机械通气中患者人机不同步研究进展
2023-08-31张巍胡知诿马小建深圳迈瑞生物医疗电子股份有限公司广东深圳518057
张巍 胡知诿 马小建 深圳迈瑞生物医疗电子股份有限公司 (广东 深圳 518057)
内容提要: 呼吸机机械通气作为维持患者生命的重要医疗手段,主要作用为改善患者气体交换、降低呼吸肌负荷及提高患者舒适度。患者在机械通气期间需要与呼吸机统一协调,二者交互达到最佳状态时才能保证其治疗效果。文章简要介绍人机不同步的研究进展,并总结临床上常见的人机不同步类型,不同类型事件对应的影响因素以及处理方法。根据人机不同步的临床识别提出一种集成于呼吸机监测和识别的功能理念,将人机不同步在呼吸机机械通气的过程中直观地展现并且量化,为临床医生提供参考,以减少人机不同步事件的发生。
人机不同步是指患者进行呼吸机机械通气的过程中,由于整个呼吸周期中神经和呼吸机定时不匹配或者呼吸机支持力度和需求不匹配,造成的患者与呼吸机之间不协调的现象。
人机不同步这一概念早在20世纪70年代被提出,并简单地被定义为患者与呼吸机之间的对抗[1]。随着机械通气技术的发展,人机不同步概念进一步细化为患者与呼吸机辅助通气的不同步以及呼吸机与患者流量需求之间的不匹配。随后有学者将在临床采集到的具有同样一类特征的人机不同步波形展示出来,为这一类波形进行文字描述,并明确这种异常波形是可以被实时监测到的,这种发现给很多学者指明了方向[2]。越来越多的学者开始转向于在临床中发现并记录人机不同步异常波形,研究人机不同步事件的种类与判断规则。
在随后的30年中,人机不同步得到了更多的临床关注。更多的研究发现,人机不同步不仅发生在机械通气的成人患者身上,在小儿以及新生儿患者机械通气过程中也同样存在,并且越来越多的人机不同步事件类型和判断规则也被确定。随着人机不同步事件类型以及判断规则逐渐统一,学者们开始尝试通过软件来实现人机不同步事件的监测,并在2011年对第一款人机不同步分析软件BetterCare进行了临床验证[3,4]。最终BetterCare软件识别人机不同步事件的程度达到敏感度91.5%,特异度91.7%,阳性预测率80.3%,阴性预测率96.7%[5]。
呼吸机在进行机械通气过程中,当患者有较强的自主呼吸且呼吸机提供的呼吸支持与患者自主呼吸不协调时,即发生了人机不同步,会引起患者的通气不适。但并非所有患者都如此,有些则是由于深度镇静引起的[6]。高发生率的人机不同步可能会导致患者呼吸困难、呼吸机撤机困难以及机械通气时间延长等问题。因此明确人机不同步事件的分类,加强对人机不同步的监测并以此调整呼吸机肺保护通气策略对患者的通气治疗是非常有用的。本文总结了目前关于人机不同步的类型和定义,并探讨了相关人机不同步事件最新的监测方法。
