基于无人机贴近摄影测量的剖面数字露头系统研发及岩层面重构方法
2023-09-04郑红霞李凌昊盛辉刘善伟冯建伟许津梁承佳昌伦杰
郑红霞 李凌昊 盛辉 刘善伟 冯建伟 许津 梁承佳 昌伦杰
摘要:針对大坡度、大规模的露头剖面考察中识别范围不足,面貌不全、人工依赖大、精度差、数据共享低的状况,使用无人机贴近摄影测量技术摄取露头剖面影像,建立毫米级精度的全景三维模型,采用Web GIS技术,自主研发网络版数字露头平台,实现露头数据的共享。为重构某一局部岩层面,三维模型表面需建立一个贴面。数字地球引擎Cesium内置方法、边界面法建立贴面时,出现了贴面范围不准确、内部不连续的问题,提出一种在Web虚拟场景上充分利用空间场景几何特征与空间距离度量关系,自动判定岩层剖面特征点的新方法。特征点作为加密点在空间范围内构建三维Delaunay三角网,准确标定出某一岩层范围,实现了剖面岩层的重构。结果表明,该方法重构的岩层范围正确,内部连续,结果清晰,为地质资料知识库构建提供辅助手段与数据支撑。
关键词:无人机贴近摄影测量; 数字露头; 特征点; 岩层面重构; Delaunay三角网
中国分类号:P 628.4 文献标志码:A
引用格式:郑红霞,李凌昊,盛辉,等.基于无人机贴近摄影测量的剖面数字露头系统研发及岩层面重构方法[J]. 中国石油大学学报( 自然科学版) ,2023,47(2):53-63.
ZHENG Hongxia, LI Linghao, SHENG Hui, et al. Research of digital outcrop profile system and reconstruction method of rock surface based on unmanned aerial vehicle close photogrammetry[J]. Journal of China University of Petroleum (Edition of Natural Science),2023,47(2):53-63.
Research of digital outcrop profile system and reconstruction method of rock surface based on unmanned aerial vehicle close photogrammetry
ZHENG Hongxia1, LI Linghao2, SHENG Hui1, LIU Shanwei1, FENG Jianwei3, XU Jin1, LIANG Chengjia1, CHANG Lunjie4
(1.College of Oceanography and Space Informatics in China University of Petroleum (East China), Qingdao 266580, China;2.Xiaomi Communications Company Limited, Beijing 100085, China;3.School of Geosciences in China University of Petroleum (East China), Qingdao 266580, China;4.Exploration and Development Research Institute, PetroChina Tarim Oilfield Branch, Korla 841000, China)
Abstract: A new approach is proposed to address the issues of insufficient identification range, incomplete appearance, poor accuracy, high artificial dependence, and low data sharing in the investigation of large-scale outcrop profiles of a large slope. UAV nap-of-the-object photography technology is used to capture outcrop profile images and a three-dimensional model is established with millimeter accuracy. Based on this, a network digital outcrop platform is developed using Web GIS technology to share the outcrop data. To reconstruct a local rock surface, a veneer should be built on the surface of the 3D model. There are some problems such as inaccurate veneer range and discontinuity veneer in the methods of Cesium built-in and boundary surface which are often used to build the veneer. This paper proposes a novel method to automatically determine the feature points of a rock profile in Web virtual scene by utilizing the relationship between geometric features of spatial scene and spatial distance measurement. These feature points are used as interpolation points to construct 3D Delaunay triangulation network to form a veneer on the surface of the 3D model, enabling the reconstruction of the rock profile in the Web virtual scene. The experiments show that the reconstructed rock range is correct, and the internal continuous results are clear. It effectively calibrates the strata range and provides auxiliary means and data support for the construction of geological data knowledge base.
