锂离子电池剩余使用寿命预测综述
2023-05-31万广伟廖微张强
万广伟,廖微,张强
1.山东大学能源与动力工程学院,山东济南 250061;2.军事新能源技术研究所,北京 102399
0 引言
近年来,交通电气化在世界范围内迅速发展,这有助于减少温室气体排放,缓解全球变暖。锂离子电池(lithium-ion battery,LIB)作为主要的储能装置,是电动交通系统的关键部件之一[1]。锂离子电池作为一种应用广泛的电能存储技术,具有能量密度高、功率性能好、自放电率低、循环寿命长、环境友好等显著优点[2],已被广泛应用于交通运输、国防军事、医疗等领域[3]。
然而,由于锂离子电池的电化学性质在运行过程中会发生副反应,致使电池材料老化和容量衰减,这可能导致系统运行异常,甚至电气系统发生灾难性事件。电池的性能在其工作寿命期间会下降,一旦其可用容量降至额定容量的80%或内阻增加至初始值的两倍时,电池将达到寿命终止(end of life,EOL)。因此,预测锂离子电池的剩余使用寿命(remaining useful life,RUL)对于电力系统来说至关重要。RUL定义为EOL和当前周期之间的间隔[4],准确的RUL预测可以有效地指示锂离子电池的健康状况,同时可确保系统的可靠性和安全性。为此,本文针对近期国内外对锂离子电池剩余使用寿命预测的研究进行了总结和概述,为相关技术人员提供参考。
1 RUL预测方法分类与发展概述
RUL预测方法主要包括基于经验和基于性能的方法[5]。RUL预测方法分类如图1所示。
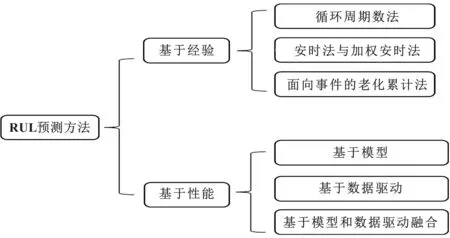
图1 RUL预测方法分类
1.1 基于经验的RUL预测方法
基于经验的方法是根据电池使用过程中的经验知识来预测电池剩余使用寿命的一种统计方法,主要包括循环周期数法、安时法与加权安时法以及面向事件的老化累计法等[6]。
安时法是通过记录电池的放电量,利用电池的实际容量减去其放电量来计算电池的剩余电量。由于在不同工况下电池放电对电池的影响存在差异,因此对不同的工况设置相应的权重,这便是加权安时法。该方法以放电权重乘以放电安时数作为总安时数,以总安时数来估计剩余电量。
循环周期数法是通过对电池的循环周期进行计数,当电池的循环周期次数等于失效阈值时,认为电池达到使用寿命。该方法需要考虑不同循环条件和循环状态等因素对循环寿命的影响,并根据经验和标准参数两者共同确定电池寿命。
面向事件的老化累计法是通过设定引起电池寿命损伤的事件,并根据这些事件对电池寿命的损伤情况设定相应的权重,计算这些事件数再乘以权重得到损伤值,当损伤值超过失效阈值时,认为电池达到使用寿命。
基于经验的RUL预测方法简单且计算较快,但其对传感器等测量设备要求较高,脱离试验室环境后难以应用到实际当中。目前,RUL预测的主流方向还是基于性能的方法。
1.2 基于性能的RUL预测方法
1.2.1 基于模型的方法
基于模型的方法通常基于机械故障机制建立物理模型,或基于经验知识和实时测量建立统计模型,以描述LIB的降解过程。需要深入理解模型的组成,其中数学表达式用于描述复杂的电化学过程。其对历史数据的依赖性较小,即使没有太多样本数据也可以进行预测研究,常用的模型包括电化学模型、等效电路模型和经验模型。
电化学模型由3个过程组成,分别是传质、传导和电化学反应。主要通过分析锂离子电池的电化学性质来建立退化模型,从而实现RUL预测。
等效电路模型通过电池电压、电流、电阻、电容等电路元件模拟电池内部化学能转化为电能的过程,通过其变化规律来表示电池的外部特性。
经验模型是关于系统参数和系统变量的数学模型,是符合系统参数和变量统计分析规律的经验函数。经验模型需要较少的电池物理或电化学信息。它们通常基于电池退化数据的回归分析建立。经验模型是在循环过程中通过测量或估计使参数不断更新来拟合模型,例如线性、指数和多项式模型 。大多数贝叶斯滤波方法,包括卡尔曼滤波(kalman filter,KF)、扩展卡尔曼滤波(extended kalman filter,EKF)、无迹卡尔曼滤波(unscented kalman filter,UKF)、粒子滤波(particle filter,PF)、无迹粒子滤波(unscented particle filter,UPF)等方法,均可在循环期间用新的运行数据更新模型参数[7]。
