实时动态闭环电生理硬件在环平台设计与实现
2023-05-27刘维桐常思远梁家玮
王 江,刘维桐,常思远,梁家玮,刘 晨
实时动态闭环电生理硬件在环平台设计与实现
王 江,刘维桐,常思远,梁家玮,刘 晨
(天津大学电气自动化与信息工程学院,天津 300072)
神经系统电刺激已经成为一种日益重要的神经科学机制探索工具和基本神经系统疾病的治疗手段,但基于期望响应的刺激信号获取需要大量的重复性实验.而且生理实验存在伦理性问题,基于纯软件仿真的电生理实验难以复现对应模拟量信号.利用硬件在环平台获取期望响应的最优刺激可解决上述问题,因此本文设计并实现了一个实时动态闭环电生理硬件在环平台,基于平台可以实现神经系统电生理,通过神经调控策略获取刺激信号,进行神经系统的刺激机制探索和基本神经调控手段的优化.本文设计的平台包括硬件回路和图形用户界面,其中硬件回路主要在数字信号处理器上构建,实现了人工神经系统和闭环控制器的片上集成;上位机图形用户界面的开发实现了人机交互,用户可根据需要进行不同模型、控制算法的闭环电生理实验.基于该平台,本文实现了皮层-基底核-丘脑回路神经网络的实时硬件计算,并获得了期望网络状态的刺激信号.结果表明,相比于I5-8400中央处理器的仿真模拟,该实时动态闭环电生理硬件在环平台可将神经元网络状态的高速计算提升近40倍.而且平台实现的迭代学习控制策略可进一步缓解传统比例积分闭环电生理实验中参数整定的难度,有效提高刺激信号的调控精度.
闭环电生理;实时;硬件在环平台;神经计算模型
人体的神经系统是由数以亿计的神经元组成的复杂网络,神经系统中信息的编码与处理在很大程度上是通过大量神经元构成的群体协同活动完成[1-2].随着科技进步与数据增长,使得依据输入输出关系探索神经系统的机制成为可能[3].
电生理技术是指以多种形式的能量刺激生物体,测量、记录和分析生物体发生的电现象和生物体的电特性的技术[4].电生理技术为神经系统机制研究提供了数据基础,然而传统的电生理只能实现开环形式固定模式刺激,探索某一外加刺激下神经系统的反应.“刺激-反馈”通道的缺乏使得在探索某一相对应刺激的过程中只能使用试凑法和经验法,大大增加了实验量而且刺激信号不够精准[5].在电生理学实验中对神经系统施加各种电刺激并记录体内或体外神经组织电活动同步的输出信号,针对测量出的电信号进行估计和分析并加以控制,可构成闭环电生理系统.闭环电生理技术已经成为基于期望神经系统获取刺激信号的有效途径,比例积分(proportional-integral,PI)控制、模糊控制、预测控制等先进的控制算法获得基于响应获取最优刺激信号,大大减少了所需实验次数和刺激信号误差[6-8].同时,基于模型的闭环电生理实验使用经验证的神经元或神经系统模型代替神经组织,进一步避免了伦理性问题,并可更加高效、低成本地实现神经调控算法的验证、神经系统结构功能探索的功能等目的[9-10].
