基于自然驾驶数据的分心状态特征分析与跟驰行为建模
2023-08-02朱奕昕张铎王俊骅孙剑
朱奕昕, 张铎, 王俊骅, 孙剑
(同济大学 道路与交通工程教育部重点实验室,上海 201804)
个人移动终端、车载信息和服务系统给驾驶员的出行和交互带来了便利,但同时也造成驾驶员在开车时的注意力分散。驾驶员分心成为驾驶过程中最常见的现象之一[1]。据统计,在英国和西班牙的道路上,分别有多达15%和20%的驾驶员处于分心状态[2-3],直接影响到交通流的正常运行[4]。纵向跟驰和横向换道是2类最基本的驾驶行为,其中,相比于横向换道这种需要驾驶员充分关注的驾驶任务,纵向跟驰过程中车辆行驶自由度大,任务本身不需要持续的完美行为和全神贯注,因此分心行为大多发生在纵向跟驰过程[5-6]。跟驰过程中的分心会使交通流产生迟滞和震荡等不稳定现象[7],从而影响交通流运行安全和效率。因此,研究跟驰过程中的分心驾驶行为,对其进行合理有效的分类与建模,对于准确描述道路交通流特征、深入剖析交通流运行规律等具有非常重要的意义。
分心研究在近年来受到越来越多的重视。从研究方法上讲,驾驶分心试验法依旧是最主要的一种,包括驾驶模拟器试验[8-9]和实车试验[10]。然而,驾驶分心试验本质上是受控型任务试验,驾驶人自身驾驶行为的保真度低,驾驶人与车、路、环境之间的交互弱,无法准确地提供驾驶人在自然状态下的分心行为。而自然驾驶试验具备真实驾驶情况还原度高、场景覆盖丰富等特点[1],可为分析驾驶行为提供强大的数据支持。但鲜有研究将自然驾驶状态下非受控驾驶数据用于分心行为的分类与建模。从研究目标上讲,现有研究多聚焦于分心行为识别和干预,通过车辆指标[9]和驾驶人视觉指标[11],使用统计学或机器学习等[8]方法对驾驶人分心状态进行判定,但较少考虑分心跟驰行为建模问题。最近有学者意识到了将分心现象引入传统交通流模型中的必要性,并在模型结构和方法框架上进行了一些尝试。例如Saifuzzaman等[12]使用TCI(Task-Capacity Interface)理论将分心状态整合到常用的跟驰模型(IDM、Gipps)当中,但是改进的跟驰模型针对的是整体分心行为,并未探究分心跟驰行为在不同的行为表现特征下的建模;Van Lint等[13]提出了一个多级驾驶行为框架并据此对分心行为建立了专有的跟驰模型,但是改进后的模型结构复杂,参数众多难以应用到实践当中。更重要的是,这些模型没有经过真实驾驶人数据集的验证,有效性和可靠性难以保证。因此,如何基于非受控的自然驾驶数据,对驾驶分心进行真实准确的描述和建模这一问题上,现有研究仍存在空白。
此外,分心行为作为一种在驾驶过程中随机产生的状态,具有致因不确定性和表现不确定性的双重不确定性特点[14]。这对于分心行为建模而言是一个重要挑战。首先,分心行为的致因不确定性使得从自然驾驶数据中获取具有典型特征的分心样本非常困难。另外,驾驶人在分心行为上的表现可能在人类多个内在行为参数上有所体现。例如,有的驾驶人分心导致更高的反应时间[12],而有的驾驶人可能对环境做出错误的感知和判断,导致更激烈或者更保守的操作,更有驾驶员会表现出多种行为特征的组合,如在错误的感知下产生延迟的反应等。因此,必须从人因的角度对分心驾驶进行合理的识别和分类,继而才能较科学地对不同类别分心行为进行建模。