1.人机不同步的类型、识别及处理
机械通气期间的人机不同步涉及两个方面:①患者的呼吸肌:由呼吸中枢控制,受呼吸力学影响。②呼吸机:受呼吸机本身运行以及使用者对通气参数的调整的影响[7]。
患者按呼吸驱动力强弱分为两种形态:低呼吸驱动和高呼吸驱动。呼吸机按照呼吸相的控制可以分四个阶段:触发、吸气相、吸呼切换和呼气相。其中呼气阶段属机械被动期,实际与患者主动交互的是触发、吸气相和吸呼切换三个阶段。临床中常见的人机不同步事件按照患者呼吸驱动和呼吸相进行汇总分类见表1。

表1.常见人机不同步事件汇总表(以患者呼吸驱动和呼吸相分类)
另外,人机不同步也可分为触发不同步、流速不同步和循环不同步。其中触发不同步包括双触发、反向触发、误触发、无效触发呼吸;流速不同步包括流速过小;循环不同步包括触发延迟、切换过早和切换延迟。
将人机不同步进行分类有助于明确患者需求及事件的严重程度,从而采取不同的方法来应对不同的事件。
1.1 无效触发
当患者触发呼吸机时,患者胸腔内容量增加,导致气道压力下降和气流增加。如果压力(称为压力触发)或流量(称为流速触发)达到临床医生设定的阈值,则呼吸机进行机控通气。在某些情况下,患者希望(或尝试)开始呼吸并触发呼吸机,但这种情况失败。这可能与呼吸机无法检测患者的努力进行机械通气有关。
无效触发被定义为当患者产生吸气动作,呼吸机无法识别患者吸气导致无法向患者供气。无效触发通过使用食道压或者膈肌电进行识别。当食道压出现负偏转或膈肌电活动显著增加,但没有触发机械通气,可以判断为无效触发。但在大多数情况下,通过检查呼吸机屏幕上的流量-时间波形和气道压力-时间波形,就可以无创地识别无效的努力。无效触发典型波形图示见图1,主要特征是由于患者的吸气努力而在压力-时间波形中产生气道压降,并产生吸气流量,但呼吸机未触发机械通气。
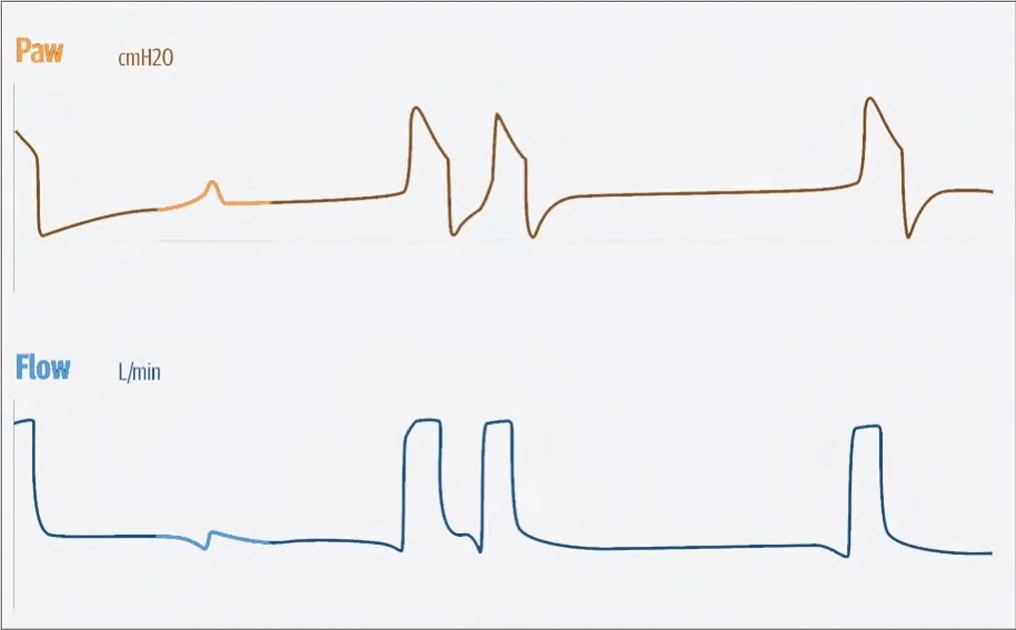
图1.无效触发典型波形图示
导致无效触发发生的原因大致有:患者对触发灵敏度的努力太弱(呼吸驱动下降),吸气触发灵敏度设置过高;也可能由患者因素导致,比如阻塞性肺病患者由于气体陷闭形成内源性呼末正压,进而导致触发无效;再如代谢性碱中毒的患者会产生神经-呼吸系统抑制,进而导致无效吸气努力;还有临床中使用的镇静剂也会降低呼吸驱动进而导致无效吸气努力,有研究发现,镇静深度和无效触发指数呈正相关;此外,呼吸机参数设置也是导致无效触发的因素,比如呼吸机设定的吸气时间大于患者自主吸气时间时,辅助通气的压力支持水平过高,压力支持时存在漏气等[8]。
因此,当临床上发现无效触发时,医生应当检查呼吸机的触发灵敏度设置并适当调节,使用镇静剂的情况下也应仔细检查并优化镇静程度,检查呼吸机其他参数的设置避免过度通气,以尽量减少内源性呼末正压,因为如果内源性呼末正压较高,患者触发呼吸机呼吸所需的负压也会很高。