通过计算机仿真闭环电生理实验难以模拟临床应用中的信号传输延时、环境噪声以及刺激伪迹等因素,导致验证的闭环算法难以临床应用[11].利用硬件处理器构建电子神经系统模拟生理神经系统的运行状态,并与硬件控制器形成闭环可构成实时动态闭环电生理硬件在环平台[12].与软件仿真相比,实时动态闭环电生理硬件在环平台具有便捷、快速、准确、实时性高、易实现等特点.此外,基于硬件设计的电子神经系统有应用在神经疾病监测和神经系统理论研究方面的潜力[13].
因此,本文设计并实现了一个实时动态闭环电生理硬件在环平台,为寻找神经系统调控刺激、神经调控算法验证以及神经系统机制探索提供一个工具.实时动态闭环电生理硬件在环平台主要在数字信号处理器(digital signal processor,DSP)上进行实现,具备实现多神经系统模型、多神经调控算法的能力.同时,为测试实时动态闭环电生理硬件在环平台性能,本文在平台上实现了基底核网络,并使用控制算法对其进行了闭环调控,探索了产生期望放电模式所需的刺激信号.
1 方 法
1.1 实时动态闭环电生理硬件在环平台
1.1.1 平台需求分析
实时动态闭环电生理硬件在环平台的设计目标是实现硬件神经系统的闭环调控,获取期望输出对应刺激.为完成上述目标,平台主要需求如下.
(1) 构建人工神经系统:构建能够模拟真实神经系统活动的硬件神经系统,且硬件神经系统可根据不同刺激进行实时的状态和输出的更新.
(2) 构建闭环控制器:硬件控制器可嵌入多种控制算法,并基于期望信号对硬件神经系统进行实时闭环调控.
(3) 设计用户图形界面:设计上位机用户界面对神经元活动信息、控制信号等进行监测,并对控制算法及模型参数进行调整.
1.1.2 实时动态闭环电生理硬件在环平台设计
根据上述需求,构建实时动态闭环电生理硬件在环平台.平台结构如图1所示,人工硬件神经系统实时计算产生的数字电生理信号经过信号处理过程传输到闭环控制器.同时,控制器基于人工神经系统实时输出与期望放电信号,通过刺激单元不断向人工神经元施加仿真电刺激,达到闭环调控的目的.上位机用户图形界面可对控制信号、仿真电生理信号等进行实时监控和设置,为闭环电生理实验提供实时可视化基础.
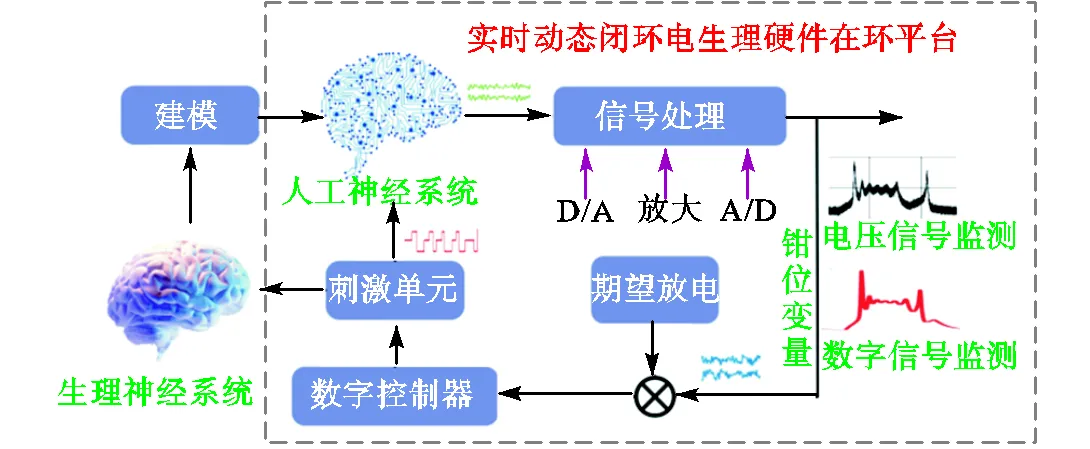
图1 实时动态闭环电生理硬件在环平台结构
实时动态闭环电生理硬件在环平台可以进行不同控制算法、不同刺激钳位、不同神经系统模型的闭环电生理实验,经过实验充分验证的控制器和控制算法可为真实神经系统实验闭环调控提供基础.
1.2 皮层-基底核-丘脑网络模型
1.2.1 Izhikevich神经元模型
Izhikevich神经元模型由Izhikevich在2003年末提出,具有结构简单、生理学含义丰富、多种行为仿真能力等优点,适合神经元网络仿真[14].Izhikevich模型表述为

