连射航炮随动系统稳定控制策略研究
2023-05-31覃泽龙李欣欣关昊天
覃泽龙,李欣欣,关昊天,梁 巍
(广西大学 机械工程学院, 南宁 530005)
0 引言
武装直升机在现代战争中占据重要位置,机载航炮是空空作战和对地打击的主要武器[1]。在执行连续射击目标任务时,机载航炮需要迅速瞄准目标并准确和稳定地射击目标,而机载航炮的射击精度和跟踪性能主要取决于机载航炮随动系统的动静态精度和稳定性[2]。
航炮在连发射击过程中会产生高频连续冲击载荷[3-4],会导致随动系统所受负载转矩不断快速变化,不但影响系统的跟踪性能,还会降低系统的稳态精度。
由于随动系统射击时产生的扰动负载影响,传统比例积分微分控制(PID)技术难以满足随动系统高指标的控制需求[5]。为解决上述问题,许多相关研究人员提出滑模变结构控制技术、预测控制技术、自抗扰控制技术、基于神经网络与各种控制技术相结合的控制策略等等。文献[6]将自抗扰控制ADRC技术与改进粒子群的神经网络算法相结合,仿真结果表明炮控系统的稳定性得到进一步增强。文献[7]提出一种引入滑模面的自组织神经网络控制技术,通过自学习神经网络参数的方法提高系统收敛速度,提高了系统控制的鲁棒性。文献[8]采用干扰观测器观测摩擦转矩实时补偿炮控系统电流环,并在电流滑模控制器中加入了积分环节,削弱了滑模抖振现象。文献[9]设计一种ESO观测和补偿系统的辨识误差,采用新型趋近律减小自适应滑模带来的信号抖振幅值。