Keywords:UAV nap-of-the-object photography; digital outcrop; feature point; rock layer reconstruction; Delaunay triangulation network
地质露头是地质工作的重要研究对象,对其考察、量测、分析能够有效地获取岩体、地层、矿床等信息[1],为地质科学研究提供重要的资料[2]。露头剖面经数字化后建立的三维模型称為数字露头,能还原地质露头原貌,保留真实的坐标、颜色、纹理等信息,有效解决野外露头考察面临的危险性高、环境影响大、工作效率低等问题,逐渐成为地质信息分析的强有力工具[3]。数据获取是建立数字露头模型的基石,新技术、新方法层出不穷[4]。无人机摄影测量视野广阔、定位精准、作业高效,近年来得到广泛的应用[5]。印森林等[6-7]率先将该技术用于数字露头模型数据采集中,实现了单机版地质信息的三维数字化、可视化和定量化研究。但常规倾斜摄影测量采用多个镜头摄取平面或小倾角斜坡面上的影像[8],摄影中存在视角盲区,对于坡度大、凸凹不平的复杂地质剖面的识别能力不足、识别精度不够,无法获取微小结构的精细信息[9]。无人机贴近摄影测量技术的出现,大大推动了精细化三维建模的发展[10],然而该技术仍处于起步阶段[11],在露头领域中的应用案例甚少[12]。三维建模方面,地学领域广泛使用的Petrel等软件专注于地质学、地球物理学领域地下数据的三维可视化,而无人机影像数据的处理与建模依赖于摄影测量与计算机视觉软件系统,如ContextCapture等[11]。后者依据空中三角测量、影像的密集匹配,建立区域内连续的三维表面模型,建模结果可在单机上浏览,数据跨平台、跨人员间的共享性差,限制了其在地学领域的普及[13]。随着计算机技术、网络地理信息技术的革新,网络版数字露头三维系统的研发迫在眉睫[14]。已有系统中三维模型分辨率低,数据源有限[15],因此基于无人机影像数据,建立精细实景三维模型,研发特定功能的Web系统成为热点[16]。三维开发引擎Cesium因拥有完善的地球影像,可加载摄影测量三维模型,成为网络版三维系统研发的主流[17]。网络系统的出现,提高了数据的共享程度,加快了信息的传递速度,然而系统中整体场景是连续的三维表面,仅适合于宏观可视化浏览,无法操作和管理局部对象,实现精细化分析与信息提取,即单体模型建立及信息提取能力匮乏[18]。虚拟场景中重构岩层面可由分割法、贴面法等实现。分割法分离出的点云数据量巨大[19],构建的面片数目众多,计算速度慢[20],不适用于网络系统中重构局部对象[21]。贴面法是在三维模型的表面新建一个贴面,以标识岩层的分布范围[22],此方法数据量少,速度快,但岩层面多为曲面,以平面拟合曲面,差异巨大。三维开发引擎Cesium内置了贴面的构建方法,但仅适用于小坡度的岩层面,反之会出现贴面范围不正确、贴面内部不连续的状况[23]。因此针对大坡度、凸凹不平的岩层面,需研发一种Web系统上贴面重构的新方法。笔者采用无人机贴近摄影测量技术对一大坡度、大范围的野外露头实施摄影,获取毫米级别分辨率影像,经数据处理后,建立精细实景三维模型,拓展无人机贴近摄影在野外地质调查中的应用。综合采用Electron、Nginx技术及Cesium引擎研发一个数字露头三维信息分析系统,实现露头考察数据的综合化、共享化和可更新化。针对坡度大、局部凹凸明显的数字露头三维模型,提出一种在Web虚拟场景上充分利用空间场景中的3D局部特征与空间距离度量关系,自动判定剖面岩层特征点的新方法,利用特征点构建三维Delaunay三角网,实现数字剖面三维模型的贴面构建,完成岩层面重构。
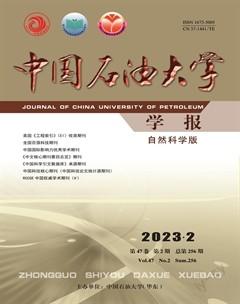
1 研究区概况
以内蒙古自治区乌兰察布市岱海湖西侧约17 km附近的地质露头为研究对象(图1)。该处地质露头处于华北地台西北部的阴山断块、鄂尔多斯断块和太行断块结合部,岱海西侧的木花河三角洲内,区域平均海拔高度约为1 270 m,岩层剖面长度约为260 m,高度位于5.2~5.8 m,坡度位于76°~88°。岩层面非均一光滑,存在多处锯齿状、柱状、鼓包状凸起,从剖面底部或者中部贯穿至顶部,外突最大距离近1 m,水平方向上外凸最大范围长达8 m,因上述凸起的存在,岩层面的局部走向发生转变,最大转折角高达72°。总之,该露头坡度大、延伸长、坡面不平整、局部多转折,存在若干裂隙、空洞、凹坑,上述复杂的空间场景特征,增加了三维精细建模的难度。
