升力体飞行器飞行航区安全性精细化评估方法研究
2023-05-12戴世聪王美利薛鹏飞薛妙轶
戴世聪 王美利 薛鹏飞 薛妙轶
空间物理重点实验室,北京 100076
0 引言
飞行航区安全性即故障状态下地面目标的安全性,重点关注故障状态下飞行器残骸对地面目标的毁伤风险。升力体飞行器具有飞行速度快、机动性强的特点,是目前国内外研究热点[1-3]。为了开展升力体飞行器设计研究,需要开展大量的飞行试验进行设计验证与考核。不同于无升力的弹道式飞行器,升力体飞行器长时间在大气层内飞行,其失控后的残骸散布受残骸气动外形、大气参数、失控点弹道参数等的综合影响,一次飞行试验中,故障状态下可能的残骸散布范围沿飞行航线分布且宽度较大。传统的安全性评估方法依据故障状态下的残骸散布划定航区安全控制区,并限制特定等级以上的人口聚集区。但随着国民经济的发展,可选的飞行试验航线附近不可避免的存在部分人口、财产密集的待保护区域,在开展飞行试验时,需要对待保护区域的安全性风险进行精细评估,用于判断对人员、物资转移的必要性。
飞行器残骸落入保护区的概率由出现故障的概率和出现故障后残骸落入保护区的概率两部分组成。出现故障后残骸落入保护区概率的计算方法已较成熟,不是本文研究重点,一般根据蒙特卡洛打靶仿真给出概率分布,再根据保护区域位置与面积进行概率计算,见文献[4-5]。对于故障概率计算,文献[6]将故障概率按照“频繁”到“不可能”划分为5个等级,并给定各等级的发生概率,其计算结果需要进一步结合飞行器的可靠性分析结果进行修正。文献[4]和[7]采用故障树分析将飞行任务整体的故障拆解为几个故障事件,未考虑飞行过程中故障概率的变化。文献[8]和[9]将故障概率与航程或时间线性关联,但实际飞行任务中各飞行剖面可能存在较大差异,导致单纯按照时间或航程分析可靠性并不准确。因此需要一种能够详细考虑飞行过程中故障概率随飞行状态变化的评估方法,实现对残骸落入保护区概率的详细分析。
本文提出了一种基于可靠性分时评估的升力体飞行器飞行试验安全性风险精细评估方法,通过对飞行器可靠性的分时段、分子系统评估,结合飞行仿真计算给出飞行航区安全性的定量评估结果。该方法能够反映飞行器长时间飞行后各系统当前状态和飞行历程变化所带来的故障概率差异,同时能够反映飞行器各分系统的工作原理差异带来的故障概率分布差异。
1 飞行安全性分析问题的提出与转化
