月面六足机器人机构设计与行走控制方法综述
2023-04-26王小涛崔宇新王卫军韩亮亮张崇峰
王小涛 张 震 崔宇新 王卫军 韩亮亮 张崇峰
(1.南京航空航天大学航天学院, 南京 211106; 2.上海宇航系统工程研究所, 上海 210019; 3.北京航空航天大学电子信息工程学院, 北京 100191; 4.中国航天科技集团有限公司空间结构与机构技术实验室, 上海 201109)
1 引言
月球是地球唯一的天然卫星,是人类探索宇宙的第一站[1]。自20 世纪50 年代,苏联发射世界上第一颗月球探测器月球1 号以来,除美国成功进行了6 次载人探测外,其余各国对月球的探测均为无人探测,开展了环绕、着陆、巡视等探测任务。着陆巡视探测能够多点、实地获取月球信息、开展原位分析工作,是月球探测最高效的探测方式之一[2]。
目前实际应用的星表探测机器人多为轮式,如中国玉兔号月面巡视器以及美国好奇号火星巡视器。轮式探测器速度快、效率高、承载能力好,但在松软地面或严重崎岖不平的地形上,其移动效率与通过性降低,越障能力偏低[3]。随着月球探测任务的深入,具有更多科学价值的坐标逐渐成为新的探测兴趣点,如可能存在水冰的月球南极阴影区[4]。此区域内地形复杂,存在岩洞、陨石坑、沟壑等复杂极端地形,对机器人的地形适应性提出了更高的要求。
当前,各研究机构提出将履带式、足式、翻滚、弹跳等新型移动机器人用于星表探测,目前多处于研发阶段[5]。在没有更多环境先验信息条件下,相比轮式机器人,足式机器人可以通过步态的变化适应多变地形,具有更好的灵活性和环境适应性,特别适应极端地形探测[6]。尤其六足机器人具有机构冗余、行走静态稳定的特点,是应对月面复杂地形高机动性移动的典型解决方案。然而六足机器人也存在结构复杂、控制难度大等问题,距离实际月面探测任务应用中尚存在一定差距。
本文调研了月面六足机器人的国内外研究现状,对制约其进一步发展的机构设计和行走控制方法等方面进行梳理和总结,以期为六足机器人在月面探测的实际工程应用提供参考。
2 月面六足机器人发展现状
2.1 国外发展现状
自20 世纪60 年代以来,以美国、德国等国家为首,世界各国纷纷开始六足探测机器人的研制,相继研发了各种不同类型的原理样机。
美国卡内基梅隆大学(Carnegie Mellon University ,CMU)很早便开展了对腿足式机器人的研究,研发了一系列星球探测机器人,如Ambler、Dante Ⅱ等。1988—1991 年,CMU 与美国喷气推进实验室(Jet Propulsion Laboratory,JPL)联合研制Ambler 机器人[7],如图1(a)所示,机器人的每条腿均为直角坐标式腿,借助腿内齿条调节机体竖直方向位置,以此跨越障碍。1992 年,针对星表大坡度陡峭地形的探测任务,CMU 研发了六足机器人Dante II,并在活火山上进行了实验[8],如图1(b)所示,Dante II 机器人每条腿能够独立地调整竖直方向高度,以适应崎岖地形,并且采用绳索进行牵引,使其能够在悬崖峭壁上进行上下攀爬。

图1 CMU 研制的探测机器人Fig.1 Probe robot developed by CMU
2005 年,JPL 研制了著名的ATHLETE 机器人,其第一代样机SDM 机器人被设想在月面运送大质量载人居留舱,如图2(a)所示,SDM 机器人采用轮腿复合结构,每条支腿具有6 个自由度,驱动轮安装在机械腿的末端[9]。2009 年,ATHLETE第二代样机T12 成功面世,如图2(b)所示,T12机器人由2 个三足机器人对接而成,每条支腿具有7 个自由度,运动比SDM 机器人更加灵活,负载能力也得到增强[10]。
2009 年,德国航天中心(Deutsches Zentrum für Luft-und Raumfahrt e.V.,DLR)基于Hand II机械手指设计了一款月面六足爬行机器人Crawler[11],如图3(a)所示,其被设想作为子机器人置于大型主机器人中,当主机器人难以到达相对危险的探测区域时,释放Crawler 机器人执行探测任务。