在本文中通过搭建内弹道数学模型,分析随动系统在连射状态下的冲击载荷,并提出一种随动系统控制策略:位置环比例微分控制(PD)+转速环非奇异快速终端滑模控制(nonsingular fast terminal sliding mode control,NFTSMC)+基于改进型负载转矩观测器(load torque observer,LTOB)的电流比例前馈电流环控制相结合的复合控制。仿真结果验证了该控制策略能够增强随动系统抗冲击负载能力,提高系统稳定性。
1 连射状态下的冲击载荷分析
航炮装置在连续射击时,其受到的作用力主要是射击时膛内火药气体对膛底的等效合力以及膛内压力引起的后坐部分等效合力[10]。
1.1 内弹道数学建模
首先计算膛内弹丸在火药气体作用下所受合外力,根据内弹道基本方程组[11]:
(1)
式中:ψ为火药燃烧百分比;χ、λ、μ为火药形状特征量;Z为火药燃烧相对厚度;p为火药气体平均压力;Ik为火药燃烧速度系数;φ为次要功系数;m为火药质量;v为弹丸运动速度;S为炮膛横断面积;ω为装药质量;ρp为火药密度;α为余容;f为火药力;θ为绝热系数;l为弹丸位移。
根据以上方程组,考虑火药燃烧的2个时期,可以得到弹丸所受等效合外力:
第1时期:火药燃烧时期
(2)
第2时期:无火药燃烧时期
(3)
其中,
(4)
通过Matlab建立仿真模型,使用四阶龙格库塔函数求解中间变量及方程组,可以得到在膛内时期的弹丸平均膛压、弹丸速度、弹丸离开炮口时间等弹丸参数。
1.2 后坐部分载荷
航炮连续射击时,航炮后坐部分在炮膛合力及反后坐装置阻力等的共同作用下进行后坐运动。炮膛合力是膛内火药气体燃烧产生作用于身管内膛的火药气体压力,是使后坐部分产生后坐运动的主动力[12]。