1.2.2 皮层-基底核-丘脑回路模型
皮层-基底核-丘脑回路是跨越神经系统端脑和间脑区域主要结构,对于记忆、运动、选择等认知功能具有关键作用,也是运动症状相关帕金森病主要病灶区域[15-16].
根据基底核网络模型研究,构建皮层-基底核-丘脑回路模型[17].模型结构如图2所示,在基底核中:每个底丘脑核(subthalamic nucleus,STN)神经元受到2个锥体神经元(pyramidal,PY)神经元的兴奋性投射和2个苍白球外侧(globus pallidus externa,GPe)神经元的抑制性投射;每个苍白球内侧(globus pallidus interna,GPi)神经元受到3个随机STN神经元的抑制性投射和1个GPe神经元抑制性输入;每个GPe神经元受到3个STN神经元的兴奋性投射以及其他2个GPe神经元抑制性投射.在皮层中:每个PY神经元受到2个丘脑(thalamic,Th)神经元的兴奋性投射以及1个中间(interneuron,IN)神经元的抑制性投射;每个IN神经元受到4个PY神经元兴奋性投射.在丘脑中:每个Th神经元受到8个GPi神经元的抑制性投射.

图2 皮层-基底核-丘脑回路结构与耦合方式
如表1所示,使用不同参数Izhikevich模型模拟各个神经核团内神经元,每个核团包含100个神经元.
表1 各核团Izhikevich模型参数

Tab.1 Izhikevich model parameters of each nucleus
各核团神经元输入包括输入电流和核团间耦合突触电流,突触电流具体表达式为



表2 各核团间突触连接强度参数

Tab.2 Strength parameters of synaptic connections be-tween nuclei
1.2.3 皮层-基底核-丘脑回路模型实现
对皮层-基底核-丘脑回路模型进行实现,具体步骤为神经元模型离散化、神经元状态初始化、状态计算和更新.首先使用欧拉法对每个Izhikevich神经元进行离散化,即

然后对突触电流计算进行离散化处理,即



皮层-基底核-丘脑回路模型具体实现结构如图3所示.其中,各神经元之间连接由10个100×100的连接矩阵决定,每个矩阵决定具有投射关系的两个核团各神经元之间连接方式.

图3 皮层-基底核-丘脑回路实现结构
2 结 果
2.1 实时动态闭环电生理硬件在环平台实现
基于神经系统模型构建的实时动态闭环电生理硬件在环平台实物如图4所示.平台主要包括上位机、基于DSP的人工神经系统、闭环控制器以及相关的信号转换和检测电路.本平台主要基于TMS320F28377 DSP实现,其具有两个TMS320C28x 32位中央处理器,主频最高可达到200MHz.DSP具有独立的乘法器,可以在一个时钟周期内完成乘法指令,适用于实现神经元的高速仿真计算和控制信号的实时计算.

图4 实时动态闭环电生理硬件在环平台
该平台主要包括两个DSP:一个DSP实现高精度人工神经系统计算,实时输出模拟量电生理活动信号;另一个DSP实现数字闭环控制器,实时接收神经系统活动状态,并根据期望给出相应的模拟量信号.数字信号和模拟信号转换通过数模转换器(digital-to-analog converter,DAC)和模数转换器(analog-to-digital converter,ADC)实现.采用双通道低功耗12位DAC,转换后数字量分辨率为1/4095,其主频与C28x内核相同,最高频率为200MHz,吞吐量为1×106次/s.采用12位具有独立采样保持电路的ADC,最高输出电压为3.3V,转换后电压模拟量分辨率为80mV,主频为3.5MHz,采样频率为140kHz.
上位机图形用户界面用于对闭环电生理平台中人工神经系统和闭环控制器的关键参数的监控和设置.硬件平台与上位机通过串行通信接口(serial communication interface,SCI)连接,保证信息传输稳定.SCI使用8位全双工通信传输方式,DSP中计算得到的神经信息和控制信号为32位高精度浮点数.因此在传输时需要将神经活动、控制信号等高精度浮点数切分成4个字符数据分别传输到上位机.如图5所示,上位机图形用户界面在Visual Studio 2019上实现,主要功能包括神经活动波形显示、设置人工神经系统参数、闭环控制器参数调整、存储波形信息.

