永磁同步电机驱动器电流传感器容错控制
2023-08-02何雅婷罗世超
乔 浩,何雅婷,罗世超
(西安工业大学电子信息工程学院,西安 710000)
0 引言
永磁同步电机以其诸多优点而广泛应用于高性能驱动系统,然而,PMSM驱动系统容易受到工作环境的影响,比如振动和冲击、高温和低温、湿度与灰尘等[1-2]。这些因素都会使得电驱动系统出现故障,甚至严重影响系统的安全性[3-4],其中,在所有电驱动系统中的故障至少有14.1%是由于传感器引起的[5]。
在高性能电驱动系统中,为了提高系统的稳定性,往往需要提高系统的容错能力。永磁同步电机矢量控制系统一般需要安装两个相电流传感器与一个位置传感器[6-7]。针对相电流传感器的故障诊断,GUO等[5]提出了一种基于符号逻辑的电流传感器故障检测方法,结合电机三相电流信号极性变化和转子位置对电流传感器进行故障诊断,并在FPGA上进行了验证,但该方法不能判断出可能出现的增益故障与偏移故障[8]。马雷、ZHANG等[9-10]提出了一种基于坐标变换的方法,其思想是以坐标变换为基础,以经过运算后得到的定子电流残差是否超过所设定的安全阈值作为故障依据,其中安全阈值需要针对特定的工况进行数次调试得到。
当判断出电流传感器故障相后,为了保持系统的正常运行,一般采用对故障相电流进行重构或者切换驱动方式两种策略[6]。林京京等[11-12]提出安装了3个电流传感器来提高系统的容错能力,使用两相静止坐标系中的相电流构造3个判断条件以实现故障诊断,通过基尔霍夫定律在单相电流传感器故障时重构电流,同时设计了一个自适应反推观测器对多相故障时的电流进行估计。应黎明等[13]提出当诊断出电流传感器故障后,将控制方式从矢量控制切换到闭环恒压比控制,从而维持系统的正常运行。ZHANG、林京京等[4,12,14]使用基于电流残差的方式来判断电流传感器是否故障,同时使用另一个SMO来估计使用重组电流的转子位置/速度,得到了较好的实验结果。但使用传统的一阶滑模观测器需要多个滤波器来处理输出信号中存在的抖振现象,这无疑增加了系统的复杂性,工程中通常使用高阶滑模观测器来减少所需滤波器数量[15]。
考虑到电驱动系统的功重比和体积小型化,实际应用中较多采用双电流传感器永磁同步电机驱动系统。本文针对传统故障诊断方法中出现的误检问题,在基于坐标变换的基础上结合时间二次分析法对故障传感器进行二次检测,有效解决了由于瞬时影响和阈值选取不当造成的误检现象。同时基于李雅普诺夫稳定性定理设计了二阶超扭曲滑模观测器在仅有一相电流传感器正常工作的工况下估计其他两相电流,进而完成了单相电流传感器矢量控制。最后,本文在半实物仿真平台上对所提故障容错控制策略进行了验证。
1 电流传感器的故障诊断
