基于反步滑模方法的高速飞行器动压控制
2023-05-12贾世伟顾嘉耀
贾世伟 张 进 顾嘉耀 张 诚 王 延
上海机电工程研究所,上海 201109
0 引言
与传统的飞行器相比,高速飞行器的飞行速度和高度跨度大,飞行环境变化也十分剧烈[1-5]。吸气式冲压发动机作为动力系统又使其增加了飞行动压、飞行姿态等约束条件。由于高速飞行器飞行环境复杂,其动态特性复杂多变,具有显著的不确定性,对控制系统要求十分严格,因此,控制系统需要在高速飞行器的不确定因素和外界干扰作用下,既要保证飞行器平稳飞行,又要对动压进行控制,这些复杂的特性要求控制器具有强的鲁棒性和适应性[6]。
反步法(backstepping)也称为反演法或者回馈递推法,是针对不确定系统将Lyapunov函数的选取与控制器的设计相结合的一种系统化的递归设计方法。反步法不要求非线性系统中的非线性必须满足增长性约束条件,并且系统的不确定性不必满足匹配条件或者增长性的约束条件。文献[7]提出了一种高速再入飞行器基于非线性反步法的鲁棒控制方法;文献[8]提出了一种基于自适应反步滑模控制方案的柔性航天器姿态跟踪鲁棒自适应容错控制方法,并且给出了该控制律使系统半全局输入到状态稳定的充分条件,使得闭环系统对任意干扰都具有鲁棒性;文献[9]研究了一种基于反步法的航迹角控制算法,设计的反步控制器每一层都由二次Lyapunov函数设计,最终仿真结果表明反步控制策略对纵向增程是有效的;文献[10]基于动态面反步法、神经网络及模糊自适应控制技术设计了姿态控制系统,且仿真结果表明所设计的控制系统对气动参数不确定和复杂的外界干扰有较强的鲁棒性。
滑模变结构控制的基本思路是根据系统的状态及其导数的误差生成控制量,使控制系统按照预期的滑模面运动,进而完成指令信号的稳定跟踪。自变结构控制的概念提出以来,国内外学者广泛展开了关于滑模变结构控制的相关理论和应用的研究。文献[11]设计并分析了一种多输入多输出自适应滑模控制器,且仿真结果表明所设计控制器对参数不确定性有较强的鲁棒性;文献[12]提出一种新的滑模控制方法—增益自适应滑模扰动观测器驱动的滑模控制,并通过六自由度仿真表明控制系统对外部扰动和建模不确定性等未知因素有较强的鲁棒性;文献[13]提出了一种新型神经网络滑模控制方法,有效地消除了控制器的抖振。文献[14] 针对抑制高马赫数飞行器纵向模型中的不确定性和外干扰并提高收敛速度,设计一种基于干扰观测器的滑模控制律。最后,通过仿真验证了滑模控制器是有效的,并且具有良好的鲁棒性能。文献[15]提出了基于动态逆和Terminal 滑模控制的制导/姿控一体化设计方法,实现了模型的反馈线性化和多通道解耦。文献[16]提出一种基于神经网络特征模型的自适应滑模姿态控制方案,进一步提高飞行控制系统的鲁棒性。文献[17]提出一种基于反演的动态面滑模控制方法,通过引入一阶滤波器以避免传统反演控制的“微分项膨胀”问题。
本文针对高速飞行器在飞行过程中存在的大不确定性以及冲压发动机工作过程中对动压的严格约束问题,提出了一种基于反步滑模的动压控制方法,实现控制系统在大干扰和大不确定性情况下对飞行动压的精确跟踪,确保了冲压发动机的稳定工作。
1 高速飞行器建模
高速飞行器动力学模型的建立是研究高速飞行器制导控制问题的基础。本节以高速飞行器为研究对象,建立飞行器制导控制系统模型,然后对模型进行精确线性化,为后续制导控制系统的分析和设计以及相关的仿真验证工作奠定基础。
运动中的高速飞行器是一个极其复杂的动力学系统。在推导运动方程时针对所要解决的主要问题,做出合理的简化。将固连于地球的地面发射系视为惯性坐标系,忽略地球的旋转运动和地球质心的曲线运动。忽略地球的曲率,视地平面为平面而不是球面,以便略去飞行器运动时对地球产生的离心加速度以及地球旋转和飞行器的线速度合成的哥氏加速度。认为地球是均质球体,引力g服从平方反比定律。并作出以下假设条件:
1)侧向参数及舵偏角是小量,并忽略各乘积的小量,以及侧滑角β,滚转舵偏角δx,偏航舵偏角δy对空气动力的影响。
2)飞行器基本在纵向平面内飞行。
3)俯仰舵的偏转仅取决于纵向运动参数;而偏航、滚转舵机的偏转仅取决于侧向运动参数。
得到描述飞行器纵向运动的方程组为:
(1)
利用反馈线性化方法可以忽略系统中的非线性项影响,非线性系统的反馈精确线性化的基本思想是通过精确的坐标变换和状态反馈将非线性系统动态全部或部分转换为线性动态。
选取状态变量为:x=[VθαH]T,分别是飞行器的速度、弹道倾角、攻角和高度,系统输入量为俯仰舵偏δz。式(1)中,将升力Y、阻力X、推力P以及俯仰力矩Mz采用曲线拟合的形式,表示为状态量α、V与系统输入量的多项式形式,具体表达式如式(2):
(2)
式中:q为飞行器动压,表达式为q=ρV2/2=ρ0e-βHV2/2,Sref和Lref分别为参考面积和参考长度。ρ为大气密度,ρ0为海平面大气密度,a0,a1,C0,C1,C2为发动机推力数据拟合系数,Mz为俯仰力矩,CX为阻力系数,CY为升力系数,CMz为俯仰力矩系数。
选择飞行动压q作为输出量,将高速飞行器的动压对时间进行连续求导:
(3)
通过求导发现,动压的一次、二次微分表达式中未显含控制量δz,当对动压进行三阶求导后,表达式中出现了状态量V的三次微分,而速度V的三次微分表达式中出现了控制量δz,因此飞行动压的相对阶为3。

