机器人辅助穿刺较徒手穿刺在脊柱内镜手术治疗中的优势分析
2023-05-29耿保伟杨华东张西峰
耿保伟,杨华东,张西峰*
(1.北京清华长庚医院外科部,北京 102218;2.北京清华长庚医院骨科,北京 102218)
腰椎间盘突出症(lumbar disc herniation,LDH)[1]是指腰部的椎间盘在外力和劳损的作用下,发生了纤维环破裂、髓核突出、压迫神经根而出现腰痛、坐骨神经痛、肌肉麻木无力为主要表现的临床综合征。导致椎间盘突出的相关因素较多,有积累劳损、遗传因素、吸烟、妊娠、年龄因素、糖尿病等。其中,椎间盘退行性改变被列为首要因素[2]。本病多发于中青年,男性多于女性,对患者生活质量及工作能力影响很大,如不经适当治疗可发展为腰椎管狭窄和腰椎滑脱,严重者造成截瘫。本病还易与其他导致腰痛及腿痛的疾病相混淆导致病情延误。传统的开放手术存在创伤大、术后并发症多、恢复慢等情况,不容易被患者接受[3-6]。近些年,随着人们对疾病认识的不断加深和微创外科治疗理念的普及,脊柱内镜技术治疗腰椎间盘突出症已经成为微创脊柱外科的主流手术[7-8]。同时,随着人工智能在医学领域的不断拓展,数字化医疗时代的到来[9-11],智能机器人在脊柱外科领域的应用随之兴起。本研究旨在分析经皮机器人辅助穿刺定位较徒手穿刺定位在脊柱内镜术治疗中的优势,现报告如下。
1 资料与方法
1.1 一般资料 纳入标准:(1)L4~5单节段的LDH;(2)腰椎MRI、CT平扫相关影像检查支持LDH诊断;(3)经6~12周保守治疗,症状缓解不佳者;(4)既往无腰椎责任节段手术史;(5)麻醉方式均为局麻加强化。排除标准:(1)合并严重腰椎管狭窄、腰椎Ⅱ度以上滑脱;(2)严重的骨质疏松,出现腰椎不稳;(3)合并腰椎骨折、肿瘤及手术区域活动性感染;(4)合并全身其他疾病难以耐受手术;(5)合并严重精神心理疾病而依从性差。本研究经医院伦理委员会批准,所有患者均签署手术相关知情同意书。
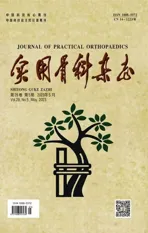
北京清华长庚医院2022年3月至2022年6月行经皮椎间孔镜下腰椎间盘髓核摘除术的患者62例。随机分为两组,30例患者选择机器人辅助下穿刺定位(机器人组),其中男21例,女9例;年龄19~72岁,平均(45.2±16.7)岁。32例选择经皮徒手穿刺定位(常规组),其中男17例,女15例;年龄23~68岁,平均(47.6±19.5)岁。两组患者术前年龄、性别、身体质量指数(body mass index,BMI)等一般资料对比,差异无统计学意义(P>0.05,见表1)。
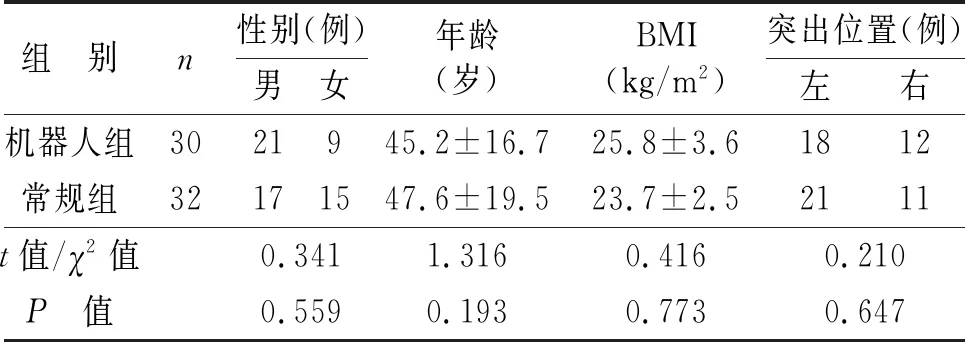
表1 两组患者术前一般临床资料比较
“天玑”机器人系统可用于行脊柱、创伤等手术。包括机器臂主机、光学跟踪系统、主控制台三部分(见图1),分别类似于医生的手、眼、脑。在术中,光学跟踪系统可实时监控每一个手术环节;启动机械臂深入目标区域实施治疗,精度可达亚毫米;主控台负责“路径规划”。“天玑”工作时,通过3D C型臂扫描获取三维影像而进行三维空间定位,再将扫描数据传输到导航系统工作站,在计算机控制台负责计算出穿刺位置、方向和距离,启动机械臂,即能按规划进行定位。