针对以上问题和挑战,基于持续开展3年多(行程超20万km)的上海自然驾驶实验数据进行研究,首先提取分心驾驶事件,并对分心跟驰行为进行分类;进一步对现有4类跟驰模型和改进模型的分心行为建模精度进行适应性评估,最后得出分心状态下跟驰行为建模的最佳方案。
1 研究方法
1.1 研究框架
为了探究自然驾驶状态下的分心特征与跟驰行为建模,提出研究框架,如图1所示。在分心跟驰样本准备中,首先从大量的自然驾驶数据中提取出了所需的分心跟驰样本。在分心跟驰分类中,构建了一个对于分心跟驰样本的最优分类流程。在分心跟驰建模中,首先通过对比4个经典模型选出最优模型,并将其与2种经典的模型改进方案进行对比,选出最优模型,从而完成分心状态下的跟驰行为建模。
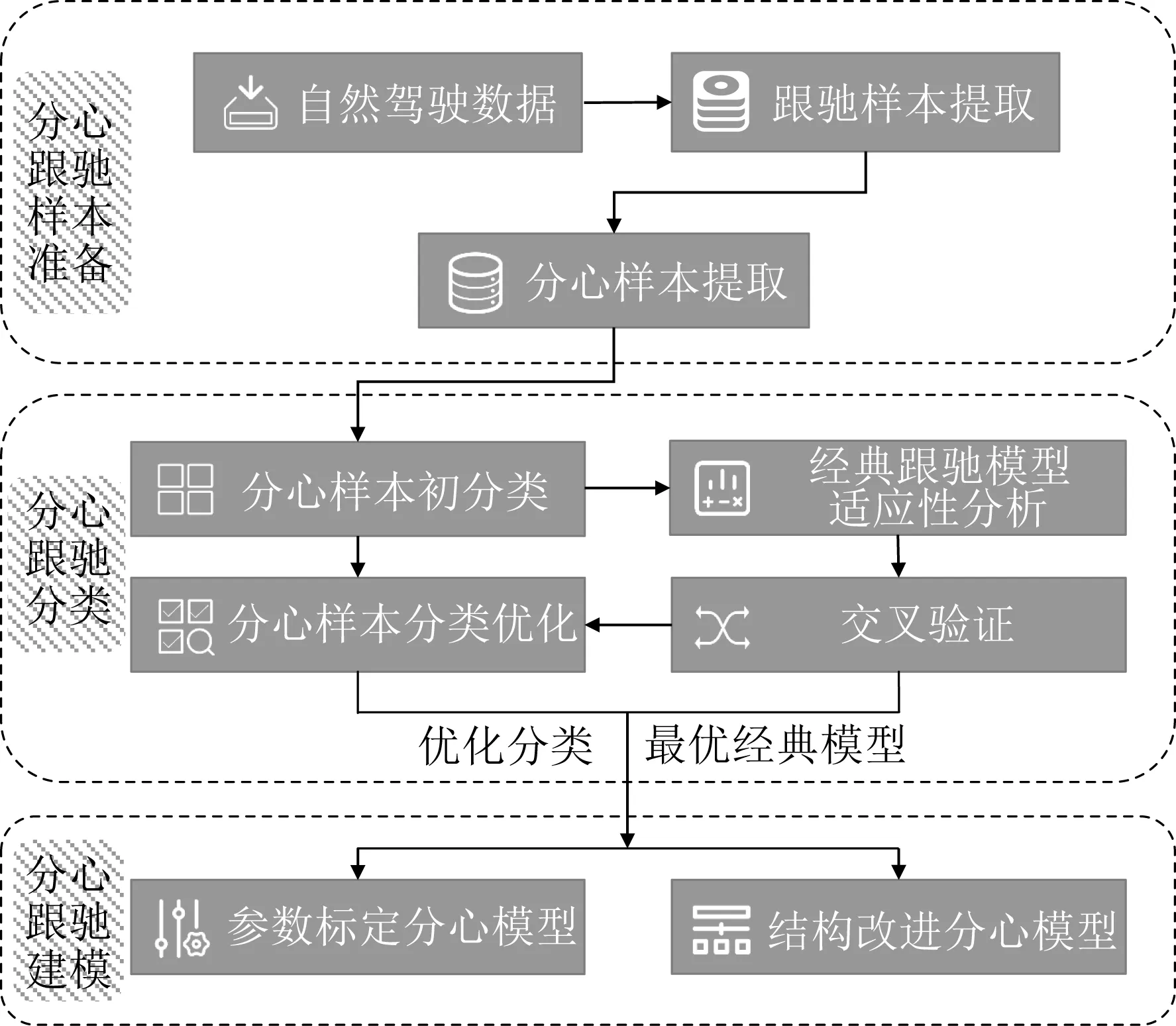
图1 研究框架Fig.1 Research Framework
1.2 基于自然驾驶数据的分心样本提取
使用的数据来源于通用、腾讯和华为等联合采集的自然驾驶数据[5]。数据采集系统由雷达、三轴加速度计、GPS和4台同步摄像机组成,采集到的数据包括GPS定位信息,车辆控制器区域网络(CAN)数据、纵向和横向加速度、雷达探测到的周围车辆速度及距离、4个摄像头采集到的视频(包括驾驶人面部视频、手部操作视频、车辆前方视频以及车辆后部视频)。数据中所包含的信息如图2所示,其中Δx1、Δx2、Δx3、Δx4、Δx5代表目标车辆与其他车辆的纵向距离,Δy1、Δy2、Δy3、Δy4、Δy5代表目标车辆与其他车辆的横向距离,d1表示车辆中心距车道中心线距离,d2、d3分别表示车辆中心距右侧和左侧车道标线距离,d4代表车辆距离最内侧车道距离。

图2 自然驾驶数据及信息采集Fig.2 Collection of naturalistic driving data and information
共有50名司机参与了这项研究,样本的性别、年龄和驾驶经验的分布与中国普通驾驶人群的分布基本一致,包括长达3年的自然驾驶行为、完整的轨迹和驾驶员个人特征。与其他研究中使用的仿真轨迹数据相比,自然驾驶数据提供了海量非受控环境下的多维数据集,对于研究自然驾驶状态下的中国驾驶员的驾驶行为特征极具代表性。自然驾驶数据对于周围车的识别和判断采用毫米波雷达进行探测,毫米波雷达具有同时检测多个目标且精度高的优点,尤其相对于传统基于视频识别的数据集。但是,不可避免地,由于驾驶环境的复杂多变,自然驾驶数据中依旧会存在少量缺失、噪声干扰等问题。首先,在视频核查跟驰片段时,同时验证了数据记录和视频记录的匹配程度(是否存在车辆漂移、车辆动作如远离、加速等记录错误等)。然后,利用3-sigma原则剔除异常值,然后用线性插值法对缺失值进行填补,以保证所有跟驰片段的采样率均为10Hz。根据Punzo[15]的关于跟驰数据质量的研究可知,本文处理过的数据精度已经达到了不影响跟驰行为分析及正常跟驰模型标定的级别。
