人机合作背景下建筑机器人的施工策略研究*
2023-08-26陈琳欣郭红领
段 瀚,陈琳欣,郭红领
(1.清华大学建设管理系,北京 100084; 2.广东博嘉拓建筑科技有限公司,广东 佛山 528000;3.广东博智林机器人有限公司,广东 佛山 528000)
0 引言
近年来,国家发布多项指导意见,鼓励和推广建筑业与人工智能、数字技术等深度融合。2020年7月,住房和城乡建设部发布《关于推动智能建造与建筑工业化协同发展的指导意见》,以建筑业高质量发展为整体目标,以建筑工业化为载体,借助智能化、数字化技术手段,拓宽智能建造在施工生产环节的应用。2023年2月,国务院印发《质量强国建设纲要》,强调社会发展重心由量向质的演进,鼓励建筑业加大先进建造技术前瞻性研究力度和研发投入,同时通过先进建造设备和智能建造方式的推广与应用,提升建设工程质量水平与安全性能。
与此同时,当前新一代信息技术、材料技术、生物技术等科技发展,为机器人产业的升级换代注入强劲动力,机器人俨然成为建筑业智能化的重要抓手,具备十分重要的研究与应用价值。2021年12月工业和信息化部等15个部委印发《“十四五”机器人产业发展规划》,提出加强机器人核心技术攻关,夯实产业发展基础,增加高端产品供给,拓展应用深度、广度,优化产业组织结构等主要任务,推动建筑机器人向中高端发展。2023年1月工业和信息化部等17个部门联合发布《“机器人+”应用行动实施方案》,旨在深化重点领域“机器人+”应用,提出研制覆盖建筑生产全周期的作业类、运输类、安装类等建筑机器人产品,并提高机器人对特殊自然条件、大型复杂场景的适应性。
建筑机器人机械装置由电器设备、电气系统、电气传动控制装置、末端系统执行机构等组成,集成传感、视觉、导航、作业控制系统、算法等技术实现自主作业(见图1)。建筑机器人及相关技术的融合发展进一步推动了施工生产自动化与数字化,形成涵盖设计、生产、管理、运维全周期的智能建造模式。建筑机器人+BIM技术,随着工程进展最终形成面向建筑生命周期的完整建筑信息模型[1],其通过将建筑全生命周期过程中产生的信息数字化,充分利用先进的数字技术,从全行业角度进行变革创新[2]。BIM是一个包含建设项目物理特性与功能特性的数字模型[3],既能为建筑机器人提供准确施工路径,也能有效规避施工流水间相互冲突。