国内外很多学者对基于模型的方法进行了研究,并提出了很多模型,例如Li等[8]用(pseudo-two-dimensional model,P2D)伪二维模型描述了LIB在运行期间的复杂电化学响应,提出了一种基于电化学模型的利用自适应无迹卡尔曼滤波器(adaptive unscented kalman filter,AUKF)的状态观测器,用于LIB的状态估计。Wang等[9]在KF和PF的帮助下,对不同放电率和温度下的电池预测进行了研究,用于预测RUL。Guha等[10]提出了一种基于内阻增长模型的预测方法,该方法采用PF将电池的内阻增长作为老化参数。Zhang等[11]提出了一种用于电池RUL预测的UPF方法,使用无迹粒子滤波器(UPF)预测了电池RUL,获得了无迹卡尔曼滤波器(UKF)为粒子采样提供的建议分布。
需要特殊说明的是,在很多研究中,将基于PF和KF一类的预测方法归类于基于数据驱动方法体系中。
1.2.2 基于数据驱动的方法
基于数据驱动的方法是指不考虑复杂的电池内部电化学机制,从已测得的锂离子电池相关数据特征(容量、内阻、电压、电流和温度等)中,通过参数的变化,寻找检测数据与行为模式的规律和相关信息,并利用机器学习方法构造退化数据与健康状态之间的状态映射关系,从而进行锂电池RUL预测。
数据驱动的RUL预测方法已被广泛研究,并具有许多优点,如无模型、高精度和强鲁棒性。与需要特定模型表达式的基于模型的方法不同,数据驱动方法使用机器学习或深度学习技术来进行锂离子电池RUL预测。数据驱动的RUL预测通常包括数据采集、数据预处理、模型训练和预测。
目前已经有很多机器学习方法用于RUL预测,主要包括人工神经网络(artificial neural networks,ANN)、支持向量机(support vector machine,SVM)、相关向量机(relevance vector machine,RVM)、差分自回归滑动平均模型(autoregressive integrated moving average,ARIMA)、自回归模型(autoregressive,AR)、高斯过程回归(gaussian process regression,GPR)等方法。
(1)人工神经网络。人工神经网络是一种典型的基于非线性方法的运算模型。人工神经网络一般可分为两类:①浅层人工神经网络,如反向传播(back propagation,BP)ANN和非线性自回归(nonlinear autoregressive,NAR)ANN;②深层人工神经网络,如长短时记忆(long short-term memory,LSTM)人工神经网络。Khumprom等[12]利用深度神经网络(deep neural networks,DNN)预测锂离子电池SOH和RUL,具有良好的预测精度。Chinomona等[13]使用递归神经网络-长短时记忆(recurrent neural network-long short-term memory,RNN-LSTM)确定电池剩余使用寿命(RUL),该方法显示了出色的RUL预测结果。
(2)支持向量机。支持向量机是一种按照有监督学习方式对数据进行处理的方法,如果一个数据集具备小样本、非线性等特点,通常使用SVM都能取得较好的预测效果。SVM最初被用于解决分类问题,而Drucker等[14]提出用于解决回归类问题的支持向量回归机(support vector regression,SVR)。SVR 通过正则化项以优化结构风险,取得总体最优解,克服ANN方法存在易收敛于局部最优问题。Patil等[15]提出了一种多节点支持向量机(SVM)方法,该方法将经典模型和回归模型相结合,以提高效率,并在不同工况下获得足够的预测精度。
(3)相关向量机。相关向量机是一种采用概率学习与支持向量机类似的用于回归和分类问题的贝叶斯稀疏核方法。相关向量机具有不确定表达的能力,是非线性概率回归中的现有技术,计算速度非常快,但是长期预测精度较低。Zhang等[16]利用差分进化(differential evolution,DE)算法改进的相关向量机(RVM)估计电池RUL。通过对5号电池容量预测和18号电池容量预测的试验,验证了该方法能够准确预测电池容量轨迹的变化趋势,准确估计电池RUL。