图5 平台上位机图形用户界面
2.2 皮层-基底核-丘脑回路实现验证
通过调整各核团神经元模型参数和核团间耦合参数,可以分别产生正常状态和帕金森病状态的皮层-基底核-丘脑回路各核团神经活动放电信号.表3给出模拟帕金森病(Parkinson’s disease,PD)状态所需调整的经元参数变量和核团耦合参数.

表3 PD状态下Izhikevich模型参数调整

Tab.3 Parameter adjustment of the Izhikevich model in PD state
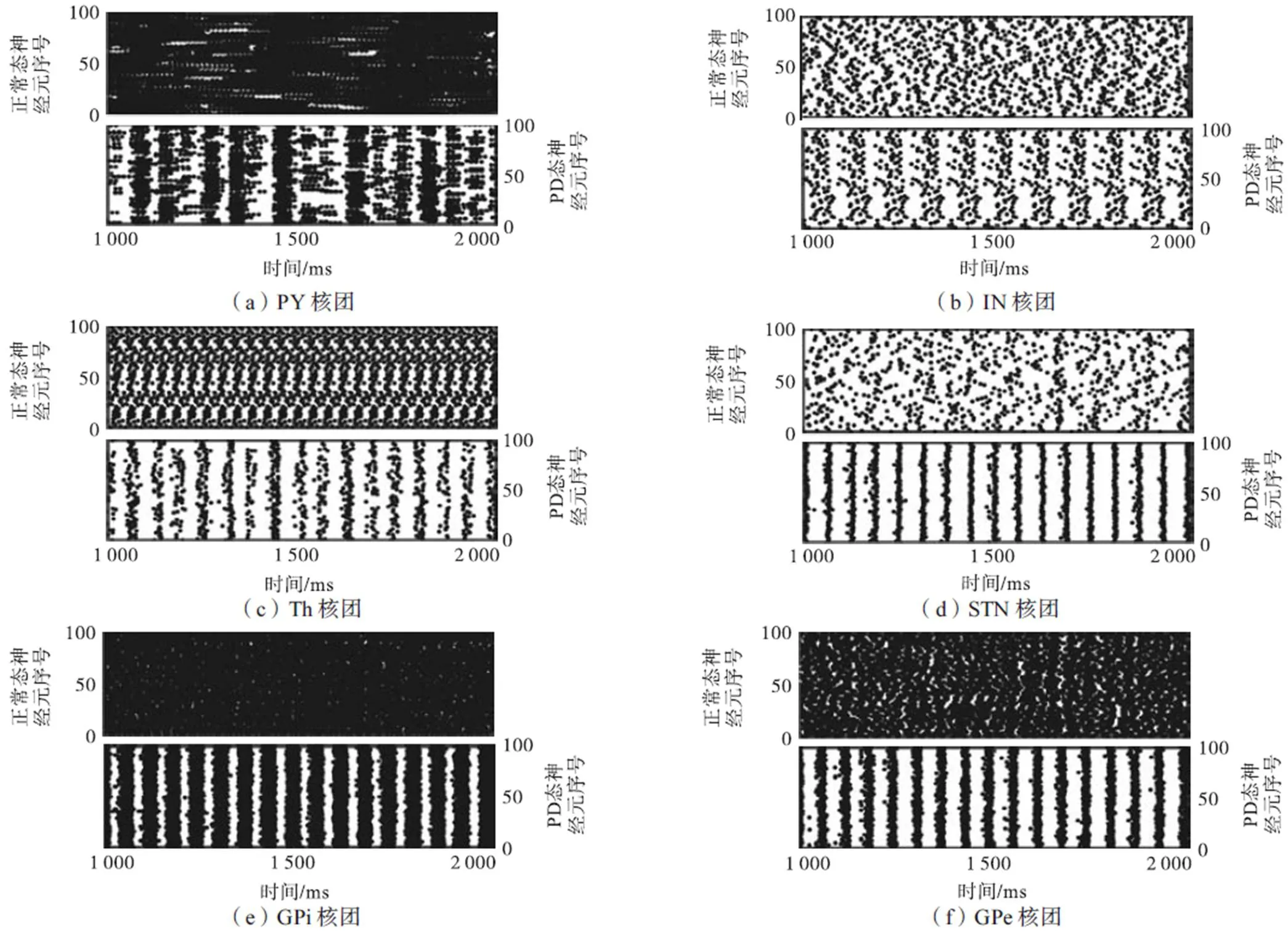
图6 皮层-基底核-丘脑回路放电栅格图
局部场电位(local filed potential,LFP)是衡量帕金森状态的另一重要指标.基底核内各核团的LFP如图7所示,在正常状态下各核团的LFP只有较低水平振荡,而在PD状态下都发生了较大的病理性振荡,与先验知识相符.

