小行星采样返回任务的选址方法进展与启发
2023-08-02谢欢陈杰童小华晏雄锋王亚琼王一凡曾祥隧冯炯倪鸿基
谢欢, 陈杰, 童小华, 晏雄锋, 王亚琼,王一凡, 曾祥隧, 冯炯, 倪鸿基
(1.同济大学 测绘与地理信息学院, 上海 200092;2.上海市航天测绘遥感与空间探测重点实验室,上海 200092)
小行星是一种微型行星,其直径一般为10m至1 000km之间,包括太阳系在该尺度范围内非彗星的全部小天体。小行星有S、C、X三大类型与部分异常类型,一共有26个亚类型[1]。小行星探测是深空探测任务中新的发展方向,主要有以下几点研究价值:第一,小行星探测对于研究太阳系形成、演化及生命起源具有重要的意义;第二,小行星探测有助于发现小行星中的矿产资源,这些太空资源能够给太空采矿业带来全新的发展动力;第三,小天体探测能够帮助人们更好地应对小行星撞击地球的威胁。
人类早期的小行星探测任务主要是通过飞越、环绕的方式进行探测,主要是利用地面观测设备进行探测。随着科技的持续进步,人类开始通过环绕、附着、采样返回等方式对小行星、彗星等小天体深入探测。1989年10月,美国国家航空航天局发射了伽利略号(Galileo)探测器,并在2年后飞越探测加斯普拉小行星(Gaspra),这是人类首次对小行星进行近距离观测;2012年,我国的嫦娥二号探测器成功实施了对图塔蒂斯小行星(Toutatis)的飞越式探测,加深了人类对小行星的了解[2]。
小行星探测领域的一大重要研究方向就是建立小行星物质与陨石之间的直接联系,以此更好地研究太阳系的演化。为此,2003年,日本宇航局发射了隼鸟号(Hayabusa)探测器前往探测糸川小行星(Itokawa);随后,2014年12月日本宇航局又发射了隼鸟二号(Hayabusa 2)探测器前往探测龙宫小行星(Ryugu);2016年9月,美国国家航空航天局发射了“光谱分析、资源识别与安全、风化层探测器"(又名“奥西里斯号”,OSIRIS-REx)。如今,我国已经公布了小行星采样返回任务的探测规划:计划于2025年发射天问二号探测器并执行2项科学探测目标,即小行星采样返回、彗星会合任务。图1是全球主要的小行星探测任务时间轴。

图1 全球主要的小行星探测任务时间轴Fig.1 Timeline of major asteroid detection missions of the world
月球和火星等大天体探测选址时可以利用轨道器影像在较大范围内确定着陆区域,再通过地形敏感器精准确定着陆点[3]。但小行星探测任务具有探测重复率低、体积小等特点,只能在探测器到达小行星后采取一边探测一边选址的方式,采样选址的基本原则是在满足工程约束条件下提升任务科学目标实现度。
1 目前小天体采样任务选址综述
1.1 隼鸟二号的采样选址方法
隼鸟二号探测任务的整个选址流程大约历经了1.5年。在隼鸟二号还没发射的时候,科学团队已经通过地面观测初步确定了龙宫小行星的大致形状、自转周期、自转轴等信息,为了实现安全采样设计了针对龙宫小行星采样选址的工作流程[4],图2是隼鸟二号采样选址流程图。

图2 隼鸟二号采样选址流程Fig.2 Site selection process of Hayabusa2 sampling
1.1.1 隼鸟二号采样选址的第1阶段
