellSats comprise multiple cubic-cell building blocks, and a reasonable number and type of cells are assembled to develop an integrated satellite with a reconfigurable architecture.These cells are smaller than conventional modules owing to segmented functions.The cellular design offers greater flexibility, with clear cell boundaries and a robot-friendly interface that features an increased number of configuration options than that available in traditional modular satellites.The RSS regularly replenishes satellite fuel and upgrades equipment and configurations by responding instantly to user needs, realizing flexibility, sustainability,and reusability.
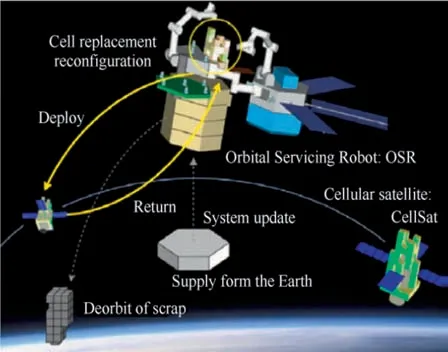
Fig.7 Schematic of RSS.55
Tanaka et al.fabricated a structural prototype model for RSS, verified its feasibility by conducting prototype development and assembly experiments, and finally, developed a precision assembly for autonomous space robots.56The cells of CellSats are cubes with a side length of 60 mm, containing devices and circuits in line with their respective functions, as shown in Fig.8.Each surface has the same structure and interface that mechanically connects to other cells,such that there is no need to distinguish directions during its operation.OSR performs operations such as insertion and rotation via connector plugs,while completing the power supply and communication connection between cells.
3.1.3.F6
In 2009, the U.S.DARPA proposed F6 project to conduct technical research, development, and demonstration of the separation module concept.57The aim of the F6 project was to replace traditional, highly integrated, monolithic satellites with wireless network clusters of heterogeneous modules containing various payloads and infrastructure functions.The F6 project optimally decomposed the mission payload,energy,communication, navigation, computational processing, and other functional systems of the spacecraft into multiple modules,each assigned to perform different functions or resources related to space missions (Fig.958).The modules adopted physical separation, constellation free flight, wireless information exchange, and wireless energy exchange to achieve functional coordination and resource sharing, and they formed a virtual large satellite to complete specific tasks.This separated configuration performed mission capabilities comparable to or greater than that of monolithic satellites,but with significantly enhanced flexibility and robustness.In May 2013, DARPA announced the cancellation of the F6 program,59but the upfront investment was not wasted.The relevant technologies and experiments of the F6 system have laid the technical foundation for the subsequent development of MRS that can be used for OOS, especially for the development of the Phoenix Program.60
3.1.4.SWARM
In 2006, MIT proposed the concept of Self-assembling Wireless Autonomous Reconfigurable Modules (SWARM).SWARM divides the functions of the space system into a set of distinct functional modules, avoiding substantial upfront design costs,increasing the flexibility of system reconfiguration and convenience of OOS,and reducing system risks.The modules use wireless communication, which minimizes the hardware interfaces between subsystems, and the remaining structural interfaces are standardized and autonomous.61These modules can be reconfigured to perform a wide variety of tasks.The number and type of modules are determined according to the specific requirements of the mission or payload to perform the functions of a large integrated system.MIT has built a set of prototype modules,as shown in Fig.10,and has completed structural,electrical,data transfer,and general performance tests.

Fig.8 Cell and end effector prototype.56

Fig.9 Concept of F6 system.58
The CellSat and F6 concepts received widespread attention,and the United States and Europe initiated collaborative projects to develop OOS and MRS.The German Aerospace Center (DLR) and DARPA have conducted the iBOSS program and Phoenix project, respectively.
3.1.5.iBOSS
In 2010, Germany launched the intelligent building blocks for on-orbit satellite servicing (iBOSS) project with the aim to develop a new modular spacecraft concept that enables OOS and OOA to be reconfigured and expanded, respectively, as shown in Fig.11.62–63The project focused on four key elements:modules comprising structural and functional elements,intelligent Space System Interface(iSSI),intelligent Computer-Aided Satellite Design (iCASD), and Virtual Testbed iBOSS(VTi).64Operability and achievability are critical for OOS systems, and were the main principles adopted by DLR in conducting research for this project.
Considering these critical factors, full modular satellite architecture with OOS capability was developed within the iBOSS project.The main concept subdivides the common satellite bus on a component level and integrates these components or even full subsystems into standardized cubic shaped building blocks, referred to as iBLOCKs.65The iBLOCKs are cubes with a side length of 400 mm that can accommodate almost any platform subsystem.Each building block contains specific functions and is designed to reduce the complexity,mass,and volume,and provides a robot-friendly interface that supports OOA and reconfiguration.The iBOSS catalogue offers a range of standardized and verified iBLOCKs for all types of envisaged mission profiles,orbits,and lifetimes in different quality classes,and these blocks possess different performance parameters of the integrated components.The iSSI is the main component of the system for interconnecting modules and enabling OOS as envisioned.66This highly integrated multifunctional interface provides mechanical and thermal coupling along with power and data transfers.

Fig.10 SWARM prototype (contains two propulsion modules and one attitude control module).61

Fig.11 iBOSS concept (intelligent building blocks for on-orbit satellite servicing and assembly).62,63
With prequalified off-the-shelf building blocks connected via the iSSI,realizing cost-efficient,rapid on-demand development of iBOSS-based satellites (iSATs), and other flexible space systems becomes possible.To perform an assessment of the proposed approach for modular satellite systems,iBOSS-based reference satellite iSAT was designed, which allows a comparative analysis with existing state-of-the-art satellites in terms of the important parameters such as size and mass.The iSAT consists of a central structure and 22 iBOSS building blocks, as shown in Fig.12.
So Trusty John spoke: I am unjustly condemned, for I have always been faithful to you ; and he proceeded to relate how he had heard the ravens conversation on the sea, and how he had to do all he did in order to save his master
Currently, MRS is mainly assembled on the ground.For using space robots, the OOS spacecraft and MRS are the two major technology directions that are being developed simultaneously.Employing the OOS spacecraft as a prerequisite for the realization of MRS is gaining momentum.
3.1.6.Phoenix project
DARPA announced the Phoenix project in 2011, which was aimed to develop and demonstrate joint recovery technology that reused valuable components (such as large-aperture antennas) of GEO satellites that have been retired or at their end-of-life to develop new spacecraft,thereby reducing the cost and risk of developing new space equipment.67–68The basic procedure of the Phoenix is illustrated in Fig.13.69DARPA proposed a cellular Satlet as the basic unit of the satellite architecture to develop a highly integrated modular satellite and subsequently reuse and integrate the antenna of the failed satellite to develop a new satellite.Each Satlet module provides partial functionality, and the combination of hardware and software yields the full capability required by the spacecraft.70.

Fig.12 Reference mission iSAT.64

Fig.13 Phoenix GEO technologies and demonstration overview.68–69
In FY 2015 budget of DARPA, the Phoenix project was split into two projects:new Phoenix and geostationary satellite robot service (RSGS) projects.The new Phoenix project only retained the early stage of the original Phoenix project and was dedicated to researching MRS.71–72RSGS was based on the later stage and an expansion of the original Phoenix project, which was aimed to develop OOS spacecraft.The tools and technologies of the Phoenix Program were used in the RSGS mission, which was designed to provide a wide range of services to the commercial and military satellite operators to extend the life of existing satellites.After the split, the two projects aim to develop OOS and MRSs,which are more conducive to project management and centralizing resources to promote the development of these two technologies.

Fig.14 Concept of HISat(capable of conforming to any size or shape on-orbit system).74
DARPA started funding research to assemble MRS from Satlet through the Phoenix project in 2012.NovaWurks developed a low-cost, modular, highly integrated HISat for Phoenix, which was based on Satlet technology.73The HISat is the core building block of new satellite architecture with the functional capabilities of a conventional spacecraft.Multiple HISats of similar shapes and sizes are flexibly assembled on demand to develop an MRS (Fig.14).74The Phoenix project has conducted several experiments to verify the feasibility of HISat integration technology.From the late 2015 to 2017,NASA astronauts manually assembled the satellite SIMPL75that comprised six HISat,eight modules,and two solar arrays,on the ISS and conducted on-orbit tests, as shown in Fig.15.In March 2018,the Payload On-orbit Delivery Satellite(PODSat) consisting of four HISats was boarded on a communication satellite and launched into orbit to validate the feasibility of the cellular satellite platform to accommodate new supplementary Satlet modules and provide experimental data.In December 2018, the experiment for cellular integration technologies (eXCITe) composed of 14 HISats entered the sun-synchronous orbit for the third on-orbit test to verify the compatibility of the cellular architecture with payloads.
3.1.7.Flux-pinning interactions
The electromagnetic connection technology derived from the field of modular robotics is another strategy proposed for OOA and MRS,wherein the flux-pinning interactions between a High-Temperature Superconductor (HTSC) and a magnet create a contactless connection between the components.The flux-pinning interaction is passively stable with multiple DOF.76The air-core Electromagnets (EM) can be used to actuate reconfiguration by pivoting neighboring spacecraft relative to each other via repulsion (pivot actuation) and attraction(hinge formation).The concept of modular spacecraft selfassembly using flux-pinning interactions to form contactless hinges has been successfully demonstrated in twodimensional experimental studies on air bearing tables.77Furthermore, EM actuators have been successfully employed in pivoting mechanisms,78controlled formation flight,79and docking between neighboring spacecraft.80

