一种五自由度修剪机器人结构设计与分析
2023-06-17桂林古劲张宾李传军陈度张亚伟
桂林 古劲 张宾 李传军 陈度 张亚伟

摘要:为满足多样化景观绿篱修剪造型对修剪机器人工作空间、结构刚度和强度的需求,设计一种用于园林绿植的五自由度修剪机器人结构。首先采用D-H法对机器人进行建模与运动学分析,利用蒙特卡洛法得到机器人的工作空间;然后以球形绿篱为修剪目标,基于机器人有效空间体积比和速度全域性能指标,确定机器人臂架结构主要杆件的尺寸;最后对臂架结构进行有限元静力学和振动模态仿真分析。仿真结果表明:当大臂尺寸为800 mm,小臂尺寸为900 mm,腕臂尺寸为350 mm时,该机器人垂直修剪作业范围为0~2 000 mm,水平修剪作业范围为-1 300~1 300 mm,工作空间可满足园林绿篱的修剪需求;臂架结构的最大等效应力为34.245 MPa,最大变形为1.897 1 mm,刚度和强度均满足技术指标的要求,且其固有频率可有效避开外界频率,避免共振现象。本研究为景观绿篱修剪机器人研制提供机械结构设计方法与方案,具有一定的应用价值。
关键词:修剪机器人;运动学分析;有效空间;全域性能指标;有限元分析
中图分类号:TP242
文献标识码:A
文章编号:2095-5553 (2023) 03-0191-08
Abstract: In order to meet the needs of the diversified landscape hedge trimming model for the working space, structural rigidity and strength of the trimming robot, a fivedegreeoffreedom trimming robot structure for garden green plants was designed. First, the D-H method was used to model and kinematics analysis of the robot, and the Monte Carlo method was used to obtain the robots working space; Then, with spherical hedges as the pruning target, the dimensions of the main rods of the robot arm structure were determined based on the robots effective spatial volume ratio and velocity full domain performance indexes. Finally, the finite element static and vibration modal simulations were performed for the boom structure. The simulation results showed that when the size of the big arm was 800 mm, the size of the forearm was 900 mm, and the size of the wrist arm was 350 mm, the vertical trimming range of the robot was 0-2 000 mm, and the horizontal trimming range was from -1 300 mm to 1 300 mm, and the working space could meet the demand of garden hedge pruning; The maximum equivalent stress of the boom structure was 34.245 MPa, and the maximum deformation was 1.897 