(1)LSS I-a选址阶段。在Box-A阶段创建龙宫小行星的三维形状模型,并且根据对于采样的地形参数方面的基本工程性约束得到小行星表面的安全指数地图,得到了17个初步选址区,每个区域在经纬度网上的尺寸是14°×14°。基本工程性约束有4个因素:亚地距离、坡度、粗糙度和局部太阳角,根据这4个基本工程性约束能够得到小行星表面的安全指数地图,在此基础上创建了遇障概率模型来得到小行星表面的遇障概率地图。
(2)LSS I-b阶段。在Box-C阶段,在小行星表面6km高度处拍摄预选区的光学影像,通过视觉定性评价各个预选区的地形条件,并将候选采样区从17个降至为7个。
(3)LSS I-c阶段。采样区的工程约束条件与科学价值均不可缺少。在Mid-alt阶段,对7个候选采样选址区的科学价值、地形安全度和可采样性进行了分析[5]并通过这3个选址因素的分析结果对候选采样区进行综合评价,计算了最大直径大于3m的岩石分布情况,根据岩石丰度计算结果得到了1个主采样区和2个候选采样区。隼鸟二号对于采样区的热约束是:采样区的温度应低于370K,龙宫小行星几乎所有地表面元都满足该要求[6]。
1.1.2 隼鸟二号采样选址的第2阶段
(1)LSS II-a阶段。采样过程中探测器的太阳能翼展和中央的机械架构需要避开岩石等障碍,需要计算岩石的立体尺寸,在3个候选采样区中得到各个面元的最大安全采样半径,得到了6个直径是20m的安全采样区,将L08-B作为最佳的采样子区域。
(2)LSS II-b阶段。该阶段的采样工作高度依赖于TM球的辅助导航。在TD1-R1-A和TD1-R3阶段,发现在TM球的附近区域有2个存在安全裕量的区域:L08-B和L08-E1,但是由于L08-B区域的纬度高于L08-E1区域,探测器在飞抵该地区需要更长的机动操作,理想的采样区域为L08-E1区域。
(3)LSS II-c阶段。科学团队绘制了分辨率是每像素14cm的数字高程模型,在此验证了L08-E1地区的地形平坦性好、安全性高,符合安全采样的需求。如今隼鸟二号样品仓已经返回地球,其携带的样本对于人类研究小行星和太阳系的演化具有重要意义。
1.2 奥西里斯号的采样选址方法
奥西里斯号采样返回任务的主要科学探测目标是从贝努小行星中采样返回原始的碳质矿物,安全地从小行星表面采集超过60g的物质[7]。奥西里斯号的采样选址也可以分成2个阶段,第1阶段从贝努小行星全球中选择4个候选采样区,第2阶段选出主采样区和一个候选采样区,并对主采样区的地形和光谱特征进行详细调查。图3是奥西里斯号采样选址流程[8]。

图3 奥西里斯号采样选址流程Fig.3 Site selection process of OSIRIS-REx sampling
1.2.1 奥西里斯号采样选址的第1阶段
在奥西里斯号的接近段,科学团队对贝努小行星的自转参数、形状模型、光谱特征进行了初步估计;在轨道A阶段,科学团队发现了贝努小行星存在岩石颗粒的喷发现象;在详细调查阶段,科学团队通过地表障碍和基本地形条件指标,初步确定了贝努小行星的12个候选采样区;2019年6月进入轨道B阶段,在约距离贝努小行星表面高约680m的位置进行观测,该阶段主要分析了选址四大因素:地形安全性、可交付性、可采样性和科学价值。通过对以上4个因素的综合评估,科学团队一共选择了4个候选采样区:夜莺(Nightingale),位于北纬56°的一个陨石坑;翠鸟(Kingfisher),位于北纬11°的一个陨石坑;鱼鹰(Osprey),位于北纬11°的一个陨石坑;鹬(Sandpiper),位于南纬47°的一个陨石坑[9]。