重点研究分心状态下驾驶人的跟驰行为建模。首先提取稳定跟驰片段的标准,参考了Ervin等[16]和Higgs等[17]以及孙剑等[1]的研究。关于分心样本的提取,孙剑等[1]结合分心状态下车辆控制的宏观表现,提出了3种典型的分心场景:
(1)在无特殊情况下,前后车相对距离越来越大。即前车持续3s以上不减速,后车车间距增大,而后车的速度无明显增加。
(2)后车刹车不及时导致与前车间距离过小。即前车减速时间超过2.5s,后车的期望反应时间(desired reaction time, DRT)减小至危险阈值以下,而后车的速度并未明显减小。
(3)车辆横向摆动不稳定。即横向加速度或方向盘转向率出现超出阈值范围的极值。
但仅通过这3种场景分辨出的分心样本可能存在误判,这是由于数据异常或者不同驾驶员的个性驾驶行为导致的,因此需要通过人工视频核验来获得真正的分心跟驰样本。分心样本的提取流程以及具体标准如图3所示。
1.3 分心跟驰分类
由于分心跟驰的驾驶行为具有较强的不确定性,无法简单地通过车辆外在参数进行类别划分,本文提出了一个对分心跟驰样本进行最优分类的分类流程。首先,基于驾驶员刺激-反应框架,通过人工视频核查对分心样本进行初步分类;然后分析经典跟驰模型在初步分类的分心样本上的适应性;最后,通过模型参数交叉验证分析模型的适应性,同时,利用验证结果对分心样本类别进行合并优化,最终得到分心样本的最优分类结果。
1.3.1 基于驾驶员刺激-反应框架的分心样本初分类
长期以来,驾驶人驾驶行为过程都被解析为一个典型的输入输出的控制过程。道路上以及车辆内的各种交通信息都可以视为对驾驶员驾驶行为的刺激,驾驶员在感知到刺激后,经过接收分析,产生了能够观察到的驾驶行为反应。该刺激-反应的过程已经通过驾驶员脑电波试验得到了证明。在驾驶员分心时,脑电波在信息读取(即刺激输入)和反应2个阶段均会产生异常[18]。在交通流模型方面,Van lint等[13]通过试验证明,以驾驶员敏感度和反应时间为指征的驾驶员驾驶行为框架可以较好地解释驾驶员分心状态下的不同行为场景。由此,引入驾驶人刺激-反应框架用以对分心驾驶过程中的异常行为表现进行解释和判别,该任务可以表示为
式中:t为当前时刻;i为目标车辆的编号;ai(t)为加速度;τi(t)为反应时间;Si(t)为驾驶员感受到的刺激;θi(t)为驾驶员对刺激的反应,即敏感度;ωi(t)为驾驶环境特征。驾驶员所观察到的前后车之间的距离、速度差等即为感知到的刺激,驾驶员从感知外界刺激到做出驾驶操作所需时间即为反应时间,驾驶员对外界刺激的感知能力即为敏感度。分心行为在驾驶过程中属于随机事件。分心事件的随机性是指发生时间的随机性和分心表现的随机性,而分心表现的随机性与分心表现的不确定性是相关联的。本文重点关注解决分心表现不确定性的建模。根据Van Lint等[13]的研究,分心会带来的影响包括驾驶员对速度和距离的感知、反应时间以及驾驶员对期望速度和车头时距的适应性调整这3个方面。为了探索如何对分心的表现不确定性建模这个问题,根据Van Lint等[13]的研究,考虑了驾驶员的感知能力、反应时间以及适应能力等维度来试图探索对分心表现的合理划分和建模。