1 mm. The rigidity and strength can meet the requirements of technical indicators, and its natural frequency can effectively avoid external frequencies and avoid resonance. This research provides a mechanical structure design method and scheme for the development of a landscape hedge trimming robot, which has certain application value.
Keywords: pruning robot; kinematic analysis; effective space; global performance index; finite element analysis
0引言
綠篱作为城市园林绿化的重要组成部分,主要起分隔空间、净化空气以及防护等作用[12]。绿篱作为季节性生长植物,需要定期修剪养护[34]。目前园林修剪以手工修剪枝杈方式为主,效率低、强度大、质量不稳定、复杂造型对工人技术要求高[5]。因此,一种自动化、智能化绿植修剪机器人的研制具有重要意义。
在绿篱修剪机器人领域,国外的研究较早且处于领先地位[6]。如德国某公司研制的HS20园林树木修剪机,在机械臂末端装有往复式切割器,修剪半径和最大修剪高度分别达到2 m和5.9 m。近些年,国内也有诸多针对实现不同功能的绿篱修剪设备的研究。许珂等设计一种以扫路车为载体的绿篱修剪机器人,通过更换不同刀具,满足修剪形状需求。唐果[7]设计一款用于公路绿篱修剪的机器人,通过控制末端回转式锯齿圆盘对绿篱进行修剪。王金刚等[8]设计了一种用于绿篱隔离带的修剪装置,采用双面刀具同时修剪,提高了修剪效率。对于形状复杂、造型精度要求高的绿植,由于空间限制,通常根据特殊的形状要求被动地进行刀具与轨迹仿形设计[910],此方法不具有普适性。
针对当前绿篱修剪设备的不足,为满足修剪末端执行器姿态灵活性要求,本文设计了一种用于园林绿植修剪的五自由度机器人,并对机器人结构参数进行相应的分析与优化。
1园林绿化绿篱园艺特性
城市园林绿化常见的绿篱植物一般由常绿灌木和小乔木构成[4]。一般根据高度不同将绿篱分为矮、中、高三种绿篱。表1列出了常见绿篱的分类及其作用与适应场所[11]。园林造型绿篱主要由动物景观造型以及球形、柱形、方形和锥形等几何造型[1213],对修剪姿态的调整要求较高;绿化带与公园草坪等平面绿篱主要修剪为面积较大的平面。本文设计的修剪机器人主要以园林绿化的复杂景观造型、绿化带和园林绿地草坪为作业对象。
2修剪机器人结构设计
2.1确定技术指标
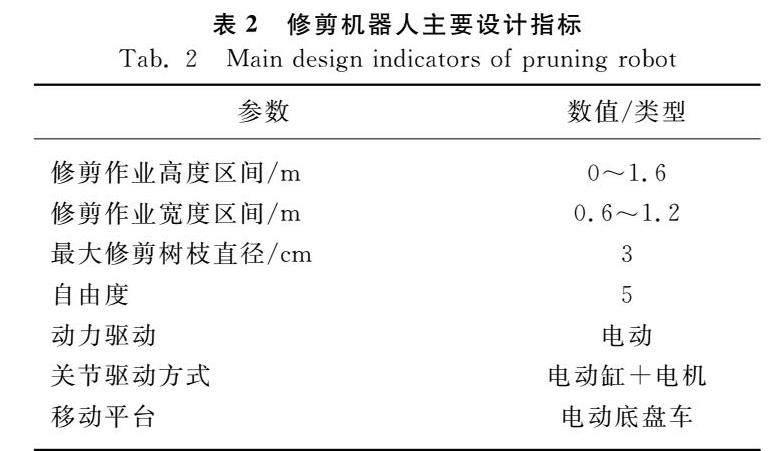
根据市场调研及相关园林绿化标准,确定所设计的针对园林绿篱的修剪机器人结构相关技术指标与参数,如表2所示。
其中,为保证修剪复杂造型绿篱时末端姿态的灵活性,按照位置和姿态的耦合及解耦两种情况分析修剪机器人的自由度[14]。
被修剪绿篱在修剪机器人两侧时,需要三个自由度来实现修剪末端的前、后、左、右、上、下移动,实现修剪刀具移动到指定的空间位置;且需要两个自由度实现刀具姿态的调整,进而保证刀具与绿篱相切的修剪技术要求。因此确定本文设计的修剪机器人为五自由度串联机构。
2.2总体结构方案设计
本文修剪机器人设计方案主要由末端修剪装置、主体臂架结构、移动底盘小车、旋转平台、各关节驱动构件以及控制系统组成。通过五个旋转关节串联连接,工作范围大,工作空间灵活,可适应多种复杂形状造型的绿篱修剪。根据修剪机器人设计的主要技术指标,设计出三维模型,如图1所示。