图3 德国研制的六足探测机器人Fig.3 Hexapod robot developed by German
2010 年,德国人工智能研究中心(German Research Center for Artificial Intelligence,DFKI)研制出一款专门用于月球空间探索任务的六足机器人SpaceClimber,计划观测、存储、分析陨石坑内部的科学样本[12],如图3(b)所示,该机器人共有26 个自由度,每条腿具有4 个自由度,头部和身体各有1 个自由度,以更好适应崎岖地形。在SpaceClimer 取得成功之后,DFKI 又提出了模块化可重构多机器人月面探测系统(Reconfigurable Integrated Multi - RobotExplorationSystem,RIMRES)的概念,研发了四轮腿机器人Sherpa 和蜘蛛式爬行机器人CREX,这2 个机器人子系统可单独工作,也可通过机电接口重构成一整体,进行协同作业[13]。如图3(c)所示,CREX 机器人继承了SpaceClimer 的设计,头部集成了视觉相机及激光雷达,利用其多冗余度特性实现在月球陨石坑等极端环境下探测工作。此外,DFKI 还制定了仿螳螂机器人MANTIS 的登月计划,如图3(d)所示,该机器人有4 条腿用于行进,剩余2 条腿采用了手腿复用的设计,既可用于辅助行走,也可作为机械臂执行空间操作任务[14]。
2.2 国内发展现状
20 世纪末,中国确定以“开展以月球探测为主的深空探测预先研究”为航天发展目标,众多高校和航天科研院所相继开展六足探测机器人的预研工作[15]。
2014 年,哈尔滨工业大学庄红超[16]基于昆虫结构设计了一款面向月面探测的大负重比六足机器人ELSpider,如图4(a)所示,ELSpider 机器人每条腿上有3 个主动自由度及1 个自适应自由度(踝关节上的被动球形关节),本体构型为圆形,可实现零半径转向,其负载能力远高于国内外同期多数六足机器人。此外,张赫等[17]研发了两代HITCR 机器人,以竹节虫为仿生对象,每条腿包含胫节、股节和基节,均采用高度集成的模块化关节,如图4(b)所示,HITCR Ⅱ机器人通过足端三维力传感器进行柔顺交互,提高了对月面崎岖地形的适应能力。

图4 哈工大研制的六足探测机器人Fig.4 Hexapod robot developed by HIT
上海交通大学高峰等设计了多款六足探测机器人,最具代表性的是Octopus 系列机器人和青骓机器人。Octopus 机器人单腿是一个3 自由度并联机构,如图5(a)所示,每条腿的脚踝处都有1 个被动的球形关节,这使其具有较高的承载能力、载荷重量比和刚度[18]。图5(b)所示为青骓机器人,该机器人采用直立姿态的机体布局,基于动态交替三角步态和地形自适应主动柔顺进行控制,并集成了语音识别、自主跟随等功能,可携带重型设备开展灾害现场救援作业[19]。在青骓机器人的基础上,上海交通大学与航天五院总体部合作,研制了一款探月六足飞跃器,如图5(c)所示,该机器人基于主被动复合缓冲原理的控制方法,实现了着陆过程的缓冲、身体稳定及着陆后的稳定行走[20]。