将驾驶员的分心特征考虑为,在刺激和驾驶环境特征没有发生明显变化的情况下驾驶人反应时间和敏感度2个行为参数的变化,这种变化可能是单个参数的变化,也有可能是2个行为参数的共同变化。由此初步得出5类可能的分心行为类别:①麻木反应。驾驶员对刺激的感知能力变弱,反应较弱,即敏感度较低。②延迟反应。驾驶员对于刺激做出反应的时间变长,即驾驶员反应时间较大。③过激反应。与麻木反应相反,驾驶员对刺激的感知能力过分敏感,反应较强,即敏感度较高。④麻木-延迟反应。驾驶员对于刺激做出反应的时间变长,且反应较弱,即敏感度较低,且反应时间长。⑤过激-延迟反应。驾驶员对于刺激做出反应的时间变长,反应较强,即敏感度较高,且反应时间长。
由于用于分类的2个行为参数(反应时间和敏感度)是驾驶人内在参数,且在驾驶过程中存在时变,难以在短暂的分心样本中被准确计算或标定。而与此同时,这种行为参数的变化又很容易被人类观察者所捕捉和感知,因此,使用人工视频判定分类的方法。
为了保证人工视频判定分类的准确性,召集了9位驾龄在5年以上的志愿者,设计了多人双循环验证流程,即志愿者每3人一组,每个分心跟驰片段首先由一人进行分类判断,然后交由第二人再次进行分类判断,当两者对某个视频分类不同时,交由第三者进行最终的评判,每组志愿者判断相同的分心跟驰片段,当其中2组的判断结果不同时,再交由第3组进行分类判断。
1.3.2 经典跟驰模型适应性分析
考虑到仿真应用中分心行为建模的实际需求,以现有跟驰模型为基础,探索分心建模改进方向,同时为分心行为的分类提供进一步指导。在过去的几十年中,许多跟驰模型基于不同交互逻辑被开发出来,然而这些模型虽然在描述正常跟驰行为上被证明是高度可靠的[5],但是对于分心跟驰行为,其适应性至今仍未经过真实数据的检验。因此,为填补这一空白,利用上述初分类的5类分心样本来验证不同经典跟驰模型在这些样本上的表现。
选取具有代表性的4个跟驰模型即GHR模型、Gipps模型、IDM模型和Wiedemann模型进行研究。对于模型的适应性分析,将4类跟驰模型在初步划分的5类分心样本上进行了模型标定,为了保证结果的可比性,对每类数据进行了数据量对齐。标定方法选择的是最常用的遗传算法[19],并且选择了跟驰间距的均方根标准化误差(RMSNE)作为标定误差,最后根据模型标定误差对模型在分心样本上的适应性进行对比。
(1)GHR模型。GHR模型是跟驰模型中最经典、研究最多的一个跟驰模型,是典型的刺激-反应类模型,它的主要思想是后车驾驶员根据前车速度以及两车之间的间距决定后车的加速度,试图调节本车速度与前车一致[20],如式(1)所示:
式中:an(t)为后车n在t时刻的加速度;Vn(t)为后车在t时刻的速度;ΔVn(t-τn)为在(t-τn)时刻前后两车之间的速度差;ΔXn(t-τn)为在(t-τn)时刻前后两车之间的间距;τn为反应时间;α、β、γ为灵敏系数。
(2)Gipps模型。Kometani等[21]提出了一种与刺激-反应模型不同的跟驰模型,认为驾驶员在跟驰过程中努力尝试与前车保持最小的安全距离,这就是安全距离类模型。目前最常用的安全距离模型是Gipps模型[22],在此模型中,驾驶员不是对前后两车之间的速度差做出反应,而是对与前一辆车的间距做出反应,并且一直试图与前一辆车保持最小的安全距离。