另外,建筑机器人多机联动技术的发展也将进一步释放生产力。以墙砖铺贴作业为例,在工序移交阶段,测量机器人借助视觉、传感等技术对移交工作面空间数据进行复测,同步对深化设计进行二次修正,增强设计与生产环节间的协同,突出数字化设计与建筑物理状态的实时交互性;同时,测量机器人可生成质量热力图,并通过云端共享数据,为打磨机器人的作业提供准确作业定位等参数,有效提高打磨修补效率和质量。建筑机器人本体技术及相关技术的成果与发展,不仅将传统劳动力从危险、繁重体力劳动中解放出来,而且推动了产业链条数字化、自动化、智能化的转变,优化工程进度、成本、资源、安全的管理,以实现工程精细化管理[4]。
尽管我国建筑机器人的研发与应用已取得一定成果,但在机器人深度应用方面还存在诸多障碍。本文以墙面瓷砖铺贴工程为例,通过分析传统施工作业特点及问题,研究建筑机器人技术对传统施工生产方式的优化方式及相应人机合作策略,为建筑机器人深度应用提供参考。
1 墙面瓷砖铺贴施工特点分析
1.1 组织特征
我国建筑业经过长期发展,已形成木工、油工、瓦工等主要工种及工序分工。在较稳定生产水平下,施工工序划分相对固化,生产主体通常根据作业工艺、作业条件、管理难度等进行工序划分。但这种粗放组织方式在一定程度上限制了分工的细化发展。
在住宅装修领域,由于量价关系、施工管理等因素,墙砖与地砖铺贴通常呈统一发包与承包的特征(见图2)。首先,墙砖铺贴相对于地砖铺贴施工难度更大,因此其人工单价一般比地砖铺贴作业高。出于对量价关系的考量,市场偏好将墙砖、地砖铺贴工程进行统一发(承)包,以降低成本投入。其次,墙砖与地砖铺贴具有较高互通性,统一承包、发包能降低生产各方管理难度,有利于提高各方沟通效率。因此,墙砖与地砖铺贴长期以来在市场上一般呈现出整体性发包与承包组织特征,而这种组织特征也使墙砖铺贴工序难以进一步细化。

图2 传统墙砖铺贴所呈现的施工特点
1.2 生产特征
住宅建造涵盖多个专业线条,主要包括土建、装修与安装3大板块。工程参与方由于数量多且相互独立,缺乏协作动力和机制,难以形成一致的价值目标,这导致跨专业间作业耦合程度低,质量问题频发并深度影响关联专业作业的质量、成本、进度,使更为高效的专业工序纵向流水缺乏形成条件。