Fig.15 SIMPL (comprised eight modules, six HISats, and two solar arrays).75

Fig.16 Cubic spacecraft based on PocketQube.83
3.1.8.Hive
In February 2018, the Aerospace Corporation announced to study the feasibility of on-orbit self-assembly of the intelligent unit to develop various spacecraft platforms through the Hive project.84The building blocks of Hive are a group of small,smart, mass-produced, and versatile satellite units that can be linked to other units to transmit power,data,and heat.Similar to the methods of dismantling and rebuilding Lego blocks,the Hive blocks can be disassembled and reconfigured when necessary, allowing the formation of a constellation of elastic satellites in space (Fig.17).Each unit can rotate on one face while being attached to other units, and can mount on other units or detach when necessary.A huge advantage of Hive is that it can change its configuration to suit and perform various tasks.For example, Hive can be used as a large and reconfigurable optical telescope that performs different functions by moving key components.
3.1.9.MOSAR

Fig.17 Hive units could assemble into different configurations in space.84
In March 2019, the European Commission funded the Modular Spacecraft Assembly and Reconfiguration demonstrator(MOSAR) project within the H2020 program with the aim to complete the technical demonstration of in-orbit modular and reconfigurable satellites.Furthermore, this project was committed to integrating and demonstrating the technologies that could radically transform future satellite design and deployment patterns.The notional scenario of the MOSAR project is illustrated in Fig.18.A Servicer spacecraft (SVC)carrying a cargo of Spacecraft Modules (SM) and dedicated Walking Manipulator(WM) executes a rendezvous and docking with a Target spacecraft(TGT)bus,and subsequently,performs a series of activities including module transfer from and to the TGT.85–86MOSAR demonstration scenarios include the transfer of SM, replacement of damaged modules, and heat transfer experiments.The innovation of MOSAR lies in the elaboration and refinement of the concept of modular spacecraft, creating a demonstrator of modular space applications by integrating the power of space industry players such as satellite manufacturers and commercial companies.The MOSAR project increases the modularity of space systems by an order of magnitude compared to the current space industry standards.This represents the beginning of a new era in space missions, wherein an entire spacecraft can be optimized to meet the mission demands more efficiently and dynamically.
3.1.10.Heterogeneous cellular satellite
Northwestern Polytechnic University (NWPU) proposed the concept of heterogeneous cellular satellite, analyzed the composition, design principles, and cell types of space cellular robots,and subsequently,developed cell prototypes.87A cellular satellite comprises many types of unit cells(Fig.19),which can be divided into two categories.First category is the basic unit, which comprises strict cubes with six identical faces.Although similar in appearance,these cells may have different intrinsic functions, including controller cells, computing cells,and navigation cells.Second category comprises special cells such as thruster cells, communication cells, and solar panel cells.Cellularization enables low-cost, rapid-response spacecraft development.During the design phase,functional adjustments can be achieved by tweaking the structure and configuration of cells, rather than starting over.
In the cellular satellite developed by NWPU,an assembling cell was designed to move or manipulate the unit cells.The assembling cell is a specially designed symmetrical robotic arm with a standard interface at each end.Three typical motion patterns of the assembling cells are shown in Fig.20.Since the advent of cellular satellite research,most studies have focused on the prototyping of cells, and limited research has been conducted on on-orbit self-reconfiguration strategies,algorithms, and techniques.NWPU further studied the selfreconfiguration planning strategy,87inertial parameter identification,88and distributed control assignment algorithm of cellular satellites.89

Fig.18 MOSAR demonstrator setup.85

Fig.19 Heterogeneous cellular satellite developed by NWPU.87

Fig.20 Three typical motion patterns of assembling cells.87
3.1.11.ElectroVoxels
MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) has developed electromagnetically actuated pivoting for scalable modular self-reconfigurable robots(ElectroVoxels), which do not require motors or propellants to drive and can operate in microgravity, as shown in Fig.21.90–91Scientists embedded small, easily manufactured,inexpensive electromagnets into the edges of the cubes that repel and attract,allowing the robots to spin and move around each other and rapidly change shape.The ElectroVoxels have a side length of about 60 mm, and the magnets consist of ferrite core wrapped with copper wire, totaling a whopping cost of just 60 cents.Inside each cube are tiny printed circuit boards and electronics that send current through the right electromagnet in the right direction.Unlike traditional hinges, which require a mechanical connection between two components,ElectroVoxels is completely wireless, avoiding the usual stuffing of bulky and expensive actuators into individual blocks.
The researchers designed a software planner to visualize the reconfiguration and calculate the underlying electromagnetic distribution, controlling thousands of cubes to move, rotate,and assemble in a simple operation.This research demonstrates how electromagnetically actuated pivoting cubes are simple to build, operate, and maintain, enabling a flexible,modular and reconfigurable system that can serve as an inspiration to design intelligent components of future exploration missions.
3.2.MRS for specific tasks
In addition to the above-mentioned research on MRS for general tasks, various research institutions have focused on the research on MRS for specific tasks, especially the modular assembly task of large space structures.
3.2.1.AAReST
The Surrey Space Center (SSC), California Institute of Technology (Caltech), and the Indian Institute of Space Science and Technology have collaborated on a concept for multiaperture space telescope built using autonomous reconfigurable spacecraft elements.When these elements are docked together, they can synthesize a large aperture with length greater than 20 m by using adaptive optics.To demonstrate the concept, a pre-cursor mission (AAReST) has been developed (Fig.22), comprising seven nanosatellites and a central hexagonal primary mirror satellite, carrying the focal plane assembly, along with six additional ‘‘mirror-crafts”capable of un-docking and autonomously re-docking to transform into a reconfigurable multi-aperture telescope.92

Fig.22 AAReST model with a CubeSat-assembled compact telescope (left) and a high-resolution sparse-aperture telescope(right).92
The AAReST mission is focused on demonstrating the hardware and technology required to autonomously assemble reconfigurable space telescopes on orbit.The University of Surrey is responsible for spacecraft bus technology, including guidance and propulsion, whereas Caltech is responsible for mission planning and adaptive optics.Both universities are working on autonomous maneuvering/docking systems.This mission involves two nanosatellites in 3U CubeSats-type structures(MirrorSats),each carrying a deformable mirror payload and central 15U microsatellite(CoreSat).By employing autonomous optical sensing and electromagnetic force, multiaperture telescopes of different shapes are developed.This is achievable by constructing different arrays between two MirrorSats and between a CoreSat and MirrorSats by using the docking and rendezvous processes.The overall reconfiguration of the satellite is illustrated in Fig.23.93–94
3.2.2.SALSSA
In FY 2015,NASA sponsored a study to investigate and define the technologies required for the Space Assembly of Large Structural Systems Architecture (SALSSA).The objective of SALSSA was to develop technologies for the automated assembly of large modular structural systems in space,enabling these systems to be serviced,refurbished,or reconfigured to extend their lifespan or make them available for new missions.This new integrated space assembly paradigm is expected to improve the spacecraft performance while reducing costs and risks for future missions.95This new paradigm simultaneously includes the spacecraft or space system architecture,assembly operations,infrastructure for robotic services and assembly, new structural concepts, and structural joining methods.The research started with a review of existing NASA mission architecture studies,space science decadal surveys,and technology area roadmaps, followed by the selection of three target applications to reflect the desired NASA mission capabilities that may best be delivered by applying the SALSSA technique.These focus applications include a megawatt-class solar electric tug,96a next-generation space telescope with a nominal diameter of 20 m(main aperture),97and the evolvable mars campaign spacecraft systems.98
3.2.3.OASIS
DARPA proposed a program in FY 2016 for Optical Aperture Self-assembly In Space (OASIS), which planned to study the assembly of optical telescopes with apertures greater than 5 m via autonomous rendezvous and docking of small modules.71,99–100The program involved a scaled zero-g demonstration of a working optical system that used at least one segmented optical surface and maintained the required accuracy and large-scale physical stability.The technological problems of precision mechanical assembly from modular components, multiple item rendezvous and connections in space, and active surface measurements, compensation, and control were addressed in this program.Without the required measurement devices and support equipment, module assembly in space was inherently more challenging than groundbased operations because the module components and systems must be capable of self-measurement and calibration.The project was planned to curtail the launch size limitations of existing or planned space vehicles,and promote innovative leapfrog development of space surveillance and communication payload capabilities.In 2016, OASIS completed the system requirements and preliminary design review,and subsequently,DARPA stopped requesting financial aid for the project.
3.2.4.RAMST