1.1 飞行安全性分析问题的提出与常规计算方法
针对飞行试验中飞行器残骸落入特定保护区域的概率开展计算分析方法研究。飞行过程中任意时刻均可能发生故障。
针对上述问题,按照不同的精细化程度有2类常规方法。精度较低的分析方法中,残骸落入保护区的概率Pgzlr为:
(1)
其中P为飞行可靠性,S0为保护区域面积,S为故障下残骸可能落入范围的总面积。该方法忽略故障概率随飞行的变化,也忽略残骸落入保护区的概率随保护区位置的变化,直接将全程故障概率与保护区面积占S的比例相乘,计算极为简便但结果精度也可能存在量级上的差异。精度稍高的方法可以对故障概率Pgz1与故障后落入保护区的概率Plr1进行细化。现有文献中,Plr1的计算主要基于打靶仿真获取航区内残骸落入各处的二维概率分布,并依据该分布和保护区的位置、大小计算残骸落入保护区的概率,与本文相同。现有文献中,Pgz1的计算主要基于时间或航程进行折算,该情况适用于飞行力、热环境变化较小的长时间飞行过程的可靠性计算。当飞行环境随时间变化剧烈时,力、热环境对可靠性的影响已经不能忽略,仍然采用时间单变量评估可靠性则不准确。本文方法重点通过细分不同系统、不同时段或飞行状态的可靠性,提高Pgz1计算的准确性。
1.2 飞行安全性分析问题转化
考虑飞行器出现故障后的残骸只会在特定的故障时段内落入保护区,因此可以首先根据飞行仿真与残骸落点仿真计算结果,给出故障后残骸可能落入保护区域的时间段T0~T1。如图1所示,若飞行器在前临界故障点发生故障,则残骸散落范围的远界刚好与保护区域近界相接;若飞行器在后临界故障点发生故障,则残骸散落范围的近界刚好与保护区域远界相接。
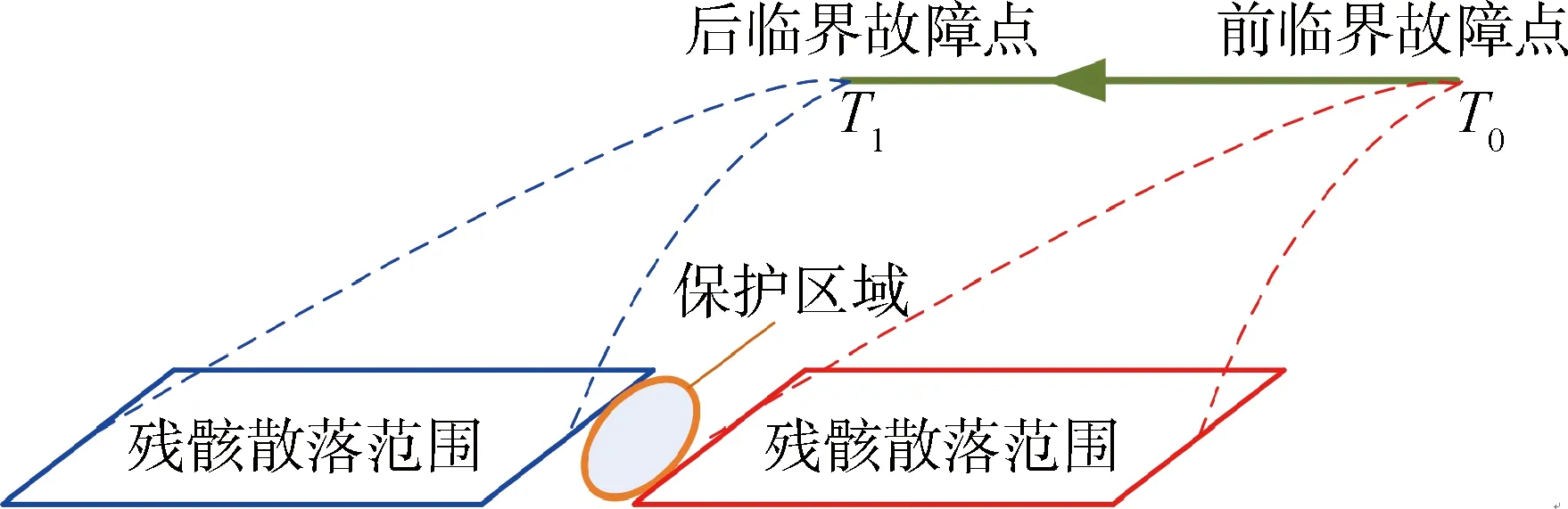
图1 故障区段示意图
由于在飞行时间T0之前以及飞行时间T1之后出现故障时,飞行器残骸均不会落入保护区,因此在计算分析中可不必考虑,重点关注T0~T1间出现故障的情况。
1.3 时段与系统拆分
考虑到不同的飞行时间点上的故障概率以及故障后落入保护区域的概率均有不同。因此,为准确计算故障残骸落入保护区的概率,需将分析区段细分为n段。分析区段内故障残骸落入保护区的概率Pgzlr为
(2)
Pi_gz为特定区段内的故障概率,Pi_lr为特定区段内发生故障时残骸落入保护区的概率。