根据火药气体作用性质的不同,可以把后坐机构的运动分为2个时期:弹丸在炮管内的运动时期和弹丸出炮口后的火药气体后效期[13]。那么,炮膛合力Fpt的表达式为:
(5)
式中:tg、tk为弹丸离开炮口时间、后效期结束时间;φ为次要功系数;ω为装药质量;m为弹丸质量;A为炮膛横断面积;p为炮膛平均压力;Fg为后效期开始时平均膛压;τ为后效期作用时间;b为后效作用系数。
航炮射击过程中,航炮缓冲装置能够有效减小后坐力,同时后坐部分向身管后方作减速运动[14-15]。根据航炮缓冲装置的结构特点和运动过程,建立缓冲装置动力学模型,主要假设如下:
1) 缓冲装置除环形弹簧外均按刚体处理。
2) 环形弹簧内部阻尼忽略不计。
3) 运动副间的间隙忽略不计。
4) 航炮质心位于身管轴线上。
5) 航炮内部机构运动过程对缓冲装置性能的影响忽略不计。
根据以上假设,航炮缓冲装置可看作一个弹簧—质量振动系统,因此其物理简化模型如下:
图1 航炮缓冲装置物理结构简图
以航炮质心O的起始位置为原点建立坐标系,规定力向后的方向为正方向,力向前为负方向;航炮射角向上的方向为正方向,射角向下为负方向;航炮后坐部分位移离开平衡位置向后为正方向,位移向前为负方向。那么,航炮后坐运动过程中,弹簧—质量振动系统的运动微分方程为:
(6)
其中,
(7)
式中:M为航炮后坐部分质量;x为航炮后坐部分位移;k1为外环形弹簧刚度;k2为内环形弹簧刚度;δ为环形弹簧圆锥角;ρ为环形弹簧摩擦角;Fpt为炮膛合力;Ff为机构摩擦力;F0为内外环弹簧预压力之和;Mhg为后坐机构重力;φ为航炮俯仰射角。
1.3 随动系统载荷