1) 末端修剪装置。修剪刀具一般分为往复式和回转式等。往复式刀具主要是通过电机驱动动刀片相对于静刀片进行往复运动来对绿篱进行切割修剪;回转式刀具由修剪电机直接驱动,刀具的齿数、刀片锋利程度以及电机转速是影响修剪效果的主要因素。本文采用的修剪电机电压为48 V,功率为600 W,其转速可达4 500 r/min,与60齿、255 mm直径的回转式合金刀片组合使用(表3)。刀具安装简单、电机动力强劲,可满足多种绿篱植物的修剪作业动力要求。末端修剪装置如图2所示。
2) 臂架结构。臂架结构主要包括旋转平台、大臂、小臂和腕臂圆筒连接件以及各个关节驱动构件,如图3所示。
本文采用伺服电动缸和闭环步进电机作为机械臂关节角度的驱动装置,其中电动缸与旋转平台、大臂和小臂进行连接,对大臂和小臂进行支撑,减少机器人末端修剪装置的重量对臂架结构的影响,增加修剪机器人的整体稳定性,应对修剪过程中的修剪电机振动的情况;闭环步进电机内置增量式编码器,运动精度高,可避免开环步进电机丢步现象,提高修剪过程中的刀具空间位姿的准确性。回转关节转动副的结构设计采用成对角接触球轴承,通过背对背的安装方式固定在轴承轴上,来提高轴抗变形能力,以应对回转轴在对机构进行回转支撑过程中受到的轴向与径向载荷,增强机构的承载能力和刚度。
3修剪机器人臂架结构运动学分析
3.1臂架结构的运动学模型
根据D-H法则[15]建立图4所示的各连杆坐标系,确定D-H连杆参数表,如表4所示。表4中α、a、d、θ分别表示连杆扭角、连杆长度、连杆偏置和关节转角。
3.2机器人臂架工作空间分析
根据机械结构特点、机器人臂架结构运动方式以及修剪对象的相应技术指标参数,确定臂架结构尺寸参数和关节运动范围。
根据旋转平台确定,a1=245 mm;旋转平台距地面的高度即小车移动平台高度d1=600 mm;末端旋转电机安装在腕臂侧边偏移距离d4=65 mm;由修剪电机安装位置决定,dp=80 mm。
臂架结构尺寸直接影响机器人的工作空间及修剪效果,为满足机构修剪作业高度与宽度等设计技术指标要求,综合考虑机械臂运动性能,设定取值范围a2=700~1 000 mm,a3=900~1 200 mm,d5=300~500 mm。
关节运动范围的确定。旋转平台转角θ1,根据修剪范围的要求与移动底盘的限制,θ1的范围为[-150°,150°];θ2与θ3分别由其对应驱动的电动缸行程决定,关节变化范围分别为[77°,116°]和[80°,130°];为保证修剪刀具不与小臂碰撞,限制θ4范围为[-30°,210°];θ5无限制,范围为[-180°,180°]。
本文选择蒙特卡洛法[16]求解机械臂的工作空间。再通过MATLAB仿真,生成机械臂末端执行器的工作空间点云图如图5所示。
3) 将步骤2中的θi带入机器人正解表达式,求得末端执行器的位置坐标。
4) 设置随机数N,编写算法程序,绘制N个状态下末端执行器的位置点,组合成工作空间点云图。
由蒙特卡洛法求解步骤可以看出,影响机械臂工作空间的因素有:机械臂尺寸参数即正运动学方程、关节运动范围和随机数N值的大小。N值越大,越能反应机械臂工作空间的准确性,本文取N=10 000。
由图5可以看出,修剪机器人的工作空间关于x-z 平面对称,近似于带有空腔的球体,可以看成在y-z 平面的截面绕旋转平台旋转θ1组成,将θ1限制在0°,通过MATLAB仿真得到工作空间在x-z平面上的截面投影圖如图6所示。
4机器人臂架结构尺寸分析
4.1速度全域性能指标
机器人运动学性能直接影响其运动效果,采用基于工作空间的全局性能指标[17]作为评价机器人运动学性能依据,对机械臂结构参数进行分析,使机器人获得更好的工作性能。
机器人臂架结构待定的机构尺寸主要有大臂a2、小臂a3和腕臂d5,利用式(5)计算大臂小臂以100 mm为步长,腕臂以50 mm为步长改变机构参数值而得到的80个不同尺寸下机构的速度全域性能指标值。然后两两组合分成三组,根据每组的性能指标ηJ值,绘制其全域性能图谱,如图7所示。
由图8可以看出,在给定范围内全域性能指标与大臂尺寸a2成正比,与小臂a3和腕臂d5成反比,当a2=850~1 000 mm,a3=900~1 050 mm,d5=300~440 mm时,修剪机器人机构ηJ值较大,在工作空间内运动的速度输出误差较小。为修剪机器人尺寸参数的优化设计与选择提供了理论依据。