土建与装修间存在强相关关系,装修作业质量与进度受制于土建移交的基层质量与时间节点(见图2)。土建移交基层质量问题往往影响装修作业流水的形成与持续性,土建作业工期延长与整改也将影响装修作业的计划排程。首先,墙体垂平度、方正度不达标与基层空鼓是土建移交装修阶段的常见问题,通常导致后续装修材料浪费并影响装修观感;其次,对土建质量问题的整改需耗费额外时间及成本。因此,土建基层质量及整改进度问题导致无法批量移交装修,进一步导致流水作业面缺失。
1.3 场景特征
作业场景复杂性是施工生产的主要特征之一,主要体现在高生产难度及高环境动态性。各要素的无序流动削弱了管理体系对生产作业的控制力,限制了作业流水化发展。
在住宅建筑中,墙面瓷砖铺贴的作业场景十分复杂(见图2)。首先,其主要应用于厨卫等空间,用于阻断水汽、油污等因子对墙面的腐蚀,此类型区域一般空间局促、水电气线路复杂。同时,厨卫狭小空间内划分有多个功能分区,这导致作业面被分割为多个不规则作业面,进一步加大了墙砖铺贴作业难度。其次,作业场景承载大量生产要素,且各要素相互独立并自发展开作业,其流动具有随机性和不可控性。以人力要素为例,铺贴作业涉及切、搬、拌、贴等多个工序,这导致在同一作业场景下有多人同时作业,且作业人员往往按主观即时判断随机切换作业面,以此提高个人作业效率。这极大地提高了工序间冲突概率,难以满足流水生产对作业连续性的要求。
2 建筑机器人驱动的组织优化
结合上述施工特点分析,建筑机器人的发展能赋能于串联施工生产中的关键要素,稳定施工生产质量及打通项目管理数字化链接[5],推动施工生产,实现数字化移交、流水化组织、标准化作业与网络化管理(见图3)。
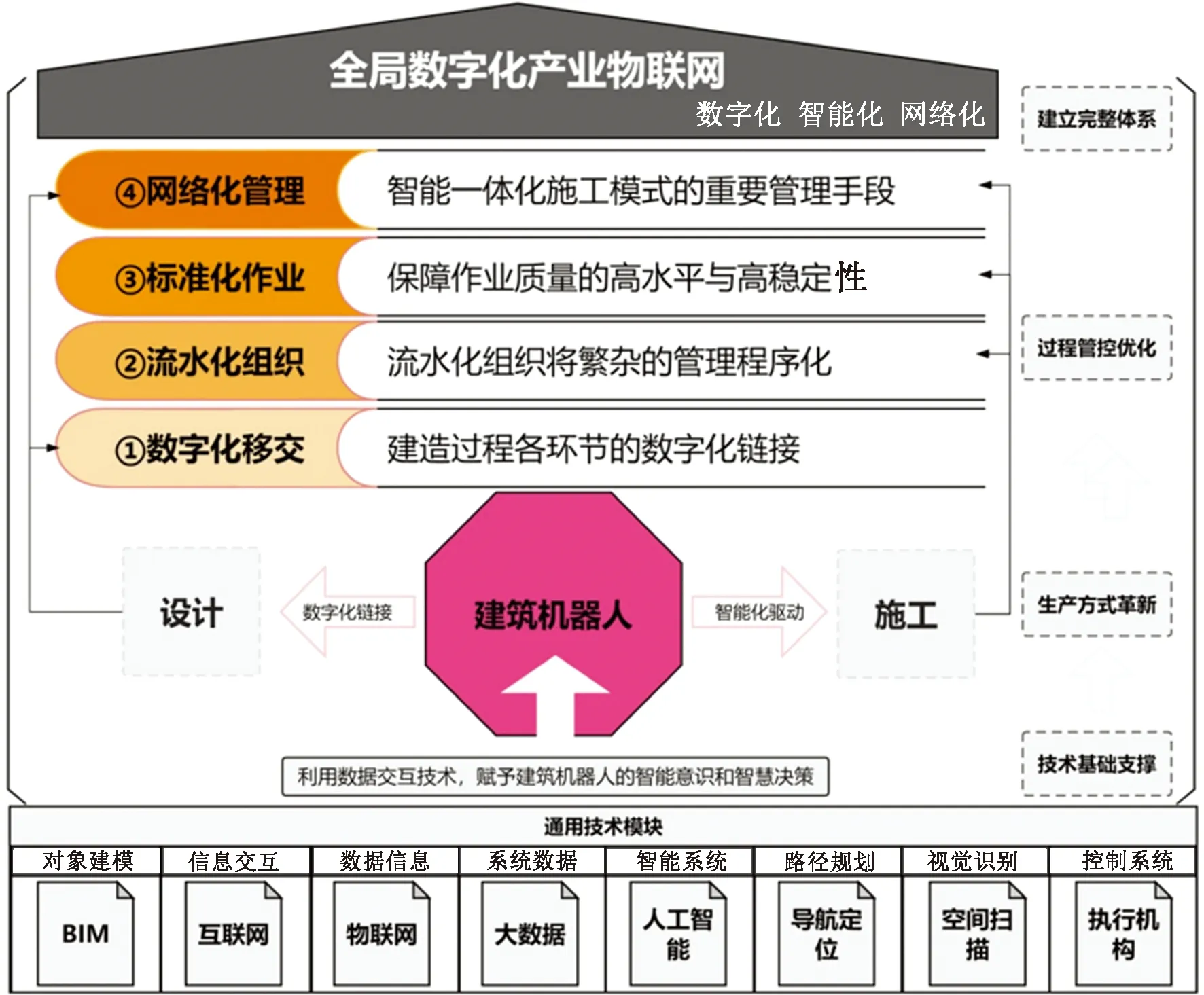
图3 基于建筑机器人发展的全局数字化
2.1 数字化移交
在土建移交装修验收阶段,往往采取人工检测基层质量,但传统人工检测存在弊端,如检测面遗漏率高、数据归集无序等。对此,测量机器人的应用能有效优化上述问题。测量机器人运用AI测量算法处理技术和模拟人工测量规则完成实测实量任务,保障测量范围精准覆盖。同时,其测量数据能实现云端即时上传与储存,并生成数据报表与进度及工效分析。