(4)
式中:
(5)
(6)
(7)
(8)
(9)

(10)
由式(10)可知
(11)
因此可得
(12)
(13)
其中:

(14)

(15)
其中:
(16)
K=ρVd1
(17)

(18)

则该单输入单输出纵向系统的反馈控制输入为:
(19)
式(19)即为高速飞行器纵向模型反馈线性化后的逆系统模型,通过设计虚拟控制量可进一步实现对该系统的反馈线性化控制。
2 高速飞行器反步滑模控制器设计
2.1 反步滑模控制律设计
基于高速飞行器纵向精确线性化模型,选择系统的状态量为:
(20)
系统不确定性为:
Δx=[Δx1Δx2Δx3]T
(21)
其中不确定性存在已知上界Δx≤F=[Fq1Fq2Fq3]T。
建立飞行动压非线性系统:
(22)
设计控制器的目的是实现飞行动压精确跟踪指令,即期望动压值为qd=x1d。
定义一组滑模面
(23)
第1步:对Sq1求导,

(24)
设计虚拟控制律:
(25)
第2步:对Sq2求导,

(26)
设计虚拟控制律:

(27)
第3步:对Sq3求导,
(28)
设计实际控制律:

(29)
经过以上3步完成了高速飞行器纵向非匹配不确定非线性系统的动压反步滑模控制律设计,控制量为舵偏角δz。
2.2 反步滑模控制器稳定性分析
本节通过李雅普诺夫第二方法来分析系统的稳定性。
对第一个误差子系统Sq1选取Lyapunov函数为:
(30)
对Vq1求导,可得:

(31)
对第二个误差子系统Sq2选取Lyapunov函数为:
(32)
对Vq2求导,可得:

(33)
对最后一个误差子系统Sq3选取Lyapunov函数为:
(34)
判断其平衡状态的稳定性:

(35)
其中:-kmin=min{kq1,kq2,kq3}。
引入Barbalat定理,由式(35)可得:

(36)
3 反步滑模控制器仿真验证
对高速飞行器在巡航飞行时的速度和高度分别设定初值见表1。
表1 仿真初值设定
高速飞行器的结构参数有:质量m、特征面积Sref、特征长度Lref和z向转动惯量Jz,为验证反步滑模控制系统的鲁棒性能,仿真时在模型中加入这几个结构参数的不确定性,即
(37)
式中:m0,Sref0,Lref0和Jz0为结构参数的基准值,Δm,ΔSref,ΔLref和ΔJz为其不确定性,不确定性范围设置为|Δm|≤0.1m0,|ΔSref|≤0.1Sref0,|ΔLref|≤0.1Lref0,|ΔJz|≤0.1Jz0。
式(22)中的非匹配不确定项Δx1,Δx2和Δx3具有如下所示上界:
|Δx1|≤Fq1,|Δx2|≤Fq2,|Δx3|≤Fq3,Fq1=0.01,Fq2=0.01,Fq3=0.02。
设置动压指令值为qd=53500Pa。
选取动压控制器的参数为:
kq1=0.01,kq2=1.5,kq3=1.9,εq1=0.01,εq2=0.01,εq3=0.01。
仿真结果如图1~6所示:
图1 飞行器动压变化曲线
图2 飞行器速度变化曲线
图3 飞行器高度变化曲线
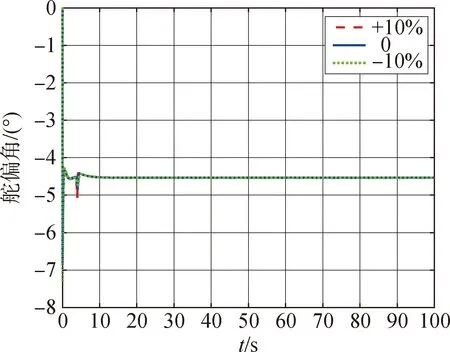
