基于YOLOv5算法的名优茶采摘机器人*
2023-05-26代云中蒋天宸杨新茂文宏康
代云中 , 蒋天宸 , 杨 威 , 杨 昕 , 杨新茂 , 刘 杨 , 文宏康
(1.宜宾职业技术学院智能制造学院,四川 宜宾 644003;2.电子科技大学航空航天学院,四川 成都 611731)
0 引言
名优茶采摘原料要求是“独芽、无黑头、无发酵”以及“一芽一叶、一芽两叶、一芽三叶”等,采摘时间为1~2天,及时采摘才能凸显名优茶的颜色、气味、口感[1-2]。文献[3]的市场调研表明,名优茶(特级茶)的市场均价约为1 200 元/kg,两叶/三叶的市场均价为100 元/kg。研究表明,名优茶虽然价格高,但是销量好,是更受广大人民喜爱的品质,但采摘不及时会造成产量低的情况出现[4-5]。
人工采摘名优茶一般每人每天工作8 h左右,最多也只能采摘2 kg~3 kg的茶叶,劳动强度大且工作效率低,特别到了春茶季节,叶芽不及时采摘将影响成品茶的质量[6-8]。名优早春茶具有较高的实用性与经济价值,名优茶采摘仍多为人工采摘,存在采摘效率低、采摘不及时等问题,给茶农带来了巨大的损失,采摘效率低成为名优茶产业高质量发展的瓶颈[8-10]。随着人工智能、高速GPU大容量芯片、云计算、智能技术等一系列学科和技术的交互与衍生,使机器自动采摘名优茶成为可能。
针对人工采摘名优茶成本高且效率低的问题,非常有必要设计一种高效的智能采摘系统和采摘方法。本文基于人工智能、传感器、云服务器等技术,提出了一种基于图像识别的名优茶智能采摘系统及方法,很好地解决了人工采茶效率低且成本高的问题[11-12]。
1 名优茶智能采摘系统
本文提出的基于YOLOv5算法的智能采摘机器人主要包括数据获取单元、服务器、控制单元、电机驱动器、滑台、末端名优茶机械采摘手、通信单元。