将特定细分区段内发生故障的事件分解为飞行器飞临保护区和飞行器在保护区发生故障两个事件的串联,即特定细分区段内的故障概率计算式为:
Pi_gz=Pi_fore·(1-Pi_crnt)
(3)
Pi_fore表示飞行器从起飞至特定位置的工作可靠度,由从起飞至特定位置的各飞行器分系统可靠度串联相乘得到;Pi_crnt表示特定细分区段内工作可靠度,同样也由特定细分区段内各飞行器分系统可靠度串联相乘得到,即:
Pi_fore=Pi_fore_Sys1·Pi_fore_Sys2·Pi_fore_Sys3…
(4)
Pi_crnt=Pi_crnt_Sys1·Pi_crnt_Sys2·Pi_crnt_Sys3…
(5)
根据各飞行器分系统可靠性数据,确定每个飞行器分系统、每个细分区段内的工作可靠度、Pi_fore_Sys1、Pi_fore_Sys2、Pi_fore_Sys3、…、Pi_crnt_Sys1、Pi_crnt_Sys2和Pi_crnt_Sys3…
每个细分区段内的Pi_lr可针对残骸散布形貌,通过气动特性、质量特性等参数的拉偏打靶仿真得到,偏差模型取正态分布(3σ),其计算方法此处不再赘述。
2 升力体飞行器分时可靠性计算
2.1 飞行器系统组成可靠性框图
典型的升力式飞行试验飞行器由结构系统、防隔热系统、控制系统、测控系统组成,其可靠性框图见图2。

图2 升力式飞行器可靠性框图
2.2 控制系统可靠度计算
控制系统主要实现飞行过程中对试验飞行器的制导、姿态控制、时序控制和自主安控功能。控制系统一般由计算机、伺服系统、导航装置、控制电池、电缆网等组成,控制系统全程工作可靠性框图如图3所示。

图3 控制系统工作可靠性框图
控制系统主要由各类电子设备组成,失效模式属于指数分布特征,其可靠度与任务持续时间为减函数关系,计算公式见式(6)。
(6)
式中,λkz为与控制系统可靠性相关的常数,T为每个细分时间段的持续时间,t0为所关注飞行段的开始时间。
2.3 防隔热系统可靠度计算
防隔热系统可简单划分为防热产品与隔热产品。防热产品的可靠性以飞行器表面温度为可靠性特征量,本文假设飞行过程中飞行器表面温度基本保持恒定,因此防热产品的可靠性不会随飞行段落而变化,故此处只考虑隔热产品可靠性。在上述假设条件下,防隔热系统的可靠性框图见图4。

图4 防隔热系统工作可靠性框图
