旋翼无人机高速化技术路线与现状分析
2023-07-25孟显峰芦志明李玉斌涂天佳
孟显峰 芦志明 李玉斌 涂天佳
高速化技术作为旋翼无人机的重要发展方向,在高性能旋翼设计技术、低阻设计技术及新构型设计技术的强力支撑下,已经取得长足的进步与发展。由于不受人员安全等因素的限制,国内相关高速旋翼无人机的发展速度已经明显领先于有人机。与国内不同的是,国外凭借长期积淀的旋翼飞行器技术与领先的技术优势,在无人化改型技术尚未取得突破前,有人机高速化技术已经快速发展。无论如何,无人先行具有獨特优势,旋翼无人机率先应用先进技术,以无人机先进技术研究化解有人机的技术风险,这将成为旋翼飞行器领域的一种全新探索模式,也将进一步推动旋翼无人机高速化技术的快速发展。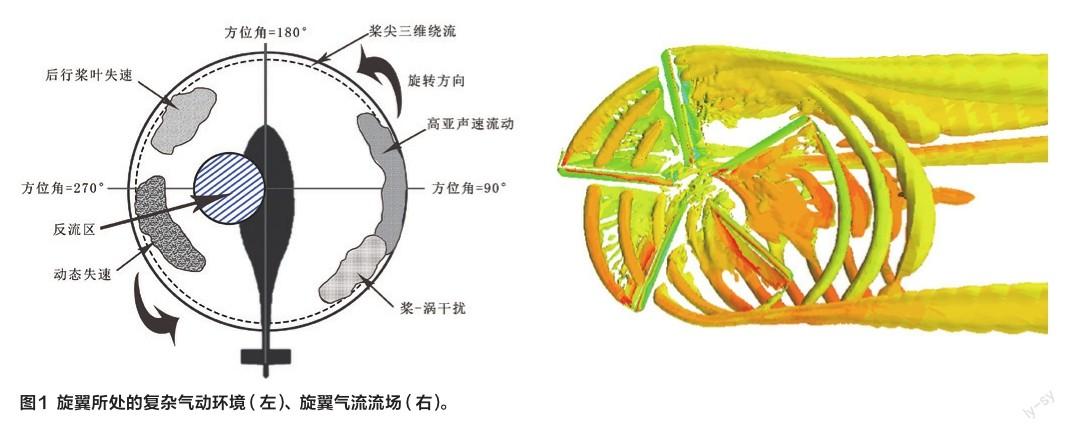
旋翼无人机的最大平飞速度主要受旋翼所处的复杂气动环境的影响,该气动环境具有非对称、强耦合、强干扰、动载荷严重等典型特征。当旋翼无人机高速前飞时,旋翼的前行桨叶会出现激波,后行桨叶出现气流分离,进而限制了旋翼无人机的前飞速度。为了大幅提升旋翼无人机的飞行速度,满足未来复杂战场环境的迫切需求,以BERP-IV、“蓝色边缘”(Blue Edge)、ABC等为代表的先进桨叶,以A160T无人直升机为代表的高效低阻气动外形,以复合式、倾转式、尾座式、停转式为代表的新构型等一系列新的设计技术应运而生并取得了一定的应用成果。
高速化技术路线与应用
先进旋翼设计技术
1.三维桨尖设计技术
桨尖设计直接关系到旋翼的性能、噪声和振动水平,先进三维桨尖设计不仅能有效提升旋翼无人机的飞行速度和任务载荷重量,也能降低旋翼的气动噪声。因此,世界主要旋翼飞行器制造商均投入大量财力、物力和人力,开展相关理论和应用研究,并取得了丰硕的技术成果。基于缓解桨尖的空气压缩效应原理,技术人员设计桨尖外形,实现了最大平飞速度提升。早期,受制造技术的限制,旋翼飞行器一般采用金属矩形桨叶,随着复合材料技术的发展和成熟,旋翼飞行器有可能采用复杂三维桨尖设计与制造技术。当前,各主要旋翼飞行器制造商均已形成各具特色的桨尖设计方案。如英国的BERP-IV桨叶的桨尖设计方案和俄罗斯直升机公司最新展出的新型桨叶的桨尖设计方案。其中,BERP(British Experimental Rotor Programme)系列桨叶是英国于1975年开始研制的先进桨叶,在历经四代优化后,BERP-IV桨叶已经问世,该桨叶采用复合材料制成,桨尖设计技术先进,能大幅度提高旋翼飞行器的最大飞行速度。