图5 上交大研制的探测六足机器人Fig.5 Hexapod robot developed by SJTU
此外,一些研究人员提出了变构型六足机器人的概念。北京航空航天大学丁希仑等针对星表探测任务,研制了一系列NOROS 六足机器人。最新一代NOROS 机器人的6 条支腿均匀分布在圆形机体周围,每条腿具有3 个主动自由度和1 个主动轮的转动自由度,如图6(a)所示,该机器人将主动轮安装在膝关节位置,通过改变小腿构型实现足式与轮式的切换,并可减少足式移动时轮子与地面接触磨损[21]。上海宇航系统工程研究所张元勋等[22]模拟摩洛哥蜘蛛的行为,提出一种兼有快速通过性和良好环境适应性的爬行滚动一体化机器人方案,如图6(b)所示,该机器人通过6 条腿的形态变化,具有爬行和滚动2 种运动模式,可探索月球熔岩管等极端区域。

图6 可变构型六足探测机器人Fig.6 Hexapod robot with variable configuration
除上述六足机器人外,研究人员还研制了一些针对星表探测的四足机器人,这些四足机器人可靠性良好,并展现出优越的动态性能,对月面六足机器人的机构设计和行走控制等方面具有借鉴意义。苏黎世联邦理工学院针对低重力天体的探测任务,专门开发了SpaceBok 四足机器人,如图7(a)所示,该机器人每条腿有2 个自由度,采用1 组平行机构进行传动,以减少腿部惯量,并使用弹性元件吸收和存储能量,保证机器人实现优异的跳跃性能[23]。DFKI 研制了一款仿黑猩猩探测机器人Charlie,如图7(b)所示,其最大特点是可根据不同地形自主切换运动模式,平坦地形采用双足方式行走,复杂地形则切换为四足爬行模式以提高稳定性[24]。此外,波士顿动力公司(Boston Dynamics,BDI)研制的Spot mini 机器人近期也被提出应用于火星洞穴探测等复杂星表探测任务。该机器人采用纯电驱动,可以轻松地穿越复杂地形,其仿生动作非常流畅,并可实现多机协作[25]。
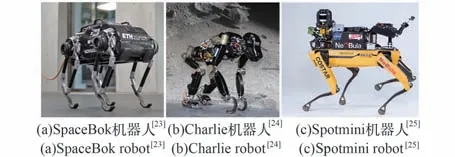
图7 典型探测四足机器人Fig.7 Typical quadruped detection robot
3 月面六足机器人机构设计现状
月面六足机器人是一种仿生机器人,仿生机构的设计很大程度上影响机器人整体的运动性能和稳定性。本文从单腿机构设计、多足布局方式及足端构型设计3 个维度梳理和总结了目前主流的六足机器人机构设计方案,为月面六足机器人的机构设计提供可行方案参考。需要说明的是,由于四/六足机器人的腿部构型可相互借鉴,因此下文单腿与足端构型分析包含部分典型四足机器人。
3.1 单腿机构设计
机械腿是多足机器人自身的一个重要组成部分,其设计优劣直接影响到机器人的能量效率、行进速度和灵活性等。研究人员从仿生学的角度出发,从单腿自由度分配、传动方式及串并联类型等维度展开深入研究,设计出了多种不同的单腿形式。
从单腿机构自由度来看,一些地面足式机器人采用了1/2 自由度单腿设计,如图8(a)所示,六足弹跳机器人RHex 的单自由度C 形腿[26],图8(b)所示Doggo 机器人的2 自由度5 杆同轴腿[27]。然而,1/2 自由度腿的足端运动范围并不能覆盖一个三维空间,因此现有的月面六足机器人单腿一般在3 个自由度以上,部分机器人单腿自由度甚至达到了6 个。