Fig.23 Reconfigurable satellites of AAReST mission.93–94
In 2016, Caltech and Jet Propulsion Laboratory (JPL)proposed the structure and conceptual design of a Robotically Assembled Modular Space Telescope (RAMST), thereby realizing the idea of a large space telescope with a diameter of 100 m.101The main mirror of RAMST adopts a modular and deployable structure design, including a layer of identical hexagonal deployable truss modules with each layer supporting a mirror module containing multiple mirror segments, as shown in Fig.24.102A Hexbot is used to deploy and assemble truss modules, attach mirror modules to the assembled truss,and remain on the telescope to perform maintenance tasks throughout the life of the telescope, such as replacing individual mirror segments or electronic components(Fig.25102).The Hexbot is equipped with a six-legged manipulator, four of which are used to move across the truss, whereas the other two legs are used to secure the transport module.When not in operation, the Hexbot remains attached to the center of the primary mirror, awaiting future repair tasks.The distinguishing features of the RAMST architecture, compared with those of prior concepts, include the use of a modular deployable structure, a general-purpose robot, and advanced metrology unit, with the option of formation flying.To demonstrate the feasibility of the robotic assembly concept, a reference design was proposed to assemble a formation-flying telescope with a diameter of 100 m in Earth orbit, using the RAMST architecture and operating at Sun-Earth Lagrange point 2.The main mirror, optics and instrumentation unit, metrology unit, and parasols flying in formation are shown in Fig.26.102
3.3.Analysis and comparison
Table 1 lists the summary of the development of MRS, which can be used to compare the basic concepts employed in various projects.Among the various space application concepts for MRS that have been proposed hitherto, a majority of them are still in the stages of defining system concepts and program designs, conducting preliminary research on some key technologies,and a few are in the stages of demonstration and verification of key technologies.In general, the design and concept of MRS lack pertinence, do not combine the characteristics of the space environment and mission requirements,and lack systematic and in-depth research on its organizational structure and operational modes.

Fig.24 Primary mirror assembly phases of RAMST.102

Fig.25 Hexbot motion sequence of RAMST.102
From the perspective of modularity,current modular architectures are mostly not applicable outside laboratories,and the practicality of modular systems still faces significant challenges.MRS for general tasks is primarily designed with homogeneous modules, which have the advantages of good interchangeability and low manufacturing and maintenance costs; however, they lack the versatility to perform useful tasks.MRS for specific tasks mostly adopts a heterogeneous module design,which has the advantages of outstanding module functions, while increasing the complexity of autonomy and self-reconfiguration.The components such as solar panels,communication antennas,and propellant tanks are often difficult to integrate into homogeneous modules,thereby requiring the modular systems to be heterogeneous in form and function.Therefore, a hybrid structure containing both homogeneous and heterogeneous modules would be an effective approach.
From the perspective of topology, a hybrid topology can serve various potential tasks and is the most forward-looking and practical among others.The chain structure exhibits higher flexibility and promotes the deformability of the system.The lattice structure exhibits higher structural stability and facilitates the self-reconfiguration of large spacecraft.A hybrid topology combines the advantages of chain and lattice structures.The lattice structure provides higher structural stability and facilitates the OOA of large spacecraft.
From the perspective of reconfigurability, an autonomous reconfiguration in orbit is an inevitable trend for future development.Intelligent self-reconfiguration is more flexible,efficient,and faster than assisted reconfiguration by employing on-orbit robots or astronauts.An MRS is a typical multibody system with natural dispersion.The decentralized hardware and software architecture is beneficial for the system;however,it causes difficulties to the autonomy of the system as well.The MRS requires a certain degree of independence to facilitate the use of autonomous elements, thereby expanding into the selfmanagement capability and robustness of the system, including dynamic reconfigurability.Currently, self-reconfiguration is a challenge for modular hardware and software technologies.

Table 1 Development summary and concept comparisons of modular reconfigurable spacecraft.
From the perspective of connection type, the three main types are: contact, contactless, and virtual connections.Contact connections refer to connections using mechanical interfaces, mechanical joints, trusses, or hinges.Contactless connection refers to using electromagnetic force to achieve a connection.Virtual connection indicates the soft connection via formation flying.Contact connection is still the most popular connection method owing to its highest reliability.However, this method has the disadvantage of requiring timeconsuming and jeopardizing separation operations to move components relative to each other.The contactless connection is more flexible in the reconfiguration process, but it is not as stable as the contact connection due to the limited electromagnetic force action; furthermore, the electromagnetic action may produce certain interference to the spacecraft.The virtual connection has a relatively small scope of application, poor baseline stability, and requires frequent baseline maintenance.
4.A novel MSRS—MagicSat
Aiming at the future development of MRS, a novel MSRS MagicSat is proposed in this paper.MagicSat comprises building blocks with different functions, which are referred to as Magic Cubes.The Magic Cubes are connected using linkage units; therefore, the system can obtain self-reconfigurability and deformability.Through the autonomous reconfiguration and deformation of MRS,more working models with practical application patterns can be derived; thus, realizing selforganization and self-adaptation.This section mainly designs the modular structure and standardized interface of MagicSat.
4.1.Concept and system composition
The MagicSat aims to investigate an end-to-end spacecraft design approach that combines modularity, interfaces, and multi-mission scenarios to satisfy multiple space mission requirements with minimal costs.The MagicSat is composed of functional modules such as a basic unit(Magic Cube),linkage unit,assembling unit,and standardized interface,as shown in Fig.27.
The Magic Cube is the smallest spacecraft unit that can be operated independently;therefore,it is referred to as the basic unit, which consists of a platform layer, connecting layer, and payload layer.The functional map of the payload layer includes a positioning radar, imaging radar, visible-light camera, infrared camera, and communication antenna.The platform layer integrates control, drive, and transmission functions, with multiple or single subsystem functions such as orbit control, attitude control, and power supply, which support the payload to accomplish the mission.The connecting layer is responsible for the connection between the payload and platform layers, and further supports the expansion of equipment such as solar panels and communication antennas.The upper and lower surfaces of the platform layer, the surrounding surfaces of the connecting layer, and the upper surface of the payload layer have standardized interfaces, which can not only realize a connection between different functional module layers, but also facilitate the capture and manipulate of the robotic arm.
The basic units are cubes with similar appearances and sizes,containing standard interfaces in the middle of each surface.However, the MagicSat is a heterogeneous system because the basic units have different functions,and the system may further include special units such as mounting structures,thrusters, communication antennas, and solar panels.The basic unit can either be used as a stand-alone spacecraft to perform missions or be organically assembled with other basic units to develop a more versatile and capable spacecraft,thereby responding to a more complex and changeable mission.
The linkage unit is a type of modular manipulator with a symmetrical structure, which is used for connecting the basic units.Unlike other contact connections, the connecting unit enables the system to be deformable while balancing flexibility and stability.Both ends of the connecting unit use the standardized multi-function interfaces as actuators to realize the machine, electricity, heat, and data connections between the basic units.
The assembling unit is a structurally symmetrical walking manipulator responsible for moving or manipulating the basic unit.With standard interfaces at both ends, the assembling unit moves flexibly on a free surface with alternating head and feet movements, similar to the movements of a crawling robot.The assembling unit carries a base unit to a new location, enabling module replacement and assembly.In addition,the assembling unit can be self-assembled into an assembling robot, making it easier to move and handle on a free surface.Three typical motion modes of an assembling unit are shown in Fig.28.By employing the assembling unit, MagicSat acquires self-reconfigurability, suggesting that MagicSat gradually changes its configuration and shape without relying on astronauts or on large and expensive space robotic platforms.
On-orbit reconfigurability and deformability are the most prominent features of MagicSat, as shown in Fig.29.Reconfiguration refers to the disassembly and replacement of modules, addition and upgradation of modules, or reorganization of configurations.The reconfiguration process changes its topology, which leads to changes in the system dynamics.The deformation refers to the changes in the shape and orientation of an MRS, which supports the switching of the working modes of spacecraft, while its topology remains unchanged.The number of basic units of the MagicSat are initially configured according to the mission, and subsequently,supplemented and expanded continuously on orbit.The more the number of basic units,the higher the DOF of linkage units is, thereby increasing the flexibility of the system.The Magic-Sat has flexible and variable module combinations and a variety of application modes.By intelligently controlling the structure and function of the system,multiple functional modules of the original configuration are reassembled into the optimal configuration suitable for new tasks, which greatly improves the robustness and applicability of the system and meets the requirements of complex and changeable space tasks.