2 贴近摄影测量与系统研发
2.1 无人机贴近摄影测量
2.1.1 数据获取
数据获取时,若使用传统的无人机倾斜摄影测量技术,露头的侧面纹理难于获取,无法建立精细模型,而无人机贴近摄影测量能以毫米级的精度将二维非规则露头剖面向三维空间拓展,因此通过合理的布设航线、限制航高,提高影像获取精度。
本文中采用Phantom 4 Pro无人机,蛇形垂向航线,航向和旁向重叠度均为80%,对图1中所示的地质剖面进行贴近摄影测量。无人机首先从地质露头区的左侧底部起飞,由下至上匀速飞行,至剖面顶部,完成了第一条航线拍摄,之后转折,由上至下飞行,进行第二条航线的拍摄,循环往复,完成整个区域的影像获取,见图2,共采集了2 177张高分辨率影像。该无人机系统在使用前,在实验场地进行了相机参数的标定与检验,确定了相机实际焦距为9.9 mm,而非标称焦距35 mm[12]。研究表明,航高为决定模型精度的关键因素[9],而不是飞行平台,在一定的航高限制下,模型精度与全站仪量测精度一致,高达毫米级别[24]。航高计算式为
H=fd/a. (1)
式中,H为航高,m;f为焦距,mm;d为地面分辨率,mm;a为相机像元尺寸,一般取值为4.7 μm。
由式(1)可以看出,在相机焦距及像元尺寸一定的情况下,飞行航高越高,地面分辨率取值越大,无人机影像上能区分开两个相邻地物的能力越低,影像分辨率越低。因此外业摄影时,不断调整相机的角度与无人机的位置,使相机主光轴与露头面垂直,两者保持10 m的间距。当相机焦距分别取9.9、35 mm时,根据式(1)计算影像的地面分辨率分别为4.5、1.2 mm,因此使用标称焦距计算的地面分辨率值偏小。综合来看,本文中采用贴近摄影测量技术,获取了毫米级的影像数据,用于精细建模。
2.1.2 数据处理
剔除不合格影像后,使用摄影测量与计算机视觉软件对影像数据进行几何畸变校正、亮度匀光与颜色匀色等预处理后,进行空中三角测量,生成密集点云模型,构建不规则三角网,经影像匹配与纹理贴图后,将位置信息与颜色信息融合,建立了该露头的实景三维精细模型,保证了地理位置的正确性和场景的完整性,处理过程见图3,建模结果见图4。图4中三维模型精准地刻画了剖面岩体的三维形态特征、展布规律和产状变化,改正了传统方法识别范围不足、面貌不全、人工依赖大等缺陷。
2.2 剖面数字露头系统研发
上述三维模型依赖于特定软件,仅能在本地计算机上浏览,严重阻碍了数据的共享。因此本文中结合C/S、B/S架构的优点,以数字露头的实景三维模型为数据源,将三维模型转换为3D Tile格式,基于Web GL2.0,使用Electron技术搭建系统,通过Nginx技术代理本地文件,采用三维渲染引擎Cesium,研发了一个网络版数字露头三维信息分析系统,包含了预处理层、服务层、应用层和数据层四大模块。该系统允许任一用户既可以发布自建的模型数据,又能访问地理空间服务器上已有的模型数据,易于模型的集成、融合、数据的更新,实现了场景三维渲染、模型定位、点线面要素的标绘与量测、岩层产状要素查询、岩层分布范围提取等功能,见图5。该系统融合WebGL和全景VR技术,提高了数字地质露头信息的网络共享。
3 剖面岩层重构方法
为精确标识某一岩层的空间分布范围、展布特征,系统通过新建贴面的形式完成岩层面重构,为此,在复杂的空间场景中首先要确定贴面的范围。使用鼠标在计算机屏幕上依次点击待重构岩层的边界点,获取了点的二维屏幕坐标,对坐标进行排序,得到最大值和最小值,构成贴面范围外接矩形的角点坐标,将角点的屏幕坐标转换为世界坐标后,计算边界点所确定的空间平面方程。然后,将外接矩形进行细分割,对分割后的子矩形先进行空间点的加密,根据点与空间平面间的空间度量关系,进行特征点的判定,构成特征点集。最终,联合边界点和特征点集,构建三维Delaunay三角网,构成数字露头模型的贴面。总体技术路线如图6所示。
3.1 构建特征点集
特征点集为数字露头三维模型剖面向外凸出、向内凹陷的多个特征点构成的集合。区域内特征点选取的数量、典型性,影响着岩层贴面重构效果与真实状况是否一致。特征点集构建步骤如下:
(1)坐标转换。
鼠标点击三维模型时,获取点的二维屏幕坐标,计算通过屏幕点的视线与模型的交点,将此坐标转换为模型所在真实世界中的三维笛卡尔坐标,转换过程如图7所示。