(3) IDM模型。期望度量模型中使用最广泛的是智能驾驶员(IDM)模型,与Helly模型不同的是,IDM模型将驾驶员的期望速度和期望车头时距同时考虑了进来,驾驶员在跟驰过程中会尝试减小实际情况与其期望水平之间的差异[23]。
式中:an,max为后车的最大加速度或减速度;an,comf为后车的舒适减速度;β为自由加速度指数,通常取值为4;(t)为期望速度;Sn(t)为两车之间的间距(从前车尾部到后车前部的距离);(t)为期望的间距,这里的期望间距取决于后车速度、前后车速度差、最大加速度或减速度、舒适减速度、期望车头时距以及期望静止间距,可以用式(4)计算得到:
式中:Sn,jam为后车的静止期望间距;(t)为后车的期望车头时距。
(4)Wiedemann模型。前文所提的跟驰模型都是驾驶员根据前车的物理信息做出反应,并没有研究驾驶员在跟驰过程中的心理反应,因此心理-物理跟驰模型被提出来描述驾驶员在不同交通状态下的行为[24]。Wiedemann模型就是典型的心理-物理模型,也叫感知阈值模型。在此模型中,驾驶状态被划分为4个区域:①自由流状态,②逐渐接近前方车辆,③跟驰前方车辆,④紧急制动,如图4所示。图中AX代表静止车辆之间的期望距离,BX代表最小期望跟驰距离,SDV和CLDV表示接近前车的边界,SDX表示最大跟驰距离边界,OPDV代表速度差的边界。
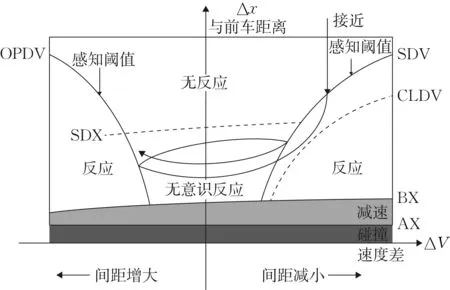
图4 Wiedemann模型示意Fig.4 Schematic diagram of Wiedemann model
1.3.3 基于模型适应性交叉验证的分类优化
在一方面,现有分类类别数相对较多,明显增加了实践当中潜在数据采集成本和标定成本;在另一方面,现有分类基于人工视频判定,其合理性有待进一步验证。因此,探索对5类分心跟驰行为类别进行进一步优化的可能性。
跟驰模型标定之后的交叉验证经常用于检验不同类别驾驶行为的组间异质性[25],由此可以同样验证1.3.1中分类模型的合理性。当2类分心跟驰样本存在较大的组间差异时,一组样本的跟驰行为参数将无法较好地适用于另一组样本。基于此,将标定得到的参数集进行交叉验证,如图5所示,探讨分心样本初步分类结果是否有进一步优化的可能。

图5 交叉验证示意Fig.5 Schematic diagram of cross-validation
1.4 分心跟驰建模
目前对于分心跟驰行为的建模主要包括2种方法:参数标定方法、结构改进方法。选取在跟驰模型改进相关研究中参数增加和结构化改进的2个代表性的模型,分析现有的改进跟驰模型在不同类别分心跟驰行为上的适应性。
(1)参数标定法。参数标定法是指只通过对现有的跟驰模型进行分心跟驰状态下的参数标定,得到一组适用于分心跟驰状态下的行为参数,此组参数即可区别于正常跟驰行为,对分心跟驰行为进行较精确的描述。标定方法的选择以及参数设置与1.3.2节相同,经过标定得到的跟驰参数即分心状态下跟驰模型的取值。参数标定方法的优点是无需对模型进行结构性修改,仅对现有的跟驰模型参数进行修正即可,简单易操作,便于在交通流仿真模型中进行再现。