国内相关科研机构和高校已经对旋翼专用翼型和桨叶气动布局开展了大量理论研究和验证试验,取得了一定的技术成果,但与国外相比,仍然存在较大的技术差距。抛物线后掠桨尖作为国内技术成熟度最高、型号应用最广的一款桨尖,它可以有效减缓桨尖的空气压缩效应,提高阻力发散马赫数,在桨尖速度保持不变的条件下,进一步提高旋翼无人机的最大平飞速度,使旋翼的最大悬停效率提升2.5%左右。为全面满足装备战技指标的要求,国内一些旋翼无人机使用了具有抛物线后掠桨尖和下反桨尖的桨叶。在型号研制过程中,旋翼塔、铁鸟及飞行试验表明,该桨尖能明显提升旋翼性能和改善噪声水平。未来,随着我国新一代旋翼专用翼型、先进桨叶气动布局等关键设计技术取得突破,旋翼无人机将换装更为先进的旋翼系统,以大幅提升飞行性能。
2.“前行桨叶概念”旋翼技术
“前行桨叶概念”(ABC)旋翼最早由西科斯基公司在20世纪60年代提出,核心目的是突破常规旋翼的气动限制,大幅提高旋翼飞行器的飞行速度。ABC旋翼由上下两副距离相对较近且旋转方向相反的共轴刚性旋翼组成,ABC旋翼产生操纵力矩的原理与常规旋翼完全不同,常规旋翼的操纵力矩主要来源于桨盘的倾斜,而刚性旋翼由于挥舞变形量很小,ABC旋翼的操纵力矩主要来源于上下旋翼的升力偏置。当旋翼飞行器高速前飞时,上下旋翼的后行侧基本不产生升力,升力主要由前行侧提供,这就避免了后行桨叶的失速限制,同时上下两副旋翼桨毂弯矩的方向相反,使弯矩正好相互平衡。采用ABC旋翼技术的旋翼飞行器通常具有独立的推力系统,推力系统主要克服无人机高速前飞时的阻力,目前应用最多的是尾部推力螺旋桨方案。旋翼飞行器采用尾部推力螺旋桨,其最大平飞速度可以达到单旋翼带尾桨飞行器的两倍左右。
基于ABC旋翼技术,西科斯基公司已经成功推出X2、S97、SB-1等有人机,同时给出了未来旋翼无人机的概念图。国内很早就开始跟踪ABC旋翼的相关技术和型号发展概况,并开展大量理论研究和试验。其中,中国直升机设计研究所对“绝影”旋翼无人机ABC旋翼技术进行了初步探索。
3.刚性旋翼+单侧短翼概念方案
为了克服ABC旋翼操纵机构复杂、结构重量重等缺点,美国的马里兰大学提出了一种刚性旋翼+单侧短翼的全新概念方案。相较于ABC旋翼,该方案只采用了一副刚性旋翼,其产生操纵力矩的原理和ABC旋翼一致。因此,为了平衡由升力偏置所带来的滚转弯矩,马里兰大学的设计团队采用了机身单侧加装短翼的方案,该短翼设计有襟翼,可对旋翼无人机的姿态进行配平。