图8 单腿1/2 自由度的多足机器人Fig.8 One or two DOF single leg robot
此外,在驱动传动方式上,目前有3 类主流的方案:①将电机直接置于关节处进行驱动,如图9(a)所示的SpaceClimber 单腿,直驱的优点在于膝关节处的转动角度更大,小腿有更大的运动空间,但由于关节模块往往较重,因此小腿的转动惯量较大,对根关节电机的转速和输出力矩有较高的要求;②将膝关节电机上置至髋关节处,两电机同轴心布置,采用一组平面四连杆机构链接上置电机和曲柄,电机转动带动曲柄,促使膝关节产生运动,如图9(b)所示的青骓机器人单腿,该构型大大减小了快速运动时腿部离心力和科氏力,有利于腿部快速摆动,但连杆机构会限制膝关节的活动范围,所以在设计时需要对膝关节的运动空间进行额外分析;方案③与②类似,区别在于使用同步带进行牵引力的传动。由于带传动的特性,此构型在缓和振动载荷和抑制冲击等方面有不错的效果,能更好实现机器人高动态性,但带传动可能存在皮带磨损、打滑等可靠性问题,因此常见于轻量化四足机器人,如图9(c)所示的MIT Cheetah mini 机器人[28]。

图9 单腿传动方案Fig.9 Single leg transmission scheme
从串并联类型的角度来看,上述机械腿均为串联式或混联式,也有部分研究人员对并联式机械腿展开了研究。上海交通大学孙乔等研制了Hexbot 系列机器人,如图10(a)所示,Hexbot-IV机器人单腿的上半部分是一个三支链并联机构,包含1 个转动通用(RU)分支和2 个转动通用球形(RUS)分支,下半部分为仿哺乳动物腿的Z 字形腿部骨架。北京理工大学陈志华等[29]研制了NAZA 机器人,如图10(b)所示,该机器人单腿由Stewart 平台倒置而来,在动平台上增加车轮驱动装置,可实现轮式、足式的复合运动。一般来说,串联式和混联式机械腿结构紧凑,运动灵活,不足之处在于承载能力较小;而并联式机械腿刚度大,承载能力强,但结构相对复杂,足端工作空间小,移动缓慢。

图10 并联腿方案Fig.10 Parallel leg scheme
3.2 足端构型设计
月球表面覆盖着一层松软的月壤,当六足机器人单腿处于支撑相时,月壤表层刚度难以支撑机器人本体载荷,足端沉陷几乎是不可避免的,如波士顿动力公司的ATLAS 机器人在雪地斜坡上行走时,本体载荷使足端发生沉陷[30]。为了解决这个问题,研究人员试图对足端构型进行拓扑优化,使足地接触力得到有效控制。现有的月面六足机器人足端大致可以分为常规足、轮式足及仿生足3 类。
常规的足端构型包括平底足、球形足、曲面足及C 形足等。平底足式如图11(a)所示,其构型简单,底面多采用矩形或圆形,可携带较大的载荷重量,但步速偏慢,一般应用在一些仿生昆虫六足机器人上,如ELSpider、MANTIS 机器人。球形足应用最为广泛,在四/六足机器人上经常可见,如图11(b)所示,球形足可以从各个方向与地面接触,与平底足相比具有优异的动态性能,但负重能力较弱,常被用于仿猎豹、狗等哺乳动物的机器人上,如Cheetah mini 机器人、青骓机器人等。此外,部分机器人使用了曲面足,如图11(c)所示的SpaceBok 机器人,曲面足承受冲击和跨越障碍的能力较强,且能量的循环利用率较高,但缺点是承载不足,可能会发生变形。C 形足可以看成一类特殊的曲面足,如图11(d)所示,该构型的腿部和足部合并为一个整体,在支撑躯体和水平牵引性能上均有良好的表现,在材料的弹性变形范围内承受冲击和跨越障碍的能力较强,且能量的利用率较高,但采用C 形足方案的机器人单腿只有1个自由度,灵活性欠佳。