隔热产品的主要功能是在外壁存在高温的情况下阻止内壁温度升高,保护飞行器内部的设备,因此选择隔热产品内壁温度作为可靠性特征量。隔热产品的隔热性能统计特征可视为正态分布,因此,特定时间区段内隔热产品可靠度计算公式如下:
第1步:计算tR:
(7)
式中:x为特定时刻隔热特征点温度、U为飞行器落地时刻隔热特征点温度;Cvs为隔热产品置信度0.8下的变差系数,根据隔热产品的验收性能数据估计得到。
第2步:由tR查GB/T4086.1《统计分布数值表正态分布》,可得置信度为0.8的隔热可靠度下限RL(0.8),根据前述定义,有:
Pi_fore_fgr=RL(0.8)
(8)
2.4 测控系统可靠度计算
测控系统除无线安控误毁会导致飞行出现异常外,其余故障均不影响飞行,因此只需计算无线安控误炸的可靠性。与无线安控相关的主要设备包括飞行器测控终端、接收机和安全自毁系统,可靠性框图如图5。
图5 测控系统可靠度
测控系统与控制系统类似,同样主要由各类电子设备组成,失效模式属于指数分布特征,其可靠度与任务持续时间为减函数关系,计算公式如下:
(9)
式中:λck为与测控系统可靠性相关的常数,T为每个细分时间段的持续时间,t0为所关注飞行段的开始时间。
2.5 结构系统可靠度计算
结构系统主要起到在飞行载荷作用下保持飞行器外形、设备安装结构变形量在要求范围内且不发生破坏的作用。升力体飞行器飞行试验中的载荷峰值主要集中在助推段和着陆返场段。助推段的飞行试验安全性评估方法可采用传统评估方法,本文不再赘述;而另一载荷峰值集中在着陆返场段,残骸落区接近于落点,人口密集区域小而稀疏,不是本文分析重点。可见本文重点关注的助推结束到着陆返场开始之间的飞行段载荷低,一般相比高载荷飞行段低一个数量级以上,因此该段结构系统可靠性可视为1。
3 仿真校验
以某升力体飞行器飞行试验过程中飞行器故障残骸落入保护区A的概率计算为目标开展仿真。
3.1 弹道仿真计算条件
在升力体飞行器六自由度运动学与动力学模型基础上,根据飞行器质量特性、气动特性参数,考虑风、大气密度、气动特性、质量特性、导航误差等偏差量开展六自由度弹道仿真计算。
3.2 前后临界点的确定与子时段划分
首先,以未出现故障时的升力体飞行器质量特性与气动特性、以及助推段交班参数及偏差为输入,根据飞行打靶仿真结果,前临界故障点残骸散布中心与后临界故障点残骸散布中心之间的飞行时间为50s。将每5s划分为一个子时段,总计10个子时段。飞行器飞临前临界点时刻的飞行时间为200s。
