视景显示系统视场角测试研究与应用
2023-07-25杨衍舒孙双双杨宛璐
叶 猛,杨衍舒,孙双双,杨宛璐
(航空工业洪都,江西 南昌,330024)
0 引言
飞行模拟器视景显示系统主要用来模拟飞行仿真时座舱外的真实景象,为飞行员提供飞行视觉环境[1]。视景显示系统由投影仪、显示屏/幕等组成。根据显示成像的特征和原理,多采用虚像和实像两种显示系统。 其中虚像视景显示系统具有图像清晰,纵深感强等优点,多应用于民航的飞行模拟器中。但其硬件成本昂贵,视场角有局限性;而从实像显示系统的投影屏幕结构形状特点来看,球幕显示系统较为常用,其具有光路设计简单,成本适中,能实现大视场等优点,多用于战斗机、歼击机以及直升机等机型的飞行模拟器中。
基于实像显示系统的设计原理,提出了一种视景显示系统视场角测试和计算方法,并详细介绍了利用全站仪测试和球面方程计算过程。通过实像视景系统球体内任意放置的全站仪测试球幕上点的水平角度、垂直角度和距离数据,解算全站仪在球体坐标系(眼位为原点)内的三维坐标;利用全站仪坐标和全站仪测试的球幕上点的水平角度、垂直角度作为输入,通过相应算法计算转换球幕上点的测试角度为眼位处的水平角度、垂直角度,以满足视景系统边缘融合与校正系统调试和视场角测试需求。
1 视场角测试现状
针对球幕实像视景显示系统,目前主要采用全站仪进行测试,将全站仪放置在模拟座舱前舱位置,通过调整高度和方位,使全站仪目镜和飞行员眼位(实像球幕球心)保持一致。因为实像球幕球心是一个三维空间点,不方便确认具体位置,因此需要通过反复目视和多次测量来调整全站仪位置,确保全站仪目镜和实像球幕球心保持一致,否则后续会影响视场角测试的精度。
为了简化全站仪放置程序,提高视场角测试的精度,方便测试人员操作等因素,提出了一种新的视景显示系统视场角测试和计算方法,同时开发了一款计算软件,可用于批量计算和保存球幕上多个点的视场角数据。
2 设计原理