航炮随动系统由偏航电机、俯仰电机、传动装置、支撑件等组成,其结构简图如图2所示。
1.航炮偏航电机;2.偏航传动装置;3.航炮俯仰电机;4.俯仰传动装置;5.航炮炮架;6.航炮身管;7.航炮缓冲装置。
如图2,航炮射击过程中产生的后坐力通过缓冲装置、航炮炮架、支撑结构后传递给偏航、俯仰传动装置。
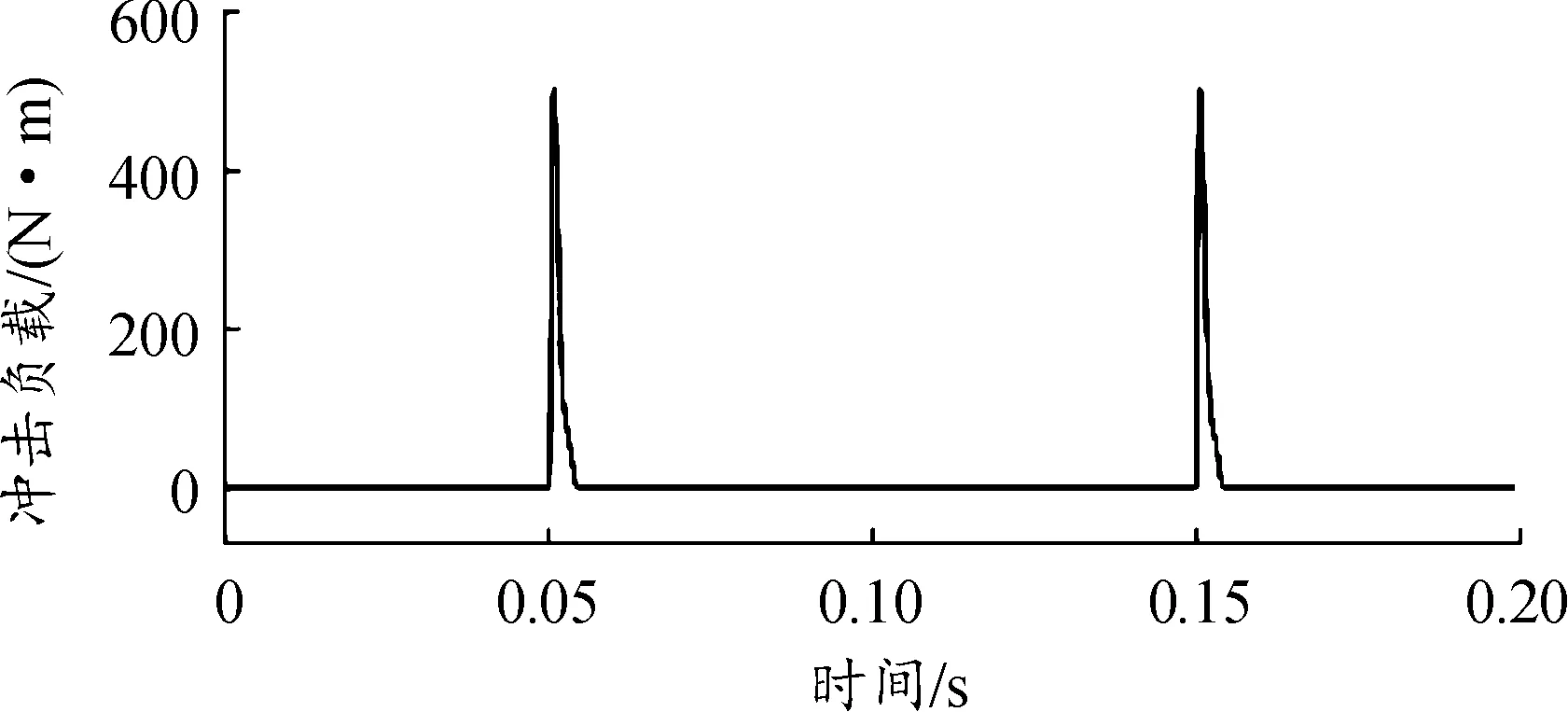
偏航传动装置所受转矩Mε通过减速器后作用于偏航电机,则偏航向电机所受冲击负载Tε为:
(8)
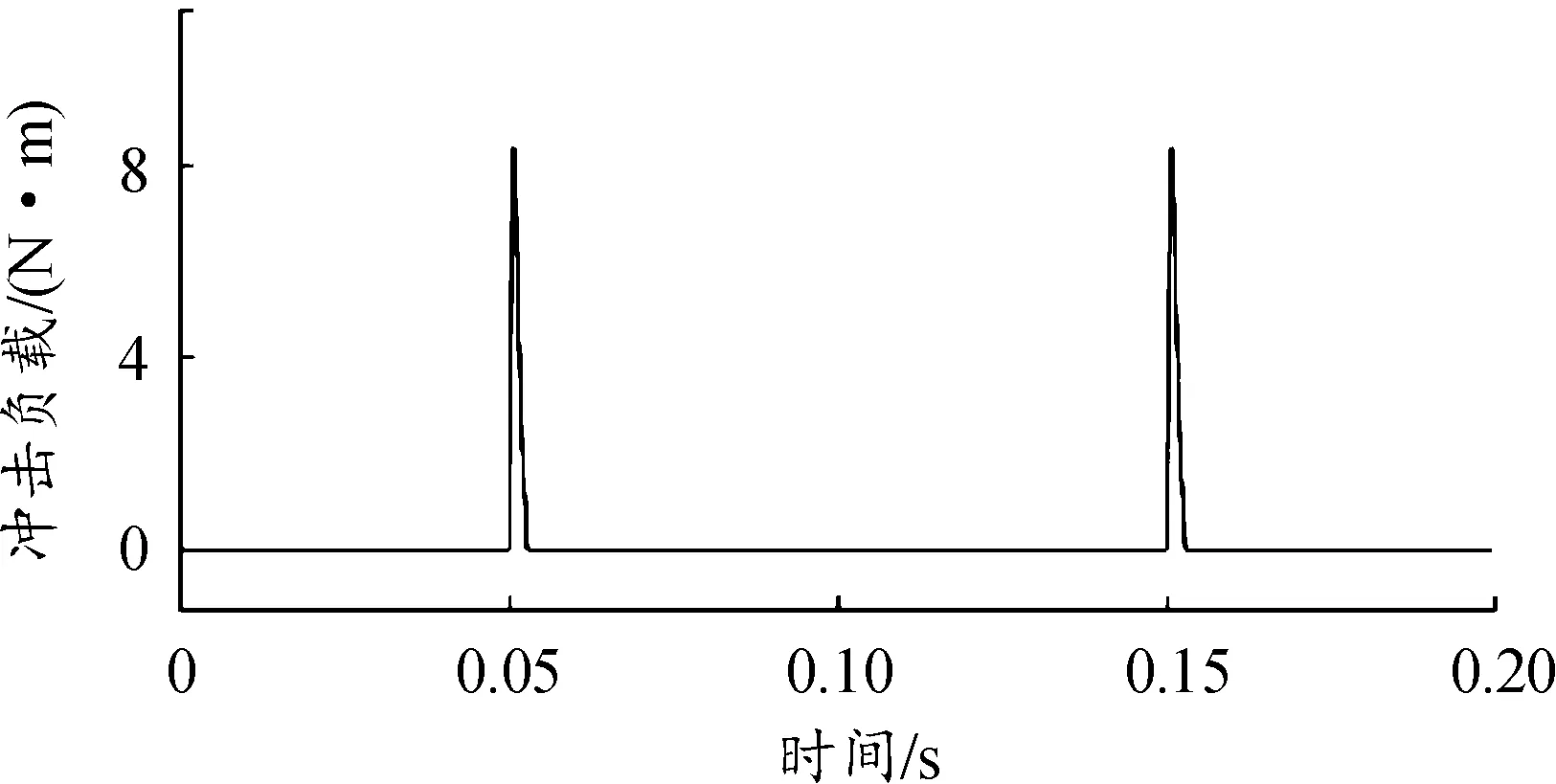
俯仰传动装置所受轴向力Fθ通过丝杠传递给俯仰向电机,则电机所受冲击负载Tθ为:
(9)
式中:ηε为偏航传动效率;iε为偏航传动比;l为俯仰丝杠传动导程;ηθ为俯仰传动效率;iθ为俯仰传动比。
航炮随动系统在连射过程中会受到高频冲击载荷,因此,随动系统的抗扰动能力和系统稳定性变得极为重要。
2 系统稳定控制策略设计
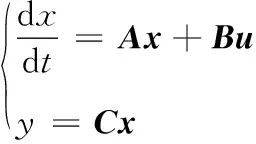
以航炮偏航随动系统为例,随动系统PMSM采用id= 0 控制策略,那么,PMSM的运动方程为:

(10)
其中:
(11)
TL=G·h+Tε
(12)
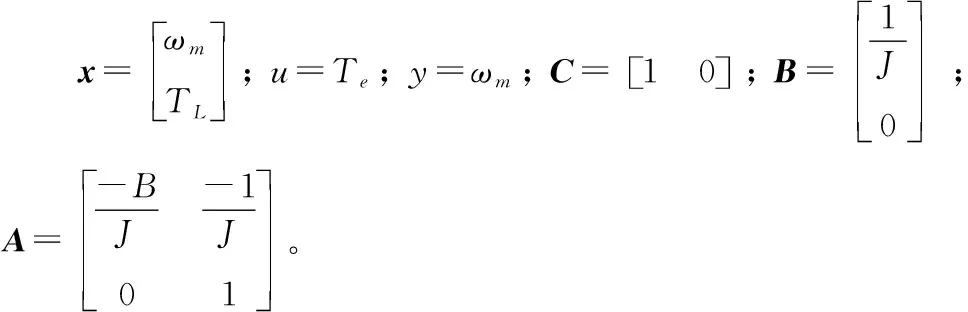
式中:Te为PMSM的电磁转矩;TL为电机负载转矩;G为航炮机构总重力;h为航炮机构重心到偏航电机轴距离;Tε为电机所受冲击负载;ωm为电机的机械角速度;J为系统的转动惯量;B为粘性摩擦系数;Pn为电机磁极对数;ψ为永磁体与定子交链磁链;iq为q轴上的电流分量。