图7 基底核内神经核团LFP
根据上述验证,该皮层-基底核-丘脑人工神经网络可以实现生理神经系统在正常状态和PD状态下的单神经元与整体网络的放电活动.
将该网络在DSP上进行硬件实现,对PD状态下振荡明显的基底核各核团LFP进行监测,结果如图8所示.基底核各核团LFP在PD状态下振荡效果与软件仿真一致,且输出为模拟电压电生理信号,基于DSP的皮层-基底核-丘脑回路实现得到验证.在使用相同模型情况下,DSP平台进行600个Izhikevich神经元一个时间步长迭代更新需要约4800000个时钟周期,所需时间大概为24ms,而在I5-8400中央处理器计算机上进行同样的仿真需要1000ms左右.DSP平台相较于计算机有更快的计算速度.

图8 基底核内各神经核团LFP实现
2.3 皮层-基底核-丘脑回路闭环刺激信号获取
2.3.1 基于PI控制算法的刺激信号获取
基于实时动态闭环电生理平台可以使用各种控制算法对皮层-基底核-丘脑回路进行控制[18-19].本节使用经典的PI控制算法,如图9所示,以STN为刺激靶点,以基底核中STN核团的LFP为钳位变量对基底核回路进行闭环调控.

式中:为t时刻STN核团期望LFP与实际钳位反馈LFP的差值;、分别为PI控制比例系数和积分系数.


图10 基于PI控制的期望刺激信号获取
图10(a)为STN核团LFP的控制结果,在2000ms时开始施加控制信号,可以看到钳位变量STN的LFP振荡现象消失,被控制到期望的正常状态[20-21].所求的期望控制信号如图10(b)所示.图10(c)、(d)分别为对应的硬件电路模拟电压信号结果,硬件平台实现结果与仿真结果具有一致性.
对PD状态下振荡效果明显的GPi、GPe核团进行监测,其闭环调控下放电栅格图如图11所示,其同步放电效果在受控制后消失,皮层-基底核-丘脑回路被控制到正常状态.

图11 闭环调控下GPe和GPi核团放电栅格图
2.3.2 基于迭代学习控制算法的刺激信号获取
虽然经典的PI控制可以控制PD状态下的皮层-基底核-丘脑回路得到期望的刺激信号,但在使用PI控制策略的闭环电生理实验中,控制参数的调整需要有经验的实验者进行反复试错.且由于神经系统具有高度的复杂性和不确定性,合适的控制参数选取十分困难.可在闭环电生理平台上进行基于迭代控制(iterative learning control,ILC)算法[22-25]的实验解决参数选定问题,ILC算法框图如图12所示.
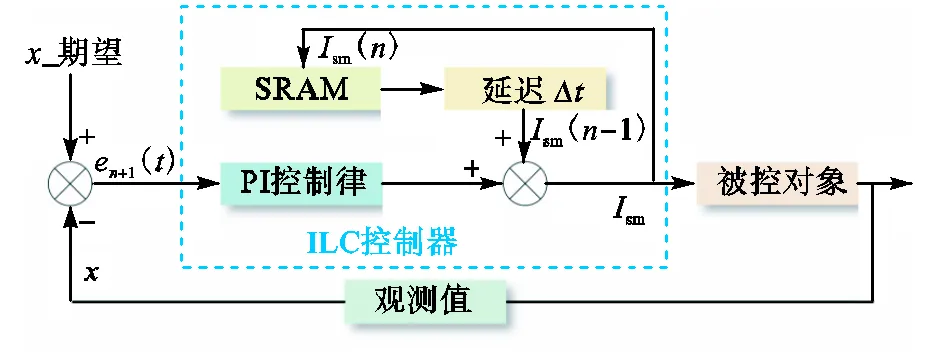
图12 ILC算法框图