3.3 子时段内故障概率计算
根据上述计算方法和各系统产品性能实测结果,可得到每个区段内的可靠性,见表1、表2与表3。

表1 控制系统在保护区相关概率
表2 测控系统在保护区相关概率
表3 防隔热系统在保护区相关概率
由此根据式(2~5)可得各子时段故障概率,见表4。
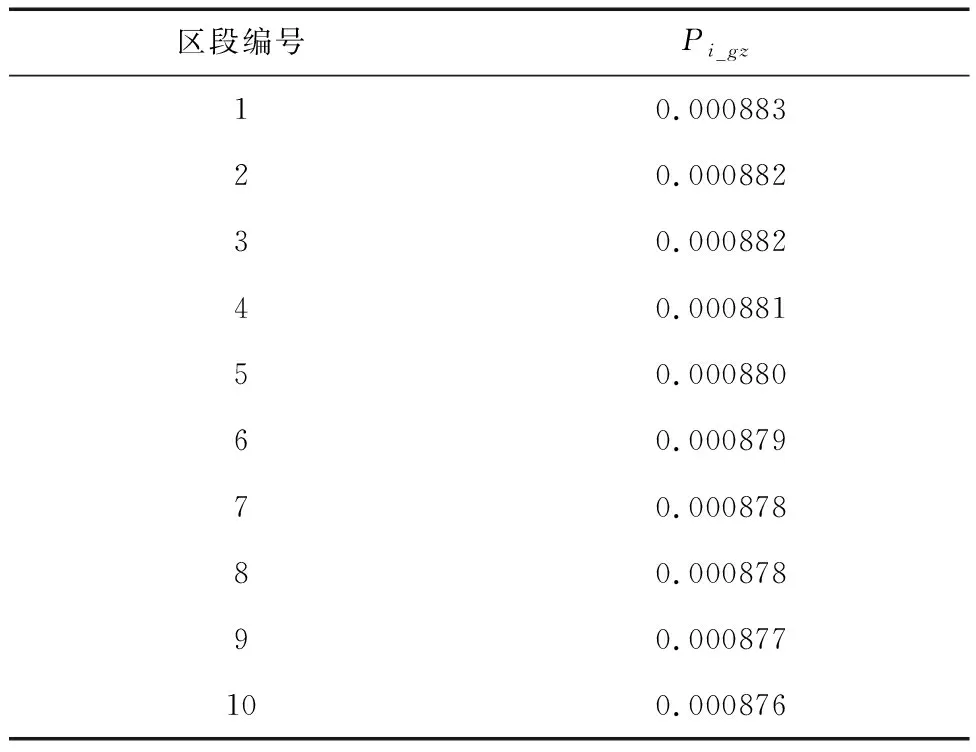
表4 飞行器在保护区发生故障概率
3.4 子时段内故障后残骸落入保护区概率计算
以未出现故障时的升力体飞行器质量特性与气动特性,以及助推段交班参数及偏差为输入,根据无偏差弹道计算结果确定每个子时段开始时刻的位置、速度、姿态标准值,根据蒙特卡洛打靶仿真结果确定相应偏差量范围。在此基础上,从每一个子时段开始时刻,根据执行安全自毁后飞行器残骸的质量特性、气动特性参数,以及质心与姿态运动参数范围,考虑3.1节所述偏差再次开展蒙特卡洛打靶仿真,获取残骸落入保护区A的概率,见表5。
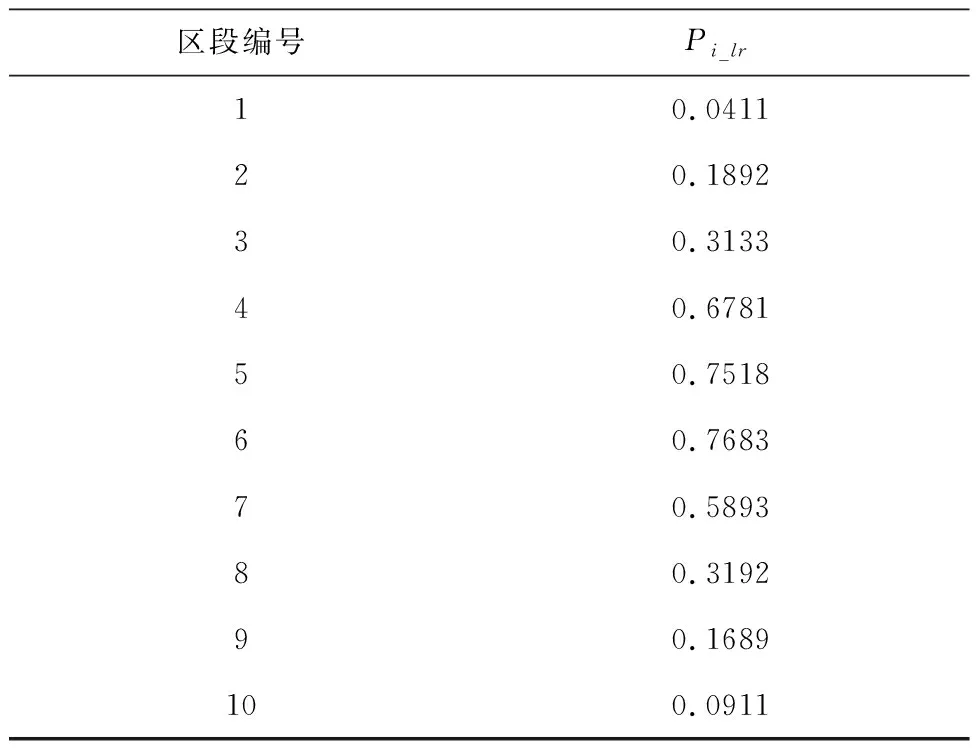
表5 飞行器故障后残骸落入保护区的故障概率
3.5 落入保护区总概率计算
根据公式(2)以及表4和5中的数据,可得落入保护区总概率为0.34%。
4 结论
提出了一种基于可靠性分时评估的升力体飞行器航区安全性风险精细评估方法。文中首先对飞行安全性问题进行简化与转化,将飞行器残骸在整个飞行任务中落入特定保护区的问题首先简化为特定时段内残骸落入保护区的问题,然后将之细分为若干子时段内飞行器出现故障和出现故障后落入保护区的概率计算。继而,通过飞行器可靠性建模,给出典型的升力体飞行器各系统在各子时段内出现故障概率的计算方法。最后给出了仿真算例。
相对于传统的基于故障树,或基于时间或航程线性折算可靠性的安全性分析方法,该方法根据飞行器产品的实测参数和使用剖面环境的实际情况定量计算故障概率,结合对飞行时段的细化分解,能够针对不同产品、不同飞行任务剖面、不同飞行时段给出细化的概率计算结果。该方法针对飞行器故障后残骸落入特定保护区域的概率计算,能够用于各类升力体飞行器的飞行试验安全性分析。后续还将开展飞行器多特征指标可靠性计算方法研究,从而提高飞行器故障概率计算的准确性。