2.1 改进型负载转矩观测器
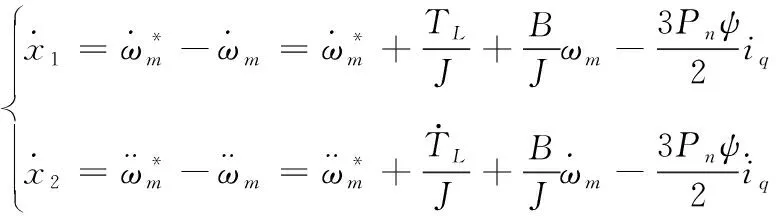
选取PMSM机械角速度与负载转矩变化作为状态变量,假设航炮机构重力引起的负载为常量且远小于后坐冲击负载,因此偏航电机负载转矩TL变化仅考虑冲击负载Tε的影响。那么,电机转速负载系统状态方程为:
(13)
在航炮随动系统中,需要快速地在线辨识负载转矩,因此引入电机实际与给定转速差的微分值,能够提高对负载转矩的观测收敛速度。那么,该负载转矩观测器系统状态方程为:
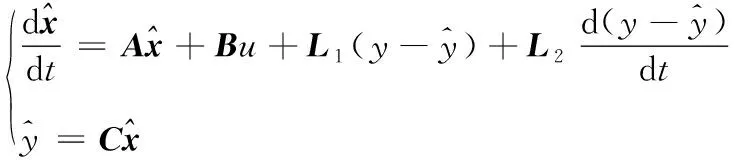
(14)
(15)
(16)
若特征方程理想极点为α、β,且忽略粘性摩擦系数B,l1=0,l2=0,则反馈系数:
(17)
综上,改进型负载转矩观测器的表达式为:
(18)
那么,该改进型负载转矩观测器的结构如图3所示。
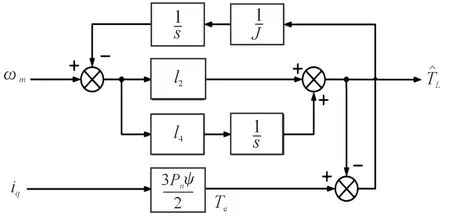
图3 改进型负载转矩观测器结构图
2.2 非奇异快速终端滑模速度控制器
为了提高随动系统的抗干扰能力和控制精度,电机转速环选用非奇异快速终端滑模控制(NFTSMC)代替传统PID控制,此时PMSM系统状态变量为:

(19)

(20)
因此,在本文中选取的NFTSMC滑模面为:

(21)
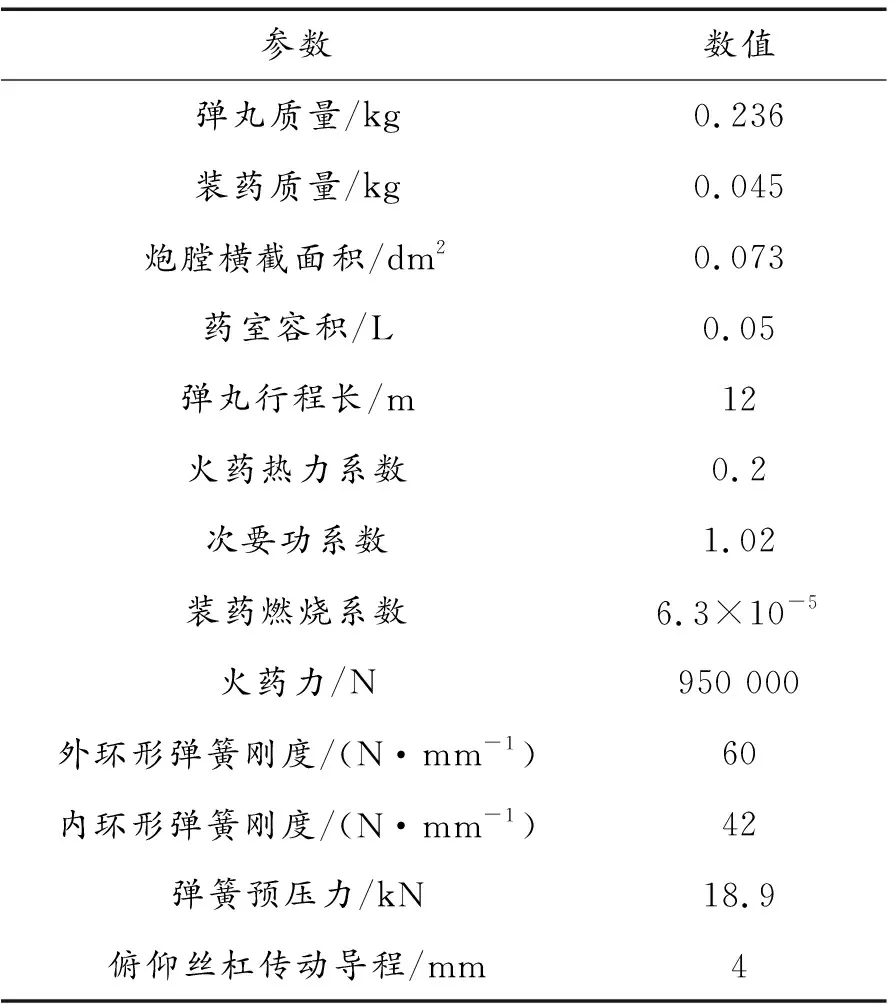
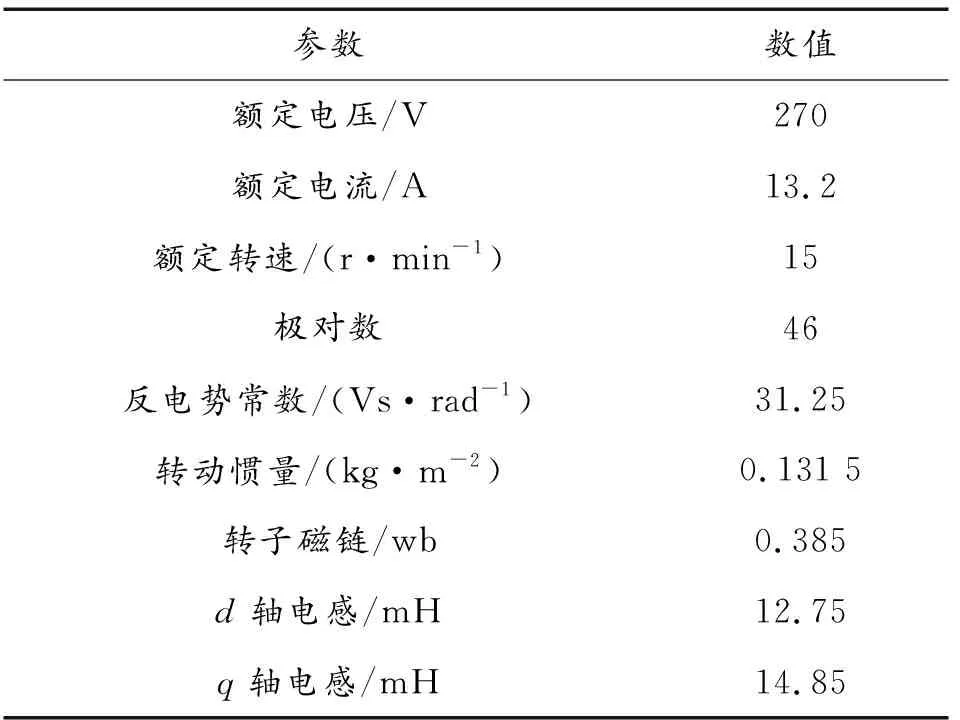
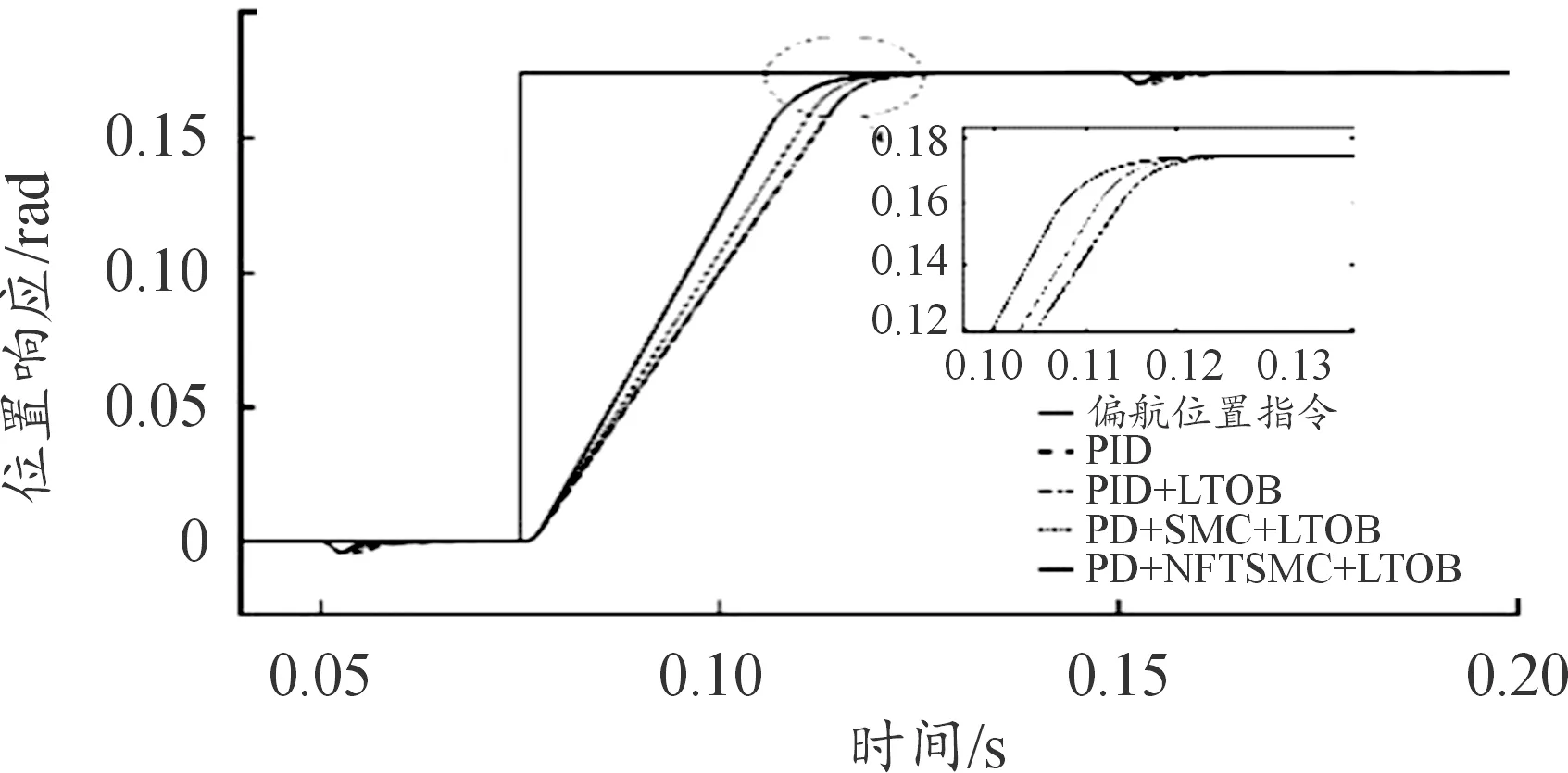