(2)结构改进法。Zhang等[5]考虑到不同驾驶风格和交通流设施带来的显著行为差异,提出可以在IDM模型中添加一项附加项εadd来校正IDM模型的输出结果,并且考虑了跟驰行为中的异质因素,使其更加贴合现实交通流(AIDM模型)。该模型并未修改IDM模型的核心结构,而是为模型添加特定分布噪声项,在固定参数的标准IDM模型的基础上,通过附加项的分布生成不同情况的校正值,从而提升IDM模型在异质性跟驰行为上的描述能力。AIDM模型的结构如式(5)所示:
式中:εadd为附加项,用来校正IDM模型的输出结果。
另一个较为典型的模型为Saifuzzaman等[12]根据TCI(Task capacity Interface)理论对IDM模型进行增强后提出利用任务难度框架对IDM模型进行修改,得到TDIDM模型。但是该模型未经过多类别的真实分心轨迹数据的验证。TDIDM模型表达式如式(6)—(8)。利用自然驾驶数据对AIDM和TDIDM模型进行模型适应性分析。
式中:Dn(t)为驾驶员n在时间t感受到的任务难度;Sn为前后两辆车之间的距离;Vn为跟驰车辆的速度;为期望车头时距;δn为风险参数;τ′n为修正的反应时间;τ′n为用于捕捉驾驶员对任务难度级别的灵敏度的系数;修正的反应时间为τ′n=τn+φn,其中φn为驾驶员增加的反应时间;γ为灵敏系数。
2 结果分析
通过1.2节方法获得了251个分心跟驰片段,占总跟驰片段的4%。为了便于对比分析,随机提取了相同长度的正常跟驰片段。
2.1 分心跟驰样本分类结果
2.1.1 分心样本初分类结果
针对1.3.1中所述的5类分心跟驰行为,组织志愿者根据经验观察前后两车的加速度变化状况进行初步分类:①麻木反应。前车加速度波动较大,但后车加速度波动极小。②延迟反应。后车加速度随前车加速度的波动而改变,但反应时间较长。③过激反应。前车加速度波动不大,但后车加速度有明显的改变。④麻木-延迟反应。前车加速度有所波动,后车加速度波动较小且反应时间较长。⑤过激-延迟反应。前车加速度波动较小,后车加速度波动较明显且反应时间较长。
经过人工视频判定的方式初步区分出5类分心跟驰样本。其中麻木反应片段为35个,共548s;延迟反应片段为143个,共3 877s;过激反应片段为11个,共201s;麻木-延迟反应片段为33个,共562s;过激-延迟反应片段为29个,共690s。图6展示了不同分心类型下跟驰轨迹。
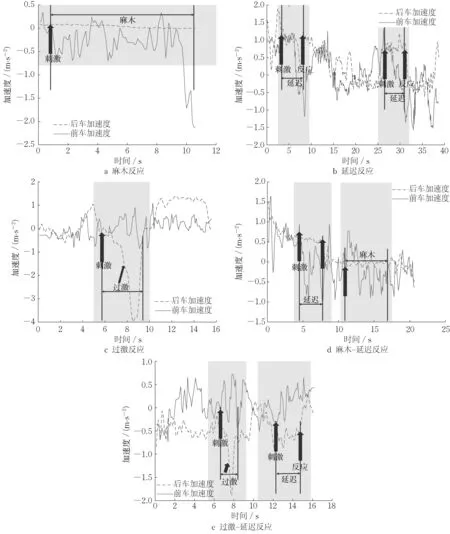
图6 5种分心跟驰行为Fig.6 Five kinds of distracted CF behaviors
2.1.2 分类结果适应性分析
首先,对比各模型在描述正常跟驰和分心跟驰状态下的适应性情况。通过图7可见,IDM模型无论在正常跟驰还是分心跟驰行为上相比于其他模型有更强的适应性。相比于正常跟驰,不同的模型在分心跟驰的样本上均显示出了较差的适应性。然后,将正常跟驰样本与分心跟驰样本混合后进行标定,结果显示混合样本的标定误差仍然是IDM模型最小,并且4个跟驰模型在混合样本中的表现均无法达到在正常跟驰样本中的水平(误差均大于10%)。最后,将混合样本的标定参数代入分心跟驰样本中进行验证,可知IDM模型的验证误差仍然保持最小,但所有模型的验证误差均高于正常跟驰样本(误差均大于12%)。