在双电流传感器PMSM驱动系统中,假设两个交流电流传感器分别安装在电机的a、b两相上。由图1可知,通过反Clark变换式(2),可以观察到α轴电流只和a轴电流有关,因此可用α轴电流来检测a轴电流。同理,通过反Clark变换式(3),将α′轴与b轴方向重合,可使用α′轴电流来检测b轴电流。
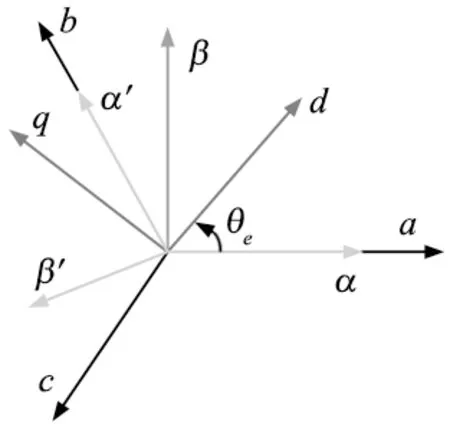
图1 永磁同步电机坐标系
(1)
(2)
相应的,上述两种形式的反Clark对应的Park变换对应为:
(3)
(4)
在图2中,ε为预设阈值,f=1、2、3分别代表第一阶段判断a轴电流传感器故障,b轴电流传感器故障与两相电流传感器均故障。系统在实际运行过程中经常会出现永磁同步电机参数变化、传感器噪声等干扰,直接在实际工程中使用上述基于残差的故障检测方法经常会因为电流残差在短时间内超出所设阈值而造成误检现象,为了避免类似情况的发生,在上述方法的基础上引入了一种基于时间的检测方法。
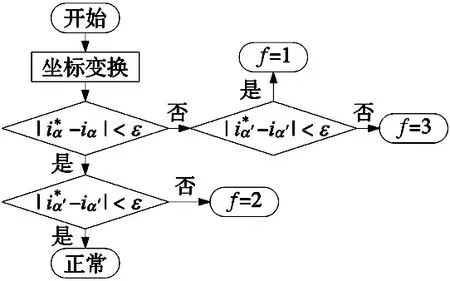
图2 基于电流残差的电流传感器故障诊断流程图
在式(5)中,Tfault为故障检测时间,ts与fs分别为系统的采样时间与灵敏度系数。te为故障持续时间,Flag为故障检测标志位。若故障持续时间大于故障检测时间,即te≥Tfault,则故障检测标志位Flag置1或2或3,即分别代表a相电流传感器故障,b相电流传感器故障,两相电流传感器均故障。其中,灵敏度系数fs直接决定了故障诊断机制是否会出现误检或漏检问题,需要经过多次实验确定具体数值。
(5)
2 电流传感器容错控制方案
2.1 二阶超扭曲滑模观测器
滑模控制因其鲁棒性强和易于实现的特点,广泛应用于中高速范围内永磁同步电机控制。在本文中,以a相电流传感器发生故障的情况为例,使用单b轴电流的滑膜观测器来估计a、c两轴电流。
最基本的超扭曲算法可以表示为如下形式[20]:
(6)
式中:xi(i=1,2)为系统状态变量,k1、k2为滑模增益,ρ1、ρ2为扰动变量。
设计二阶滑模观测器如下:
(7)
式中:x为滑膜控制规律。
观测误差为:
(8)
由式(8)减去定子电流方程可得:
(9)
基于超扭曲算法,滑模控制律设计为:
(10)
(11)
选取定子电流误差作为滑膜面s:

结合上述两式,可得:
(12)
(13)
当系统进入主滑膜面与辅滑模面,此时由等效控制率可得:
(14)
2.2 稳定性证明
为证明此系统的稳定性,假设扰动ρ是有界的,如式(16)所示:
(15)
(16)
式中:δ>0。
选取的李雅普诺夫函数为:
V(x)=ζTPζ
(17)
式中:
(18)
(19)
求V(x)的导数得:
(20)
式中:
(21)
(22)
(23)
考虑到式(16),可得:
(24)

(25)
将δ2=0,增益表达式可简化为:
(26)