控制结果如图13所示,图中为迭代周期,当=1时,只有PI控制发挥作用,由于参数调整不佳,钳位处STN核团的LFP与期望有明显误差.基于ILC算法获取期望刺激信号不需要调整控制参数,随着迭代次数的增加控制参数自适应调整,使得控制误差逐渐减小,从而可以获取更加准确的期望刺激信号.

图13 基于ILC算法的不同迭代周期的控制效果
不同迭代周期误差如图14所示.由图14可知在不改变控制参数的前提下,ILC算法能够不断减小控制误差,获得更加准确的期望刺激信号,降低控制参数调整难度.图中误差计算公式为

图14 基于ILC算法的闭环调控误差随迭代周期变化曲线

式中为每个迭代周期的总时间长度.
3 结 语
本文提出并实现了一个闭环电生理硬件仿真平台.平台基于TMSF28377D DSP实现,并基于Visual Studio设计了对应的上位机用户图形界面.本文使用皮层-基底核-丘脑回路为对象进行了基于平台的闭环电生理实验,探索了基于期望信号的最佳刺激获取方式.本文对皮层-基底核-丘脑回路的DSP实现做了详细介绍,并给出了实现结果.闭环电生理硬件仿真平台实现的皮层-基底核-丘脑网络与基于Matlab仿真网络特性具有一致性,且基于DSP计算神经系统网络相较于I5-8400中央处理器有较大的速度提升.在对皮层-基底核-丘脑回路进行闭环调控探索最优刺激信号的过程中,实现了PI控制算法和ILC控制算法对网络的控制,并验证了ILC算法减小参数设置难度,提升控制精度的作用.本文提出的闭环电生理硬件仿真平台还可通过实现不同的神经系统模型,选取不同的钳位反馈变量,选取不同的控制策略来进行多种闭环电生理实验,探索神经调控中的最佳刺激,探索神经系统机制等,可促进神经系统疾病调节和闭环神经科学的发展[26-27].
[1] D’Angelo E,Jirsa V. The quest for multiscale brain modeling[J]. Trends in Neurosciences,2022,45(10):777-790.
[2] 张建国,马 羽,刘焕光. 脑深部电刺激术在中国的发展现状[J]. 中国神经精神疾病杂志,2009,35(7):385-387.
Zhang Jianguo,Ma Yu,Liu Huanguang. Developmentstatus of deep brain stimulation in China[J]. Chinese Journal of Nervous and Mental Diseases,2009,35(7):385-387(in Chinese).
[3] Muldoon S F. Data-driven computational modeling predicts “superhubs” play key role in epileptic dynamics[J]. Neuron,2021,109(16):2501-2503.
[4] Arsiero M,Lüscher H R,Giugliano M. Real-time closed-loop electrophysiology:Towards new frontiers in in vitro investigations in the neurosciences[J]. Archives Italiennes de Biologie,2007,145(3):193-209.
[5] Bauer J A,Lambert K M,White J A. The past,present,and future of real-time control in cellular electrophysiology[J]. IEEE Transactions on Bio-Medical Engineering,2014,61(5):1448-1456.
[6] Chien C J,Hsu C T,Yao C Y. Fuzzy system-based adaptive iterative learning control for nonlinear plants with initial state errors[J]. IEEE Transactions on Fuzzy Systems,2004,12(5):724-732.
[7] Jianming Z,Shengdun Z,Shuguo W. Fuzzy iterative learning control of electro-hydraulic servo system for SRM direct-drive volume control hydraulic press[J]. Journal of Central South University of Technology,2010,17(2):316-322.
[8] Liu C,Wang J,Li H,et al. Model-based iterative learning control of Parkinsonian state in Thalamic relay neuron[J]. Communications in Nonlinear Science & Numerical Simulation,2014,19(9):3255-3266.
[9] 袁春华,王 江,邓 斌. 不同神经元模型在直流外电场下的适应性机制分析[J]. 天津大学学报(自然科学与工程技术版),2017,50(12):1280-1287.
Yuan Chunhua,Wang Jiang,Deng Bin. Analysis of different kinds of adaption mechanisms of neuron model under external direct electric field[J]. Journal of Tianjin University(Science and Technology),2017,50(12):1280-1287(in Chinese).
[10] 曹玉珍,高晨阳,余 辉,等. 基于卷积神经网络和迁移学习的癫痫状态识别[J]. 天津大学学报(自然科学与工程技术版),2021,54(10):1094-1100.
Cao Yuzhen,Gao Chenyang,Yu Hui,et al. Epileptic seizure recognition using convolutional neural networks and transfer learning[J]. Journal of Tianjin University (Science and Technology),2021,54(10):1094-1100(in Chinese).
[11] Bullock D,Johnson B,Wells R B,et al. Hardware-in-the-loop simulation[J]. Transportation Research Part C:Emerging Technologies,2004,12(1):73-89.