视景显示系统实像球幕作为三维球体,球幕内表面作为一个三维球面,球体的球心与飞行模拟器模拟座舱飞行员眼位保持一致。在球体内任意放置全站仪,以全站仪作为原点建立局部坐标系。在球幕上选取4 个不同的点,全站仪分别测试4 个点的水平角度、垂直角度和距离数据。通过坐标转换,可计算出4 个点相对于球面坐标系的三维坐标。利用该全站仪在球体坐标系内的三维坐标和全站仪实时测试的球幕上点的水平角度、垂直角度(全站仪为原点),通过坐标系转换为眼位(球体坐标系)水平视场角和垂直视场角,从而实现了视景显示系统视场角测试和计算功能。
2.1 全站仪位置坐标计算
在解析几何中,球面方程为x2+y2+z2=r2。假设x 方向平移a,y 方向平移b,z 方向平移c 后达到全站仪放置的位置,则全站仪位置在球体坐标系的坐标为Q(a,b,c),通过局部坐标系到球体坐标系转换,则有方程式:(x+a)2+(y+b)2+(z+c)2=r2,通过分解亦可表示为x2+y2+z2+F1x+F2y+F3z+F4=0。通过选取的4 个点坐标正好联立4 个方程,解出F1、F2、F3、F4的值,进而求取a、b、c、r。 其中a、b、c 即为全站仪相对于球心的坐标。
将全站仪放置在球体内的任意位置,垂直转动全站仪的机头,使全站仪垂直读数为90 度;水平转动全站仪的机头,使全站仪的镜头指向球幕正前方,尽量使全站仪的指向与屏幕的中轴线平行,然后将这时全站仪的水平读数置零,如图1 所示。
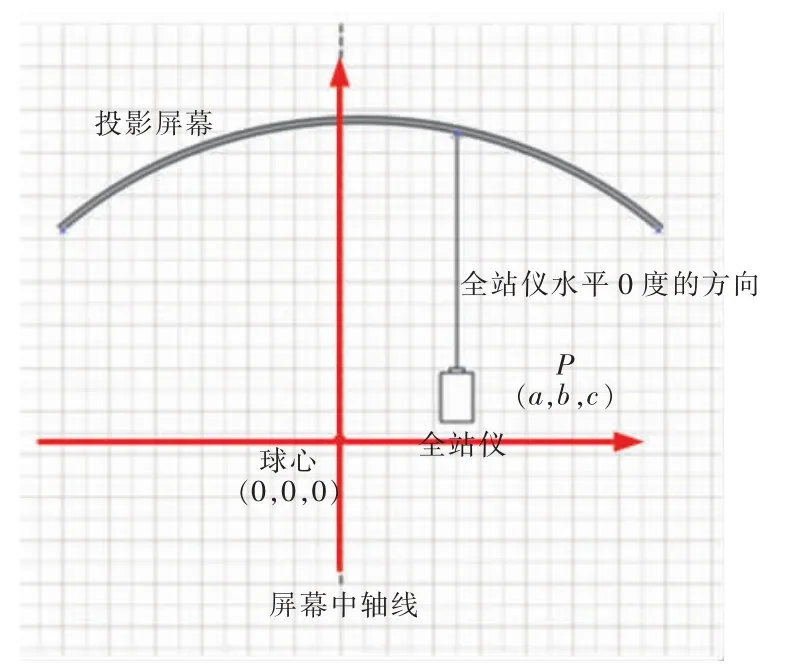
图1 全站仪布置图
用全站仪任意测量球幕上一个点的水平角度、垂直角度以及距离(局部坐标系),共测量4 个点数据。通过4 个点坐标计算全站仪在球体坐标系中的位置坐标。具体计算公式为:
1) 局部坐标系
采用右手笛卡尔直角坐标系,以全站仪位置作为局部坐标系的原点,测试点坐标为Pi(xi,yi,zi),其中(i=1,2,3,4)。
测试点极坐标水平角度φi、垂直角度θi以及距离ri,其中(i=1,2,3,4)。