图11 常规足端构型方案Fig.11 Conventional foot configuration
轮腿式是一类特殊的足式机器人,可以归为足端构型的一种。现有的轮足组合方式主要有3种:①轮为足式。将车轮直接安装在机器人腿的末端,如图12(a)所示的ATHLETE 机器足,车轮锁定时可直接当作机器人的足。在月面平坦地形下,此类机器人可有效利用轮式滚动的高速特性;在陡坡、沟壑等地形下,锁定轮轴将轮部作为输出力矩的转动关节,采用步行模式可以大大提高地形适应性,但在步行模式下,车轮的某一局部长时间与地面摩擦,会造成车轮表面不规则的磨损。②轮足可变形式。如图12(b)所示的LEON 机器人[31],该机器人通过重构方式实现轮腿切换,当其伸展开来是普通的串联腿,当其折叠时变成环形结构,以轮式滚动。这种特殊的轮足配置对加工制造的精度要求很高,且地形适应性相对有限。③轮足切换式。如图12(c)所示的NOROS 机器人,该机器人将车轮安装在机器人的膝关节位置,当机器人站立步行时,轮子不会与地面接触,当机器人小腿折叠时,轮子与地面接触,便可以实现轮行。

图12 轮式足构型方案Fig.12 Wheel foot configuration
以上所述的足端构型都是非奇异的,然而也有少部分机器人受仿生学启发,采用仿生的奇异型足端。仿猩猩机器人Charlie 的后肢采用跖行足结构(图13(a)),足趾、足弓以及足跟周围安装了高密度阵列传感器,设计较为复杂[32]。仿壁虎爬行机器人 StickyBot 的足部具有四趾(图13(b)),足体材料为带有刚毛和匙突结构的柔性聚合物薄板[33]。在不同的落地阶段,足掌、足趾与硬质地面产生分层的粘附作用。值得注意的是,不同于常规足端构型与地面的平动接触,采用奇异型足端构型的移动机器人与地面的接触以不同姿态的旋转接触为主,其稳定性一般优于常规足,但结构复杂,可靠性偏低。

图13 仿生足构型方案Fig.13 Bionic foot configuration
3.3 多足布局方式
目前,月面六足机器人的多足布局有2 类主流形式。早期研究人员受仿生原理启发,模仿蜘蛛、竹节虫、螳螂、蝎子等爬行类昆虫的特征,将根关节与机身竖直安装,采用类昆虫的爬行步态行进。这种形式下的布局方式有六腿均匀分布和左右轴对称分布2 种。
六腿均匀分布如图14(a)所示,机器人的6 条腿间隔60°均匀分布在本体周围,本体为六边形或圆形。这种布局具有各向同性和对称性,这种对称优势使六足机器人可以拥有更多的前进方向,具有较好的转向能力,可实现零半径转弯;其缺点是每条腿自身所处的运动平面都不平行,要实现协调运动步态,每条腿的运动姿态和参数都不相同,控制函数相对复杂[34]。典型的六腿均匀分布机器人有北航NOROS 系列机器人和哈工大ELSpider 机器人等。另一种布局方式如图14(b)所示,将6 条腿分为2 组,安装在机器人本体的两侧,每侧3 条腿。该布局下机体的中轴线多为优势前进方向,当机器人沿该方向行走时,各腿可以利用最大的工作空间。此布局的优点是每条腿自身所处的运动平面相互平行或对称,较易实现6 条腿之间协调运动,缺点是机器人转向性能较差,需要先通过步态调整躯干方位,增加了步态规划的难度。

图14 仿昆虫式布局Fig.14 Insect layout configuration
近年来,仿生四足机器人展现了优越的动态性能,受此影响,部分研究人员不再将六足机器人局限在模拟昆虫的行为上,而是试图在六足机器人平台模拟四足动物的运动特性,青骓机器人是其中的代表。研究人员将单腿的根关节水平安装,形成一个侧摆自由度,从而模拟四足哺乳动物单腿构型。这种设计下,机器人的六足分布产生了多种可能性,包括“222”布局(图15(a))、“前3后3”布局等,后者按照四足机器人领域一贯的定义,可以进一步分为内膝肘式(图15(b))、全肘式(图15(c))、外膝肘式(图15(d))等。在四足机器人领域,研究人员对内膝肘式、全肘式、外膝肘式等构型布局进行了多方面的对比研究,三者在能耗、稳定性、关节力矩等方面各有不同。然而,六足机器人学界关于此类布局间的对比研究却不多,需要进一步加以探索。一般来说,外膝肘式和内膝肘式的支撑面比较大,机器人的稳定性比较好;全肘式由于具有统一的关节形式,控制相对简单。