(2)计算空间边界面。
点击虚拟场景中某一岩层时,Cesium引擎通过响应函数获取了岩层分布范围n个边界点的二维屏幕坐标,依图7转换为世界坐标后,构成边界坐标点集合,通过公式可确定一个空间平面f,此平面为多个边界点拟合而成的边界平面。
式中,n为边界点个数;xi、yi、zi为第i个边界点的世界坐标;a、b、c为系数。
当数字露头三维模型剖面坡度均一且光滑时,如建筑物的立面墙体,可用式(5)计算空间边界平面作为待重构岩层的贴面。但实际上露头剖面非光滑、坡度非均一,存在多处局部凸凹区域,且程度不一、范围不等,为一非规则空间曲面,依式(5)建立的空间平面拟合空间曲面时,空间平面会穿透岩层剖面上的凸起,从而呈现出孔洞、不连续的视觉效果(图8)。为改正上述缺陷,可用特征点构成的三角形拟合局部凸凹区域,因此特征点的选取与判定至关重要。
(3)判定特征点。
先通过均匀插值的形式加密点,再依据空间距离度量准则判定加密点是否为特征点,包含凸出点和凹陷点。将待拾取岩层的外接矩形进行m行m列的分割,得到m2塊大小相同的子块,记为ti(i=1,2,…,m2)。记录ti四个角点的二维屏幕坐标后,对ti进行均匀插值加密,每个ti获得s个插值点,因此整个外接矩形共计获得s×m2个加密点,将所有加密点的二维屏幕坐标转换为三维坐标。
对每个分割矩形ti计算出该矩形内s个插值点到空间平面的距离l。计算公式为
式中,l为距离;(x,y,z)为插值点坐标。
l取值为0时,插值点位于平面上;l取值为正时,插值点位于平面的左侧,反之位于右侧。以空间距离判断准则为依据,选取距离空间平面较近或者较远的r个点作为该分割矩形内的特征点,然后判断特征点的空间位置,位于重构范围内的点保留,否则舍去。该过程原理如图9所示。
每个分割矩形ti内的局部3D状况各不一致,既有凸起,也有凹陷,根据凹凸状况与边界平面的关系可分为3类,见图10。前2类为边界平面完全位于凹凸区域的右侧或左侧,第3类为前者中央穿越后者。边界平面与局部3D分别构成了凹陷区域、凸起区域、凹凸区域。3个区域中,加密点到边界平面的距离分别为正值、负值、有正有负。
若空间判定准则为最小距离,r取1时,则从s个加密点中判定出1个最高凸出点作为特征点;若准则为最大距离,则判定出1个最低凹陷点作为特征点。因此r取为1时,会忽略分割矩形ti内的次级凸起和凹陷,若局部3D起伏剧烈,则可以适当调整r,以增加特征点的判定数目,从而更好地拟合局部凹凸。但若分割矩形ti尺寸较小时,则判定出的特征点有可能聚集在一起。
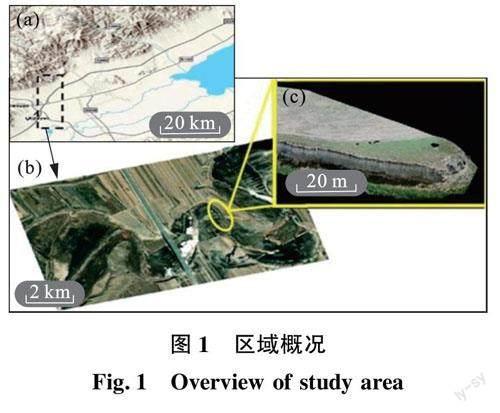
所有分割矩形内判别出的特征点构成了特征点集,见图11。图中将待重构岩层的外接矩形进行了3行3列的分割,共获取9个分割矩形,每一子矩形区域判定出2个特征点,总计获得18个特征点。因此m与r两因素共同决定了特征点的总数量,而特征点的数量决定了重构岩层面的质量。
采用上述方法处理图12中的三维数字露头模型,该对象为一明显凹陷区域,长度约为6 m,高度约为2.5 m,蓝色方框为待重构岩层范围,m、r分别取为6、2,以最小距离为空间判定准则,因此系统在36个子矩形区域内,每一区域逐一判定距离空间平面最近的2个凸出点为特征点,因2点间的空间距离较近,所以聚集在一起,空间分布质量低。综上所述,空间度量准则决定了特征点的判定状况与位置,外接矩形均匀分割,保证了特征点空间分布的均匀性。
3.2 构建贴面
三角网的大小和形态可根据界面复杂程度、模型精度进行调整,尤其是对断裂、褶皱和岩体等复杂界面有很好的拟合效果[25],所以建立不规则三角网,形成贴面,实现岩层的重构。本文中采用Delaunay剖分方法,构建三维不规则三角网,提取数字露头剖面信息,具体过程如下。
(1)扁平化。
经坐标转换后,获取地层范围边界点、分割矩形角点、数字露头剖面特征点在世界坐标系中的坐标值,上述点构成了三维数组W。在构建三角网时,为提高Web端的构网效率,将W进行扁平化处理,即每一点舍弃y坐标值,仅保留x、z值,得到二维离散点数组A。该过程在场景中的意义为摒弃近似垂直于露头剖面维度的坐标值,保留了平行于露头剖面两个维度的坐标值,确保扁平化后的点位于剖面近似标定的竖直面内。
(2)竖面三角构网。
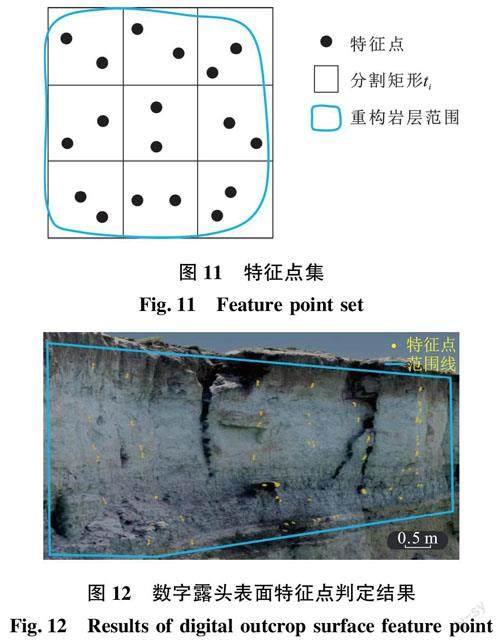