测量机器人集成的建筑空间数据通过系统平台进行数字化处理,并为作业类建筑机器人提供精确的基础信息参数,为机器人自动化作业提供前置准备工作。进一步地,机器人驱动下的数字化移交推动形成建造过程各环节数字化链接,使建造全生命周期数据可追溯,有效保障复杂工程质量水平及工序间作业面移交效率。
2.2 流水化组织
流水施工是指将工程在横向划分为若干个施工段,在纵向划分成若干个施工层[6],按作业特点和施工目标组织有序铺排作业次序。首先,建筑机器人的应用使施工生产效率趋于稳定,管理平台可根据各款建筑机器人作业特点、工艺要求、材料特性等实施多机协同的流水组织,以及机器人端到端数字化链接。同时,项目全生命周期管理信息的数字化与可视化进一步推动科学策划,支持合理制定和修正施工进度计划、物料管理计划、人员需求计划等,形成可落地的智能化流水生产组织方案。流水化组织将繁杂的管理程序化,降低项目管理难度,提高管理精准度,推动管理效率有效提升。
2.3 标准化作业
标准化是通过细化、量化和优化而设计成为标准化的作业程序[7]。操作者按标准化作业程序进行操作,管理人员按其检查操作者对标准的执行情况,从而可最大限度地避免异常情况发生[8]。建筑机器人程序化的任务获取与执行方式为建筑业标准化作业提供了基础,标准化作业成为推动产业升级的重要因素。一方面,建筑机器人标准化作业有效规避传统人工个体因素对作业质量的影响,包括作业经验、身体状态、精神状态等,一定程度上保障作业质量的高水平与高稳定性。另一方面,标准化作业经过一定基数的实践经验后,可通过回收作业执行产生的数据建立模型供管理系统学习和进化,赋予管理系统深度学习功能,不断修正作业标准,增强作业标准对复杂场景、复杂任务的适用性。
2.4 网络化管理
随着智能一体化施工模式的推广应用,工程管理逐渐形成横纵一体化的网络化管理,资源配置效率极大提升。首先,网络化管理通过生产信息的实时共享打破固有组织壁垒,推动形成建设主体、生产主体与劳务主体实现横向一体化,极大地提高横向主体间协作效率与整体管理效率。另外,基于BIM模型及建筑机器人集成空间数据,形成设计、生产、管理各环节的纵向一体化,能及时发现和处理生产过程中的异常情况,保障网络系统高效运行。充分发挥BIM、互联网、区块链、云计算等技术优势,不断推动生产模式和组织方式变革,网络化管理成为智能一体化施工模式的重要管理手段。