[12] Acciarito S,Cardarilli G C,Cristini A,et al. Hardware design of LIF with latency neuron model with memristive STDP synapses[J]. Integration,2017,59:81-89.
[13] 郝新宇,王 江,邓 斌,等. 可用于机械臂控制的小脑脉冲神经元网络研究与FPGA实现[J]. 控制与决策,2021,13(5):1-13.
Hao Xinyu,Wang Jiang,Deng Bin,et al. Research on cerebellar SNN model and FPGA implementation for robotic arm control[J]. Control and Decision,2021,13(5):1-13(in Chinese).
[14] Leigh A J,Mirhassani M,Muscedere R. An efficient spiking neuron hardware system based on the hardware-oriented modified Izhikevich neuron(HOMIN)model[J]. IEEE Transactions on Circuits and SystemsⅡ:Express Briefs,2020,67(12):3377-3381.
[15] Liu C,Wang J,Li H,et al. Closed-loop modulation of the pathological disorders of the basal ganglia network[J]. IEEE Transactions on Neural Networks and Learning Systems,2017,28(2):371-382.
[16] Terman D,Rubin J E,Yew A C,et al. Activity patterns in a model for the subthalamopallidal network of the basal Ganglia[J]. Journal of Neuroscience,2002,22(7):2963-2976.
[17] Thibeault C M,Srinivasa N. Using a hybrid neuron in physiologically inspired models of the basal ganglia[J]. Frontiers in Computational Neuroscience,2013,7(5):234-249.
[18] Yang S,Wang J,Li S,et al. Cost-efficient FPGA implementation of basal ganglia and their Parkinsonian analysis[J]. Neural Networks,2015,71(4):62-75.
[19] Ho B,Fitz R. Bilateral basal ganglia lesions:Pediatric differential considerations[J]. Radiographics,1993,13(2):269-292.
[20] Nair S S,Muddapu V R,Chakravarthy V S. A multiscale,systems-level,neuropharmacological model of cortico-basal ganglia system for arm reaching under normal,parkinsonian,and levodopa medication conditions [J]. Frontiers in Computational Neuroscience,2022,15(10):756881.
[21] Yang A I,Vanegas N,Lungu C,et al. Beta-coupled high-frequency activity and beta-locked neuronal spiking in the subthalamic nucleus of Parkinson’s disease[J]. Journal of Neuroscience,2014,34(38):12816-12827.
[22] Li J,Li J. Adaptive fuzzy iterative learning control with initial-state learning for coordination control of leader following multi-agent systems[J]. Fuzzy Sets and Systems,2014,248:122-137.
[23] 王 岩,付永领. 模糊滑模迭代学习控制算法在液压系统中的应用[J]. 北京航空航天大学学报,2007,33(1):86-89.
Wang Yan,Fu Yongling. Application of fuzzy sliding mode iterative learning control algorithm in hydraulic servo system[J]. Journal of Beijing University of Aeronautics and Astronautics,2007,33(1):86-89(in Chinese).
[24] 张国山,李思祺. 一种基于高阶内模的新型自适应迭代学习算法[J]. 天津大学学报(自然科学与工程技术版),2022,55(5):480-488.
Zhang Guoshan,Li Siqi. A new adaptive iterative learning algorithm based on a high-order internal model[J]. Journal of Tianjin University (Science and Technol-ogy),2022,55(5):480-488(in Chinese).
[25] 王佶宣,邓 斌,王 江,等. 基于PID型迭代学习控制算法的皮层网络节律调制[J]. 天津大学学报(自然科学与工程技术版),2022,55(10):1071-1081.
Wang Jixuan,Deng Bin,Wang Jiang,et al. Cortical network rhythm modulation based on the PID-type iterative learning control algorithm[J]. Journal of Tianjin University(Science and Technology),2022,55(10):1071-1081(in Chinese).