以二维数组A中的点为数据源,在x-z竖面内,采用逐点插入构网法构建二维三角网。假如区域内已有部分离散点构成了初始三角网,见图13(a),现有一新离散点P参与三角网重构时,需先将P点放入离散点数组A中。而后在三角形数组B中寻找三角形,此三角形的外接圆包含P点,为插入点的影响三角形,将插入点P与所有影响三角形的顶点连接,构成新三角形,见图13(b);对新生成的三角形进行局部优化,即进行最大化最小角特性的检查,通过交换边的方式,确保形成Delaunay三角形,见图13(c),将新构成的三角形及其边分别放入三角形数组B、边数组C中。
逐点插入构网法中,为建立初始三角网,首先初始化二维剖面离散点数组A,即先对A中所有点的x坐标值按照大小依次排序,而后建立一个辅助矩形窗口R,包含A中所有点。连接R的任意一条对角线,形成两个三角形,作为初始三角形。运用逐点插入构网法,将A中各个点按由小到大的顺序,依次构建三角网,见图13(d)。当A中所有点都已构建三角网后,在三角形数组B中查找辅助窗口R的角点位于哪些三角形中,将这些三角形删除,结果如图13(a),其总体实现过程可见图14。
(3)三角网空间化。
因二维三角网位于竖直面内,与岩层面不吻合,故需要将已构二维三角网投影至岩层面上,形成空间三角网。对照三维数组W,搜寻三角形数组B中每个点对应的第三维坐标值,将二维坐标点膨胀为三维坐标点,重新构成三维数组B0,包含一个三角形三个顶点的三维坐标;依据数组B0中的三维坐标,将二维平面三角网向空间三维膨胀,完成空间Delaunay三角网的构建。即相互连接的空间三角网,构成了Web端大坡度数字露头三维模型的贴面,从而准确地标识出重构岩层的范围,有效地约束了构造的形态,为地质资料知识库构建提供辅助手段与数据支撑。
4 剖面岩层重构结果分析
4.1 结果验证
为验证上述方法的有效性,在图4所示的三维模型中选择一局部复杂场景作为试验对象,见图15。图15中剖面长度约为8 m,高度约为5 m,坡度高达88°;平面上,露头在1、2点处发生明显转折,角度分别为126°、108°;剖面上,1、2点下方存在两处凸棱,凸棱由顶到底高度分别为3.3、1.4 m;凸凹最大差距,即1点到虚线的距离约为1 m。
剖面岩层重构时,m、r分别设置为16、2,子矩形区域的空间尺寸约为0.5 m×0.3 m,图15中共计判定出512个特征点,联合4个边界点,共同参与三角网的构建,建网结果如图15(b)中红色曲面。由该图可以看出,构建的三角网贴合在三维模型表面,实现了选取范围内岩层面的重构,建模结果直观可视。试验中选取岩层范围约40 m2,因筛选出的特定点有限,构建的三角形数目偏少,导致局部吻合性不佳;此外,有的特征点聚集在一起,致使构建的三角形存在着角度过小的现象,表现为细长的尖片。
理论上m取值足够小时,筛选的特征點与精细模型上的点云数据近乎一致,构建的贴面与实际模型吻合性最佳,即贴面效果与精细模型效果一致,但此时系统的运行速度较慢。因此应综合考虑三维模型的大小、复杂程度,三角形的大小和形态、三角网在Cesium引擎中的构建效率,贴面的拟合效果等因素,设置合适的阈值,增加多个空间度量准则,各因素共同作用下判定出合理的特征点,在虚拟场景中构建出兼顾应用需求与运行效率的模型贴面。
4.2 对比验证
为评价本文方法的性能,选取小范围平整岩层、大范围平整岩层、凹凸岩层3种场景,分别使用Cesium内置方法、边界面法与本文方法构建岩层面,结果分别如图16~18所示,图中黑色方框为重构岩层的范围,红色阴影为构建的贴面。
由各图看出,无论何种模型,Cesium内置方法因点位计算错误,构建的贴面范围远超出指定范围,即位置不正确。范围内部,仅坡度较均一的局部区域建立了贴面;范围外部,部分岩层面因与范围内部的局部岩层坡度一致性、连通性好,内外部建立的贴面串联在一起。总体上看,无论范围内外,建立的贴面形状不规则,呈现片状、条状,大小不一,连续性差,与实际严重不符。边界面法首先获取范围边界点的坐标,避免了点位计算错误,计算边界点确立的平面方程,以边界平面拟合范围内的岩层,所以贴面范围基本准确,范围内部贴面会穿透岩层剖面上的凸起,从而呈现出孔洞、不连续的视觉效果,这一点与Cesium自带方法类似,但孔洞面积略有减少,范围外部仅边界线的局部建立了贴面,贴面效果略优于前一方法。本文方法完全避免了上述缺点,构建的贴面不仅位置准确,而且连续性好,除边缘局部外,与实际地层范围一致,效果最优。