3 分工细化与人机合作策略
马克思唯物史观认为,生产关系要与物质生产力的一定发展阶段相适合[9]。建筑机器人作为一种全新劳动力形态,正在深刻改变着建筑业生产组织方式。但与传统制造业不同的是,建筑业施工现场采用产品不动、设备移动的生产方式[10],且施工生产环境往往较复杂多变。基于设计图纸预设作业程序的建筑机器人无法预判作业场景中突发的、无序的变化因素,因此建筑机器人难以实现完全自动作业。这也意味着人与机器人间合作关系存在必要性[11],人机合作将在一定时间范围内成为建筑机器人应用常态。同时,随着建筑机器人应用深化及其所形成的数字化技术推动,也会不断优化人机分工与组织模式。结合不同生产场景和环节,人机合作策略可分为界面分工与人机协作、工序分工与人机协同、决策分工与人机融合等(见图4)。

图4 分工细化与人机合作策略
3.1 界面分工与人机协作
在单个工序作业中,作业面的合理划分与要素组织是效率提升的关键。人机协作是保障效率较优的合作策略,通过合理划分作业界面并充分发挥各自作业优势实现综合效率最优。在此过程中,建筑机器人牵引下的数字技术可实现2个核心功能,推动形成高效的人机协作模式。首先,建筑机器人与BIM模型间的数字化链接推动设计深化,打破设计端与作业端的专业壁垒,全面呈现作业面结构信息,有效保证界面分工精度。其次,建筑机器人主要以数字指令作为作业依据,其作业状态及质量具有较高稳定性,使作业过程更可控,很大程度上避免了传统作业时多要素之间相互干扰。
3.2 工序分工与人机协同
单工序人机协作带来的效率提升,为人机合作在更广范围、更深层次的应用奠定了基础,推动了人机协同的作业模式,形成了更加丰富多元的多工序穿插纵向流水。人机协同以组织优化为核心目标,旨在通过合理的工序任务分配建立人机间协同关系,提升纵向流水组织效率。首先应对传统工序进行拆解与重组,形成基于人机合作的工序序列。其次,在空间与时间双维度下对工序进行分配,保障流水连续性。在空间维度上,通过优化路径规划以避免人机协同过程中发生更复杂的干扰;在时间维度上,通过强化计划排程的合理性与实时动态性,使其既能满足工艺规范要求,又可规避人机作业时间冲突或作业面闲置。