得到滑膜面的到达时间为:
(27)
因此,根据Lyapunov稳定性理论可得,所设计的滑模观测器是稳定的。由式(27)可知,系统状态可在有限时间内收敛至原点。
2.3 容错控制方案
在传统矢量控制的基础上以a轴电流传感器故障为例,使用单b轴电流传感器重构故障电流:当a轴电流传感器异常时,故障诊断机制首先迅速诊断出异常电流传感器位置并输出Flag,向电流重构机制发送故障位置。电流重构机制将a轴电流从传感器获取模式切换到使用电流观测器模式,使用基于超扭曲算法的二阶滑模电流观测器来估计a、c轴电流,进而获得dq轴电流,维持系统的稳定运行。所设计容错系统的整体框图如图4所示,因两个电流传感器同时故障时的概率极小,本文不研究在两个相电流传感器均故障的工况下重构电流。
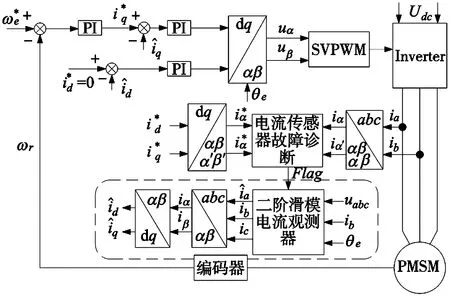
图4 容错系统总体框图
3 实验验证
实验平台由DSP28335和硬件在环实验平台RT-LAB(OP4510)构成,如图5所示,DSP与RT-LAB通过数字和模拟IO口进行数据信号的传输。实验流程为:DSP向RT-LAB发送PWM使虚拟功率电路和电机正常工作,RT-LAB向DSP发送电流和转子位置等信号维持驱动系统的闭环运行。同时被观测的信号从RT-LAB通过网线传输到上位机以供观测。实验中所涉及到的电机参数如表1所示。
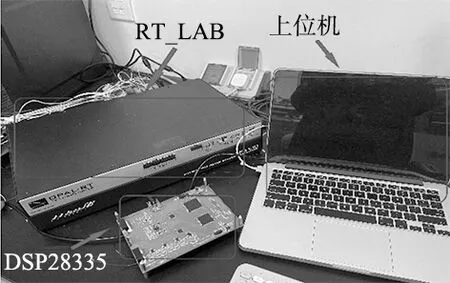
图5 实验平台

表1 PMSM实验参数
实验以a相电流传感器故障的工况为例对故障容错控制策略进行验证,实验设定电机初始转速为800 rad/min,在0.1 s时增加5 N·m负载,当系统运行到0.2 s时采取人工干预的方式使a相电流传感器发生故障,在0.3 s处将电机转速调整为1000 rad/min。实验首先对所提出的复合型故障诊断方式的正确性进行了验证,最后对二阶超扭曲滑模观测器的有效性进行了验证。
在图6和图7中从上至下依次为基于电流残差法的中间参数α、β、α′、β′、α*、β*、α*′、β*′在电机转速800 rad/min同时带载5 N·m时的电流幅值。针对一些由振动、冲击等对电流传感器造成的瞬时影响,会使得电流残差在很短的时间内超出固定阈值,采用一般检测方法很容易出现误检情况,而引入时间检测法后可以很好的消除此类假故障。
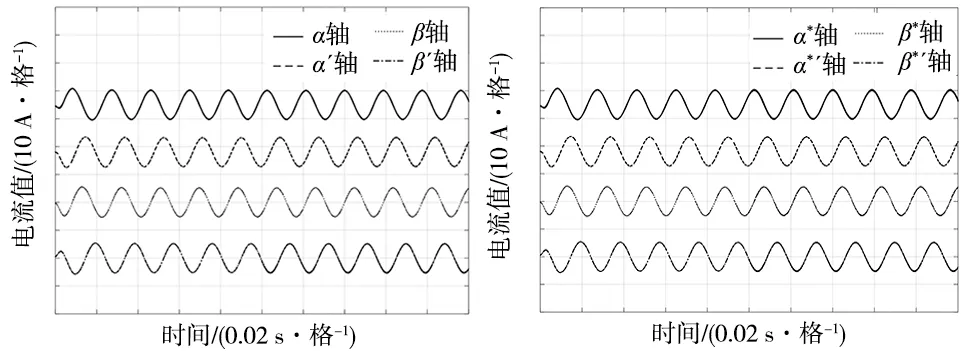
图6 α、α′、β、β′轴电流波形 图7 α*、α*′、β*、β*′轴电流波形
在本次实验的工况下,灵敏度系数fs取值为3,故障检测时间Tfault和故障持续时间te如图8所示,当输出f值时开始产生计时时间te,若故障在短时间内消失,电流残差小于阈值,则te清零。为了避免参数选取不当造成的故障定位时间过长,3个参数的确定要根据实际工况经过多次调试确定。