整个名优茶智能采摘系统工作过程如图1所示。其中,数据获取单元用于获取一个区域的名优茶图像信息和距离信息,并将获取的信息传至服务器。在收到获取的信息后,服务器对获取的图像信息进行图像识别,将识别结果符合要求的信息的距离信息转换为坐标信息并发送给控制单元。控制单元将坐标信息转换为可变脉宽PWM信号,并将PWM信号发送给电机驱动器。然后电机驱动器根据PWM信号控制滑台向多轴进行移动,并在信号指示位置控制机械手进行名优茶的采摘和收集[1-2]。

图1 系统工作流程示意图
在整个系统中,数据采集单元与服务器、服务器与控制单元、控制单元与电机驱动器、电机驱动器与滑台通过通信模块实现数据传输。数据采集单元通过USB免驱动的双目测距同步模组进行图像的获取,通过激光测距模组来获取图像的位置信息。
服务器对获取的图像信息进行识别,将识别结果符合要求的信息的距离信息转换为坐标信息,在将位置信息发送给控制单元前,将图像划分为N个区域,并计算获取N个区域中心的坐标信息,其中N为机械手的数量。在每个所述区域内,通过蚁群算法计算获取机械手的行进路径坐标[3-4]。
控制单元包括三个PWM接口。机械手通过红外感应器来感应名优茶并控制刀片靠拢完成名优茶的采摘。系统包含一个供电单元,供电单元设置有2个12 V/2 A的电池,串联后由24 V转12 V的直流转换器进行降压输出。
2 名优茶智能采摘机器人设计
本课题提出的名优茶采摘机器人如图2(a)所示,采用可独立运动且无重叠工作区域的2组采摘装置。2组独立的单芽采摘装置组装为一个整体后,用4支带有轮子的支腿连接,整个设计采用轻质的铝合金框架结构,质量仅约20 kg,制造成本较低且便于搬运。单组采摘装置如图2(b)所示,包括上层的双目摄像头,下层的采摘装置,X、Y、Z轴的运动装置以及搭载在Z轴的单芽采摘手,以此完成名优茶的智能采摘。
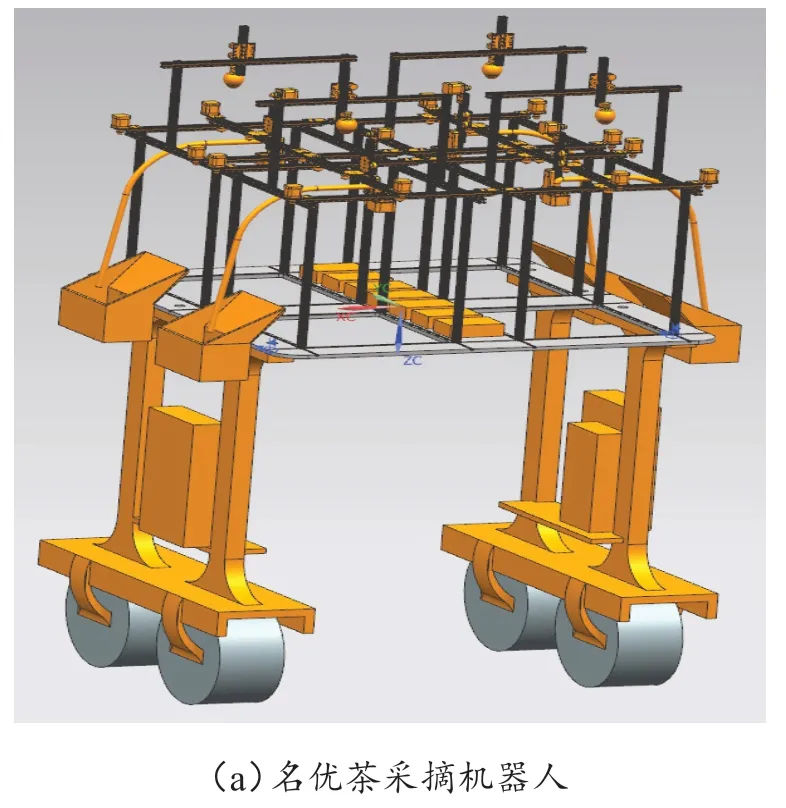
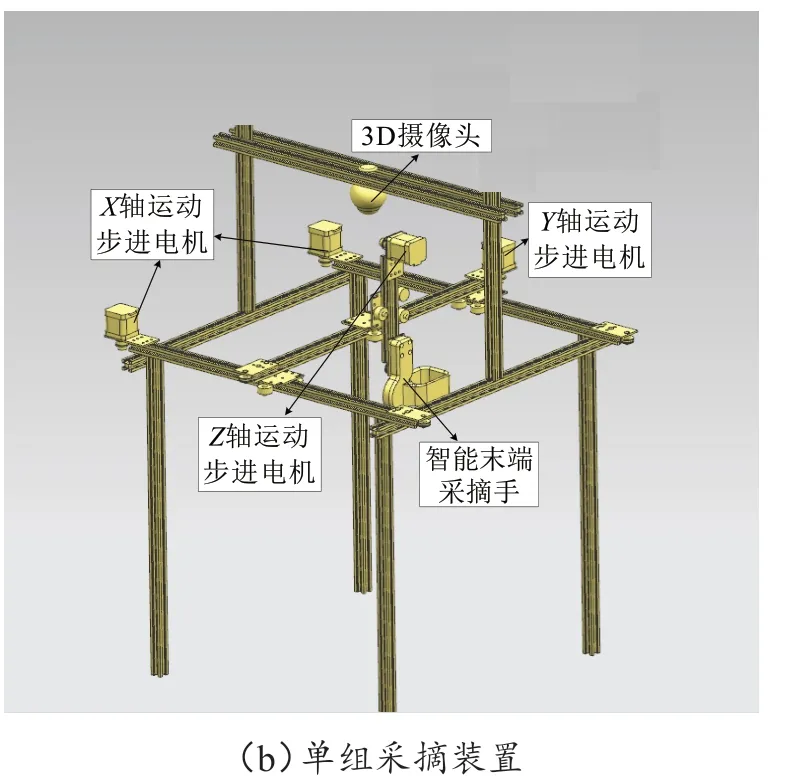
图2 总体机械设计图
3 基于图像识别的茶叶智能采摘方法