图1 “天玑”机器人系统
1.2 方法
1.2.1 手术方式 两组患者采取相同的体位、麻醉下手术,由经验丰富的同一医师进行手术。
机器人组手术路线如下:使用可折叠手术台,将3D C型臂与机器人系统相连,经测试无误,开始手术。取俯卧屈髋屈膝位。常规消毒、铺巾,于体表合适位置(均选在L3棘突)安装mark,C型臂正侧位透视定位目标间盘区域,通过扫描获取三维影像图。然后于主控制台显示器规划穿刺靶点(简式技术法,X线正位片上为上、下关节突内缘连线处),启动指挥系统操控臂。取1%罗哌卡因10 mL、2%利多卡因20 mL、0.9%生理盐水30 mL按照1︰2︰3的比例配置麻醉药物,总量约60 mL,沿规划角度于目标点对应部位皮肤、皮下全层浸润麻醉,至关节突关节。插入导针,依次置入扩张杆、套筒,连接内镜,调试最佳视野,连接3 L生理盐水及射频。清理软组织,安放半齿型套管及镜下环锯,行扩大椎间孔成形,电凝止血,至硬膜囊、后纵韧带、椎间盘组织清晰可见,“旋切法”摘除突出物,清理探查无误后,退出工作通道。于皮肤、皮下组织全层缝合1针,术毕。
常规组方法:采用经皮徒手穿刺定位,于术前腰椎MRI或CT像的合适病变层面计算出穿刺距离和穿刺角度。开始手术,通过C型臂透视确认目标间隙,以记号笔标记。再反复透视至理想位置,使用18G穿刺针穿刺,置入导丝。建立操作通道,连接3 L生理盐水,采用同上手术方法。
1.2.2 术后处理 患者均顺利完成手术,无神经损伤、椎间隙感染、下肢深静脉血栓等不良情况发生,常规组患者1例出现皮肤浅表愈合不良,经延长药物治疗数日后愈合,1例穿刺时出现硬膜损伤,术中予以流体明胶封堵后,观察漏口愈合。术后1~3 d常规予以药物止痛、消肿、营养神经治疗。术后均按计划康复锻炼,1 d开始练习直腿抬高,3 d练习腰背肌力量(如拱桥、三点支撑、五点支撑、小飞燕练习),术后1 d佩戴腰围即开始下地日常行走练习。
1.3 随访和观察指标 患者均获3~6个月随访,平均随访时间(4.6±2.1)个月。观察并记录两组患者术中透视次数、出血量、手术时间及术前、术后1 d、1周、1个月、3个月的疼痛视觉模拟评分(visual analogue scale,VAS)、Oswestry功能障碍指数(oswestry disability index,ODI)、日本骨科协会(Japanese orthopaedic association,JOA)评分。

2 结 果
机器人组患者术中透视次数、手术时间、出血时间均少于常规组,两者比较差异有统计学意义(P<0.01,见表2)。

表2 两组患者术中指标比较
术后1 d、1周、1个月时、3个月时,两组患者VAS评分、ODI评分、JOA评分均较术前改善,差异有统计学意义(P<0.001)。两组患者术前及术后1 d、1周、1个月、3个月时VAS评分、ODI评分、JOA评分比较差异均无统计学意义(P>0.05,见表3~5)。

表3 两组患者手术前后VAS评分比较分)
表4 两组患者手术前后JOA评分比较分)
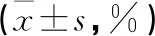
表5 两组患者手术前后ODI评分比较
典型病例为一35岁女性患者,主因“右侧腰骶部及右大腿后外侧疼痛1年,加重3个月”来院。入院查体阳性体征:右下肢直腿抬高约40 °,加强实验阳性。入院诊断:腰椎退行性变,L4~5椎间盘突出(右,旁中央型),行机器人辅助下椎间孔镜下L4~5椎间盘摘除、L5神经根减压术。术后当日即感患肢疼痛感较前明显减轻,查患肢直腿抬高约70 °。手术前后影像学资料见图2~8。