为定量评价各种方法的优劣,从图像处理的角度引入内部正确率(Ra)、外部错误率(Re)与内部破碎度(Df)3个指标。Ra、Re的含义分别为方框内部、外部构建的贴面面积与方框内部总面积的比值;Df的含义为方框内部所建贴面的破碎与离散程度。3种模型定量评价结果见图19(其中,[1]表示小范围平整岩层,[2]表示大范围平整岩层,[3]表示凹凸岩层)。
式中,Ntotal为方框内部像元总数;Ninside_red、Noutside_red为方框内部、外部红色像元总数;n为方框内部红色斑块的个数;Ri为第i斑块的最小外接矩形中非红色像素面积;S为斑块总面积。
由图19可以看出,内部正确率方面,无论何种模型,3种方法中Cesium内置方法较低,取值范围为0.14~0.40;边界面法居中,取值范围为0.25~0.50;本文方法最高,取值范围为0.95~0.99。外部错误率与内部破碎度方面,从高到低依次为Cesium内置方法、边界面法、本文方法。3种方法中,Cesium内置方法随着模型复杂性的提高,其内部正确率与外部错误率都有所上升,但内部破碎度下降,说明此方法在处理复杂场景较简单场景性能略优;边界面方法与Cesium内置方法相比,除大范围平整岩层模型中内部正确率降低外,其他定量指标都优于后者,错误率方面更是显著降低。较前两种方法,本文方法正确率最高、错误率与破碎度最低,相对于平整岩层模型,该方法在处理凹凸岩层等复杂场景时,性能尤为优越,正确率高达0.99,错误率与破碎度几乎低至0。
总之,无论在何种情况下,Cesium引擎内置方法构建的贴面范围不准确、连续性差、破碎度高,与实际相差甚远,究其原因为该引擎投影方向为自上而下,上方凸出的岩石、植被等遮挡下方,造成点位计算错误,贴面建立时形成空白区。边界面法能准确地获取范围边界点的坐标,所以确立的贴面范围准确,但以空间平面拟合曲面,会穿透岩石上的凸起,视觉上形成贴面的空白区,所以各个模型中破碎度指标值较大。本文方法充分考虑到岩层剖面的凸起与凹陷,通过分区块自行判定特征点,顾及特征点与边界点,重新构建三维Delaunay三角网,形成一连续贴面,完成了岩层的精细重构,因此能避免Cesium引擎内置方法、边界面法的缺陷,完全适用于大坡度、大范围、岩层面凹凸众多、坡度不均一的复杂露头,具有更好的视觉效果,更高的性能指標,为空间位置统计、范围标定、面积量测等空间信息提取功能的实现奠定了坚实的基础。
5 结 论
(1) 使用贴近摄影测量技术,检校相机,获取实际焦距,合理规划航线,在一定的航高限定下,可获取高达毫米级别分辨率的影像,图像信息与点位信息耦合,建立逼真、精细的三维数字露头模型,提高了三维地质建模的高效性和精准性,能有效克服野外地质调查危险性高、环境影响大、工作效率低等问题。基于三维模型,综合采用Electron、Nginx和Cesium研发了数字露头三维信息分析系统,实现了露头考察数据的共享化、综合化和可更新化。
(2) 提出的自动判定剖面岩层特征点的新方法通过系统交互获取待重构岩层边界点的二维屏幕坐标,确定重构范围,对此范围进行坐标点的加密,经坐标转换后,通过最小二乘原理计算边界点所拟合的边界平面,依次计算加密点至边界平面的空间距离,顾及空间场景的局部3D凸凹状况,距离最近或者最远的若干个点被判定为特征点,为岩层面重构提供数据基础。
(3) 在Web虚拟场景上,采用微分的思想,逐点插入加密构面。以特征点和边界点为数据源,先在x-z竖面内构建平面三角网,平面三角形向空间生长,构成三维Delaunay三角网,在三维模型表面形成了一个贴面,实现了剖面岩层的重构。该方法重构的岩层范围正确,内部连续,结果清晰,整体效果俱佳,可以为地质资料知识库构建提供辅助手段与数据支撑。
参考文献:
[1]印森林,高阳,胡张明,等.基于无人机倾斜摄影的露头多点地质统计模拟:以山西吕梁坪头乡石盒子组为例[J].石油学报,2021,42(2):198-216.
YIN Senlin, GAO Yang, HU Zhangming, et al. Multiple-point geostatistical simulation of outcrop based on UAV oblique photographic data: a case study of Shihezi Formation in Pingtou township, Lüliang city, Shanxi[J]. Acta Petrolei Sinica, 2021,42(2):198-216.