(4)差分自回归滑动平均模型。ARIMA是一种有效的时间序列预测处理方法,可用于计算电池RUL及其置信区间。其根据锂离子电池的历史使用数据和当前数据为样本,来预测剩余使用寿命,预测样本越多,预测精度越高。Zhou等[17]提出了一种结合经验模式分解和ARIMA的RUL预测方法。此方法具有良好的RUL预测性能,但使用 ARIMA 的预测结果缺乏允许计算置信区间的概率密度函数 (probability density function,PDF)。
(5)自回归模型。AR 模型是一种线性预测,本质类似于插值,目的都是为了增加有效数据,在时间序列预测中的应用十分广泛。但AR 模型训练时间较长,不适合单独进行预测,常与其他预测方法相结合。Ma等[18]采用自回归(AR)模型和PF算法进行RUL预测,利用AR模型预测的容量更新PF算法的退化模型参数,并通过NASA锂电池数据集验证了该方法的有效性。
(6)高斯过程回归。高斯过程回归是一种灵活的非参数模型,它能够实现任意线性或者非线性系统动态行为特征的建模预测,并且可以结合状态预测先验知识,实现基于贝叶斯框架下的状态预测[6]。Liu等[19]提出了将间接健康指标(health indicators,HIs)和多GPR模型结合起来,基于可测量的电池退化特征来实现锂离子电池RUL预测。该方法通过两个不同的生命周期测试数据集进行了验证。结果表明,该方法可以实现锂离子电池RUL的准确且可靠预测。
1.2.3 基于模型和数据驱动融合的方法
融合方法克服了基于模型和基于数据驱动预测的局限性,可以充分发挥模型和数据驱动两种方法的优点,越来越多的研究人员青睐于用融合方法来预测电池剩余使用寿命,以提高预测的准确性。Wu等[3]通过引入神经网络(neural network,NN)模型来描述电池退化趋势,并使用基于bat的粒子滤波器进行参数更新来进行锂离子电池RUL预测。Chang等[20]提出了一种基于误差修正思想的融合方法,包括无迹卡尔曼滤波、完全经验模态分解和相关向量机。其基本思想是首先利用UKF对RUL和误差进行预测。预测误差用完全经验模态分解,然后得到重构后的误差序列。最后利用RVM从误差序列中学习得到预测的新误差,并反馈给UKF进行校正。
综上,融合型方法在 RUL 预测中效果表现良好,且可以结合各个算法优势,运用得当是一种极为实用的估计方法,但如何通过多种方法的结合扬长避短仍然是一个难以解决的问题[21]。
1.2.4 基于性能的RUL预测方法对比分析
基于模型和基于数据驱动都有不同的需求和用例,也都有不同的优点和缺点。
(1)基于模型的方法建立物理模型或统计模型,并通过表示模型的数学公式来描述电池退化趋势,对历史数据的依赖性较小,即使没有太多样本数据也可以进行预测研究,具有更高的精度,因为模型基于实际(或接近实际)的物理系统,该模型代表了一个真实的系统,可以更真实地观察和判断。缺点是该模型非常复杂,需要大量计算时间或者资源,这可能不太适合应用在实际当中,建模也具有局限性,尤其是在具有不可测量变量的大型复杂系统的情况下局限性更加明显。
(2)基于数据驱动的方法需要大量历史样本数据,并使用统计和机器学习技术从性能数据(如电流、电压、时间和阻抗)中提取特征,以估计电池的RUL。此方法不需要复杂的模型,更容易应用到实际中。但为了建立一个高精度的模型,需要大量的历史数据以及更多的努力来理解基于收集数据的真实系统行为。
(3)融合型方法是目前RUL预测研究的热点,可充分发挥模型和数据两种方法的优点,但在模型融合数据等方面还存在较大的挑战。
2 结束语
准确预测锂离子电池的剩余使用寿命,有利于监测电池性能,从而提高安全性。目前主流的锂离子电池剩余使用寿命的预测方法主要是基于性能的方法即基于模型、数据驱动以及上述两种融合的方法。近些年来,研究人员在锂离子电池预测方面已经取得了较大的进展,但依旧存在很多挑战。基于模型和数据驱动融合的技术越来越得到研究人员的青睐,而如何解决模型与数据的匹配融合是其中的一大难点,相信在未来研究中,人们可以更好地处理这个问题,从而实现更加准确的RUL预测。