1.2.2 奥西里斯号采样选址的第2阶段
侦察A阶段包括从1 000m到1 250m的高度的4次对双曲线飞越,依次对4个采样区进行了最终的观测,主要目标是选择出主采样区,并为航天器制导建立NFT(natural feature tracking)特征。选址委员会通过使用该阶段数据产品对4个候选地点进行最终排名,选择夜莺区域作为主要样本地点,夜莺区域提供了收集足够可采样物质的最高可能性,碳质矿物含量较高,具有最高的科学价值。
侦察B阶段主要是为了获取主采样和备份采样区的光谱特征,并转为NFT导航到预设的主采样区,还有一个关键探测目标是在岩石计数的基础上详细描述主采样区可采样性物质的精准分布。
在侦察C阶段,探测器影像的空间分辨率提升到1cm,能够获取高精度成像、岩石计数以及可采样物质和危险障碍分布地图,该步骤得到的结果是对主采样区的最终观测结果[10]。
2020年10 月奥西里斯号完成了对贝努小行星的采样操作,并且采集了预计为900g的贝努小行星样本。
1.3 其他小行星采样选址方法
(1)美国舒梅克号(NEAR Shoemaker)任务。美国舒梅克号于1996年2月发射,并于2001年2月在爱神星(Eros)上的Himeros depression区域着陆,是人类首个环绕小行星且成功着陆的探测器。基于光学图像和激光测距数据进行了小行星三维形状建模,并估计了其质量、体积、密度和自转参数。着陆点的选取主要是基于探测器轨道位置和探测器的可达性。在着陆选址中,科学团队发现爱神星表面总体地势较为平坦,最终选择的着陆区是直径为9km的地形平坦的洼地区域[11]。
(2)欧洲航天局罗塞萨号(Rosatta)任务。欧洲航天局的罗塞萨号于2004年3月发射,2014年8月抵达67P/Churyumov-Gerasimenko彗星。科学团队在小行星上发现了一个面积为1km2的椭圆形平坦区域,并把该区域作为初步着陆区域。接着在此区域内基于地形坡度、岩石分布和光照因素,综合考虑选择了“J区”着陆区域,该区域所在区域的坡度基本小于30°,并且岩石数量较少,区域内85%的区域能够给探测器在着陆后提供日均超过6.2h的光照时间,能够确保探测器在着陆后继续依靠太阳能进行充电[12]。
(3)日本隼鸟一号(Hayabusa)任务。日本隼鸟一号于2003年5月发射,2005年11月在静海(Muses sea)区域开始第一次样本采集,这是人类首次执行的小行星采样返回任务。2005年9月抵达糸川小行星,通过对糸川小行星的形状建模,初步确定糸川小行星的大致形状。隼鸟一号的采样选址工作是基于光学图像和激光雷达获得的小行星表面地形特征,由于糸川小行星表面80%的区域是粗糙的地形,因此将小行星表面最大平坦区即静海区域作为采样重点调查区域,科学团队在该区域内选择了坡度小于8°、直径为60m的平坦区域作为采样区,该区域存在较多的风化层。对返回的样本进行分析,一共采集了大约1 500粒的微小颗粒[13]。
2 小天体采样选址方法分析
2.1 小天体采样选址的基本方法