图2 腰椎正侧位、过伸、过屈、双斜位X线片未见腰椎失稳

图3 腰椎CT平扫、MRI病变层面检查符合诊断
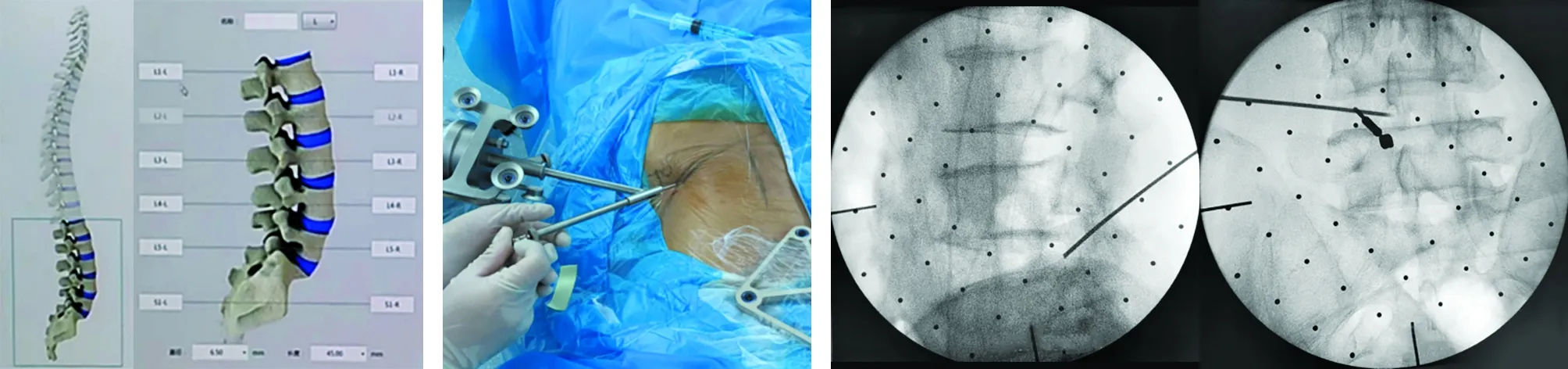
图4 3D C型臂连续扫描得到脊柱三维图像 图5 启动机器人力臂定位,穿刺目标靶点 图6 C型臂正侧位透视至目标靶点位置

图7 探查神经根周围减压满意 图8 术后腰椎MRI见神经根走行区减压可
3 讨 论
3.1 脊柱微创领域精准医疗的观念、特点、价值 微创脊柱外科是经非传统途径并借助特殊手术器械等进行脊柱疾患的诊断和治疗的技术方法。它有很多具体术式,最具代表性的是椎间孔镜技术,手术满意疗效可达75%~90%[12]。脊柱内镜下手术空间有限、技术性强,因此要求更高精度。精准医疗注重对疾病的深度特征研究和治疗的高度精准性,是精确准时的个体化诊疗模式,近年来逐渐成为医学界关注的热点。数字化骨科技术也因此应运而生[13],成为了国内外骨科的研究热点。目前,国内外已有很多丰富的研究成果,其中就包括骨科机器人技术,尤其在脊柱外科的应用更为突出[14]。王博亮等[15]通过研究发现,应用数字骨科医学计算机三维图像处理技术,可直观地显示患者病变部位的骨骼形态,精准度优于传统医学方法。王乃堃等[16]利用6个人体腰椎模型进行穿刺试验发现机器人辅助下腰神经根穿刺,提高了一次性穿刺成功率,并利于提高穿刺者穿刺水平,有较高的临床应用价值。脊柱微创外科辅助机器人(Cobot)克服了外科医师术中定位精度难,长时间手术容易疲劳的问题[17]。目前,脊柱微创术中使用的机器人多是通过C型臂X线机做术前规划和实时导航,并使用多自由度机械臂进行操作,除了脊柱内镜下定位,还可用于辅助经皮椎体成形术、人工间盘置换、椎弓根螺钉置入等,使很多传统的开放手术具备精准、微创、安全的特点,并使手术效率进一步提升,具有很高的临床应用前景。
3.2 两组患者的临床疗效分析 本研究中,对两组患者的术中指标进行分析,发现机器人组患者术中透视次数、手术时间、出血时间均少于常规组,差异有统计学意义(P<0.01)。体现了机器人辅助下穿刺定位精准、可控、安全、高效的特点。两组患者术后随访中,VAS评分、ODI评分、JOA评分均较术前改善,差异有统计学意义(P<0.001)。两组术前及术后1 d、1周、1个月、3个月时VAS评分、JOA评分、ODI评分比较差异均无统计学意义(P>0.05),说明两组方法术后能达到同样满意的效果,均是行之有效的治疗手段。常规组术后1例患者出现硬脑膜漏。一方面原因考虑脊柱内镜下穿刺定位是涉及三维空间的定位[18],传统的X线透视只是二维平面上的影像,术中并不能精准判断出操作工具的具体位置。又由于椎管周围毛细血管多,且有马尾丛、神经根、硬膜囊等重要组织,穿刺平面、角度及距离难以精准控制,对术者操作经验技巧要求较高。另一方面,对存在脊柱解剖结构变异者,如存在脊柱侧弯者,由于定位不准而反复穿刺可能带来硬脑膜误伤风险。“天玑”辅助下穿刺克服了X线透视下难以清晰辨认解剖结构的劣势,能按照术中规划精确穿刺,安全、稳定性好,且有利于初学者。
综上所述,机器人辅助穿刺定位较徒手穿刺定位术中透视次数少、出血量少、手术操作时间短,且无需术前影像学规划,能结合Easy-T定位法定位,穿刺目标靶点安全、精准、理想,有利于手术操作。