[26] Zelmann R,Paulk A C,Basu I,et al. CLoSES:A platform for closed-loop intracranial stimulation in humans[J]. NeuroImage,2020,223:117314.
[27] Newman J,Zeller-Townson R,Fong M,et al. Closed-loop,multichannel experimentation using the open-source neurorighter electrophysiology platform[J]. Frontiers in Neural Circuits,2013,6(3):321-332.
Design and Implementation of Real-Time Dynamic Closed-Loop Electrophysiological Hardware-in-the-Loop Platform
Wang Jiang,Liu Weitong,Chang Siyuan,Liang Jiawei,Liu Chen
(School of Electrical and Information Engineering,Tianjin University,Tianjin 300072,China)
Neurological electrical stimulation has become an increasingly important tool for exploring neuroscience mechanisms and treating basic neurological diseases. However,further development of this tool is encumbered by the need for numerous repetitive experiments to acquire stimulus signals of the desired response. Moreover,ethical issues are a big concern in physiological experiments,and it is difficult to reproduce the corresponding voltage signals in electrophysiological experiments based on software simulation. However,the abovementioned problems can be resolved using a hardware-in-the-loop platform to obtain the desired optimal stimulation response. This study designed and implemented a real-time dynamic closed-loop electrophysiological hardware-in-the-loop platform to realize nervous system electrophysiology,acquire desired stimulation signals,and perform basic neural control strategy optimization. The platform features a hardware circuit mainly constructed around digital signal processing to enable the integration of an artificial neural system and a closed-loop controller. Its graphical user interface realizes human-computer interaction,allowing users to conduct closed-loop electrophysiological experiments involving different models and control algorithms. Moreover,this study realized the real-time hardware computation of the cortical-basal nucleus-thalamic circuit neural network and obtained optimal stimuli that can regulate the network state according to expectations. The results show that the real-time dynamic closed-loop electrophysiological hardware can improve the high-speed calculation of the neural network state by approximately 40 times compared with the I5-8400 central processing unit. Finally,the iterative learning control strategy realized on the platform can further alleviate the difficulty of parameter setting in the traditional experiment on proportional integral closed-loop electrophysiological and effectively improve the regulation accuracy of stimulus signals.
closed-loop electrophysiological;real-time;hardware-in-the-loop platform;neural computing model
10.11784/tdxbz202204041
TP23
A
0493-2137(2023)07-0735-10
2022-04-16;
2022-06-27
王 江(1965— ),男,博士,教授,jiangwang@tju.edu.cn.
刘 晨,liuchen715@tju.edu.cn.
国家自然科学基金资助项目(62173241);天津市自然科学基金资助项目(20JCQNJC01160).
Supported by the National Natural Science Foundation of China(No.62173241),the Natural Science Foundation of Tianjin,China(No.20JCQNJC01160).
(责任编辑:孙立华)