采样选址规划是小行星采样探测的前置工作,合理科学的采样选址方案能够降低采样安全风险,找到更容易采集样本、科学研究价值更高的采样区域。小行星采样选址主要从工程约束和科学价值两方面考虑,对于微重力,自转速率很大的小行星还需要考虑表面物质的附着性。
小行星采样选址的工程约束中的地形安全因素是研究者最为关切的因素。2007年,美国宇航局在提出的面向行星精确着陆的障碍检测与规避技术(ALHAT)发展方案中也强调了其重要性[14]。对于地外天体,常见地形障碍检测包含:激光雷达和光学影像检测方法。激光检测障碍的方法是通过激光雷达获取地形的三维点云信息,并从中识别出潜在障碍。该方法精度高、受周边环境影响小、对不同类型障碍适应性好,在嫦娥等着陆任务中得到了成功应用。光学影像检测障碍的方法是根据岩石等障碍在影像中的形态等典型特征,反演其分布和尺寸,主要方法包括:①基于阴影信息。通过岩石等障碍区往往存在阴影来检测岩石等障碍位置。②基于模板匹配。通过先验的障碍信息来检测障碍的分布。③基于立体视觉。通过立体视觉结合阴影信息来检测障碍的分布。④基于深度学习。通过深度网络训练样本检测障碍的分布。⑤基于二维影像和三维地形数据。这些数据作为输入样本,通过深度网络检测障碍的分布。⑥基于图像反照率。通过岩石等障碍在不同观测角度下的反照率变化信息检测障碍的分布。我国小行星探测任务将要探测近地小行星2016HO3,其直径约为40~100m[15]。
工程约束中需要考虑到导航的可交付性。需要结合探测器的导航误差来估计小行星表面各个面元的遇障概率。隼鸟二号和奥西里斯号都通过结合导航误差的蒙特卡洛仿真模拟探测器的采样落点,由此进一步验证采样区的安全性。
科学价值则是希望小行星采样返回的样本能够包括丰富的含水和碳质矿物,可以通过光谱识别技术来确定矿物的分布[16]。此外,采集更多的小行星样本物质也是小行星采样返回任务的重要科学目标,在中远观测距离下无法获得小行星表面高精度影像时,可以通过分析岩石和土质的热惯量的差异,获取易于采样的星表可采样物质分布[17];可以根据星表可采样物质的光谱变红特征来得到被探测小行星表面存在可采样物质的分布[18];可以根据幂律规律来计算光学图像无法直接测量的小颗粒的数量与密度[19];可以分析光学影像的反照率差异判断可采样物质的分布。
对于探测目标是体积很小、自转速率很大的小行星,还需要考虑到小行星表面动力学条件对采样选址的影响,我国计划探测的2016HO3小行星自转速率很大、重力场微弱,采样物质容易从星体表面逃逸。对小行星表面动力学条件的建模可以估计质点在小行星表面的运动[20];根据小行星采样选址所考虑的因素和基本方法总结出如图4所示的小行星采样选址方案。
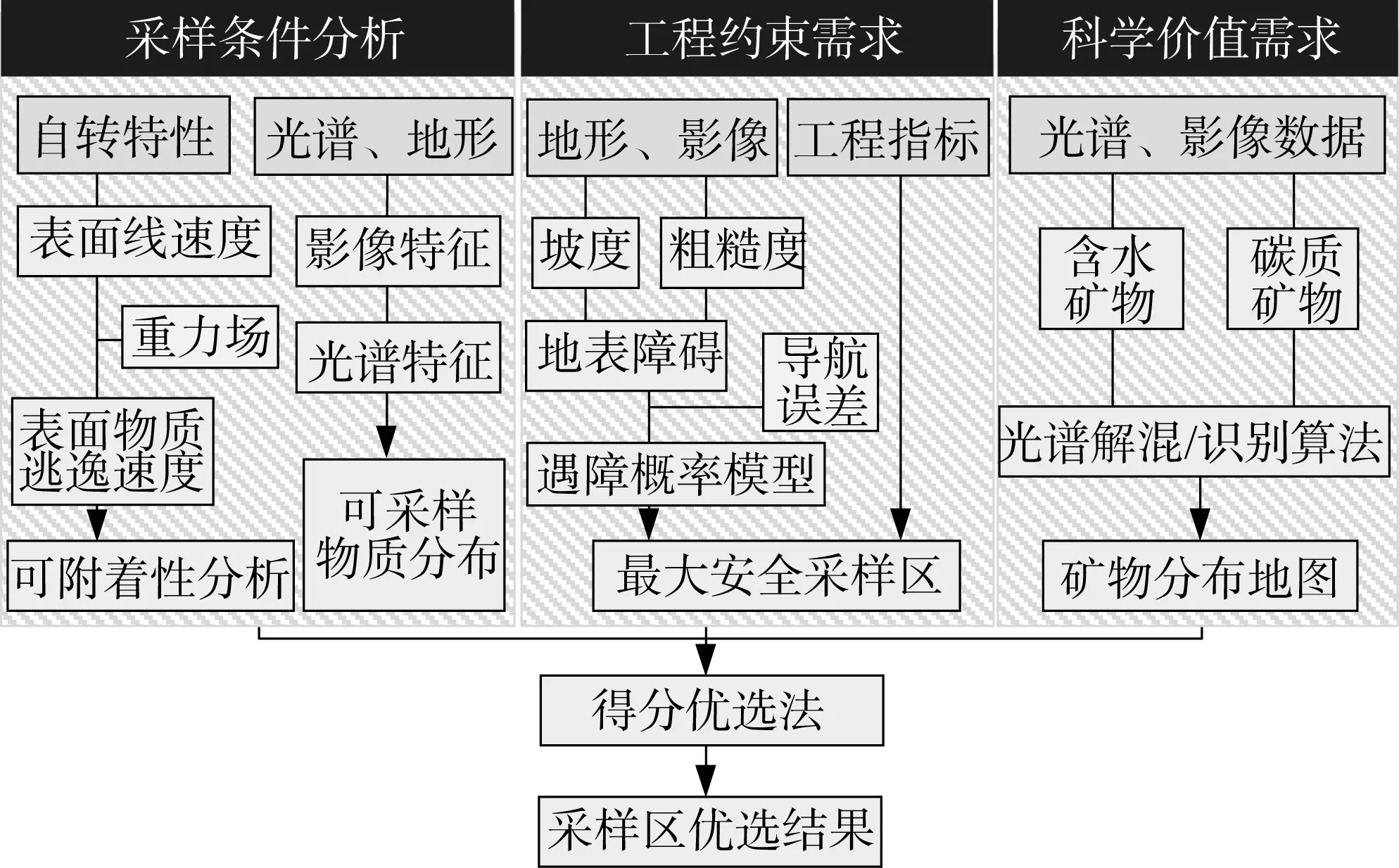
图4 小行星采样选址方案Fig.4 Site selection program of asteroid sampling
为了可以在目标区域内寻找出合适的着陆区域,常见的搜索算法包括形态学算法、螺旋式搜索算法、模糊推理算法以及嫦娥三号所运用粗避障和精避障相结合的方法在轨实现了安全区的自动搜索[21]。在小行星采样返回任务中通常会先搜索多个候选点,随后通过观测数据补充进行反复论证,结合涉及选址的各个因素的综合考量确定主要采样点。
2.2 隼鸟二号和奥西里斯号的选址对比分析