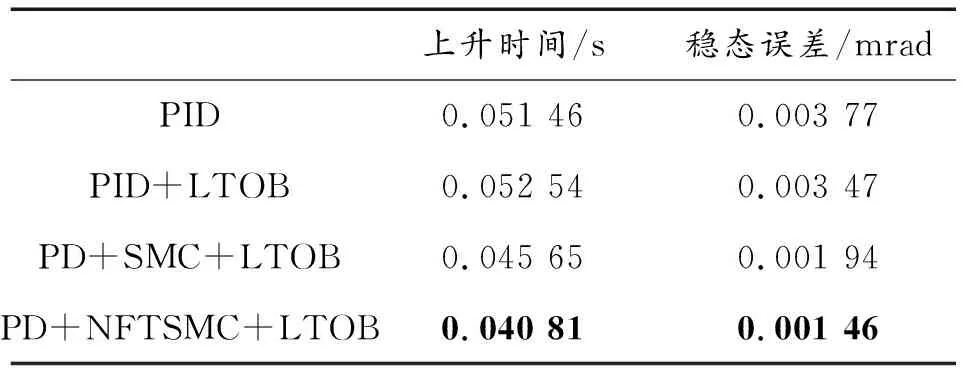
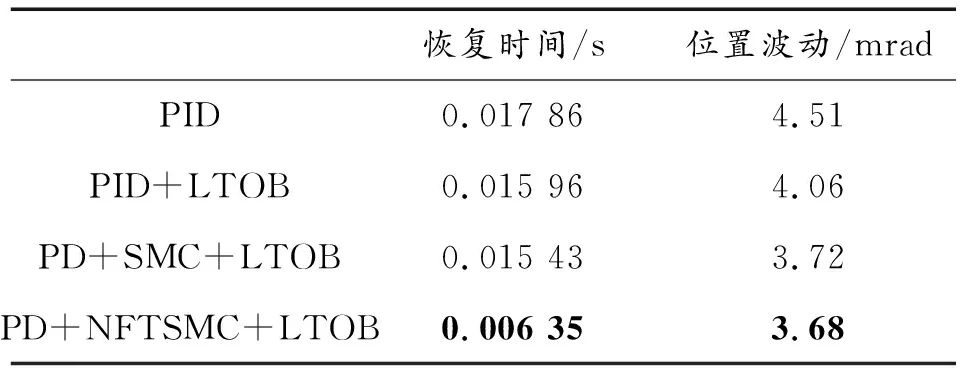
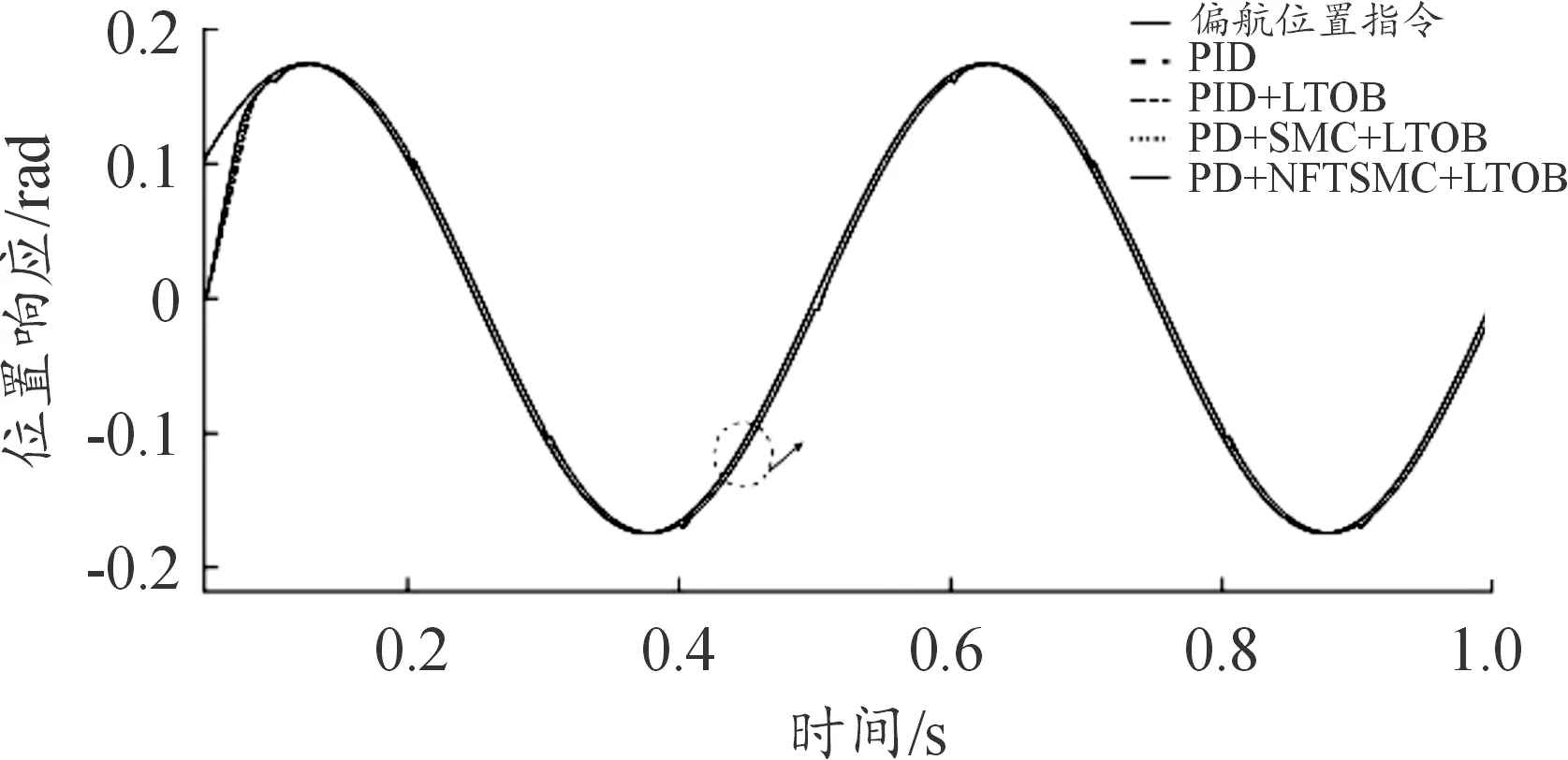
式中:α>0;m,n,g,h均为正奇数,并且1 (22) 为减弱滑模抖振,在本文中采用终端吸收子设计趋近率: 12月1日上午,中铁二十局五公司“长安七号”盾构机从昆明轨道交通五号线河尾村站右线成功始发,标志着该项目正式进入区间掘进施工阶段。该标段主要工程为怡心桥站、广福路站,盾构区间全长3058.8米。 (23) 那么,转速环NFTSMC控制器输出为: (24) 选取Lyapunov函数为V=1/2s2,根据式( )、式( )可知: (25) 因此,系统误差能够在有限时间内收敛,在本文中设计的转速环NFTSMC控制器稳定。 根据上文提出的控制策略,偏航随动系统控制策略框如图4所示。 图4 偏航随动系统控制策略框图 以某30 mm航炮部分内弹道参数和后坐装置参数为输入参数,验证上文搭建的载荷仿真模型,其相关参数如表1所示。 表1 某30 mm航炮部分参数 根据表中参数及航炮机构安装尺寸参数,可知航炮随动系统偏航、俯仰电机所受冲击负载Tε、Tθ。假设航炮射速600发/min,随动系统偏航、俯仰电机连射状态下所受冲击负载如图5、图6所示。 图5 偏航电机冲击负载Tε 图6 俯仰电机冲击负载Tθ 为验证本文中提出的改进型负载转矩观测器与非奇异快速终端滑模控制器的可行性,选取航炮偏航向电机为研究对象,搭建偏航向随动控制系统。