图7 跟驰模型适应性对比Fig.7 Adaptabilities of investigated CF models
由此可以说明,IDM模型对任何状态下的跟驰行为的适应性均为最优;同时,由于分心跟驰与正常跟驰行为存在较明显的差异,需要对分心状态下的跟驰行为进行单独的分析研究;另外,由于分心跟驰行为存在着不同的行为特征,简单将所有分心样本视为整体进行标定的方法可能无法准确描述分心跟驰行为。
将分心跟驰样本初步分为了5类后,对跟驰样本分别进行标定,标定误差如图8所示。
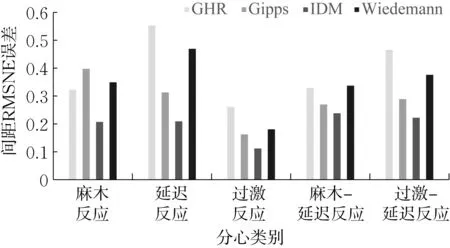
图8 跟驰模型不同分心类别下适应性对比Fig.8 Adaptabilities of investigated CF models on each kind of distracted CF
首先,在所有分心类别中,IDM模型的标定误差依旧最小,这说明在描述分类后的分心跟驰行为时,IDM模型仍然表现最佳。已有研究表明IDM在描述正常跟驰上有明显优势,本文则第一次对其在不同类别的分心行为上的描述能力进行检验。
然后,进一步分析IDM模型在不同分心类别中的适应性。如图9所示,分类后的标定误差明显小于未分类的标定误差(减少了13%以上),即在将分心跟驰样本进行分类后,IDM模型对分心跟驰行为的描述能力有了显著提高,这也再次证明了将分心跟驰行为进行分类的合理性。同时可知,IDM模型对不同类型分心行为的建模精度能够达到对正常跟驰行为的建模精度,甚至优于正常跟驰行为。

图9 IDM模型在不同跟驰行为上适应性对比Fig.9 Adaptabilities of IDM on different kinds of CF behaviors
2.1.3 基于交叉验证的分心类别优化结果
在得到5类分心跟驰样本在IDM模型上的行为参数后,对5组参数进行交叉验证,从而寻找进一步优化分类结果的方案。图10展示了IDM模型参数在不同类别上的交叉验证结果。
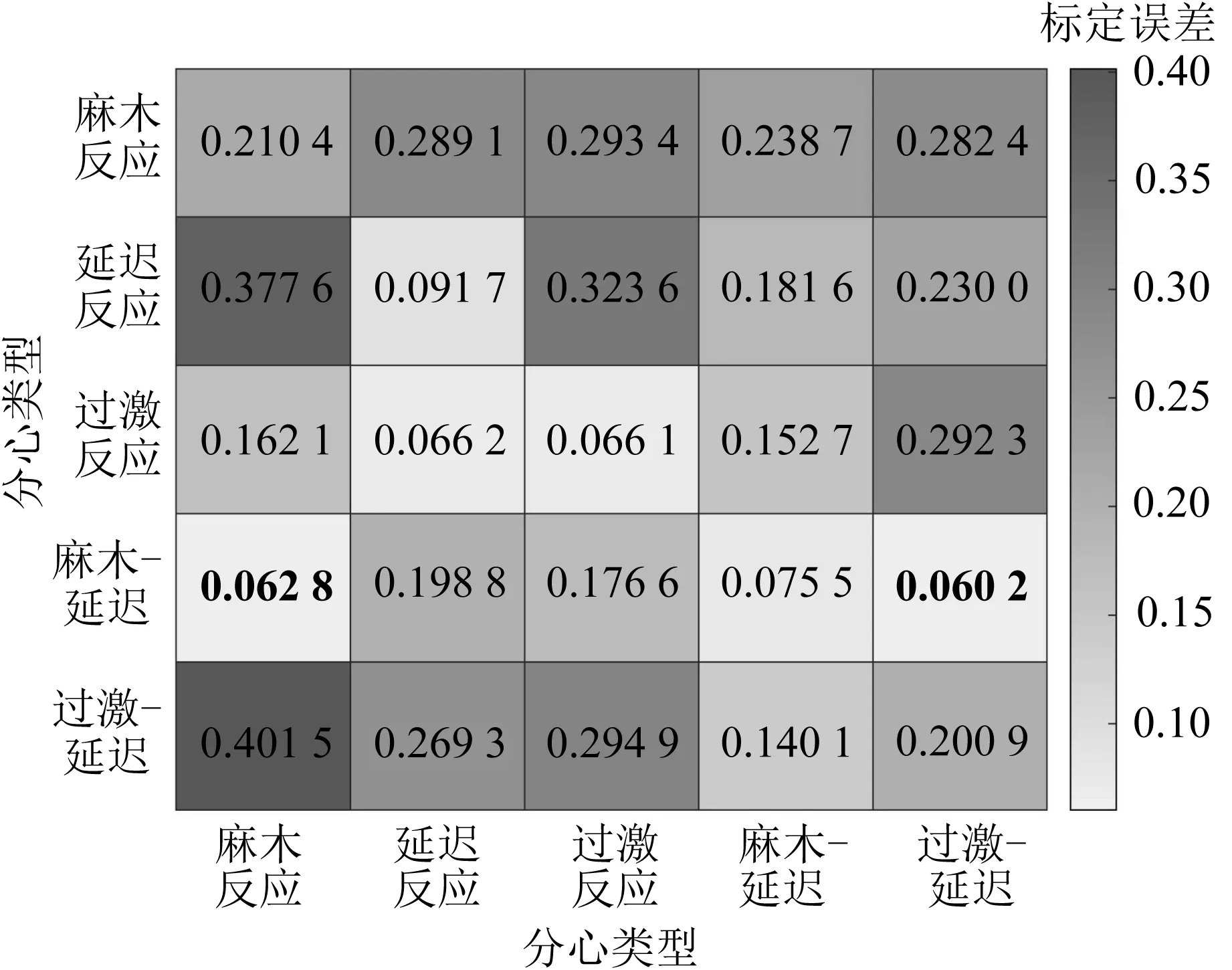
图10 IDM模型交叉验证结果Fig.10 Cross-validation results of IDM
交叉验证结果表明,延迟反应与其他类别的分心跟驰行为差异较大,因此延迟反应归为单独的一类。部分类别的IDM模型在其他类别中同样表现较好,例如麻木反应的IDM模型在麻木-延迟反应中表现也很好,可能的原因是麻木-延迟反应的主要跟驰行为特征与麻木反应相似。而过激反应样本量过少,且其IDM模型与过激-延迟反应的IDM模型差异并不十分显著。综合考虑参数交叉验证的结果以及不同类别分心跟驰行为的定义,考虑将后2类分心跟驰归入前3类中:将麻木-延迟反应归入麻木反应,将过激-延迟反应归入过激反应中。至此,跟驰行为合并为3类:麻木反应、延迟反应和过激反应。