1.2 误触发
在某些情况下,患者没有尝试呼吸,呼吸机也会自行触发呼吸,这种情况被称为误触发。误触发被定义为患者并未产生吸气努力,但是呼吸机有机控的气道压和流速的输送。误触发也可以通过食道压或者膈肌电进行识别,当食道压未出现负偏转或膈肌电活动未增加,但触发了机械通气,可以判断为误触发[8]。
误触发是由于呼吸机感知到压力或流量的变化而引起的,与患者的吸气努力无关,在患者-呼吸机回路中出现泄漏的情况下,泄漏会通过以下两种方式导致误触发:①对于流量触发的机械通气,触发是感知到呼吸机回路呼气支路中的气流减少。②对于压力触发的机械通气,触发是泄漏引起的压力充分下降。在触发设置非常灵敏的情况下,通过气管壁传递的气流变化可能会被误解为患者的吸气努力并触发机械呼吸。误触发典型波形图示见图2。
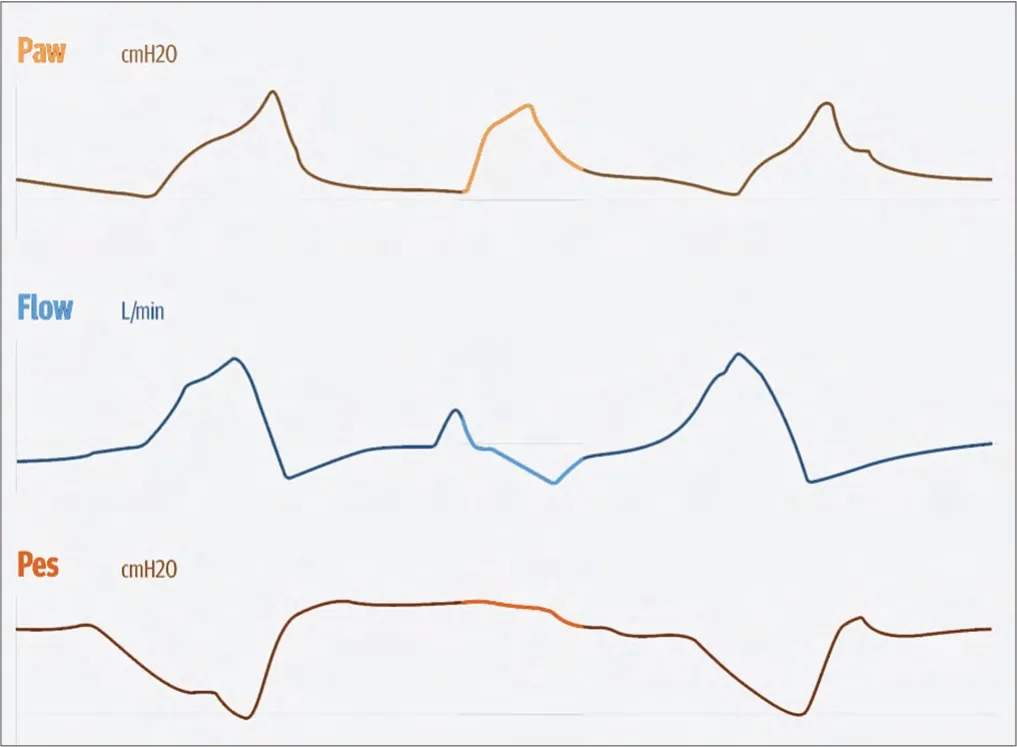
图2.误触发典型波形图示
导致误触发发生的原因可能是由于呼吸机管路中存在干扰,如冷凝水、泄漏或患者的咳嗽,这些因素导致气道压力急剧下降,从而触发了呼吸机,进入了吸气阶段[8]。因此,当临床上发现误触发时,医生应当检查呼吸机管路中是否有冷凝水,是否存在泄漏,并检测患者通气的状况,患者的生理情况(是否有心脏振荡)。
1.3 双触发
当呼吸机停止送气时,患者仍然继续吸气动作,呼吸肌肉的收缩对抗了肺泡的弹性回缩力,使气道压力下降到触发灵敏度以下,短时间内再次触发吸气,双触发被定义为“两个周期,间隔很短的呼气时间”。
双触发包含两次吸气,中间伴一次很短的呼气,是由于患者通气需求很高,加上呼吸机吸气时间相对患者自主吸气时间过短,造成两个吸气周期和一个受限的呼气阶段。所以双触发可以很简单地通过无创的流速-时间波形或压力-时间波形进行识别判断。双触发典型波形图示见图3。
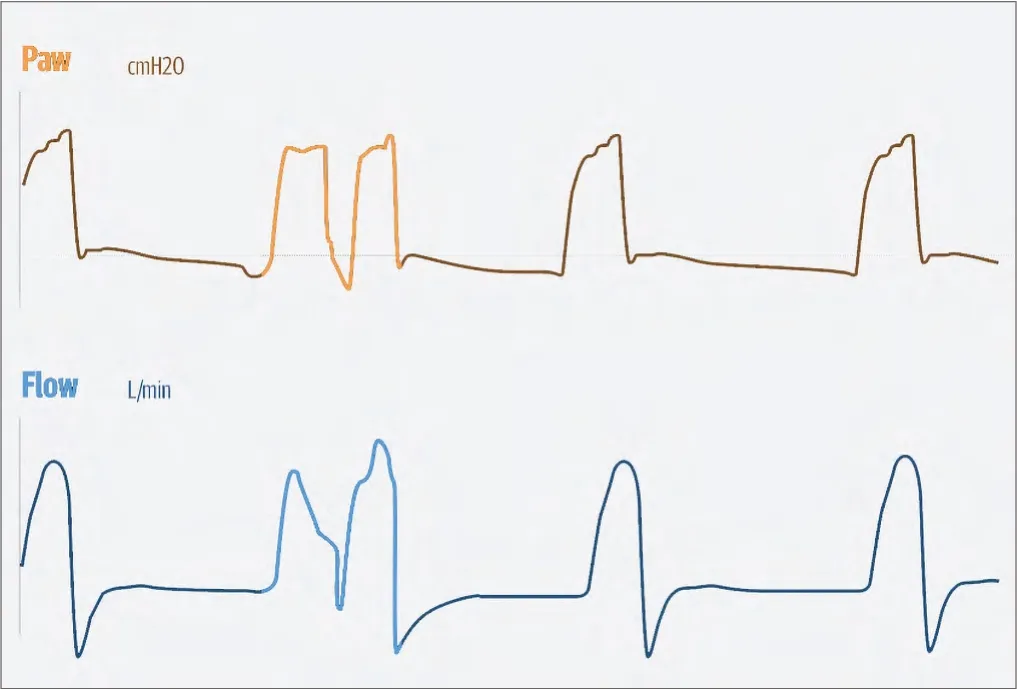
图3.双触发典型波形图示
导致双触发发生的原因可能有:患者的生理吸气时间超过呼吸机设置的吸气时间,患者有较高的流量需求而呼吸机的流速和潮气量设置较低,患者的肺顺应性低等[8]。因此,当临床上发现双触发时,医生应检查呼吸机的吸气时间、吸气流速或潮气量设置是否合理,关注患者的肺顺应性。
1.4 反向触发
反向触发被定义为被动机械通气后出现呼吸肌收缩,收缩类似由呼吸机“触发”,这种现象可能构成呼吸节律的定期夹带(锁相)到周期性送气[9]。反向触发是一种比较难识别的人机不同步。在反向触发期间,呼吸机触发呼吸的开始与患者吸气努力的开始之间存在延迟。因此,当吸气阶段完成时,患者的努力通常会持续存在,如果患者的吸气努力能够克服设置灵敏度的阈值,则可能会产生双重触发。