3.3 决策分工与人机融合
机器人本体技术与关联技术和系统的深度联合将进一步推动人机合作关系深化,逐步演进为人机融合的人机合作高阶状态。此状态中,人和机器通过直接接触或间接交互方式,共享、协调、分配、使用物理空间和信息空间的资源与信息[12],并在此基础上实现决策分工,降低生产管理难度。一方面,人机交互的信息交换过程为机器人自主学习提供了大量人工经验与智慧,使建筑机器人获得较强环境感知能力、学习能力,其可参与单任务下的简单决策。另一方面,建筑机器人集成计算机技术、人工智能技术可获得大量可靠数据信息并反馈至管理人员,协助人工对复杂的系统性问题进行分析与决策。
4 工程实践
以广州市ST项目一标段装修工程作为案例,探讨人机合作策略工程实践。该工程总建筑面积为11 964.67m2,主要施工对象为23层住宅建筑。其墙砖铺贴工序共投入11台智能设备,包括6台墙砖铺贴机器人、2台测量机器人、3台打磨机器人,并融合BIM、调度系统等关键技术。
4.1 前置深化与作业划分
为使墙面铺贴工程中的传统人工与建筑机器人可充分发挥各自作业优势,实现人机协作,ST项目首先采用BIM技术进行前置深化,在此基础上结合人机作业特点划分人机作业界面。同时,在三维模型中进行虚拟铺贴作业,明确准确作业量。以02户型公卫南向作业面为例,其铺贴面积约为17m2,瓷砖规格为300mm×600mm,通过铺贴模拟及设计优化,明确该工作面共涉及55块整砖及65块切割砖铺贴,并修正水电预留位、吊柜位置。完成前置深化后,结合作业面复杂程度、人机作业要求等对墙面进行界面划分,综合机器人与人力的最优方式,将作业面中部成片的整砖铺贴面划分为机器人作业面,而将边角位置、水电开孔位置、部件交接位置的零散切割砖铺贴面划分为人工作业面,如图5所示。传统人工作业模式下平均作业效率为15m2/d,需耗时1.13d完成该作业面。而经过合理的人机界面划分,墙砖铺贴的人机协作综合作业效率达到3~4m2/h,5h内即可完成该作业面墙砖铺贴任务。
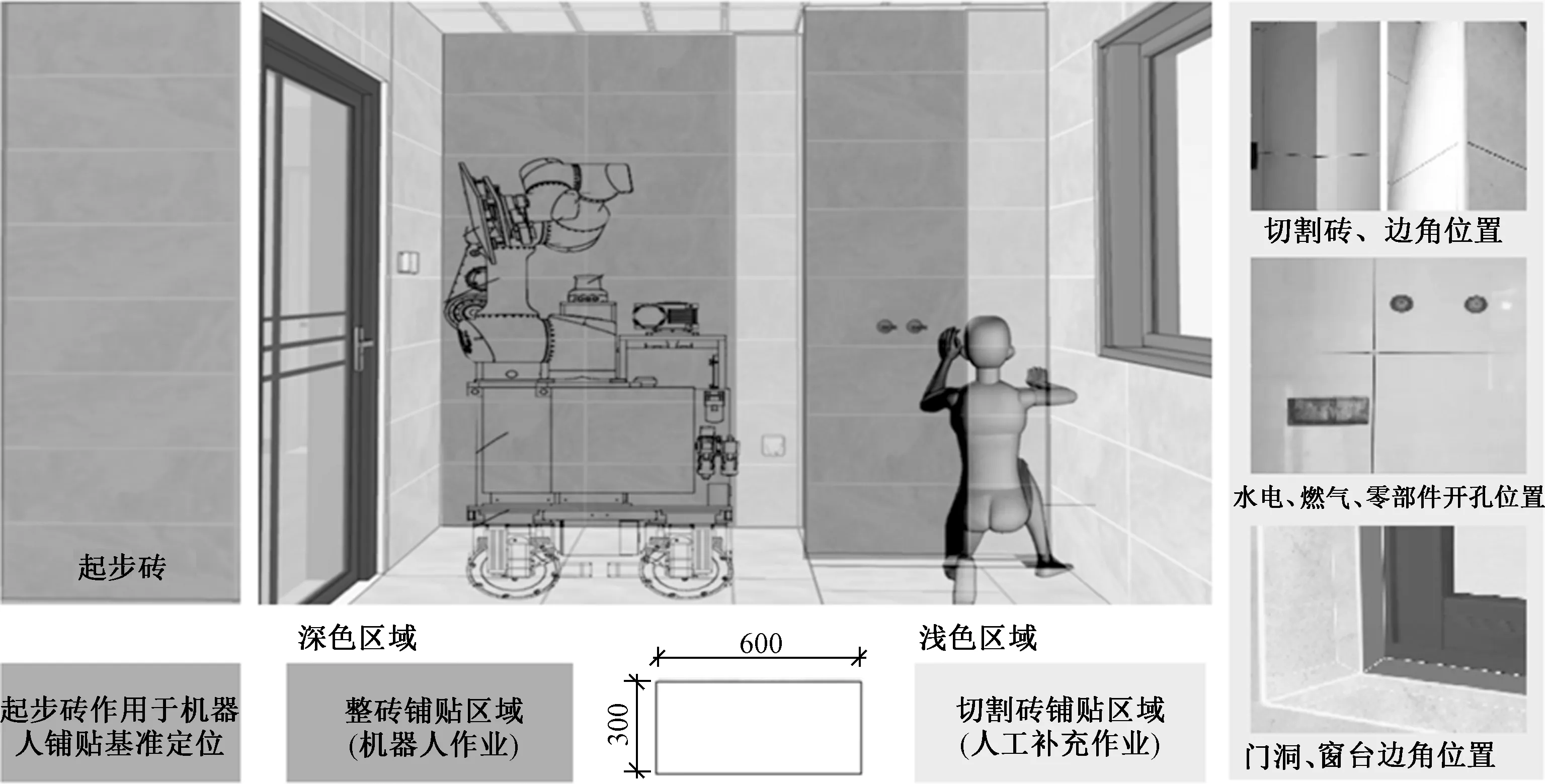
图5 界面划分与人机协作