4.2有效工作空间指标
机械臂的可达工作空间为末端执行器能够达到的所有空间点的集合,但在机械臂实际修剪工作中,需要末端执行器与绿植相切的姿态进行修剪。使末端执行器以工作要求的姿态到达所有点的集合称为有效工作空间。
本文以球形绿篱为例,分析机械臂的有效工作空间,并以有效工作空间体积比相对最大为目标,优化机器人臂架结构尺寸选择范围。通过简化分析有效工作空间球在x-z平面上的有效圆投影,由图6设圆心坐标为M(x,y,z),即
以大臂a2和小臂a3为变量,采用点云包络的方法求取可达工作空间的体積。通过求得最大有效空间球半径与可达工作空间体积,计算球体积与可达空间的体积比,绘制大臂和小臂在不同尺寸下对有效工作空间体积比的影响曲线,如图9所示。
由图9可知,有效工作空间体积比与小臂a3的变化成负相关,与大臂a2成正相关。在保证工作空间最高点和最低点要求的基础上,结合图7对速度运动性能指标的分析,最终确定机器人臂架结构大臂、小臂、腕臂的尺寸分别为800 mm、900 mm、350 mm。以此参数对机器人进行工作空间分析,得到修剪机器人工作空间p点范围为px=-1 300~1 150 mm,py=-1 300~1 300 mm,pz=0~2 000 mm,满足修剪范围的设计要求。
5机器人臂架结构的仿真分析
5.1静力学分析
利用ANSYS Workbench模块对修剪机器人臂架结构进行静力学分析,对工况载荷下机器人臂架结构的刚度和强度进行验证。为提高有限元仿真分析计算效率,先对臂架三维模型结构进行简化处理,臂架结构采用材料6063-T5 (GB)铝型材和Q345结构钢,其材料属性见表5。
以5 mm为网格单元平均尺寸进行网格划分,共得到网格单元244 086个,节点787 233个。修剪机器人在工作时,臂架结构主要承受自重载荷和外部切割阻力载荷,其中切割阻力载荷为600 N[1819],在施加载荷与约束后,得到机器人臂架静力学分析云图,如图10所示。
由图10可知,修剪机器人臂架结构等效应力主要分布在小臂与腕部电机连接件的接触部分,其最大等效应力值为34.245 MPa,小于材料的屈服强度,其强度符合设计要求;修剪机器人工作过程中最大变形为1.897 1 mm,主要是臂架结构受自重载荷和修剪阻力引起的变形,主要表现为修剪刀具末端的位移变形,变形量在绿篱修剪作业的要求范围内,因此臂架结构的刚度满足设计要求。
5.2模态分析
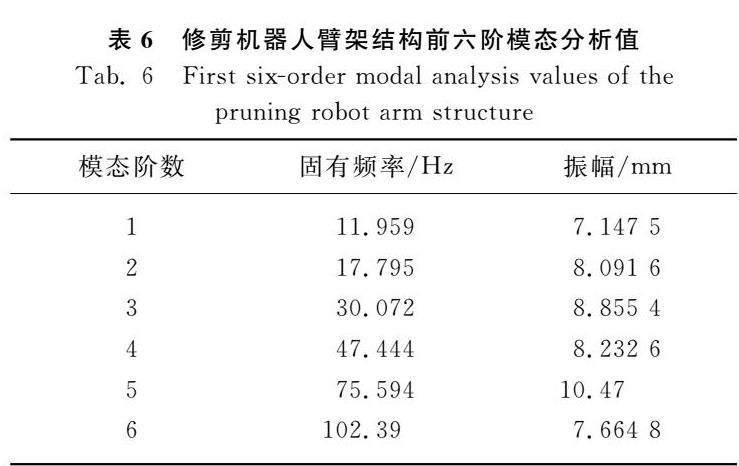
利用ANSYS Workbench中的Modal模块对修剪机器人臂架结构振动模态进行仿真分析,确保修剪机器人的固有频率避开外界的频率,防止共振。模态振型云图如图11所示,前6阶固有频率及振幅数据如表6所示。
修剪机器人在工作工程中的振动来源主要为刀盘转动引起的激振频率65 Hz以及路面的激振频率3 Hz。
由图11和表6可以看出,臂架结构的一阶固有频率为11.959 Hz,大于路面激振频率,在前六阶模态分析中,臂架结构的固有频率随着阶数的递增而平稳增加,且与刀盘转动引起的激振频率不相同,因此不会产生共振。
6结论
1) 本文通过市场调研和查阅相关园林绿化标准,根据设定的修剪机器人结构参数与技术指标,提出了一种五自由度修剪机器人结构设计方案。
2) 采用有效工作空间比指标、速度全域性能指标优化设计了五自由度修剪机器人机构尺寸。当大臂、小臂和腕臂的尺寸参数分别为800 mm、900 mm和350 mm时,其修剪工作空间的高度范围为0~2 000 mm,水平范围为-1 300~1 300 mm,满足园林绿篱的修剪空间要求。
3) 机器人臂架结构静力学分析的最大等效应力值为34.245 MPa,最大变形为1.897 1 mm,满足修剪机器人强度和刚度的设计要求。模态分析的一阶固有频率为11.959 Hz,与外界激振频率不相同,可避免共振现象的发生。通过有限元分析,验证了修剪机器人结构方案的可靠性和稳定性,为进一步实现自动化修剪技术奠定了重要基础。
参考文献
[1]金玲. 论绿篱造型在葫芦岛市城市绿化中的应用[J]. 江西农业, 2016(9): 63.