小行星采样返回任务均会考虑工程约束和科学价值这两方面的因素进行采样选址工作。表1介绍了隼鸟一号、隼鸟二号和奥西里斯号的采样返回任务的基本情况对比,并提及了我国预计2025年发射的“天问二号”小行星探测任务基本情况。

表1 小行星采样返回任务基本概述Tab.1 Basic overview of asteroid sample return missions
对比日本的隼鸟二号和美国的奥西里斯号的选址方法,比较两者所用的载荷、选址涉及的流程、方法以及最后的选址结果。
(1)所用载荷对比分析。为了获取龙宫小行星采样返回任务所需要的小行星科学观测数据,隼鸟二号搭载了相机组ONC-T对小行星表面进行测绘,获得小行星的反照率与光谱斜率,相机ONC-W1和ONC-W2都是获取导航地形数据,红外相机TIR调查龙宫小行星表面的热物理特征;搭载的激光雷达LIDAR对龙宫小行星进行地形测绘,并用于辅助导航;搭载的近红外光谱仪NIRS探测龙宫小行星含水矿物等矿物分布;搭载的雷达测量小行星的质量等物理参数[22]。而奥西里斯号的相机组一共搭载了3台相机调查贝努小行星的形貌特性,长焦相机PolyCam是一种长距离相机,用于从2亿~200万km的距离拍摄小行星;地形相机MapCam用于拍摄小行星表面的高分辨率地图;采样相机SamCam记录了TAGSAM采样系统的操作和样本采集的过程。搭载的激光雷达OLA对小行星进行导航与全球测绘作业;搭载的可见光和近红外光谱仪OVIRS探测贝努小行星的物质分布;搭载的热红外光谱仪OTES探测小行星的矿物分布和热物理情况;搭载的X射线仪得到贝努小行星的全球X射线地图。
(2)选址流程对比分析。隼鸟二号在采样的第1阶段首先考虑的因素依次有:隼鸟二号在第1个选址阶段考虑的因素是亚地距离、局部太阳角、坡度和粗糙度,通过以上4个基本工程约束条件,科学团队初选了边长为100m的17个候选采样区,接着又通过目视评价地形安全条件,将选址区缩小到7个,之后又通过对7个候选区的岩石丰度、可采样物质分布和科学价值的综合评分选出了1个主采样区和2个候选采样区。美国的奥西里斯号在采样的第1阶段所考虑的因素依次有:①地形安全性。指的是采样区必须要满足不包含危害探测器采样安全的地形条件的要求,希望预选采样区的安全区域的分布比重高于99%。此外采样点还有着热物理层面的工程约束,采样点的温度低于400K。②可交付性。指的是基于航天器的设计要求交付到距离表面选定点25m以内大于98%的概率。③可采样性。指的是奥西里斯号能采集多少小行星样本物质的能力,对应于贝努小行星表面可采样物质的分布。④ 科学价值。指的是希望返回的样本最好是包含丰富的含水和碳质矿物。根据以上4个条件筛选出了贝努小行星的4个候选采样区。由此可以发现,地形安全性是小行星采样选址的首要条件,奥西里斯号将导航的可交付性纳入到了第1个阶段的选址范畴,而且并没有考虑到亚地距离等约束条件。与之对应的是,隼鸟二号在采样选址的第1个阶段中并没有考虑到导航可交付性,而是放在了最后对主采样区的导航可交付性进行验证,并且隼鸟二号在地形安全条件上考虑的因素更加复杂。