课题组还设计了一种基于图像识别的名优茶智能采摘方法,该方法包括以下步骤:
步骤A,通过数据获取单元获取设定区域的名优茶及其三维坐标,并将其上传至服务器。
步骤B,服务器通过图像识别算法识别图像内是否为可采摘的名优茶,再将位置信息转换为坐标信息,并将坐标信息上传至控制单元。
步骤C,控制单元将坐标信息转换为PWM信号,并传给电机驱动器。
步骤D,根据PWM信号控制滑台向多轴进行移动,并在信号指示位置控制机械手进行名优茶的采摘和收集。
4 系统具体实施细节
系统服务器将识别结果符合要求的信息的距离信息转换为坐标信息的具体步骤为:服务器通过YOLOv5算法对图像进行识别,判断图像是否为可采摘的名优茶,如果判断结果为不是可采摘的名优茶,则进行下一区域的图像获取;如果判断结果为是可采摘的名优茶,则提取图像的位置信息,并将图像的位置信息转换为坐标信息。接着将具体坐标发送给机器人,控制机器人采摘手运动到目标名优茶位置完成采摘[7]。
把双目摄像头视觉拍摄范围内的茶叶分成不同的采摘区域。2区是指将采摘区域分成2个独立的采摘区域,每个区域均有独立的机械采摘手进行采摘。4区则是指将采摘区域分成4个独立的采摘区域。本文提出的智能采摘手的分区采用2区,在不影响采摘质量的前提下,可有效节约硬件成本。
为了实现茶叶机械采摘手依次将采摘区域内的名优茶完全采摘,需要对名优茶的采摘路径进行规划,本文采用了蚁群算法作为采摘路径的规划算法。在实现蚁群规划算法时,需要先将双目摄像头获得的所有名优茶坐标数据进行归一化处理,再对整个采摘区域进行2分区。本文的采摘区域分区原理是使名优茶采摘区域内的名优茶数量相等或者分区后的采摘区域面积基本相同。首先,初始化蚁群算法中的参数,然后进行解空间构建,接着采用贪婪法则计算下一个需要采摘的名优茶位置。实现一次循环后,会得出一个最优解,然后将信息素进行全局更新,再进行下一次迭代,迭代次数加1,从而重新开始求解新一轮的最优解。当迭代次数达到了设定值,将得到的最优解进行输出,从而完成路径规划[6]。