[2]孙秀梅. 城市园林绿化工程技术研究[J]. 种子科技, 2021, 39(1): 95-96.
[3]陆兆蕾. 城市园林植物整形修剪与造型分析[J]. 现代园艺, 2017(23): 188.
[4]郭雪连. 园林绿化绿篱种植与养护技术探究[J]. 特种经济动植物, 2021, 24(8): 84-85.
[5]武文韬, 曹有为, 冉玥, 等. 一种基于机器视觉识别的智能绿篱修剪机设计[J]. 林业机械与木工设备, 2020, 48(11): 44-46.
Wu Wentao, Cao Youwei, Ran Yue, et al. Design of machine vision recognitionbased smart hedge trimmer [J]. Forestry Machinery & Woodworking Equipment, 2020, 48(11): 44-46.
[6]徐文玉. 园林绿化机械设备的现状与趋势研究[J]. 四川水泥, 2017(4): 141.
[7]唐果. 高速公路綠篱修剪机器人运动特性研究[D]. 重庆: 重庆交通大学, 2018.
Tang Guo. Research on kinetic characteristics of expressway hedgerow pruning robot [D]. Chongqing: Chongqing Jiaotong University, 2018.
[8]王金刚, 邢洁勤, 赵秋俊. 双面绿篱修剪装置有限元分析与优化设计[J]. 机械设计与制造, 2021(1): 91-95.
Wang Jingang, Xing Jieqin, Zhao Qiujun. Finite element analysis and optimization design of doublesided hedge trimmer [J]. Machinery Design & Manufacture, 2021(1): 91-95.
[9]汪群. 一种园艺球面造型裁剪机械装置[P]. 中国专利: CN206776146U, 2017-12-22.
[10]丁奕筝. 组合式园艺修剪刀具[P]. 中国专利: CN108617316A, 2018-10-09.
[11]张新阳. 回转型绿篱修剪机设计及曲面成形关键技术研究[D]. 芜湖: 安徽工程大学, 2020.
Zhang Xinyang. Research on the design and key technology of the rotary hedge trimmer [D].Wuhu: Anhui Polytechnic University, 2020.
[12]卓妙銮. 绿篱的配植与造景[J]. 现代园艺, 2017(6): 120-121.
[13]肖蕾, 吴娟. 植物造型艺术在园林景观设计中的应用[J]. 现代园艺, 2017(22): 70.
[14]毕树生, 于靖军, 宗光华. 微操作手自由度的选择[J]. 中国机械工程, 2003(4): 63-65.
Bi Shusheng, Yu Jingjun, Zong Guanghua. Research on DOF selection of micromanipulator [J]. China Mechanical Engineering, 2003(4): 63-65.
[15]Denavit J, Hartenberg R S. A kinematic notation for lowerpair mechanisms based on matrices [J]. Journal of Applied Mechanics, 1955, 22(2).
[16]徐卫良. 机器人工作空间分析的蒙特卡洛方法[J]. 东南大学学报, 1990(1): 1-8.
Xu Weiliang. Monte carlo technique for workspace analysis of robot manipulator [J]. Journal of Southeast University, 1990(1): 1-8.
[17]Gosselin C M, Angeles J. A global performance index for the kinematic optimization of robotic manipulators [J]. Journal of Mechanical Design, 1991, 113(3): 220-226.
[18]魏倩. 双面高效绿篱修剪机的研究与设计[D]. 南宁: 广西大学, 2014.
Wei Qian. Research and design of a highefficient doublesided trimmer for hedge [D]. Nanning: Guangxi University, 2014.
[19]柴宇奇. 基于外骨骼的绿篱修剪机器人研制[D]. 郑州: 郑州大学, 2019.
Chai Yuqi. Development of a hedge pruning robot based on exoskeleton [D].Zhengzhou: Zhengzhou University, 2019.