在隼鸟二号采样选址的第2个阶段,科学团队从采样的安全性角度来选择最后的采样落点。这个阶段的安全性主要涉及地形安全度和导航误差,科学团队先是从3个候选采样区中选择了6个边长是20m的子采样区,然后从中选择了地形安全度最好的L08-B1区,同时计算TM球附近的安全采样边界,隼鸟二号团队在TM球附近发现一个纬度更低的安全区域L08-E1。而奥西里斯号在采样选址的第2个阶段则是通过高分辨率的影像分析了4个候选区可采样物质的分布情况和矿物分布,并以此选择了夜莺选址区作为主采样区。由此可以发现,隼鸟二号在采样选址的第2个阶段将结合导航误差的避障评估放在了首要位置,而奥西里斯号除了关注安全区的精细选址以外,还重点测绘了夜莺选址区直径小于2cm的物质分布情况。
(3)选址方法对比分析。隼鸟二号采样选址的第1个阶段考虑了亚地距离、坡度、粗糙度和局部太阳角,为了有效分析地形特征,科学团队通过SFM(structure-from-motion)和SPC(stereophotoclinometry)得到小行星的三维模型。亚地距离是计算小行星表面面元距离地球和小行星质心连线的距离;坡度是计算小行星表面面元的法向量和径向向量的夹角;粗糙度是计算小行星表面面元在论域内的高程最大差值;局部太阳角是计算表面面元的法向量和行星太阳向量的夹角,接着通过加权结合叠置分析的方法来评估龙宫小行星的安全区域。然后,采取了视觉定性评估的方法评估地表的安全性,将评估的结果分成好、中、坏3个档次。随后在分析小行星表面可采样物质分布的时候,科学团队通过热成像和光学图像对小行星表面的可采样物质进行分析;而该阶段对地形安全度的评估则主要指标是岩石分布以及地表粗糙度。岩石分布的计算方法是人工识别每像素50cm分辨率的图像中长轴大于3m的岩石。在对候选采样区的科学价值分析中,通过光谱特征估计龙宫小行星表面的含水矿物和碳质矿物的分布。在隼鸟二号采样选址的第2个阶段,通过取其水平半长轴和半短轴的平均值来估计岩石的高度,通过障碍阴影法和立体视觉的方法来判断岩石的尺寸。通过蒙特卡洛仿真预测采样落点,结果表明预测的采样落点均位于安全区。
相比较隼鸟二号,奥西里斯号最初设计的采样策略就是在直径50m的安全采样区内采集更多直径小于2cm的颗粒。在采样选址的第1阶段,科学团队通过SPC的方法与激光三维建模的方法生成了小行星的三维模型。奥西里斯号对于地形的要求是坡度小于14°,提取影像中直径大于21cm的岩石障碍,根据影像的显著性特征和纹理表征,使用神经网络结合人工校正的方法完善障碍分布,得到了小行星全球的初步安全采样区。科学团队利用可采样物质存在的光谱变红和相位变红的特性从大范围地图上获得可采样物质的大致分布,还可以通过对表面物质热惯量分析的方法来初步探测可采样物质的分布。利用光谱特征估计贝努小行星表面的含水矿物和碳质矿物的分布。通过蒙特卡洛仿真估计奥西里斯号抵达贝努小行星全球的能力,得到贝努小行星全球的可交付性情况。在奥西里号采样选址的第2阶段,科学团队重点调查了4个候选采样区的岩石分布情况,通过面向公众参与的小行星障碍提取项目人工提取直径大于2cm的岩石障碍,还通过候选区光谱吸收带特征分析矿物的分布,最终选择了夜莺作为主采样区。