Fig.27 System composition of MagicSat.
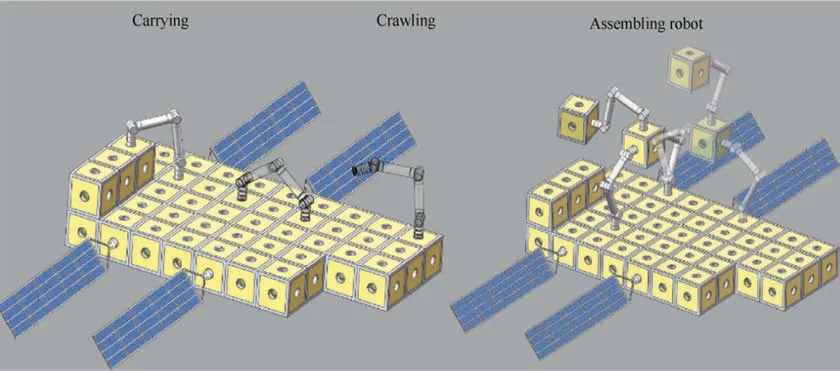
Fig.28 Typical motion modes of assembling unit.

Fig.29 Difference between reconfiguration and deformation.
4.2.Design of linkage unit and assembling unit
Both the linkage and assembling units are composed of a series of manipulator modules;however,each features different purposes.In this section,a complete module library of the Modular Reconfigurable Manipulator (MRM) is established to satisfy various task requirements of the linkage and assembling units.By combining different functional modules, MRMs of different configurations are obtained to complete the corresponding tasks,thereby greatly reducing the design cycle costs of the MRM.
According to the different mechanical structures and functions, the basic modules of the MRM are categorized into Itype joint (I), T-type joint (T), link (L), and gripper (G) modules, as shown in Fig.30.
(1) I-type joint module:The joint axis is parallel to the input and output axes of the module.The servo drive device of the joint module adopts a compact driver and DC servomotor, and uses a Hall sensor as the limit switch.
(2) T-type joint module: The joint axis is perpendicular to and intersects with the input and output axes of the module, allowing for a pitching motion.Furthermore,the servo drive of the T-type joint uses a compact drive and DC servomotor.
(3) Link module:This module does not possess a drive function and is connected to the I-type and T-type joint modules for resizing the MRM.

Fig.30 Module library of the modular reconfigurable manipulator.103
(4) Gripper module: This module features the same hermaphroditic standard interface as the basic unit; therefore, it can be docked with the base unit for gripping and manipulating.
The two types of joint module consist of a motor, reducer,sensor, brake, controller, and electrical interface (Fig.30).103To reduce the size and mass, the joint module adopts a motor with high torque and small volume, and selects a harmonic reducer with easy installation and lighter mass as the transmission mechanism.
According to the mission requirements of the MagicSat,we designed four typical MRMs, as shown in Fig.31.A single-DOF manipulator consists of an I-type joint module with identical actuators at both ends.A three-DOF symmetric manipulator consists of two I-type joint modules and one T-type joint module, and the three joints are orthogonal to each other to form a wrist joint,which exhibits the ability of three-DOF attitude adjustment.The single-DOF and three-DOF manipulators have lower degrees of freedom and are usually used as the linkage units to realize the on-orbit deformation of the MagicSat.A four-DOF symmetric manipulator consists of two I-type joint modules, two T-type joint modules, and one link module, and the axis of the T-type joint modules are parallel to each other.A symmetrical five-DOF manipulator is composed of two I-type joint modules, two link modules,and three T-type joint modules with parallel axes.The four-DOF and five-DOF manipulators are usually used as assembling units to realize OOA and on-orbit repair of basic units.
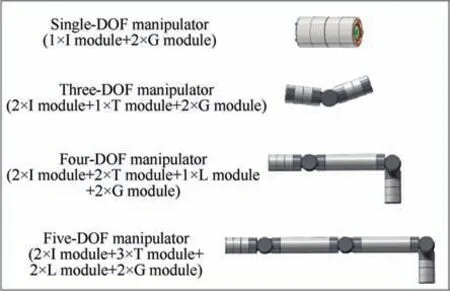
Fig.31 Typical modular reconfigurable manipulators of MagicSat.
4.3.Design of standardized interface
A key aspect of achieving modularity and reconfigurability is the standardization of interfaces.A docking mechanism is required for achieving mechanical connection between two basic units,between a basic unit and linkage unit,and between a basic unit and assembling unit.To reduce size and mass,the assembling unit does not carry a power supply; instead, it obtains power and maintains data communication through the connection with the basic unit.In addition, heat transfer is required between modules;therefore,it is necessary to design a standardized interface for mechanical, electrical, thermal,and data transmission integration.Based on the functional requirements of the basic and assembling units, the design requirements of the standardized interface are obtained.
(1) Hermaphroditic: The active and passive ends of a hermaphroditic docking mechanism have the same structure, which can satisfy any pairwise docking combination of different modules,ensuring the diversity and flexibility of the docking topology.
(2) Axisymmetric:An axisymmetric interface enables multiangle docking of two modules along the centerline,ensuring versatility,flexibility,and reliability of docking directions.
(3) Mechanical interface: A mechanical interface; i.e., the docking mechanism, locks and releases, ensuring that the integrated system can be reconfigured.However,the docking mechanism should ensure the stability of the integrated system in the process of reconfiguration,deformation, attitude control, and orbit control.
(4) Power interface: A power interface ensures that the battery and solar panels can supply power to each module and ensures the normal operation of each functional module.Therefore, the power interface should meet the requirements of transmission power and voltage.
(5) Data interface: A data interface enables data communication between different modules, and needs to ensure the reliability and efficiency of data transmission in the space environment.
(6) Thermal interface: A thermal interface is an important part of the thermal control system of spacecraft; it realizes the heat transfer between modules and ensures that the important subsystems of the spacecraft operate within a certain temperature range.
In the context of MagicSat, the iSSI interface designed by the iBOSS consortium has been considered.104–105On this basis,a guide cone is designed on the surface of the basic unit,which can not only play a radial positioning role, but also improve the strength and stiffness of the mechanical connection.To achieve autonomous docking of the assembling units,a vision system is added to the center of the docking interface to guide the accurate positioning and docking of the endeffectors.
4.4.Evaluation of system performance
The advantages of the MagicSat proposed in this paper can be analyzed from four aspects.From the perspective of modularity, MagicSat uses a hybrid architecture containing both homogeneous and heterogeneous modules.From the perspective of connection types,the modules are connected by linkage units,which ensures both flexibility and stability of the connection.From the perspective of topology,MagicSat can be composed of lattice topology, chain topology, and hybrid topology.From the perspective of autonomy, we consider the autonomous drive and motion control of MagicSat from the hardware and software point of view.Unlike other MRS, MagicSat is assembled and reconfigured autonomously on-orbit, which further enhances the speed of spacecraft deployment.Through the transformation of configuration and payload functions, a flexible and versatile working mode is formed, which rapidly responds to new task requirements.Specifically, the MagicSat has the following advantages:
(1) Modular warehousing technology can be used to select modules and customize spacecraft to rapidly develop aerospace application capabilities and achieve rapid response.
(2) The MagicSat can be used for the on-orbit construction of super-large structures in space, and promotes the development and application of technologies in the fields of astronomical observation and space solar power generation.
(3) The MagicSat can be configured or deformed to perform different tasks, making it suitable for a variety of aerospace applications.
(4) When a local module fails,the replacement of the failed module with a spare module can be accomplished via on-orbit reconfiguration, which is used to achieve selfrepair and self-upgrade.
(5) The MagicSat exhibits strong resilience.It can be dispersed into discrete modules in the face of threats, such as space debris, and reassembled after the threat is eliminated.
To verify the key technologies of MagicSat, we built a hardware-digital co-simulation system, as shown in Fig.32.The semi-physical system consists of a scenario simulation system, three satellite simulators, air-floating mobile platforms,and an air bearing table, which can realize the simulation of motion with all degrees of freedom and the simulation of payload.The digital simulation system is built based on MATLAB R2020a, ASAMS 2020, and ANSYS 2019R1 software tools, and has a visual human–computer interaction interface.It can perform statics, kinematics, and dynamics analysis,and is used to predict the performance,motion range,collision detection,and peak load of the semi-physical system.
To further elucidate the important features and comprehensive capabilities of the MagicSat, quantitative analyses and evaluations are carried out in terms of modularity, versatility,autonomy, reconfigurability, deformability, resilience, emergency response capability, and application mode.An evolutionary cobweb evaluation model is adopted,106and each evaluation index is divided into several grades, which indicate the maturity of the technology.The grade descriptions are defined as follows:
(1) Modularity is divided into 4 levels (0–4).
(2) Versatility is divided into 3 levels (0–3).
(3) Autonomy is divided into 5 levels (0–5).
(4) Reconfigurability is divided into 3 levels (0–3).
(5) Deformability is divided into 3 grades (0–3).
(6) Resilience is divided into 5 grades (0–5).
(7) Emergency response capability is divided into 3 grades(0–3).
(8) Application mode is divided into 5 grades (0–5).
The evaluation results of the evolutionary cobweb of MagicSat and other typical projects are shown in Fig.33.According to the comprehensive evaluation results, to realize specific tasks such as AAReST and OASIS, most MRS are designed to perform a specific task accurately and stably,with a general level of comprehensive capability.Unlike other MRS that realizes general tasks, MagicSat is more flexible and can generate more application modes, thereby providing greater versatility and mission disposition.
5.Application scenarios and application spectrum of MRS
In this section, we analyze the future application scenarios of MRS, and propose typical application configurations by considering MagicSat as an example.
5.1.Application scenarios
An MRS can perform combined and emergency rapid launch missions,as shown in Fig.34.By designing a reasonable initial configuration,multiple MRS can be combined into a standard launch configuration suitable for launch vehicles to achieve multi-satellites combination launches.After entering orbit,multiple spacecraft are separated from the launch configuration and perform self-reconfiguration, changing from the launch configuration to the initial configuration for performing routine missions.While encountering an emergency mission, the MRS first completes the corresponding mission by performing on-orbit deformation and mode switching.If an existing payload on an MRS cannot satisfy the current mission requirements, it can be supplemented by an emergency rapid launch.The emergency rapid launch can either launch the MRS with the required target configuration directly or launch the required modules and achieve functional upgrades through the on-orbit self-reconfiguration.
By carrying various payloads such as visible-light cameras,multispectral scanners, infrared detectors, hyperspectral, synthetic aperture radar, and communication antennas, the MRS can realize various operating modes such as visiblelight imaging, multispectral imaging, infrared imaging, SAR imaging, communication, and navigation.MRS exhibit the corresponding task capabilities when they are equipped with different payloads and are supported by the reconfiguration and deformation processes to accomplish the corresponding tasks.By combining different payload functions and topologies, a flexible application spectrum can be generated.