前置深化将平面设计转化为精准的、具象的作业面,并模拟作业过程、计算具体作业量,明确单工序下人机协作作业目标。合理的作业界面划分使人机能充分发挥自身作业优势,提高墙砖铺贴作业标准化程度,同时降低劳动强度与作业难度,为墙砖、地砖铺贴统一发包与承包形式的拆分和精细化管理提供现实依据。
4.2 组织优化与任务分配
多工序下人机协同面临更复杂的作业环境,对组织优化与人机任务分配提出了更高要求,以保障流水的连续性与效率。ST项目首先在土建移交阶段采用测量机器人采集基层信息,然后生成质量数据并联动打磨机器人对指定位置进行不同深度的打磨作业,使基层质量最大限度地匹配墙砖铺贴质量及观感要求。测量机器人与打磨机器人联动作业形成的数字化移交,突破了土建基层质量对后续装修作业的制约,改变零星移交为每5层一移交。同时,机器人在2h续航作业中按固定工作节拍和预设的铺贴角度、高度、力度进行墙砖铺贴标准化作业。为延伸和放大机器人流水效率,ST项目对人机进行任务分配,将墙砖铺贴工序拆解为前置准备→机器人整铺贴→人工切割砖铺贴的顺次作业任务(见图6)。

图6 工序划分与人机协同
重构后的工序任务对人机协同方案提出了更高要求,需充分保证计划排程的合理性,同时优化人机空间路径规划。ST项目为2梯6户高层建筑,每层分布有3种户型,各户型分配2台墙砖铺贴机器人进行交替作业以对冲机器人充电过程中产生的作业面空置;同时,各户匹配2名工人进行切割砖铺贴,每2名工人交替完成某一户型的切割砖铺贴。而在时间维度上,前置作业中刷涂界面剂后必须确保≥24h的静置风干,待作业面满足铺贴工艺要求后,铺贴机器人方可进场作业。同时,为避免过多的人员流动干扰铺贴机器人激光接收器正常运转,现场严格执行机器退场人工进场的交替进退场模式,墙砖铺贴效率大幅度提升。
以5层厨卫墙砖铺贴作业任务为例,铺贴作业总面积为1 234.7m2,若按传统作业模式,一般组织3人1组,共2组瓦工进行作业,平均单人作业效率为15m2/d,铺贴作业用时13.7d。另外,前置工作中,人工测量平均工期为1d,打磨修整工期根据基层质量水平有所浮动,平均工期为3d,一般总工期为17.8d,而在人机协同模式下,首先采用2台测量机器人和3台打磨机器人进行前置作业,同时划分人机作业界面及作业任务,测算出机器人作业面积为522.5m2,传统人工作业面积为712.2m2,然后制订和执行人机穿插作业方案,共投入6台铺贴机器人及6名瓦工24h交替连续作业,总工期为5d(见图7)。