重度镇静的患者中,呼吸机的机械通气会触发患者肌肉用力,这种情况就会出现反向触发。常规的呼吸机压力和流速波形上很难识别,需要通过食道信号(横膈膜的电活动和/或食道压力)才能比较好地识别。反向触发典型波形图示见图4。

图4.反向触发典型波形图示
导致反向触发的主要原因主要有机械辅助通气过度或重度镇静,所以医生在发现这种人机不同步事件时应减少通气辅助、减少镇静剂、必要时减少肌肉麻痹。
1.5 流速饥渴
流速饥渴可以直观解释为当呼吸机的流速输出无法满足患者的需求。在容量控制通气模式中,设置吸气流速后,该参数不能随着患者的吸气需求改变。而在压力控制通气模式中,流速会随着患者的吸气变化而变化,属于非预设参数。所以流速饥渴的识别需要区分容量控制和压力控制两种模式[8]。
在容量控制通气模式下,患者的吸气努力无法增加吸气流量,而随着这努力的增加,气道压力随之降低,使压力波形呈现出特征性的“掏空”表现。典型表现(见图5)为气道压力-时间曲线出现勺状波形,并且患者吸气用力越强,勺状变形越明显。在容量控制通气模式下出现流速饥渴时,可以根据波形进行调节吸气流速设定,以恢复波形曲线的形状。

图5.容量控制通气模式下流速饥渴典型波形图示
在压力控制通气模式下,吸气流速为非预设值,影响吸气流速的影响因素主要有:设置的吸气压力、患者吸气努力、呼吸系统的顺应性与阻力、压力上升时间。相对于一定的患者吸气努力下,若压力上升时间较慢时,气道压力-时间波形曲线可能会出现勺状变形,即此时不满足患者的吸气需求。所以临床需要根据患者的吸气努力程度调整吸气压力设置和压力上升时间设置,使得压力曲线上升段平滑、较快达到设置气道压力并维持短暂的平台压。
1.6 其他的人机不同步
以上五类人机不同步的类型、识别和处理方式都是临床上比较公认的。此外,从呼吸机本身和呼吸相两方面的分析,人机不同步事件还有延迟触发、切换过早和切换延迟三类。但是这三类事件需要结合食道压波形判定,目前没有统一明确的食道压波形特征进行判定,因此还没有形成临床公认的识别方法。
延迟触发是患者努力吸气和呼吸机送气之间的时间差延长,是呼吸驱动和吸气触发之间的典型不同步。进行食道压或膈肌电监测来识别时,则表示从食道压力降低或开始神经吸气到气流或气道压突然升高(开始机械吸气)之间经过的时间。触发延迟是由灵敏度设置不当和呼末正压不足以引起微调触发引起的,正常情况下,触发延迟应<100ms。一般可以通过调节触发灵敏度、设置合适的潮气量以及应用呼末正压来减小触发延迟。
由于患者神经和呼吸机吸气时间匹配不好,导致过早或过迟的呼吸切换。当患者的神经吸气时间超过呼吸机吸气时间时,称为切换过早。一般压力支持通气模式下高呼气触发灵敏度可能会导致吸气时间短并导致切换过早。如果患者的努力吸气超过了呼吸机送气的时间,则可能还会产生双吸气。