[2]CHNE J H, WANG B Q, WANG F, et al. Identification of outcropping strata from UAV oblique photogrammetric data using a spatial case-based reasoning model[J]. International Journal of Applied Earth Observation and Geoinformation, 2021,103:102450.
[3]NESBIT P R, DURKIN P R, HUGENHOLTZ C H. 3-D stratigraphic mapping using a digital outcrop model derived from UAV images and structure from motion photogrammetry[J]. Geosphere, 2018,14(6):1-18.
[4]BELLIAN J A, KERANS C, JENNETTE D C. Digital outcrop models: applications of terrestrial scanning lidar technology in stratigraphic modeling[J]. Journal of Sedimentary Research, 2005,75(2):166-176.
[5]杨茂伟.高精度影像扫描仪在边坡稳定性分析中的应用[J].测绘通报,2019(2):153-156.
YANG Maowei. Application of high-precision image scanner in slope stability analysis[J]. Mapping Bulletin, 2019(2):153-156.
[6]印森林,陈强路,袁坤,等.基于无人机倾斜摄影的碳酸盐岩生物礁露头多尺度非均质性表征:以鄂西利川见天村露头为例[J].天然气地球科学,2022,33(9):1518-1531.
YIN Senlin,CHEN Qianglu, YUAN Kun, et al. Characterization of multi-scale heterogeneity of carbonate reef outcrop by UAV oblique photography: case study of Jiantian Village, Lichuan, western Hubei[J]. Natural Gas Geoscience,2022,33(9):1518-1531.
[7]MENEGONI N, GIORDAN D, PEROTTI C, et al. Detection and geometric characterization of rock mass discontinuities using a 3D high-resolution digital outcrop model generated from RPAS imagery Ormea rock slope, Italy[J]. Engineering Geology, 2019,252:145-163.
[8]张春森,张卫龙,郭丙轩,等.倾斜影像的三维纹理快速重建[J].测绘学报,2015,44(7):782-790.
ZHANG Chunsen, ZHANG Weilong, GUO Bingxuan, et al. Rapidly 3D texture reconstruction based on oblique photography[J]. Acta Geomatica, 2015,44(7):782-790.
[9]何佳男.贴近摄影测量及其关键技术研究[D].武汉:武汉大学,2019.
HE Jianan. Nap-of-the object photogrammetry and its key techniques[D]. Wuhan: Wuhan University,2019.