图15 仿哺乳动物式布局Fig.15 Mammalian layout configuration
4 月面六足机器人行走控制现状
月球重力仅为地球的1/6,表层松软的月壤与常规路面的力学特性存在很大差异,导致月面六足机器人的足地接触力模型与地面机器人大相径庭,可能会发生足端打滑和冲击过大等问题。此外,月球表面遍布岩洞、陡坡、沟壑及陨石坑等极端地形,六足机器人极易发生倾覆,这对其行走控制提出了更高的要求。因此,不同工况下的步态规划与切换、低重力环境下足力的分配与柔顺,是决定六足机器人能否在月面环境下稳定行走的关键和核心技术。
4.1 步态规划与切换
机器人运动时的腿间协调由步态保证,因而步态规划对机器人运动的稳定性具有重要影响。目前研究人员对六足机器人的步态规划问题进行了大量研究。McGhee 等[35]系统地给出了描述足式机器人步态的数学定义,现有六足机器人的数学描述大多由此而来。Gao 等[36]采用三角、对角和波浪3 种行走步态解决六足机器人的低能耗运动要求,图16 为3 种步态的时序图。另有研究人员 讨 论 了 爬 坡、越 沟、爬 梯 等 特 殊 步 态[37],Furusho 等[38]、Estremera 等[39]以及Papadopoulos等[40]通过启发式方法设计奔跑、爬坡等步态。在这些研究中,机器人均采用固定步态进行运动。其中,三角步态应用最广泛,此步态下机器人始终有3 条腿处于支撑相,占空比为0.5,控制简单且高效,因此现有的月面六足机器人大多将此设置为基础步态或平坦地形下的常用步态。

图16 六足机器人步态时序图[36]Fig.16 Gait sequence diagram of hexapod robot[36]
然而,仅依靠某一种或几种规划好的规则周期步态无法满足月面行走需求,研究人员提出了自由步态的概念以适应崎岖地形。现有的自由步态规划方法包括基于局部规则的步态规划、CPG网络、强化学习[41]等。Cruse 等[42]通过对竹节虫的研究,提出了作用在腿间的6 条基本规则,生成适合于机器人行走的自由步态,并满足了六足机器人的稳定性。Fukuoka 等[43]采用Matsuoka 神经振荡器模拟CPG 信号,将控制算法成功地应用于Tekken 机器人上,实现了在崎岖地形中的行走。Hwangbo 等[44]提出了一种神经网络的训练和移植方法(图17),使四足机器人ANYmal 获得了比以往更快的奔跑速度和更有效的防跌倒的能力,同时兼具了计算的高效性和高能效性。然而,目前的自由步态规划方法大多存在参数相互耦合、不易调节、难收敛、仿真移植性差等问题,在月面六足机器人实物样机中的应用并不多。

图17 ANYmal 机器人训练过程[44]Fig.17 Training process of ANYmal robot[44]
针对不同月面地形,研究人员提出了步态切换的概念,即在不同路况选用相应步态以提高效率。与步态规划相比,步态切换方面的研究相对较少。目前六足机器人的步态切换策略主要是先对不同的场景建立多种控制模型,然后基于时序和向量表对步态模式进行选择。
Yu 等[45]利用多尺度法对系统方程进行求解,利用收缩理论和梯度理论设计了CPG 步态生成器,实现了六足机器人的步态生成和切换。Mao 等[46]提出一种基于稳定性和干扰准则的六足机器人在连续不可微地形上的步态切换方法,并在Hexa-XIII 机器人上进行了仿真和实验,如图18 所示,实现了45°以上高难度楼梯上的步态切换。通过生成不同的步态模式,六足机器人的稳定性比仅使用三角步态时更高,其生成的爬楼梯步态拓扑包括3-3 步态、2-4 步态和1-5步态。