为了验证合并后的分类是否还能保持分类后的优势,针对3类分心跟驰行为再次进行同样的IDM模型标定,图11显示,将分心跟驰样本分为3类后,利用IDM模型标定得到的误差仍然小于分类前;分类之后的IDM模型标定误差与正常跟驰样本上的误差(0.21)仍无明显差距。基于此,确定了将分心状态下的跟驰行为划分为3类的方案。
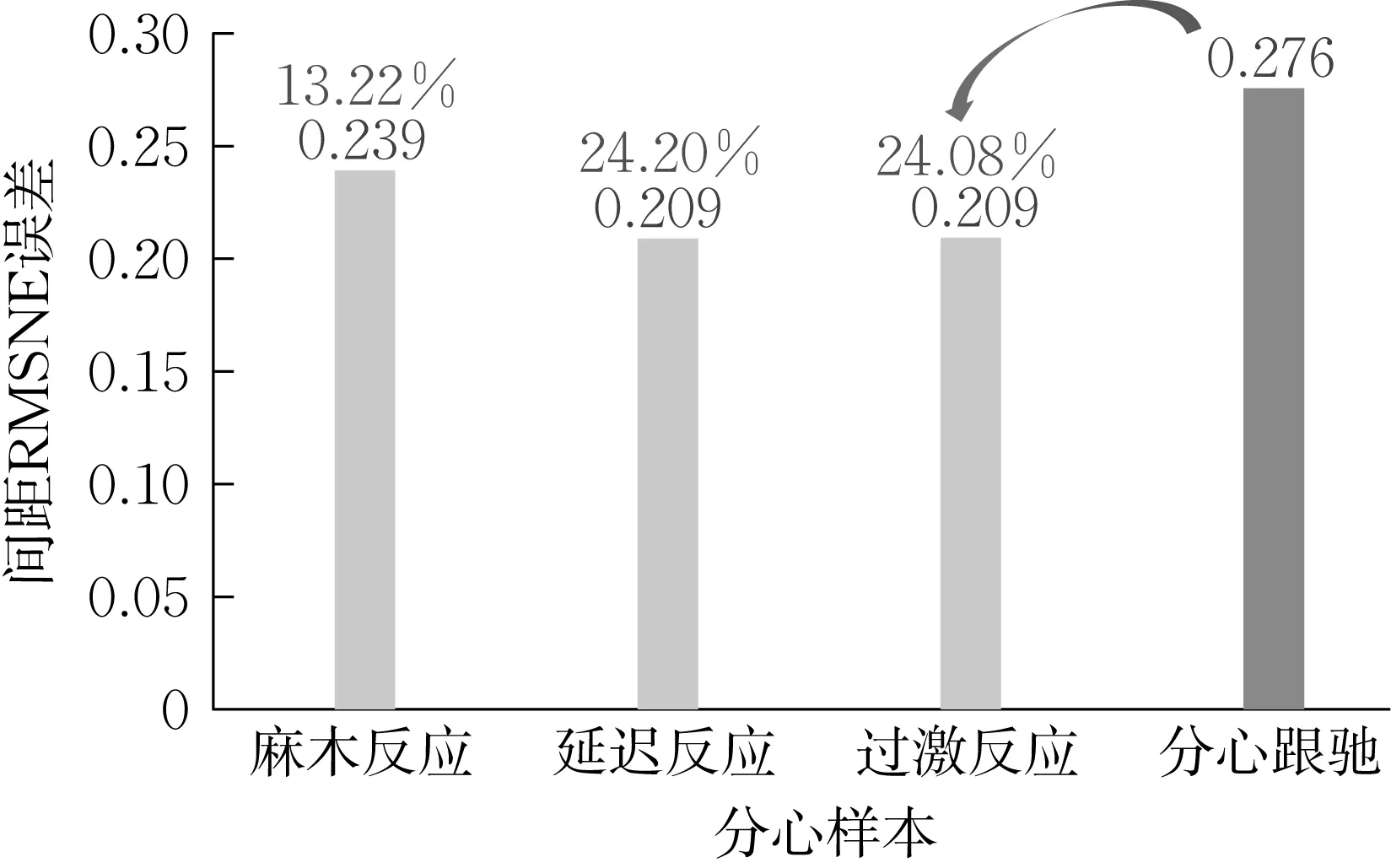
图11 IDM模型在分类优化后3类行为上适应性对比Fig.11 Adaptabilities of IDM on three finalized kinds of distracted CF
2.2 3类分心跟驰行为建模
对结构改进法与参数标定法进行对比,探索对于分心跟驰行为进行建模的最优方法。
利用前述标定方法分别对2个结构改进模型(AIDM和TDIDM)进行标定,标定后的误差如图12所示。结果显示,在3种类型的分心中,参数标定方法的IDM模型的标定误差仍然最小,即结构改进模型在3类分心跟驰行为上的适应性不如经典IDM模型。总的来说,分类后的IDM模型对分心跟驰行为的适应性显著优于结构改进的跟驰模型,即分类后参数标定的IDM模型就可以完成对分心跟驰行为的建模。

图12 改进模型适应性结果Fig.12 Comparative results of adaptabilities of improved CF model
根据最终对3类分心跟驰行为的IDM模型标定结果,对3类分心跟驰行为给出推荐参数值,如表1所示。

表1 跟驰行为参数推荐值Tab.1 Recommended parameter values of different kinds of CF behaviors
3 结语
分心跟驰行为作为一种普遍存在的驾驶行为,对交通流稳定运行有着显著的影响。为了填补以往研究针对分心跟驰行为分类和建模的不足,基于大量自然驾驶数据对实际驾驶环境中的分心跟驰行为进行提取和分类,分析了现有经典跟驰模型和改进分心跟驰模型在真实分心行为中的表征能力,并给出了分心跟驰行为的推荐建模方法。主要结论如下:
(1)基于自然驾驶数据提取大量分心跟驰样本,通过驾驶行为刺激-反应框架初分类和分类精度交叉验证,按分心特征分为麻木反应、过激反应和延迟反应3类。
(2)评估了4类经典跟驰模型对分心跟驰行为的适应性,结果表明IDM模型表现最佳,模型精度分别领先GHR模型、Gipps模型和Wiedemann模型21.42%、47.73%和14.42%。
(3)为进一步提高不同分心类别下的跟驰行为建模精度,基于推荐的分心状态建模基本模型IDM,分别提出了参数标定和结构化修改2类模型改进方案。结果表明,对IDM模型参数进行标定即可较好地表征不同类别的分心跟驰行为。
下一步将利用所提出的分心跟驰行为建模方法,结合分心发生概率模型和持续时间进行建模,并在仿真系统中准确复现分心跟驰行为。
作者贡献声明:
朱奕昕: 数据搜集、建模分析、论文撰写。
张 铎:参与研究的构思设计、论文修改。
王俊骅:数据整理搜集。
孙 剑:参与研究的构思设计、对重要学术性内容做出关键性修订。