以测量机器人与打磨机器人为核心的数字化移交打通了各工序间数字化链接,且标准化作业使各工序作业质量趋于稳定,削弱上一道工序质量问题对下一道工序的制约。进一步,基于人机协同作业重构工序任务以塑造范围更广、效率更高的流水作业。
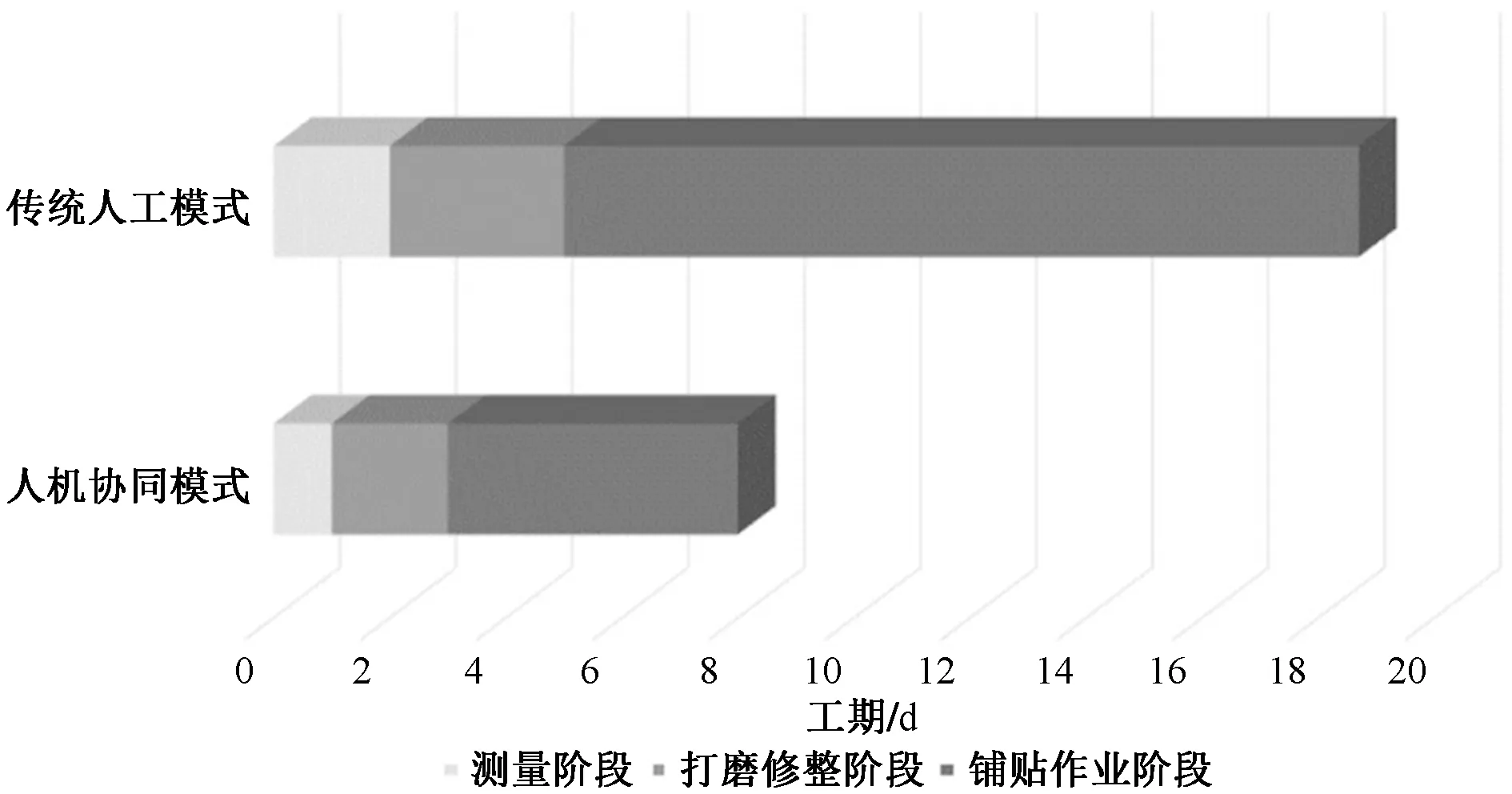
图7 人机协同与传统人工作业效率对比
4.3 管理细化与人机交互
为克服复杂环境、多元管理主体对人机合作流水的干扰,ST项目在施工过程中采用多机调度系统与仓储物流系统对接BIM建模系统,形成融合机器人管理、任务分配与材料管理于一体的管理体系,并实现以机械控键及中控触屏为介质的人机交互。ST项目墙砖铺贴工程首先通过BIM建模系统分析整体作业量,包括铺贴数量及辅料用量,并利用仓储物流系统生成物料采购、入库、调度预案。其次,BIM系统能实时更新和反馈作业需求和设备需求,并动态修正物料需求,最后联动多机调度系统下发工单。在此过程中,管理体系得以准确记录人、材、机等调度及作业数据,使综合效率可预判、可控制、可追溯。同时,当生产现场发生机器人无法自主处理的突发情况,可通过人机交互实现更具灵活性的人工监督与干预,保障了人机融合过程中的最优状态。人机交互本质是信息的链接、处理与反馈,稳定的网络信号是实现人机交互的必要条件。在ST项目生产运行中,由于网络信号不稳定、夜间 10:00 以后限速等情况导致多机调度系统、仓储物流系统、人机交互程序中断,一定程度上扰乱了作业计划与流水实施。
5 结语
建筑机器人技术的进一步成熟,不仅会驱动施工生产组织关系的不断优化,更会不断细化人机分工与合作。本研究通过对墙面瓷砖铺贴工程的组织特征、生产特征与场景特征的梳理,明确了建筑机器人驱动的组织优化内容,以及人机协作、协同与融合等不同层级的合作策略。工程实践表明,单纯的由人或由机器人形成的实施技术路线均存在一定局限性,人机共存将长期存在,人机不同合作策略会随着机器人的技术发展与建造端组织演进呈现出动态变化,而人机友好、交互的良性合作才能形成机器人深度应用和智能建造发展的有力支撑。