图18 Hexa-XIII 机器人爬楼梯的步态切换过程[46]Fig.18 Gait switching of Hexa-XIII when climbing stairs[46]
此外,对于机器人可能发生的倾覆问题,研究人员提出了倾覆恢复步态的概念。北京航空航天大学的NOROS 机器人规划了一种倾倒恢复步态,利用其机身关于水平面对称的特性,直接改变机身的上下面,实现倾倒恢复,如图19 所示。这种步态切换策略极大地提高了机器人在极端地形行走的恢复能力。总的来说,目前的步态切换策略大多控制模型复杂,步态切换需要停下或者切入点固定,难以实现自由、平滑的切换,需要进一步探究。

图19 NOROS 倾覆恢复过程Fig.19 Overturn recovery process of NOROS robot
4.2 足力分配与柔顺
六足机器人实际的足端接触力在不加控制时呈现出不规则、不合理的力分布,最直观的表现是位于支撑相的足端相互之间存在内力对抗,很容易导致个别腿的关节力矩过大,造成结构破坏以及足端打滑等问题。为了有效控制足端接触力,首先要将地形环境约束、驱动力约束及运动约束等作为输入条件,对足端目标进行牵引力的分配;然后在足力分配的基础上,结合关节力矩和位置等信息,进行足端力的柔顺控制。整个流程如图20 所示。

图20 足端力控制流程图Fig.20 Flow chart of foot-end force control
对于机器人足力分配优化的研究已开展多年,最初研究人员以足力的平方和最小为优化目标,如1986 年Waldron 等[47]在ASV 机器人的研发中将足间内力最小化作为目标函数,并取得了不错的效果。然而,在足式机器人中,内力最小的需求并不像类似机械手抓取操作中那样重要,因此此类目标函数足力分配方案并不常见,研究人员逐渐将重点放在如何节约机器人的能耗方面。如Vidoni 等[48]通过对足式机器人腿部构型的分析,得知通过足端力及关节力矩的合理分配可以最小化站立姿态的能耗。罗庆生等[49]通过简化的足力分配模型对能耗问题进行探讨,并应用于仿生蟹的研究。从机器人的设计角度来看,这些目标函数的选取更加具备现实意义。
在足力的解算方法方面,逆伪法是最早使用的一种足力分配算法,解算速度快,但最大的问题是仅仅考虑了等式约束,无法对不等式约束进行处理,因此无法保证解的有效性。后来,研究人员使用线性规划法进行足力解算,将目标函数及约束都转化成线性求解方式,但此种方法求解不等式约束时求解不连续,有很大局限性。目前,二次规划法是最主流的足力分配算法,将目标函数定义为二次函数,可以添加等式和不等式约束,从而满足足力分配的复杂性要求。如Marhefka 等[50]建立了足式机器人的直流电动机模型,通过二次规划法求解以减小机器人能耗为目标函数的优化问题。哈尔滨工业大学王冠宇等[51]提出一种分步二次规划算法,该算法以足端法向力约束、关节力矩约束和摩擦锥约束为约束模型,以减小最大牵引系数为目标函数,提高了ELSpider 六足机器人的爬坡能力,图21 为该机器人的爬坡试验。