Fig.32 Hardware-digital co-simulation system.

Fig.33 Evolutionary cobweb evaluation results for typical modular reconfigurable spacecrafts.
Specifically, an MRS carries different payloads to satisfy different mission requirements and to achieve on-demand capabilities.For example, it can be equipped with visible-light cameras for imaging reconnaissance and is equipped with communication antennas for being used as communication satellites or relay satellites.If multiple basic units of a system carry the same payload,the system capability can be enhanced;for example,image fusion can be performed to increase resolution when multiple cameras are used for imaging reconnaissance.If multiple basic units carry different payloads, it is possible to achieve multiple capabilities for single satellite and to change its capabilities with different application scenarios.With the abovementioned advantages, the MRS exhibits good prospects for applications in aerospace remote sensing,OOS, and commercial spaceflight.
5.1.1.Aerospace remote sensing
Aerospace remote sensing refers to utilizing space technology to obtain information on ground objects or earth environment information and can serve the national economy, science and technology, and the military, characterized by a large surveillance range,all-day,all-weather,regardless of national boundaries and geographic conditions.According to the type of payload, remote sensing can be classified into the following:
(1) Imaging reconnaissance:An MRS can be equipped with an optical camera and synthetic aperture radar simultaneously, thereby featuring the advantages of multiple payloads, and truly achieving all-day and all-weather target reconnaissance.Simultaneous phase imaging of targets in the same area is performed by employing spaceborne optical cameras and radars,thereby realizing multi-source data fusion of optical and radar images and enhancing system efficiency.

Fig.34 Combined launch and emergency rapid launch of MRS.
(2) Electronic reconnaissance:Here,electromagnetic signals are received from target radar, communication, and other radio equipment, and the geographical locations of these radiation sources are determined to obtain communication intelligence and electronic intelligence.An MRS can detect and determine the locations of important targets by employing the electronic reconnaissance equipment to guide imaging reconnaissance.
(3) Satellite stereo mapping:This mapping process refers to a three-dimensional mapping of the surface facilities and physical geographic elements to obtain global or local topographic information.107Through on-orbit deformation, an MRS ascertains the observation angle between cameras to form a forward-looking, down-looking,and back-looking camera system, thereby realizing a dual-line-array and three-line-array stereo mapping.
(4) Missile early warning:Here,remote sensing devices such as infrared detectors and visible-light cameras are used to sense the infrared radiation emitted by tail flares during ballistic missile launch, determine the launching and flight directions of enemy ballistic missiles, and subsequently,signal a warning alarm.108An MRS can expand the early warning range by carrying multiple infrared detectors, and can further achieve early warning signals in multi-target areas through on-orbit deformation.
(5) Marine environmental monitoring: This process detects dynamic environments such as sea-surface wind fields,sea-surface height, and wave, flow, and temperature fields.The payload typically includes a microwave scatterometer, microwave radiometer, and radar altimeter.109An MRS has multiple basic units to support multiple payloads for marine environmental monitoring missions.
(6) Meteorological detection:Meteorological satellites carry a wide range of payload instruments, including visorinfrared detectors, imaging spectrometers, microwave radiometers, scatterometers, altimeters, and synthetic aperture radar.An MRS provides good installation surfaces and conditions for various payloads,and enhances the upgrade and on-orbit expansion capabilities of payloads using standardized interfaces and modular design.
5.1.2.On-orbit service
OOS refers to the implementation of on-orbit operations using robotic technology,which can be divided into two main areas:OOA and On-Orbit Maintenance(OOM).The OOA is mainly used for the construction of large space structures such as space stations, large space telescopes, and space solar power plants.The OOM is mainly divided into eight types: on-orbit inspection, capture, testing, clearing, refueling, repairing, part replacement, and deployment.110An MRS is a larger or functionally specific spacecraft built by integrating different functional modules; therefore, the MRS exhibits the characteristics of an OOS-oriented spacecraft.Simultaneously,by carrying multiple crawlable robotic arms,the MRS exhibits strong maneuverability and expansion capability, which can realize various OOM tasks.
5.1.3.Commercial spaceflight
The development of commercial spaceflight has gained significant momentum in recent years,and cost-effective microsatellites have enabled the development of commercial spaceflight based on large-scale constellation networking (Fig.35).By forming constellations, microsatellites can obtain the same performance as that of large satellites.The capabilities of mega-constellations benefit from the large-scale deployment of satellites, and therefore, place high demands on low-cost,short-cycle microsatellite development.Commercial spaceflight design is moving toward the reusability of systems and components.A modular approach provides a more systematic approach to OOS and OOA,enabling changes to the methods by which spacecraft are built and operated.By maintaining,repairing, and upgrading space components, the overall life of a satellite can be significantly extended, thereby reducing mission costs, improving reliability and sustainability, and allowing satellite developers to respond rapidly to commercial needs.An MRS adopts standardized and generalized modular structural components, which provides suitable conditions for integrated assembly and mass production of microsatellites.
5.2.Application spectrum