利用极坐标来表示球幕点Pi的xyz 坐标。其中(i=1,2,3,4)。
2) 球体坐标系统
采用右手笛卡尔直角坐标系,以实像球幕球心作为球体坐标系的原点,如图2 所示。
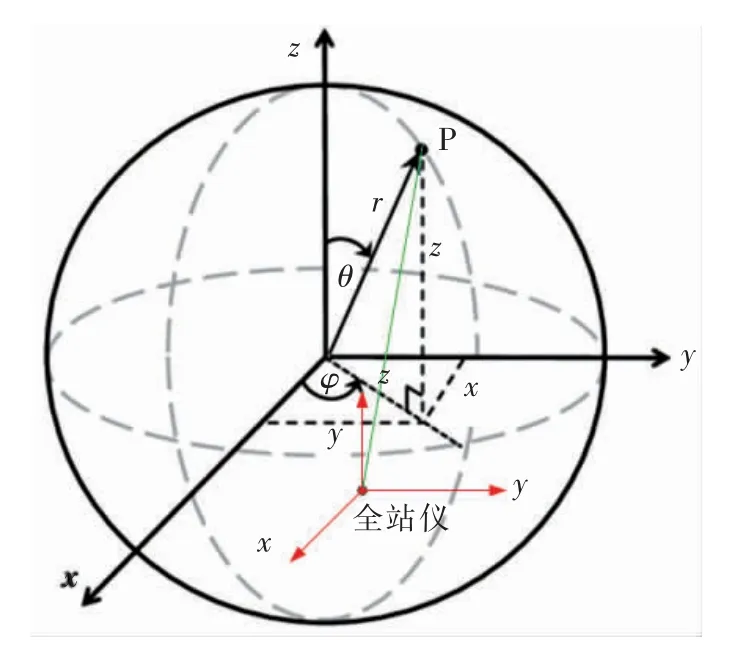
图2 球体坐标系示意图
球面公式为:
测试点坐标为Pi(xi,yi,zi),其中(i=1,2,3,4)。 全站仪位置在球体坐标系的坐标为Q(a,b,c)。通过局部坐标系到球体坐标系转换,测试点相对于球体坐标系的坐标XYZ 表示为:
公式(3)代入公式(2)建立方程组:
公式(4)分解移向后为:
其中
针对公式(5),建立系数矩阵:
即MF=N。
根据克莱姆法则[2],公式(5)的解为:
Dj是把D 中第j 列元素对应地换成常数项N 而其余各列保持不变所得到的行列式。
最后,根据公式(6)和公式(10),计算出a,b,c,R相应的值。
2.2 球幕点角度转换计算
通过全站仪测量球幕上点的水平角度、垂直角度和距离(局部坐标系),使用极坐标公式计算出位置坐标xyz(局部坐标系)。利用坐标系平移公式,计算球幕上点的XYZ 坐标(球体坐标系),最后计算出水平角度、垂直角度(球体坐标系)。
球幕上点的位置坐标(局部坐标系)计算:
球幕上点的水平角度φ′i、垂直角度θ′i以及距离r′i,其中(i=1,2,3,4...n)。 xyz 为点的位置坐标(局部坐标系),代入公式(1),则有:
球幕上点的角度(球体坐标系)计算:
利用坐标系平移公式和公式(11),计算球幕上点的XYZ 坐标(球体坐标系):
且
通过公式(12)方程组,计算求得球幕上点的水平角度(φi)、垂直角度(θi)(球体坐标系):
3 软件设计与实现
视景显示系统视场角测试软件设计采用MFC(Microsoft Foundation Classes,微软基础类库)设计,采用Excel 数据库保存记录的数据和转换计算的数据。包括两个功能模块:全站仪位置坐标计算和球幕点角度转换计算。