同时,对传统PID(PID)、PID+负载观测器(PID+LTOB)、比例微分控制+传统滑模控制+负载观测器(PD+SMC+LTOB)及本文中设计的位置环比例微分控制+转速环非奇异快速终端滑模控制+电流环负载转矩观测器(PD+NFTSMC+LTOB)进行仿真验证对比。 表2 偏航向电机部分参数 根据阶跃响应曲线图7对比及阶跃响应对比表3,可知,PD+NFTSMC+LTOB控制策略响应位置阶跃指令的上升时间为0.040 81 s,稳态误差值为0.001 46 mrad。相比于传统三环PID、 PID+LTOB、PD+SMC+LTOB控制方法,本文中设计的PD+NFTSMC+LTOB控制方法能够使航炮随动系统在无超调的情况下,更快速更准确响应火控调转指令。 图7 阶跃响应曲线对比 表3 阶跃响应对比 图8是传统的负载转矩观测器与改进后的负载转矩观测器的负载观测值对比图。从图中可知,与传统负载转矩观测器相比,改进型负载转矩观测器加入了转速误差微分量,能够快速有效地辨识负载转矩的变化状况,因此改进型观测器对冲击负载的观测速度更快、观测精度也更高。 图8 负载观测值对比 从图9和表4可知,传统PID控制方法受到连射后坐冲击负载时,位置波动接近4.51 mrad,相比而言,其他3种控制方法将负载转矩观测器的观测值作为电流比例前馈补偿,使随动系统能够更好的抑制航炮冲击负载的影响,具有更强的抗扰动能力。针对传统滑膜受到连射负载时会出现的抖振问题,本文中设计的PD+NFTSMC+LTOB控制方法能够更快速的恢复到稳态,更好的抑制滑膜抖振,从仿真结果可知受到连射负载时只需0.006 35 s左右就能回到给定位置,调整速度更快。 