相比于ABC旋翼,该方案存在两个明显的缺点,一是单副刚性旋翼的桨毂弯矩和短翼的滚转弯矩均直接作用于机体结构,势必会增加机体结构的重量;二是在无人机低速飞行和悬停状态下,旋翼下洗流与单侧短翼产生气动干扰,导致整机的垂直增重系数变大,降低了旋翼无人机的悬停和低速飞行性能。据分析,旋翼飞行器采用机身单侧加装短翼的方案,其最大平飞速度可达460km/h左右。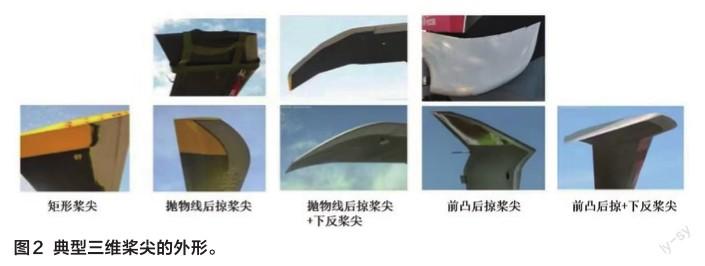

国内外针对该概念方案的理论研究和应用相对较少,因此技术成熟度不高,暂不具备型号应用基础。目前,只有美国的查理斯直升机(Challis Heliplane)公司基于这一方案开发了一种超轻型无人机验证机,并初步开展了相关试验。
部件减阻设计
旋翼无人机高速前飞时的阻力主要来源于机身、桨毂、起落架等部件的废阻。为了提升最大前飞速度,技术人员必须开展相关部件的减阻设计。执行情报、监视、侦察、火力支援等任务的旋翼无人机,其前机身设计不需要考虑视野、人机功效等与驾驶舱相关的设计要素,同时,中后机身设计也无客货舱的约束,因此这类旋翼无人机的机身外形可以最大化地采用流线形设计,例如美国的A160T无人直升机。执行物资运输任务的中大型旋翼无人机,其货舱外形设计需要满足物资装卸的要求,因此技术人员只能在其基本外形的基础上,采用一些流动控制手段,尽可能地降低机身的阻力系数,如在尾舱门左右两侧增加边条,在尾舱门下边缘布置涡流发生器等。
在全机废阻中,桨毂和旋翼轴产生的废阻所占的比例相对较大,尤其是ABC旋翼,其桨毂废阻已经达到全机废阻的50%左右。目前,桨毂和旋翼轴主要采用整流罩进行减阻,气动外形综合优化设计可以大幅降低上述部件的阻力系数,但同时结构重量也会增加。因此,在方案设计过程中,技术人员需要综合权衡上述两点的利弊。无论是常规单旋翼还是新兴的共轴刚性旋翼,基于计算流体力学和风洞试验的方法,技术人员已经形成一套成熟的减阻方案并在相关型号上开展了实际应用。高速旋翼无人机的起落架一般采用可收放设计,不可收放轮式或滑橇式起落架可以采用与桨毂和旋翼轴相同的降低废阻的技术路线,以达到减阻设计目标。
新构型设计
新构型设计作为旋翼飞行器向高速化发展的主要技术路线之一,其核心思想是将旋翼的多种功能进行单一化。常规旋翼飞行器的旋翼既是升力面也是推力面,旋翼飞行器采用新构型设计,其旋翼在高速飛行状态下仅提供升力或推力。高速飞行器主要有复合推力式、倾转式、尾座式、停转式等构型。
1.复合推力式构型
