创意机器人创新实践教育活动
2023-05-30许玉球傅泽禄吴志庆侯的平韩俊
许玉球 傅泽禄 吴志庆 侯的平 韩俊

教学分析
学情分析
通过动手实践,能够引导、促进学生科学思维的形成。声控四足机器人具有上手容易、知识丰富、拓展性强的特点,将其应用于科学教育,让学生经历动手制作—测试调试—外观设计—功能拓展的实践过程,就是引导学生基于已有套件,进行创新创造的过程。
教学目标
知识与技能了解四足动物步态运动规律,认识多种螺丝螺母结构,了解声音传感器工作原理,了解直流马达、三极管等电子元器件及其工作原理,掌握简单的机械结构、电路搭建技能,激发艺术创作思维,培养拓展思维能力。
过程与方法学生接受任务—在实施过程中发现问题并解决—引导学生提出外观设计设想—进行外观设计创作—引导学生提出拓展创新设想—进行功能创作—分享交流。
课程导入
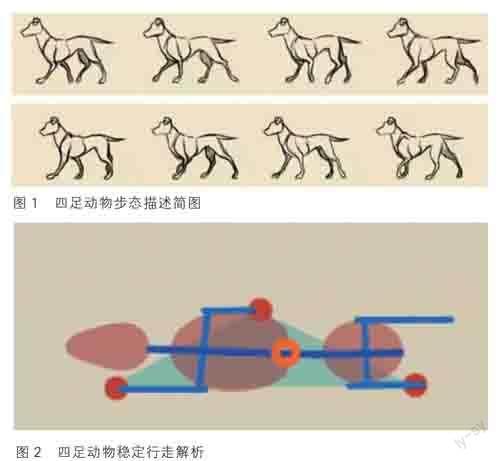
四足动物在生活中十分常见,狗、猫、牛……大家似乎对四足动物很了解,但它们的步态、行走姿势是什么样的,似乎又很陌生。通过四足动物的步态动图、视频等(图1)与学生互动,引起学生对动物步态的研究兴趣。
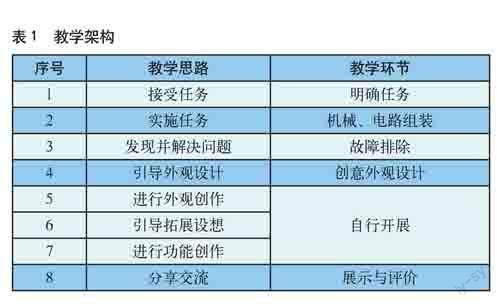
四足动物行走过程中时刻保持三足着地,动物的重心(如图2中的小圆圈)时刻保持落在三足着地点形成的大三角平面内,保持平衡稳定。
提出任务
教学架构见表1。四足动物步态虽复杂但有规律可循,声控四足机器人就是模拟四足动物设计出的机器人。本案例组织学生以小组为单位,合力制作声控四足机器人,设计制作创意外观并进行拓展。
动手制作
声控四足机器人机械组装及电路搭建具有一定的灵活性,学生通过观看专业拍摄制作的教学视频完成制作(扫描图3的二维码,可以观看如下各个阶段的教学视频),较为适合零基础学生学习。
机械组装
观看“会走的机器人——机械组装”部分视频。通过完成机械组装部分,取得阶段性成果,吸引学生进入下一步骤。该部分视频含3项内容。①认一认:机械零件。动手前先认识机械零件。②动动手:组装步骤。组装机器人的机械部分。③跑起来:机械测试。检验组装成果。
认识电子元器件
观看“认识电子元器件”部分视频,该部分视频含3项内容。①机器人的耳朵。声控四足机器人,顾名思义具有声控功能,人类耳朵可以听到声音,机器人通过什么接收声音呢?②机器人的手脚。人类手脚可以运动,机器人靠什么运动呢?③机器人的大脑。人类大脑可以思考,机器人工作也要“思考”,机器人“大脑”的控制原理是怎样的呢?
电路连接
观看“听话的机器人——电路连接”部分视频。声控四足机器人“听”到声音才会走,走一会儿会停下来,有声音的继续“催促”,才会再次走起来,该部分视频含4项内容。①看一看:电路原理图。学会看电路图,认识电路图中的符号代表哪些元器件。②认一认:还有哪些元器件。学习声控四足机器人电路的必要组成元器件,比如二极管。③动动手:电路连接。利用“节点法”搭建电路。④比一比:看谁的机器人更听话。通电测试前检查一遍电路,无误后再通电。
故障排除
觀看“听话的机器人——排除故障”部分视频。机器人制作完成后没有达到预期效果是正常的,科学研究中也是如此,做好问题排查。
外观设计及功能拓展
外观设计
外观创意设计能增强学生决策、模仿、想象等能力,更好地表达内心世界,旨在培养和激发学生的设计思维,而不是设计出一个可以使用的产品。因此,设计的主题、选材不受限制,可从仿生、人文、科技应用等主题着手,优先推荐使用环保的、常见的材料,比如彩色卡纸、透明塑料纸、轻黏土、轻木板等。外形、制作方法也同样不受限制,可以使用常见工具,3D打印机、激光切割机等,以现实生活中的四足动物为原型,甚至可以是科学创想创造的形象。学生创意作品如图4所示。
功能拓展
通过已掌握的知识,可增加元器件为机器人设计新的功能,也可对其结构进行改进。设计新增的功能和改进可以在真正意义上成功实现,也可以只是象征性地展现,这一过程可让学生参与到机器人的设计和改进过程中,感受发明创造的意义。
展示与评价
完成机器人制作后,可以制作简单的直行赛道,组织学生进行机器人行走速度比拼,并记录每组机器人的行走速度,最终完成声控四足机器人展示评价表,对本项目作品进行最终评价。