[10]言司.独辟蹊径,不断创新,贴近摄影测量:第三种摄影测量方式的诞生[J].中国测绘,2019,10:31-37.
YAN Si. Inventive, innovative, close to photogrammetry: the birth of the third photogrammetry[J]. China Mapping, 2019,10:31-37.
[11]张力,刘玉轩,孙洋杰,等.数字航空摄影三维重建理论与技术发展综述[J].测绘学报,2022,51(7):1437-1457.
ZHANG Li, LIU Yuxuan, SUN Yangjie, et al. A Review of developments in the theory and technology of three-dimensional reconstruction in digital aerial photoprammetry[J]. Acta Geodaetica et Cartographica Sinica, 2022,51(7):1437-1457.
[12]盛輝,段政明,刘善伟,等.大坡度地质露头高分辨率无人机影像采集方法与建模实践[J].古地理学报,2020,22(4):799-806.
SHENG Hui, DUAN Zhengming, LIU Shanwei, et al. High resolution UAV image acquisition method and modeling practice for geological outcrop with a large slope[J]. Journal of Palaeogeography, 2020,22(4):799-806.
[13]RUZICKOVA K, RUZICKA J, BITTA J. A new GIS-compatible methodology for visibility analysis in digital surface models of earth sites[J]. Geoscience Frontiers, 2021:101109.
[14]ZHAN W, CHEN Y, CHEN J. 3D tiles-based high-efficiency visualization method for complex BIM models on the web[J]. International Journal of Geo-Information, 2021,10:476.
[15]张颖慧,MORELLI R,郭磊,等.中加基岩地质填图与三维地质建模合作交流经验与启示[J].地质通报,2018,37(2/3):314-324.
ZHANG Yinghui, MORELLI R, GUO Lei, et al. Experience and enlightenment of cooperation in bedrock mapping and three-dimensional geological modelling with Saskatchewan geological survey, Canada[J]. Geological Bulletin of China, 2018,37(2/3): 314-324.
[16]CLARKG F. A visualization tool for citizen-science marine debris big data[J]. Water International, 2021,46(2):211-223.
[17]李凌昊.基于Cesium的数字露头信息提取桌面系统的研究与实现[D].青岛:中国石油大学(华东),2022.
LI Linghao. Research and implementation of digital outcrop information extraction desktop system based on Cesium [D]. Qingdao: China University of Petroleum(East China),2022.
[18]HU Z H, GUO J, ZHANG X Q. Three-dimensional (3D) parametric modeling and organization for web-based visualization of city-scale pipe network[J]. ISPRS International Journal of Geo-Information, 2020,9:623.
[19]WANG X, JI S P. Roof plane segmentation from Lidar point cloud data using region expansion based L0 gradient minimization and graph cut[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2021,14:10101-10116.
[20]CHEN H, CHEN W L, WU R J, et al. Plane segmentation for a building roof combining deep learning and the RANSAC method from a 3D point cloud[J]. Journal of Electronic Imaging, 2021,30:053022.
[21]雷传扬,刘兆鑫,文辉,等.基于多源数据和先验知识约束的复杂地质体三维建模研究[J].地质评论,2022,68(4):1393-1410.
LEI Chuanyang, LIU Zhaoxin,WEN Hui, et al. Research on 3D geological modeling of complex geological body based on multi-source data and prior geological knowledge[J]. Geological Review,2022,68(4):1393-1410.
[22]WANG Z H, LIN W L, DING R X. Quantitative measurement of bedding orientation using remote sensing data: Yili Basin, Northwest China[J]. Journal of Earth Science,2018,29(3):689-694.
[23]TRIAS A, DANY L, FEBRIAN F S, et al. Visualization of 3D survey data for strata titles[J]. ISPRS International Journal of Geo-Information, 2020,9:310.
[24]DUAN Y S, HE J N, LU Y H, et al. Analysis of the factors affecting airborne digital sensor image quality[J]. IEEE Acces, 2019,7:8018-8027.
[25]ZHAO Z P, CHENG C T, JIN X Y, et al. A MILP model for hydro unit commitment with irregular vibration zones based on the constrained Delaunay triangulation method[J]. International Journal of Electrical Power & Energy Systems, 2020,123:106241.
(編辑 修荣荣)
收稿日期:2022-07-26
基金项目:中石油重大科技项目(ZD2019-183-006)
第一作者:郑红霞(1980-),女,讲师,博士,研究方向为三维地质建模。E-mail:zhenghongxia@upc.edu.cn。
通信作者:盛辉(1972-),男,副教授,博士,研究方向为摄影测量与遥感地学应用。E-mail:sheng@upc.edu.cn。