图8 复合型故障诊断方法参数选取 图9 两种检测方法对比
在图9中,a相电流在0.2 s时刻发生了0.002 s的增益故障,a相电流传感器在短时间内输出结果倍增,采用一般的故障诊断方法由于逻辑判断关系的设定迅速输出故障传感器位置,传感器正常后故障标志位又被消除,明显降低了系统的容错准确率。而所提出的复合型故障诊断方法会对故障信号进行二次判断,有效解决了传感器由于受到瞬时影响造成的误诊问题。
在图10中,a相电流传感器在0.2 s时发生断路故障,a相电流传感器输出变为恒定值零, 复合型故障诊断机制在0.2 s后迅速输出等于Flag=1,耗时3 ms以内,准确定位出故障电流传感器位置。

图10 a轴电流传感器故障检测 图11 a相电流与估计误差
当定位出a轴传感器故障之后,在图11中,a轴电流在0.2 s时刻稍有波动后被重构,使用二阶超扭曲滑模观测器估计的a轴电流曲线光滑、与原a轴电流相比误差较小,峰值误差不超过0.27 A,估计误差保持在4%以内,验证了所设计滑模观测器的有效性。
在图12中,电机转速在0.2 s时刻无明显变化,在0.3 s处工况变化时转速稍有波动,很快回归正常,容错控制系统带载调速性能正常。在0.2 s时刻的转速附近可以观察到,使用基于时间的二次检测法造成的故障传感器定位短时延时没有对电驱动系统造成明显影响。在图13中,使用重构电流运行的系统中电机转速曲线平滑,重构后的电流与原三相电流相比相似度高、误差较小。
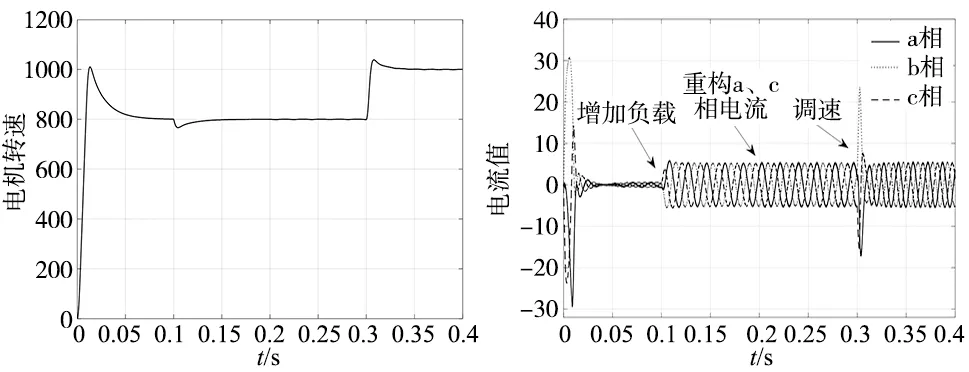
图12 电机转速波形 图13 三相电流波形
综上图中电机各项性能指标可得:当任一相电流传感器出现故障时故障诊断机制可以迅速定位出故障电流传感器位置,同时向电流重构机制发送故障信号,并基于超扭曲算法的二阶滑模电流观测器使用正常相电流重构出其他两相电流,维持电驱动系统的稳定运行。使用重构电流运行的系统电机转速仍稳定在指定转速,在带载工况下正常调速,验证了所提容错控制策略的正确性。
4 结束语
本文针对永磁同步电机驱动系统,提出了一种电流传感器故障诊断与容错控制方案。方案在故障诊断部分采用基于电流残差与基于时间分析法相结合的复合检测方法,克服了传统方法的误检问题。在容错控制部分,基于超扭曲算法的电流滑模观测器具有响应速度快、抖振较小的优点,并使用李雅普诺夫稳定性定理验证了观测器的有效性。实验结果表明,所提出的故障容错控制策略可以快速检测出电流传感器故障相并稳定的重构出故障相电流,在容错控制状态下的驱动系统具有较强的鲁棒性,可以实现可靠的单相电流传感器永磁同步电机磁场定向控制,显著提高了驱动系统中电流传感器的冗余性。但本文研究内容有限,在未来工作中可以针对电流重构误差的产生机理进一步展开研究。