Fig.35 A large-scale constellation of modular microsatellites.
An MRS application spectrum represents the capability spectrum generated by reconstruction for actual task requirements in different application scenarios.The functional mapping of the payload includes radar positioning, radar imaging,visible-light imaging, infrared imaging, and communication.The functions of a basic unit can be flexibly customized by replacing the payload layer and adapting the platform layer.The basic units with different capabilities are physically connected and networked via linkage units, which integrate various payload functions, and all the basic units work together to develop a variety of MRS working modes.Through the self-reconfiguration and deformation of MRS, additional working modes with practical application value are derived.All these different working modes constitute the application spectrum of MRS.
The application spectrum comprises the payload function spectrum of the basic unit and the configuration spectrum of the platform.The configuration spectrum represents the configuration changes that are required to support the realization of the payload function spectrum, mainly including straight,torsion, folding, bending, and separation.In this study, a typical application spectrum of MRS is analyzed by considering the MagicSat carrying an optical payload or synthetic aperture radar as an example.To facilitate description,the MagicSat is herein referred to as BSANDF, which represents a MagicSat composed of S basic units and N manipulator modules(including linkage units and assembling units) with F DOF of the linkage units.By limiting the number of basic units to nine,a typical application spectrum of B1A1D5, B2A1D5, B3A2D3,B4A3D5, B4A4D4, B6A5D1, and B9A9D1can be obtained, as shown in Table 2.
6.Enabling technologies
Every mission and project reviewed in this study described the contributions of the relevant systems; however, the management, use, and control of MRS on orbit still face enormous challenges.Starting from the mission architecture, the important technologies required for supporting the development and implementation of MRS are analyzed and reviewed, providing detailed guidance for the future developments of MRS.According to the task requirements of an MRS, the enabling technologies are summarized, including modular technologies,integrated management technologies, and self-reconfiguration technologies, as shown in Fig.36.
6.1.Modular technologies
It is necessary to consider modularity in all aspects of the system, including hardware, control, and software design to gain all the benefits of modularity.
6.1.1.Hardware design
(1) Reasonable module division and design
A module division of a spacecraft is the first and crucial step of modular design.Whether the module division is reasonable will directly affect the functional realization and technical cost of subsequent spacecraft development.Here, Fig.37 shows the modularity hierarchy and implementation methods according to the state-of-the-art technologies.However, there is a long way to go to achieve high-level modularity in all components.51,111Current modular designs focus on the homogeneous modules; however, heterogeneous modules with diversity are as important as homogeneous modules.29Heterogeneous modules for specific tasks increase the utility of modular spacecraft, such as propulsion modules, planar optical modules,communication antennas, and solar panels.A serialized module design enhances applicability, and enables multiple functional configurations to satisfy the environmental and task requirements.Conversely, heterogeneous modules with non-standard form factors increase the difficulty of installation and reconfiguration.Therefore, the module design should consider various factors such as structural size, shape,and installation location.
(2) Standardized interface design
A standardized interface links the mechanical connections and information transmissions between modules and is an important aspect of modular spacecraft implementation.To achieve a plug-and-play architecture between modules, an integrated mechanical, thermal, data, and power transfer interface should be designed.The design of standardized interfaces should meet the requirements of convenient docking, disassembly, and high reliability, as described in Section 4.3.The University of Berlin and RWTH Aachen University designed an Intelligent Space System Interface(ISSI) for the iBOSS project.105,112Three versions have been designed hitherto, with more compact structures and more complete functions, as shown in Figs.38(a)-(c).The 3rd ISSI is designed on the basis of the 2nd docking mechanism, which integrates the power transmission device with the guide cone,greatly reducing the size of the docking mechanism, making the structure more compact and improving the function.The Massachusetts Institute of Technology (MIT) developed a Universal Docking Port (UDP) for the SWARM project,113–114which includes two configurations: Class A and Class B, as shown in Fig.38(d).The Class B interface adopts a hermaphroditic design and consists of a mechanical coupling part and a related control part.The control part includes components such as visual guidance and drive circuits.The Standard Interface for Robotic Manipulation(SIROM) of payloads in future space missions is a part of the H2020 project funded by the EU to develop a compact,integrated, and intrinsically optimized multifunctional standardized interface.Javier Vinals designed a gripping docking mechanism for the SIROM project, as shown in Fig.38(e).115Marko Jankovic et al.also designed for the SIROM docking mechanism, as shown in Fig.38(f).116Orbital Express (OE)mission selected a ‘‘three arm grapple”docking mechanism(SRC) to realize the integrated design of docking and electrical-hydraulic connection.The design would consist oftwo main subassemblies: an active mechanism and a passive structure.The initial SRC prototype was completed in early 2000 and a series of prototype tests were carried out.To increase the capture capability and improve the accuracy of the guidance and navigation controls, DARPA designed a 2nd prototype, as shown in Fig.38(g).117–118NASA Johnson Space Center designed an electromagnetic docking mechanism for miniature autonomous extravehicular activity robotic camera (Mini AERCam), as shown in Fig.38(h).119Electromagnetic docking which greatly simplifies the mechanical structure, and makes docking simpler, can be quickly docked and locked, and is mostly used for docking of small satellites.To simplify the OOS of microsatellites in Geosynchronous Orbit (GEO), ESA has proposed an integrated electro-hydraulic probe-drogue ASSIST based on droguetype docking mechanism.120ASSIST mainly consists of a docking capture system and an electric-hydraulic connection port, as shown in Fig.38(i).
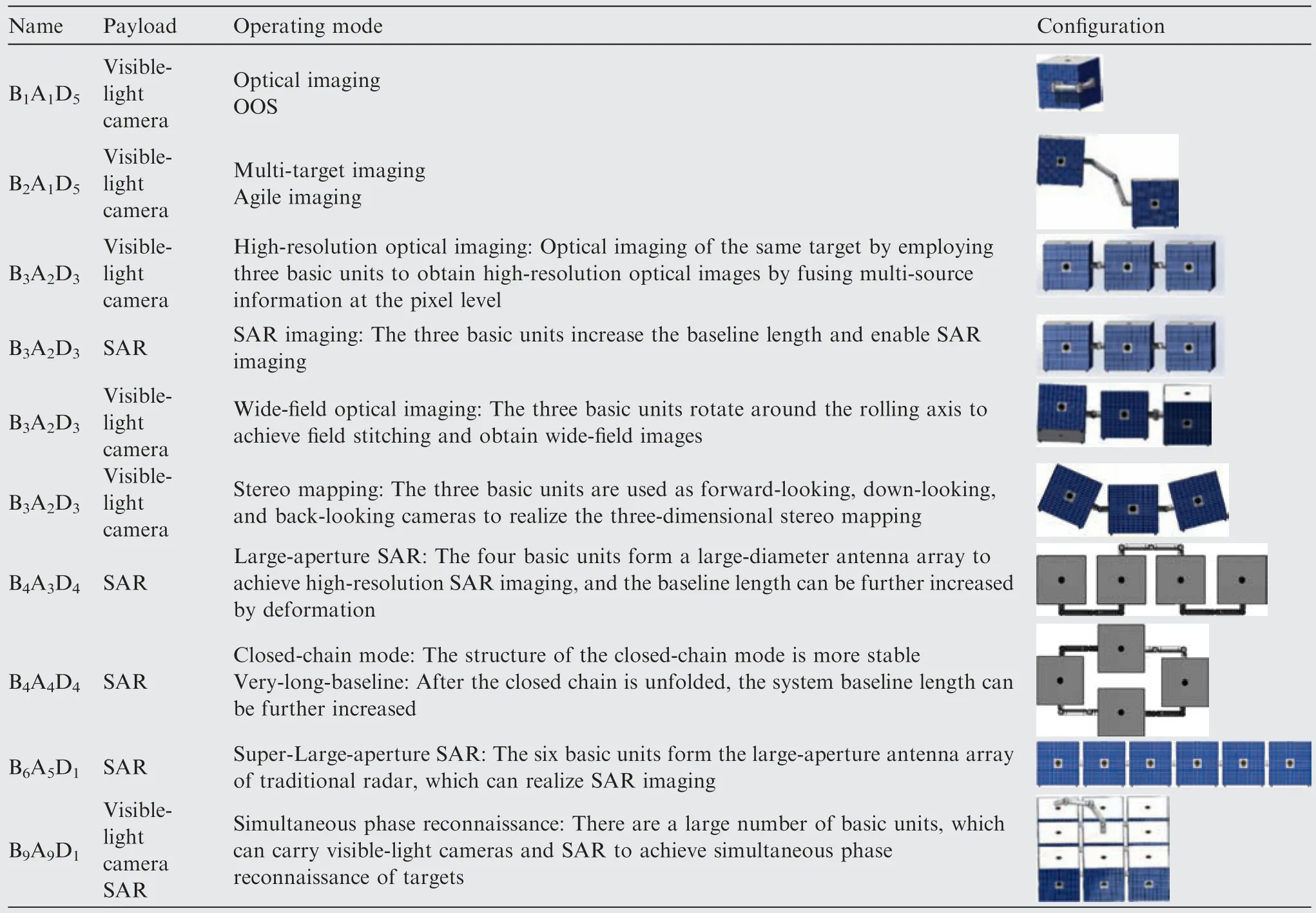
Table 2 Typical application spectrum of MagicSat.

Fig.36 Enabling technologies of MRS.