当呼吸机吸气时间超过患者的神经吸气时间时,称为切换过迟。切换过迟时,气道压力-时间曲线表现为吸气末压力上升,流速-时间曲线表现为吸气末流速迅速下降,且压力上升与流速下降同时发生。医生在面对这种人机不同步事件时,可以对吸气时间进行设置,之后再根据压力和流速曲线进行调整,且对于压力支持通气模式可以对呼气触发灵敏度进行设置。
2.人机不同步的量化及标识
由于人机不同步与患者的通气舒适性息息相关,所以不仅仅需要识别人机不同步事件,还需要对事件的发生率进行统计分析,以明确事件的发生频次及严重程度。
目前普遍人机不同步事件通过发生率来量化,采用人机不同步指数(AI%)来表示,该指数是将各类不同步事件除以总呼吸计数得到的,即呼吸机通气周期和无效触发呼吸的总和,以百分比表示。计算公式如:人机不同步指数(AI%)=人机不同步事件数/(总呼吸机通气次数+无效次数)×100%。在AI%>10%可能会引起患者不适,呼吸做功增加或膈肌能量浪费,并且导致脱机时间延长[10]。
虽然部分临床医生具备相关的人机不同步识别方法,但医生并不是时刻在床旁监测,可能在患者与呼吸机产生不同步时,并不能及时发现并采取措施,所以需要额外的工具辅助医生对事件进行识别与统计。根据现有的识别方法的归纳,呼吸机机械通气的流量/压力波形是最容易获得的,并且越来越多的呼吸机也具备食道压的监测功能,只需将专业的临床知识转化为软件识别算法,在呼吸机通气过程中对流速-时间、气道压力-时间和食道压力-时间波形曲线进行分析,并对人机不同步事件进行识别、标注和量化,就能将专业识别技术普遍化,将人机不同步直观地展现出来并且量化,医生根据识别结果进行进一步的处理措施。由此保证机械通气技术的治疗效果,提高患者的护理质量。
3.小结
人机不同步是一种常见的多态性事件,可能发生在整个呼吸周期的任何阶段。各种类型的不同步有不同的影响因素,并且需要不同的管理措施。人机不同步过多可能会对呼吸肌造成高负荷、导致肌肉疲劳,引起患者的通气不适等,所以让使用呼吸机的医护人员直观地了解人机不同步事件的识别和相关处理措施显得格外重要。
本文简要地介绍了人机不同步的发展,并总结了临床上常见的人机不同步类型,以及不同类型对应的影响因素以及处理方法。根据人机不同步的临床识别提出一种集成于呼吸机的监测和识别的功能理念,将人机不同步在呼吸机机械通气的过程中直观地展现并且量化。可以使一般的医护人员能够识别人机不同步的类型、发生情况和严重程度。了解患者需求-呼吸机输送不匹配的性质并相应地调整呼吸机来纠正人机不同步,提高临床上发现和减少人机不同步。辅助医生实施科学有效的管理策略,保证机械通气技术的治疗效果,提高患者的护理质量。