基于GPU芯片的视觉图像处理与运动控制系统技术路线如图3所示。首先,采用英伟达GeForce RTX30系列的GPU对双目摄像头拍摄的茶叶图像进行降噪、灰度化、分割等预处理,对分割完的茶叶图片形态进行分类,确定名优茶采摘对象为单芽,同时确定名优茶的X、Y坐标;其次,通过蚁群规划算法确定目标区域内各名优茶的采摘顺序,根据得出的目标叶芽X、Y坐标控制采摘手X、Y轴步进电机运动到目标叶芽位置,同时触发激光测距仪测出目标区域各个叶芽与采摘手的距离,得出目标叶芽的Z坐标;最后,根据目标叶芽的Z坐标控制Z轴步进电机运动到目标叶芽位置完成采摘。
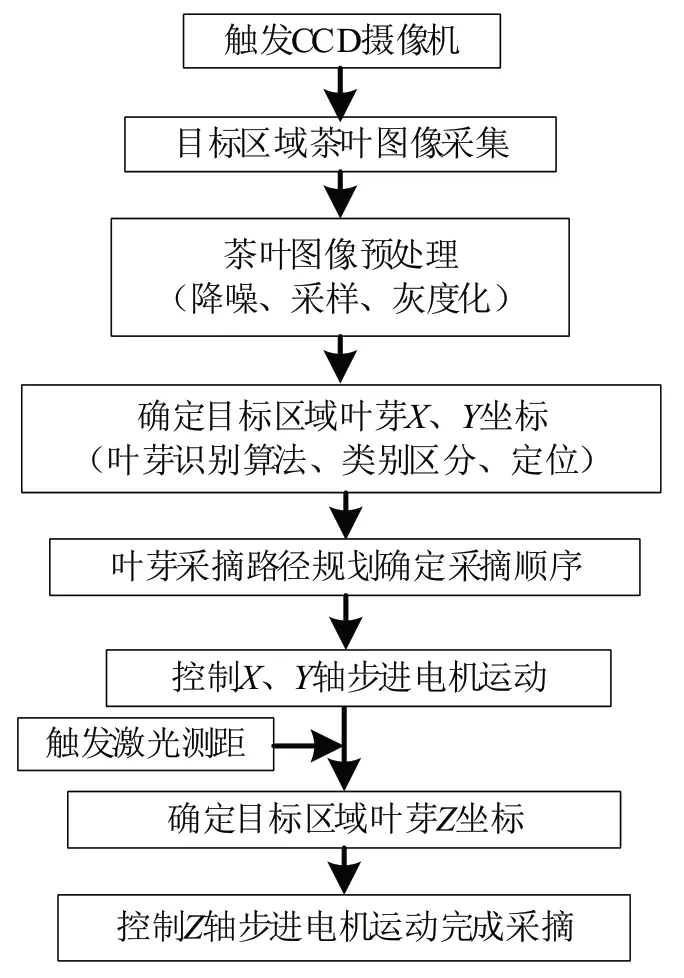
图3 基于GPU芯片的视觉图像处理与运动控制系统技术路线
5 基于YOLOv5算法的名优茶识别实验
基于TensorFlow和OpenCV图像处理的软件开发方法及YOLOv5算法,采集了名优茶的图像,形成了名优茶的图像数据库,并对数据库图像进行了初步分析。采用YOLOv5算法对名优茶进行人工智能识别的实验图如图4所示。
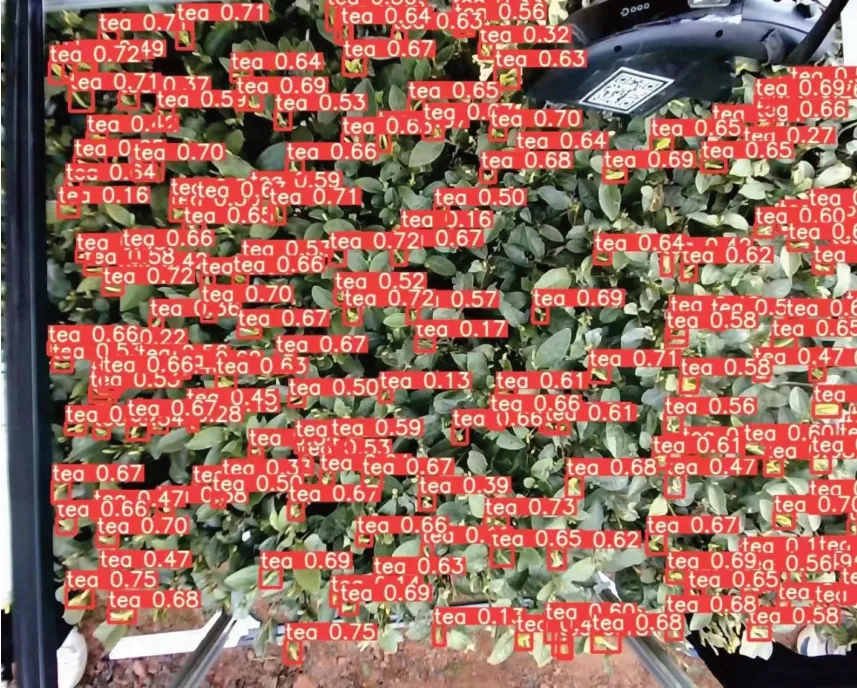
图4 茶叶名优茶目标及其验证中心点
6 结论
课题组设计了一种基于图像识别的名优茶智能采摘系统及方法,并对采用YOLOv5算法对名优茶进行人工智能识别的过程进行了实验,与现有技术相比,主要有以下几个优点:
1)由控制单元、滑台、机械手组合而成的名优茶智能采摘机器人能显著提高名优茶采摘的效率。
2)通过YOLOv5算法进行图像识别,提高了名优茶采摘的准确度。
3)使用服务器进行图像识别和数据处理的方式,降低了单个设备的价格,有利于推广。
4)通过服务器进行复杂数据处理的方式,可以配备大量操作设备,适合大规模采摘,缩短大面积采摘的时间。
5)通过路径规划和红外感应的方式,可以降低对不能采摘的名优茶的损坏。