1) 全站仪位置坐标计算
通过视景系统球幕内任意放置的全站仪测试球幕上点的水平角度、垂直角度和距离数据,解算全站仪在球体坐标系(眼位为球心)的三维坐标。
2) 球幕点角度转换计算
利用该全站仪在球体坐标系内的三维坐标和全站仪实时测试的球幕上点的水平角度、垂直角度(全站仪为原点),转换为眼位(球体坐标系)水平视场角和垂直视场角。
视景显示系统视场角测试的软件设计总体流程和界面效果如图3、图4 所示。
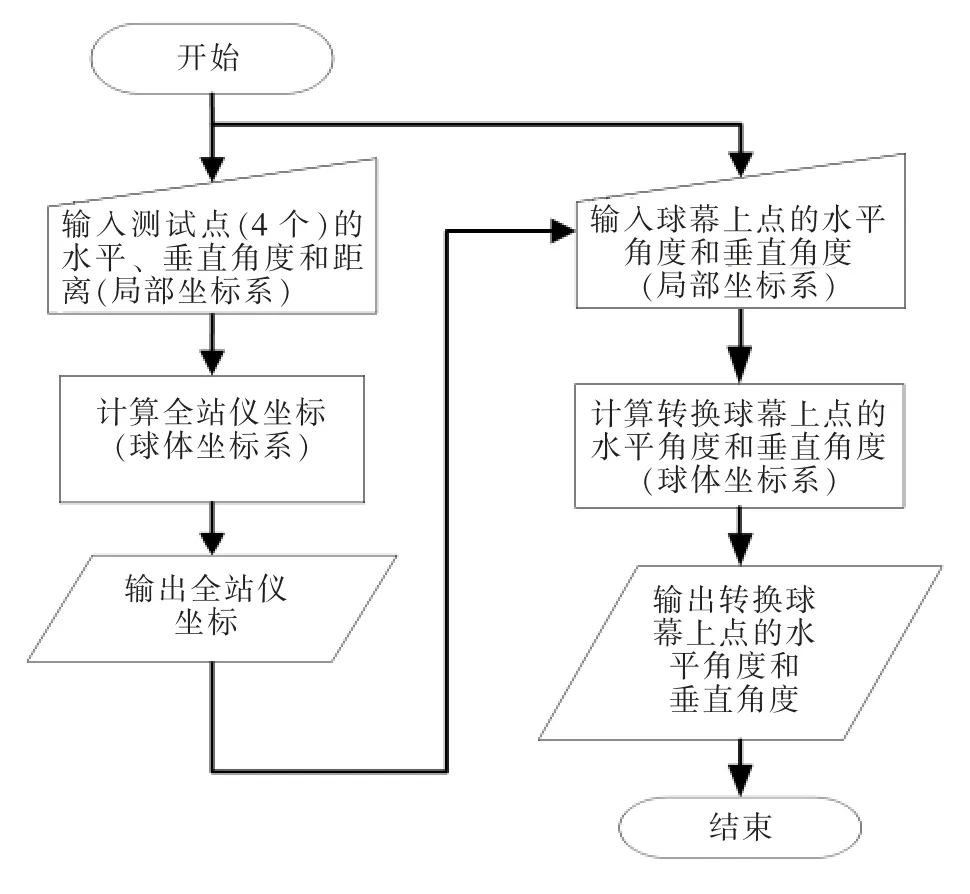
图3 总体流程图
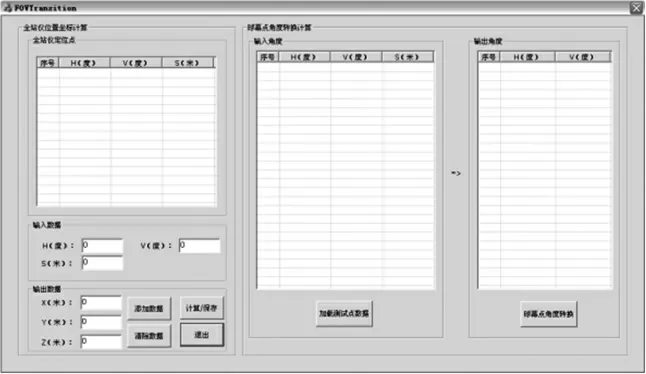
图4 软件界面效果图
4 试验结果
为验证视景显示系统视场角测试软件功能是否满足要求,在飞行模拟器上进行测试工作,分别测试添加数据模块、清除数据模块、计算/保存模块、加载测试点数据模块和球幕点角度转换计算模块等功能模块。 测试结果如图5、图6 所示。

图5 全站仪位置坐标计算图

图6 球幕点角度转换计算图
测试结果数据图中,首先通过全站仪测试的球幕上4 个点水平角度、垂直角度和距离数据,计算全站仪位置坐标;然后通过全站仪在球幕上测试多个点的水平角度和垂直角度,记录在Excel 表格中,通过软件界面加载该数据并显示,最后计算和显示球幕上点相对于飞行员眼位(球体原点)的水平角度和垂直角度,达到设计要求。将视景显示系统视场角测试软件应用于飞行模拟器的视景显示系统指标测试中,效果良好。
5 结语
针对飞行模拟器视景显示系统视场角度测试问题,将4 点定位全站仪位置坐标方法及三维空间坐标转换公式应用于飞行模拟器视景显示系统视场角测试中,并介绍了视景显示系统视场角测试软件设计,在飞行模拟器上进行测试工作。测试结果表明,视景显示系统视场角测试软件的应用不仅避免了传统方法的局限性,而且提高了测试数据精度。