(4)选址结果对比分析。隼鸟二号的主采样区是L08,在主采样区L08中又选择了L08-E1作为采样点,中心坐标是经度206.5°、纬度4.2°,直径是5.6m,该地区的地形平坦度好,岩石障碍少,距离TM球距离近。奥西里斯号的主采样区是夜莺,位于一个直径为20m的陨石坑中,其中心坐标是经度43°、纬度56°,直径是6m,夜莺处于边缘光滑的陨石坑中,包含了较多的可采样物质。隼鸟二号团队更加重视地形条件以及导航操作的便利性来选择主采样区。而奥西里斯号团队除了关注地形条件,也关注可采样物质的分布情况。图5分别展示了龙宫和贝努小行星在远距离和近距离拍摄条件下的实际采样区影像图。
图6是隼鸟二号及奥西里斯号选址关键因素及选址方法。除此以外,隼鸟二号和奥西里斯号都绘制了小行星的重力和温度分布地图作为采样选址的参考约束项。

图6 隼鸟二号及奥西里斯号选址流程对比Fig.6 Comparison of site selection process of Hayabusa2 and OSIRIS-REx
3 对我国小天体采样选址任务的启示
我国的小行星探测任务已经提上日程,计划于2025年发射,结合之前的小行星采样选址任务的实施情况,我国在小行星采样选址过程中应当关注以下几大要素。
(1)体积小、自转速率大的小行星安全区选址方法研究。地面数据观测结果表明,2016HO3小行星的直径小于100m,自转周期仅仅约0.5h,该小行星的表面很可能安全采样区更为狭小,为此需要精确安全区的选取方法以及精准的着陆导航。在该小行星微重力的环境下,在采样段需要向探测器提供向下压力来保证着陆阶段的姿态稳定性。并且为了保证样本能够顺利收集到样本舱中,如果采用破岩或者气体激励的方式搜集表面样本,还需要考虑到微重力环境下表面物质的动力学条件,判断采集过程中样本是否会逃逸。
(2)多因素选址条件下的最优选址方案。小行星采样选址规划需要考虑工程方面的坡度、粗糙度、太阳角、障碍分布等因素,需要考虑科学方面的碳质矿物、含水矿物和原始物质的分布等因素。并且,为了采集到更多的小行星样本,需要尽可能选择星壤丰度高的区域。因此,需要设计在保证工程安全条件下尽可能采集更多高价值小行星物质样本的选址方法,这对于小行星采样返回任务来说十分关键。
(3)复杂星表条件下的采样方式研究。目前对小行星“2016HO3”的采样方式共准备了触碰、悬停、附着等多种方式。对于触碰的采样方式,其选址方案可以与隼鸟二号和奥西里斯号的采样选址方案类似,而对于悬停和附着的采样方式,则需要额外考虑采样选址区的可附着性,特别对于附着的采样方式,需要考虑到着陆装置和星壤的力学关系来保证探测器能够稳定在星表之上,以及考虑附着区的光照情况保证探测器能够维持正常的供能水平,保障采样工作顺利实施。
4 结语
介绍了日本隼鸟二号和美国奥西里斯号的采样选址流程、方法与结果,并进行了对比分析。科学的采样选址方法是保证小行星采样返回任务成功的重要因素,尽管日本和美国的小行星科学选址团队已经建立了系统性选址方法,但尚未实现通过悬停和着陆采样的方式来实现小行星的采样返回任务,也尚未对直径小于100m的小行星进行采样返回,因此,针对今后的小行星采样选址工作,要耦合科学任务目标和工程实际来设计最优方案,开发鲁棒性更好的采样选址系统性方法来契合不同小行星采样返回任务的实际需求。
作者贡献声明:
谢 欢:论文总体指导、初稿撰写。
陈 杰:论文撰写、论文修改。
童小华:论文总体思路指导。
晏雄锋:论文指导,部分论文内容的撰写。
王亚琼:研究思路讨论。
王一凡:研究思路讨论。
曾祥隧:研究思路讨论。
冯 炯:研究思路讨论。
倪鸿基:研究思路讨论。