目前,复合推力式旋翼无人机尚无明确的统一定义。本文介绍的复合推力式无人机是指在常规旋翼(不含刚性旋翼)基础上,旋翼无人机重点增加了推力系统,或依据型号实际使用需求,选装短翼。其中,推力系统主要克服无人机高速前飞时的阻力,为无人机提供几乎全部的推力;短翼在前飞时可以提供一定的升力,达到为旋翼卸载的目的,它还可以增加平台的法向过载系数,提高旋翼无人机的机动能力。根据主要部件的布局形式,复合推力式旋翼无人机分为两种类型。一种是无人机尾部加装推力系统,如美国贝尔公司为实施“无人作战武装旋翼机”(Unmanned Combat Armed Rotorcraft,UCAR)计划而推出的一种高速、高生存力、高自主性复合推力式旋翼无人机。在常规旋翼的基础上,该型无人机采用了独特的推力反扭矩系统(PATS),该系统克服无人机高速前飞时的阻力同时,还能够平衡旋翼的反扭矩;另一种是无人机机身两侧分别加装一副推力螺旋桨/拉力螺旋桨,以克服无人机高速前飞时的阻力,而两侧螺旋桨的差动控制实现了反扭矩平衡和无人机航向操纵,如日本川崎重工业株式会社K-“参赛者”(K-Racer)复合推力式旋翼无人机。
复合推力式旋翼无人机的推力系统主要包括定距螺旋桨、变距螺旋桨、矢量推力涵道螺旋桨(VTDP)及UCAR计划所采用的推力反扭矩系统。
2.倾转式构型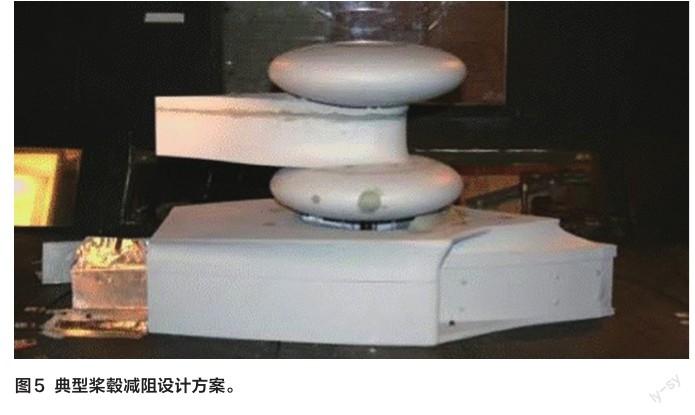
为使无人机同时具有垂直起降和前飞两种飞行姿态,倾转式旋翼无人机应运而生。倾转式构型设计技术在有人机领域已经取得长足的进步,多种倾转旋翼无人机全尺寸验证机已经开展试验。目前,国际上在役、在研的型号主要有贝尔公司V-22、V280倾转旋翼机,莱昂纳多公司AW609倾转旋翼机。为了满足旋翼无人机高速化技术快速发展的需求,技术人员可在有人机技术成果和研制经验的基础上,突破总体设计、过渡模态自主飞行控制等关键技术,推动倾转式旋翼无人机加速成熟。当前,国内外正在研制的倾转式旋翼无人机主要有倾转旋翼无人机、多桨倾转无人机和倾转涵道无人机,其中大部分构型为倾转旋翼方案。随着混合动力、电池等新技术不断发展及其在旋翼飞行器上的应用,多桨倾转式构型已成为当下研究的热点方向,美国国家航空航天局(NASA)GL10多桨倾转无人机作为一种缩比验证机,使用了多个电动小旋翼,在过渡模态下,旋翼、机翼和尾翼同时倾转,类似于有人机的倾转机翼方案,在高速前飞过程中,只有机翼两端的变距螺旋桨工作,而定距螺旋桨均处于阻力最小的折叠状态。在倾转涵道式构型中,最为典型的项目是美国国防预研局(DARPA)、洛马公司、皮亚斯基飞机公司联合开发的“可重构嵌入式航空系统”(Aerial Reconfigurable Embedded System,ARES)项目,该项目旨在为美国海军陆战队物资和伤员远程运送提供解决方案。