Fig.37 Modularity spectrum.51
6.1.2.Software technology
Modular hardware design requires a matching modular, distributed, data-centric software framework.121In this architecture, software processes are split into simpler units and are arbitrarily distributed in a distributed network such as hardware processors for parallelism and redundancy.These distributed systems may have a large number of potential configurations and interactions between components, and it is impractical to explicitly plan and predict all potential future uses and possible configurations.Mark Post proposes selfconfiguration using universal semantic self-awareness, which is an approach that allows a segmentation system to be fully self-aware and incorporate its configuration into the learning and reasoning processes performed during autonomous operations.122The use of semantic reasoning to organize modules at the bottom of a system according to the autonomous computing principles is particularly valuable in the field of modular applications.
The key to achieving autonomous operation of modular systems is the management of the software complexity,including the operating system and middleware environment.123NASA proposed a Coupling Layer Architecture for Robotic Autonomy (CLARAty) to improve the modularity of system software and tightly couple the interactions between autonomous and dependent controls.124Europe has funded research on modular and reconfigurable open-source software frameworks, including the European space robotics control and operating system (ESROCOS)125and the TASTE toolset.General Electric used an ASSERT toolchain (analysis of semantic specifications and efficient generation of requirement-based tests)to assist in the development and testing of complex software frameworks.126
6.1.3.Configuration description
The term configuration refers to a unique topology of the system.An MRS can be assembled into many possible configurations and is reconfigurable by making corresponding changes to the kinematic and dynamical parameters.The configuration of MRS should be determined to model its kinematics automatically.Therefore, a mathematical representation of the topological information and characteristics of an actual system in an accurate, concise, and unique way is required.
Denavit-Hartenberg (DH) parameters and the Unified Robot Description Format (URDF) are commonly used for kinematic modeling of robots.127In the case of MRS, each linkage frame parameter should be redefined when the configuration changes.Directed graphs are easy to describe, implement, and represent the structural model of MRS visually and intuitively; however, these are not suitable for computer programming.128The adjacency and incidence matrices are used to represent a wide range of graphs and are suitable for computer programming.Adjacency matrices are usually easier to analyze, while association matrices can better represent data.129Assembly Incidence Matrix (AIM) is a configuration description method based on kinematic graphs.130However,the kinematic graph and corresponding AIM are not sufficient to describe all possible configurations of an MRS.Ref.131proposed a general assembly configuration representation method and a configuration-independent kinematic modeling method,using an assembly graph, to represent an MRR topology,and defined an improved adjacency matrix to mathematically describe the MRR configuration, referred to as the Assembly Adjacency Matrix (AAM).
6.1.4.Configuration optimization
The designing of a target configuration that is suitable for a given task is a complex combinatorial optimization problem.For multi-module MRS, there are several possible configurations owing to different connection methods.As more modules are added,the number of possible configurations will proliferate.The global performance and efficiency of the MRS configuration design cannot be guaranteed in a manual design method.The configuration design problem can be modeled as an optimal problem by designing optimization index suitable for the task requirements to obtain the optimal configuration.132–133Meanwhile, the function, shape, size, and installation position of the module must satisfy the corresponding constraints.

Fig.38 Typical proposals for standardized interface: (a) 1st ISSI,112 (b) 2nd ISSI,112 (c) 3rd ISSI,105 (d) UDP Universal Docking Port,113–114 (e) SIROM designed by Javier Vinals,115 (f) SIROM designed by Marko Jankovic,116 (g) SRC,117–118 (h) Mini AERCam,119 and (i) probe-and-drogue ASSIST.120
6.2.Integrated management technologies
Integrated management technology represents an integrated controller that coordinates, manages, and controls the operation of subsystems.Self-awareness, automatic modeling, distributed control, and health management of reconfigurable systems are important components of the integrated management technology,which are described in the following sections.
6.2.1.Self-awareness
Self-awareness indicates that a system is aware of its state,capabilities, and topology.The main feature of MRS is the ability to add/remove modules dynamically from current configuration depending on the environment,thereby enabling the system to recognize the modules in the current configuration and discover their location; thus, automatically determining their configuration.This process involves communication between modules and communication protocols.Baca proposed a configuration discovery method based on a real-time distributed architecture that combines infrared and XBee communication protocols, which significantly reduces the time required for each module to discover the configuration.134Liu proposed a more efficient polynomial-time configuration recognition algorithm that solves grouping matching and mapping problems.135.
In addition, an MRS should perceive its state parameters,including position, attitude, velocity, angular velocity, and inertial parameters.Therefore, an MRS should be equipped with the corresponding sensors to obtain sufficient information, such as visual servo sensors and laser radar.136–137.
6.2.2.Automatic modeling
Generally,for an MRS with fixed configuration,the kinematic and dynamic equations are manually derived.However,obtaining the kinetic equations for every possible configuration is impractical because certain configurations cannot be predicted.Therefore, automatic computer-aided generation of kinematic and dynamic models is essential.In Ref.138,modern screw theory was used to model the automatic kinematics of reconfigurable robots.Ref.139applied a special Finite Element Method (FEM) for an automatic modeling of the kinematics and dynamics of reconfigurable robots.Ref.140presents a kinematic modeling method based on a general orthogonal framework.In Ref.141, a unified modeling method for underwater self-reconfigurable robots based on graph theory and path matrix was proposed by using the Kane method.Ref.142proposed a method for automatically generating motion equations of multichannel MRR based on the Newton-Euler recursive method.The dynamic equations based on the Newton–Eulerian method are simple, fast, and accurate, but the forward and inverse recursive equations deteriorate the overall structure of the dynamic model and cause difficulties in the design of the controller.
6.2.3.Distributed control system
The distributed control system is important in achieving module-level simplicity and flexibility to support various configurations.Almost all space hardware is based on a centralized design with high reliability and redundancy, such as using Triple Modular Redundancy (TMR).However, MRS is inherently suitable for natural distribution and redundancy,and the system design ranging from centralized redundancy to decentralized redundancy significantly simplifies and reduces the individual component costs.29These systems distribute functions among multiple components for improving the efficient use of resources and increasing the system robustness.Furthermore, these systems manage other systems consisting of multiple modules and allow the number of modules to change dynamically.In addition, the distributed control strategy integrates the information interaction between the controllers to form a distributed cooperative control network,which further improves the reliability and fault tolerance capacity of the control system.Although this increases the complexity of the system design to a certain extent,it is essential to achieve a high degree of modularity in future space systems.
Ref.143compared several design methods of distributed controllers in industrial automation systems.A distributed controller design method was obtained by directly solving a two-layer optimization,realizing the modularity of component switching of the control system.144In this system, complex system-level controllers remained constant for different component variables, and only simple controllers implemented in components varied with intelligent components; therefore,controllers only need to be maintained in swappable components.Ref.145proposed an FPGA-based distributed communication and control infrastructure general architecture responsible for all data communications in the system,component connections and disconnections, and the distributions of mode data (Fig.39).This mechanism is more resourceefficient and fault-resilient than the TMR or software-based central control mechanisms.Ref.146studied the finite-time H∞distributed controller design problem of a class of positive multi-agent systems with Lipschitz nonlinearities.Ref.147and Ref.148studied the distributed allocation method of modular spacecraft attitude control resources with limited actuator unit capacity.
6.2.4.Health management system
Health management system is a comprehensive system for data collection, fault detection, health report generation, and fault recovery of spacecraft software and hardware.It is responsible for solving errors and accidents during the full cycle of spacecraft on-orbit operations related to the safety of spacecraft.Supporting the autonomous health management of a spacecraft is an important requirement for avionics systems.As the functionality and complexity of spacecraft avionics systems increase, the health management and fault-tolerant reconfiguration capabilities of these systems are gaining attention.Ref.149proposed a model for assessing a system state based on integrated system health management, which used fuzzy analytic hierarchy process and quantitative reliability analysis to evaluate the health state of manned spacecraft avionics(Fig.40).Ref.150used Bayesian networks to develop software and sensor (hardware) health management models for fault detection and diagnostic reasoning on small satellites.
With the advent of Artificial Intelligence (AI) technology,intelligent health monitoring and management approach based on data-driven methods such as deep learning, data fusion,and data mining has proliferated.151–152Reasoning techniques have important applications in spacecraft health monitoring and health management, including diagnosis, scheduling,reporting, decision support, troubleshooting, behavioral analysis, strategy planning, optimization, and context awareness.Implementing reasoning at the vehicle level remains a challenging task in terms of access and acquisition of monitoring data from different systems and compatibility of different types of data processing and monitoring methods.153As a physical–virtual fusion model framework, this digital twin not only integrates historical data, real data, and model data, but also maintains real-time synchronization between virtual models and physical entities, promising a new approach to spacecraft fault detection and health management (Fig.41).154

Fig.39 Distributed communication and control infrastructure general architecture.145

Fig.40 Conceptual framework of integrated system health management.149
6.3.Self-reconfiguration technologies
Self-reconfiguration technologies refer to the main technologies involved in the on-orbit self-reconfiguration process of MRS,mainly including autonomous rendezvous and docking,assembly sequence and path planning, and autonomous robotics technology.
6.3.1.Autonomous rendezvous and docking
Rendezvous and docking typically occur during OOS and space station missions, using transport vehicles to provide equipment,tools,fuel,supplies,and maintenance to the target spacecraft.The rendezvous and docking can be divided into three sequential phases.155First, the long-distance rendezvous phase wherein the service vehicles maneuver from a range of hundreds of kilometers to less than hundred meters.Second,the proximity operations phase wherein the vehicles move closer to the target until the target is a few meters along the final approaching corridor.Third, the final phase wherein the two spacecraft are coupled by rendezvous, capturing or docking.During the rendezvous phase, the serving spacecraft employs absolute navigation techniques to shorten the distance.Once the target is located by the onboard sensor components, the serving spacecraft monitors, and tracks the target spacecraft autonomously.To solve the automatic docking problem, it is necessary to continuously and accurately measure the relative pose parameters between two spacecraft,156–157namely a chaser and a target.Relative navigation sensors improve the sensitivity, reliability, field of view, and performance of the detector,thereby allowing the two vehicles to rendezvous,perform proximity operations, and dock/capture independently without any communications with the ground station.