图4 飞行器舵偏角变化曲线
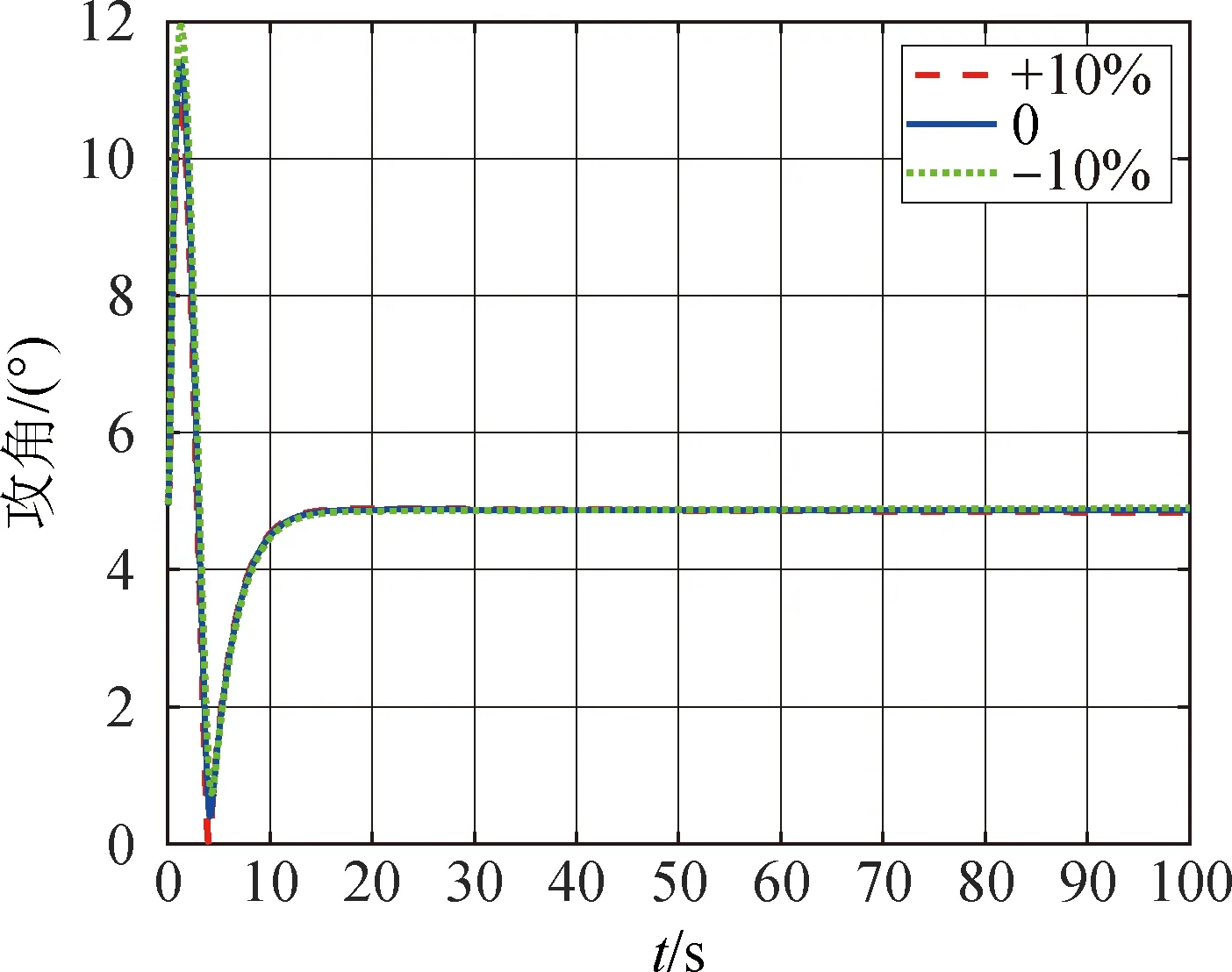
图5 飞行器攻角变化曲线
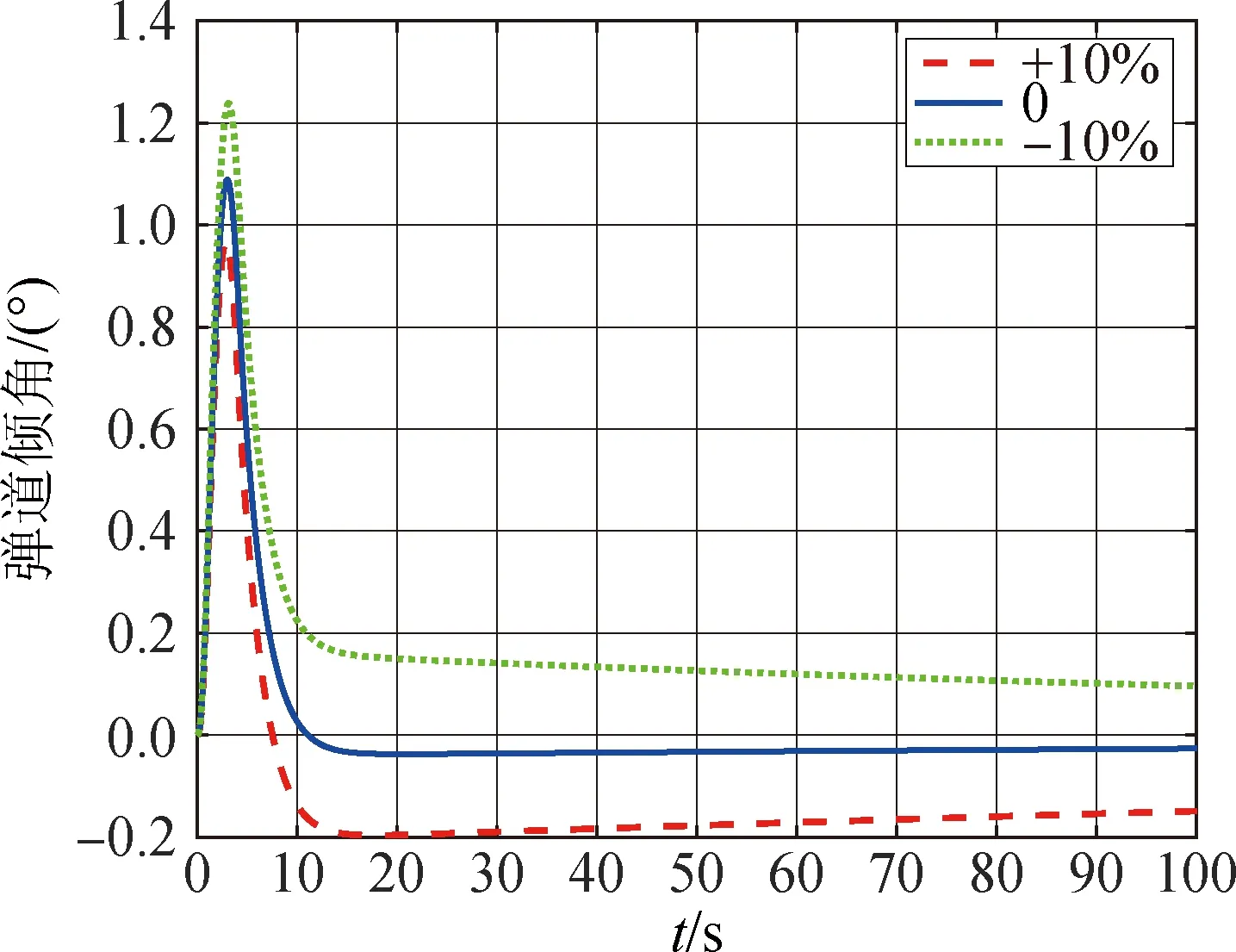
图6 飞行器弹道倾角变化曲线
从图1~6中可以看出,飞行器的飞行动压可以快速地到达期望值,并且能够稳定在期望值处,实现无静差的跟踪指令,且在对结构参数±10%拉偏的情况下,飞行动压仍能够精准地跟踪动压指令值。飞行器的舵偏角会在初始时刻发生剧烈变化,随后迅速在平衡点附近保持,用舵量较小,并且飞行器的攻角、弹道倾角均保持在稳态值,飞行状态稳定受控。
由仿真结果可知,所设计的反步滑模动压控制器效果良好,具有较好的跟踪能力和鲁棒性能。
4 结论
针对高速飞行器的非匹配不确定性和冲压发动机工作过程中对动压的严格约束问题,以高速飞行器为研究对象,通过精确线性化建立了飞行器的线性化模型,采用反步滑模控制方法设计了动压控制器,并对控制器的稳定性进行了分析,仿真验证了该控制器能够使飞行动压快速且无静差地跟踪动压指令,并且在结构参数存在不确定性的情况下控制器也能很好地跟踪指令,证明了控制器的有效性和鲁棒性。