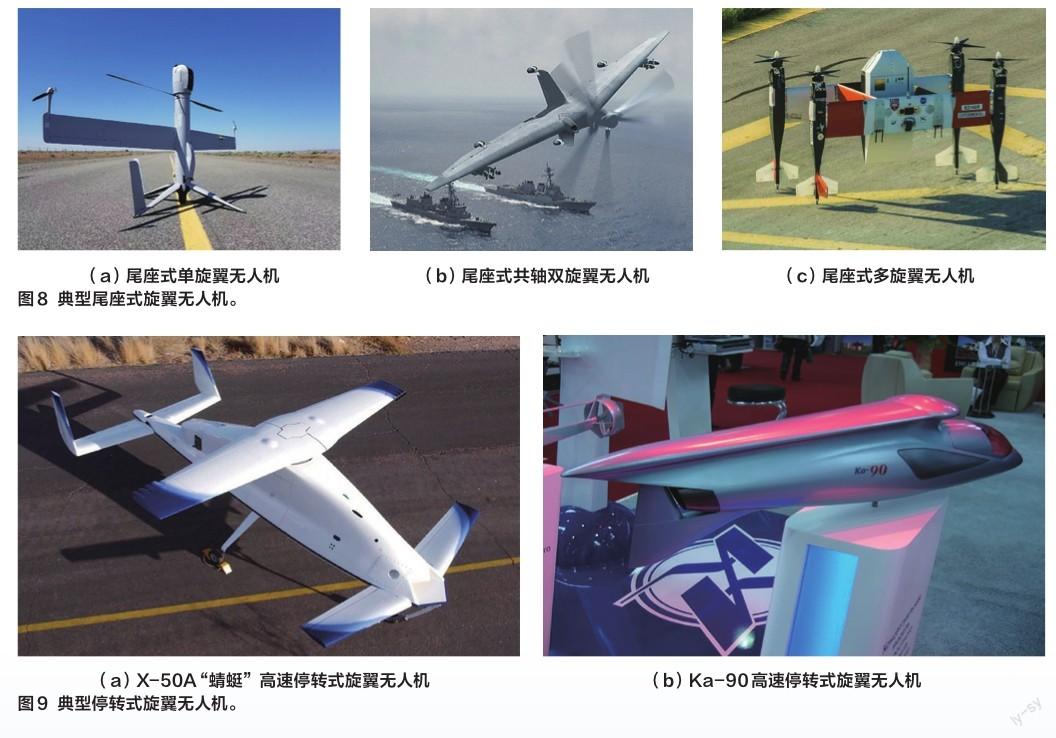
3.尾座式构型
尾座式旋翼无人机是一种具备垂直起降和高速平飞能力的高效装备,已成为国内外重点发展的高速旋翼无人机之一。相比于倾转式构型,尾座式省去了倾转机构,具有结构简单、可靠性高等特点。依据不同的旋翼数量和布局形式,尾座式旋翼无人机分尾座式单旋翼无人机、尾座式共轴双旋翼无人机及尾座式多旋翼无人机等类型。尾座式单旋翼无人机采用具有总距和周期变距功能的常规旋翼,为了平衡旋翼的反扭矩,机翼或其他部件须要加装反扭矩系统,例如航空水平(AEROVEL)公司研制的“弹性旋翼”(Flexrotor)无人机,其两侧机翼的翼尖各加装了一副螺旋桨,用以平衡旋翼的反扭矩。尾座式共轴双旋翼无人机的上下旋翼也采用了常规旋翼,只是省去了反扭矩系统,例如美国国防预研局和海军研究办公室(ONR)联合诺格公司共同研发的“燕鸥”(Tern)尾座式共轴双旋翼无人机。尾座式多旋翼无人机通常采用多个定距或变距螺旋桨,控制系统对定距螺旋桨进行转速差动控制或对变矩螺旋桨进行总距差动控制,实现反扭矩的平衡,如贝尔公司APT 70尾座式多旋翼货运无人机。
4.停转式构型

停转式旋翼无人机是一种新颖构型的高速旋翼无人机,具有相当大的发展潜力。根据旋翼旋转停止后的位置和功能,停转式旋翼无人机分为旋翼/机翼转换无人机、旋翼/机身融合无人机。由于需要兼顾旋翼和机翼的工作模式,旋翼/机翼转换无人机一般采用小展弦比机翼、前后缘对称的桨叶,当该型无人机高速前飞时,旋翼旋转到指定方位停止并锁死,从而充当机翼为无人机提供前飞所需的升力,而旋翼的旋转则可通过桨尖喷气的方式来实现,这样可以同时省去传动和平衡反扭矩系统,典型代表是波音公司X-50A“蜻蜓”高速停转式旋翼无人机。与旋翼/机翼转换无人机的最大区别是,旋翼/机身融合无人机的旋翼在锁死后,不再充当机翼,而是与机身进行融合,升力和操纵力由其他部件提供,该构型方案目前仍然停留在概念设计阶段,如卡莫夫设计局Ka-90停转式旋翼无人机。
结束语
高速飞行是下一代军用旋翼飞行器的重要指标,旋翼无人机速度包线的拓展对无人机应用范围扩大、作战能力提升具有重要意义。高速化技术作为旋翼无人机未来的重要发展方向之一,目前已经呈现出“多线并行发展”的态势。未来,在新概念与新技术的推动下,旋翼无人机的飞行速度将会进一步取得突破性提升。