Fig.41 Digital twin-based fault diagnosis and health monitoring framework for satellite systems.154
In the final phase of rendezvous and docking,flight safety is the most basic requirement and prerequisite for all on-orbit missions.Due to the complexity of the space environment,uncooperative objects or obstacles, such as space debris, may affect the spacecraft,leading to mission failures and significant economic losses.Therefore, the service spacecraft must have high maneuverability and autonomous obstacle avoidance capability to generate real-time responses to environmental changes.158–159
6.3.2.Assembly sequence and path planning
On-orbit assembly is a combined step in the selfreconfiguration process, and the method to complete the assembly work efficiently, safely, and reliably is still a contentious problem.Assembly sequence and path planning decompose assembly tasks into action sequences that can be executed by assembling units, which is usually an NP-hard problem.160Reasonable planning of the assembly sequence and path helps to improve assembly efficiency and reduce assembly costs.Previous studies on computer-aided assembly sequence planning were based on graph search theory; however, these plans are not being currently used in industry,mainly due to the difficulties in handling uncertainty and rapidly obtaining globally optimal solutions for complex structures.Modern CAD software tool helps engineers with planning, but a lot of manual labor and expertise are still required in developing existing robotic systems.161–162In recent years,several studies have been focused on the implementation of AI techniques and knowledge-based methods to minimize computational time to obtain optimal feasible assembly sequences.Researchers have used several AI techniques, but most of them converge prematurely at local optima and fail to obtain the global optimal feasible assembly sequence.163The fusion and complementary advantages of different soft computing methods are new trends in current soft computing applications.164DLR has developed a fully automated assembly system for aluminum profiles that automatically decomposes a certain assembly specification into assembly sequences, and subsequently, maps these assembly sequences to executable robotic skills.165–166Furthermore, DRL considered the MOSAR project as an example and proposed a hybrid planning system with logical and physical layers, which could generate a plan to transform the modular satellite from its initial configuration to its final configuration, as shown in Fig.42.167
6.3.3.Autonomous robotics technology
Autonomous robots are the key to realizing selfreconfiguration operations such as OOA and module replacement of MRS.Although ample research has been conducted on space robots, achieving fully autonomous on-orbit operations still faces many challenges, as listed in Table 3.38,155,168Autonomous robots require strong perception capabilities,autonomous decision-making capabilities, and high-precision operation capabilities.First, an autonomous robot acquires its state and surrounding environment data via the intelligent system,sensors,and memory,and obtains relevant state information through data fusion processing.Subsequently, this information is used in decision-making processes, including planning, rendezvous, object recognition, pose estimation,docking, task execution, fault diagnosis, and anomaly resolution.Finally, high-precision and safe operation tasks are accomplished to realize the self-reconfiguration of MRS.

Fig.42 Architecture of DRL’s autonomous assembly sequence planning system.167

Table 3 Autonomous robotic technologies and challenges.38,155,168.
7.Recommendations for future developments
The progress of MRS development and its related technologies are reviewed from three aspects:modularity,reconfigurability,and autonomy.These technologies are the key to realizing onorbit applications of MRS in future.Combining the progress of cutting-edge technologies such as AI, cloud computing,and digital twin, recommendations for future developments are presented in the following sections.
7.1.Unified module division standard
Module division should have a unified standard like that of a computer.Despite the promising prospects of modular systems and impressive technological developments, most modular technologies remain in laboratories.29This is because there is no unified standard for module division, and trying to solve all problems by implementing modularization is impossible.The modular design approach should distinguish between general and special modules.Generic modules are primarily used to support spacecraft operations, including power modules,orbit control modules,attitude control modules,and computation modules.Mission-specific special modules mainly represent the optical payload modules, SAR radar modules,communication antenna modules,and other payload modules.Each module should have the same design standards that are interchangeable.Each type of module should be divided into different series according to shape, size, and capability, and should form the corresponding family atlas.When all research institutions adopt the same standard, it is more likely to promote the practical applications of modular technology.
However, the external dimensions and installation requirements of each payload is different, which causes additional challenges restricting the development of modularity.For example, optical cameras require long focal lengths and are difficult to integrate well with general modules.Therefore, it is necessary to design an appropriate structure that provides the corresponding installation conditions for different modules.Meanwhile, the planarization of optical systems by using hyperlens is an effective way to solve this problem.169–171
7.2.Human-on-the-loop supervised autonomy
The autonomous boundary between humans and intelligent machines and the human–machine relationship affects the security of autonomous systems.Autonomy has been a prominent issue of extensive research on MRS.Autonomous systems operate independently of external controls in dynamic environments, resulting in improved reaction time and performance,reduced personnel burden, and reduced costs.However, fully autonomous systems may cause decision-making errors or ethical problems due to data traps.Therefore, the autonomous boundaries of these systems should be limited, and the system security processes should be under human supervision.
The human–machine relationship will undergo a spiral evolution from HITL semi-autonomy to HOTL supervised auton-omy.36,172The supervised autonomy of HOTL indicates that humans are located at the top level of the system to supervise and ensure system security by monitoring data, supervising decisions, monitoring algorithms, evaluating and correcting system behavior, and taking over the control system for operations or decision-making when necessary.Both humans and machines may make decision-making mistakes.Through the interconversion of HOTL and HITL,mutual error corrections and complementarity of humans and machines can be realized,avoiding a simple mechanical cycle.
7.3.Simulation analysis technology based on digital twin
The digital twin is a technical means to create virtual entities digitally that reflect physical entities and simulate, verify, predict,and control the full lifecycle processes of physical entities with the help of historical data,real-time data,and algorithmic models.173In 2012, NASA formally introduced and defined the term ‘‘Digital Twin”in a report.174Since then, NASA and the U.S.Air Force have explored the application of the digital twin in aircraft health management and jointly discussed the demand, development, and prospect of the digital twin.175In the following years, several studies applied digital twin concept in the aerospace industry.China, the United States, and Germany have considered the digital twin as one of the core technologies in the period of Industry 4.0.173,176–178
The MRS is a multi-DOF complex system that places high demands on system design,integration,testing,operation,and maintenance.The ground physical simulation and semiphysical simulation are difficult, long-term, and expensive to implement.Traditional computer simulations exhibit difficulties in performing full-process analyses and full-cycle detections of the interactions between components, and do not perform real-time analysis and possess optimization functions.A digital twin connects the physical and digital objects in a precise and real-time manner,featuring interoperability,scalability, real-time operability, fidelity, and closed-loop operability.The simulation analysis technology based on digital twin monitors the current state of a physical entity based on realtime feedback information.Furthermore, it improves the simulation analysis algorithm of a virtual entity based on the collected operational data of the corresponding physical entity,thereby providing more accurate results for aiding the decision-making process for the subsequent operations to improve the physical entity.Therefore,the simulation analysis technology based on the digital twin will have important application prospects in the whole process and lifecycle stages of MRS, such as optimization design, integration test, system evaluation, flight test, health management, and on-orbit reconfiguration.
8.Conclusions
(1) MRS is a novel and potential spacecraft system.Here,we defined a set of basic concepts of MRS, including modularity, topology, reconfigurability, deformability,autonomy, self-reconfiguration, resilience, and manufacturability.
(2) Space applications of modular technology are still in their infancy, and the design and conception of MRS lack relevance and are not integrated with the characteristics of the space environment and mission application requirements.The future development of MRS should tend toward mission traction, hybrid topology, and intelligent autonomy.
(3) The MagicSat proposed in this paper is a new MSRS,which can perform self-reconfiguration and deformation on orbit, and has higher flexibility and emergency task handling ability.The MagicSat has a broad application spectrum and has good application prospects in aerospace remote sensing,OOS,and commercial spaceflight.
(4) To promote the on-orbit application of MRS,more reasonable modular design technology, intelligent and autonomous integrated management technology, and high-precision self-reconfiguration technology should be realized.
(5) Unified modular division standards and serialized and family-oriented modular design aid in promoting the implementation of modular technology.The HOTL supervised autonomy can effectively coordinate the relationship between humans and machines, and achieve mutual error correction, complementation, and enhancement.
(6) The simulation technology based on digital twin can provide MRS with a full process and full lifecycle technology verification platforms and simulation environments.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Acknowledgements
This work was supported by the National Defense Science and Technology Innovation Zone of China (No.00205501).
杂志排行

CHINESE JOURNAL OF AERONAUTICS的其它文章
- Improving surface integrity when drilling CFRPs and Ti-6Al-4V using sustainable lubricated liquid carbon dioxide
- A hybrid chemical modification strategy for monocrystalline silicon micro-grinding:Experimental investigation and synergistic mechanism
- Analysis of grinding mechanics and improved grinding force model based on randomized grain geometric characteristics
- Experimental and modeling study of surface topography generation considering tool-workpiece vibration in high-precision turning
- Collaborative force and shape control for large composite fuselage panels assembly
- Ultrasonic constitutive model and its application in ultrasonic vibration-assisted milling Ti3Al intermetallics