图9 抗扰动曲线对比 表4 负载抗扰对比 从正弦响应曲线对比图10可知,4种控制方法均能实现位置正弦指令跟踪。根据抗扰动曲线对比图11,可以看到正弦跟踪过程抵抗连发射击冲击负载时的位置波动情况,传统PID的位置波动较大,而引入了改进型负载转矩观测器的其他3种控制放大均具有较好的抗扰动能力。同时,本文中提出的PD+NFTSMC+TOB控制方法位置在具有高跟踪精度的同时,具有更强的抗扰动能力,保证航炮随动系统在持续射击移动目标过程中能够稳定射击线。 图10 正弦响应曲线对比 图11 抗扰动曲线对比 本文中通过建立航炮内弹道和后坐载荷模型,分析航炮随动系统连射状态下的冲击负载,在位置环比例微分控制器的基础上,提出一种基于电流环负载转矩观测器前馈补偿与转速环非奇异快速终端滑模控制器相结合的航炮随动系统。改进后的负载转矩观测器通过加入转速微分量,对电流环进行前馈比例补偿,提高对冲击负载的观测速度和跟踪精度,相比于传统地滑膜控制,非奇异快速终端滑模控制能够解决奇异问题,提高随动系统的抗扰动能力,增强系统的稳定性,且具有较强的鲁棒性。通过仿真实验验证本文中提出的某连射航炮随动系统稳定控制策略具有较高的动态响应速度和控制精度,较强的抗扰动能力,保证航炮随动系统在连射状态下的稳定跟踪性能。对于进一步提高机载航炮性能具有积极意义。
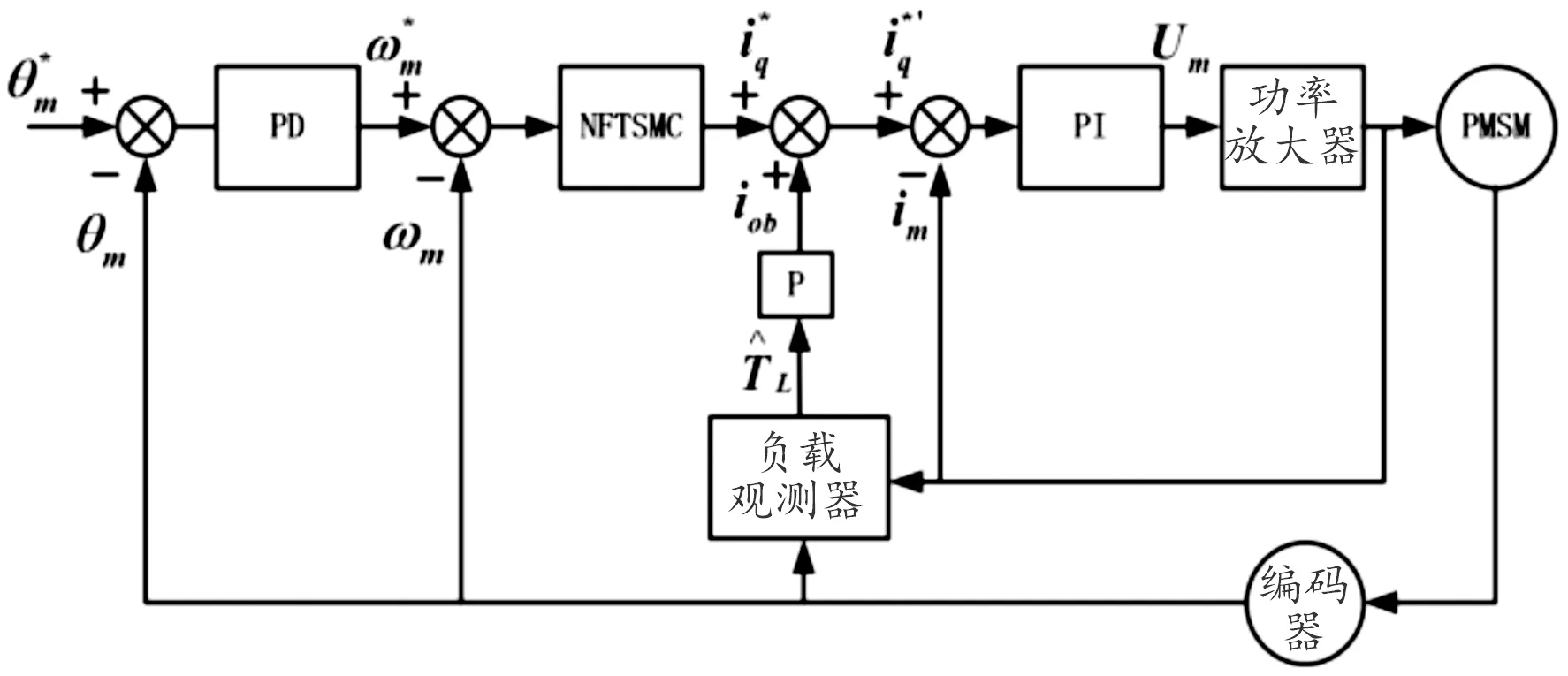
2.3 随动系统控制框架
3 仿真验证
3.1 冲击负载仿真验证
3.2 随动系统仿真验证



4 结论