图21 ELSpider 爬坡试验[51]Fig.21 Climbing test of ELSpider robot[51]
在机器人柔顺控制领域,力/位混合控制和阻抗控制是经典的柔顺控制方法,最早应用与机械臂领域。其中,力/位混合控制是一种直接力控制,适用于同时分别在不同方向实施力控制和位置控制,例如切削、抛光等操作场景。
与力/位混合控制不同,阻抗控制被认为是一种间接力控制策略,通过调节机器人末端的刚度、阻尼和惯量,使力与位置满足期望的动力学关系,这一特点与足式机器人落足过程相适应,所以在四/六足机器人柔顺控制中应用尤为广泛。阻抗控制按照不同的内环控制方式,可以分为基于力的阻抗控制和基于位置的阻抗控制2 种。
基于力的阻抗控制的思路为通过机器人腿部装配的位移传感器检测足端位置,结合足力分配环节得到的足端期望力,利用力控制信号进行修正,进而模拟期望阻抗效果,因此这种控制策略特别适用于机器人足端位置变化比较明显的场合,如液压机器人、装配了可伸缩式弹簧腿杆的机器人。这类机器腿具有一定弹性,在足地交互过程中,落地瞬间产生的接触力会使机器腿反弹,利用模拟出的期望刚度和阻尼可以有效缓解整个系统的冲击力。如BDI 的LittleDog 机器人以逆动力学模型为基础,采用基于力的阻抗控制,实现了机器人斜坡、有裂缝的岩石、圆形岩石和圆木等各种未知地形下的稳定行走,具有强大的地形适应能力[52]。意大利技术研究所(Italian Institute of Technology,IIT)的电液混动四足机器人HyQ 在阻抗控制的基础上引入动力学补偿环节,减小机器人腿部重力和惯性力对阻抗控制的影响,实现了小跑、谐振跳、蹲跳着陆等步态,其控制框图如图22 所示[53]。

图22 HyQ 阻抗控制框图[53]Fig.22 Impedance control diagram of HyQ[53]
另一种阻抗控制方法为基于位置的阻抗控制,也称为导纳控制,主要思路为通过机器人腿部安装的力传感器获取足端力,结合期望位置,利用位置控制信号进行补偿,从而模拟期望的阻抗效果,因此该方法需要实时检测机器人受力情况,通过所受外力来调整位置的变化,特别适应于足端受力变化明显的高刚度系统。如DLR-Crawler 机器人足端配备了六维力传感器,通过位置阻抗控制有效降低了足端冲击力。日本千叶大学Irawan等[54]针对六足机器人COMET-IV 提出了单腿阻抗控制和基于质心的阻抗控制方法,实时调整机器人质心和身体姿态,如图23 所示,实现了在柔软地形上的行走。此外,研究人员还将鲁棒控制、自适应控制及模糊控制等先进控制方法与阻抗控制相结合,应用到六足机器人的足力柔顺控制之中。Galvez等[55]将位置阻抗控制与PID 控制相结合,应用于SILO4 电驱动步行机器人中,在没有摩擦力补偿的情况下依然得到了较好的位置跟踪和足力响应特性。Palis 等[56]首次提出了一种基于环境参数估计的方法,对阻抗控制参数进行调整,实现了机器人在不同刚度地面的稳定行走。朱雅光[57]提出一种自适应-模糊的柔顺控制算法,通过模糊控制器对自适应控制器的参数进行在线修正,以减少外部环境对足端接触力的影响,从而提高六足机器人对不同环境的适应性。

图23 COMET-IV 在草地上行走[54]Fig.23 COMET-IV walking on the grass[54]
5 结束语
世界各研究机构设计了多种应用于月球探测的六足机器人,目前多停留在概念设计或原理样机试验阶段。针对工程应用的推进需在以下方面加大研究:
1)提高机构的可靠性。六足机器人的强地形适应能力依赖大量的自由度,在机构复杂程度上高于轮式机器人和履带式机器人,这无疑造成了六足探测机器人可靠性偏低,工作性能不稳定等问题,成为限制其在月球探测工程中实际应用的一个重要原因。因此,在满足探测任务需求的前提下,尽可能简化六足机器人的机构复杂度,做好月面环境下多自由度机构的防护,提高机器人的硬件可靠性,是未来进一步研究的重要方向。
2)提高控制的稳定性。现有月面六足机器人的连续稳定运动大多基于离线的步态规划,即按照预先设定好的步态模式进行运动,缺乏自主性和智能性,无法自主地解决足端沉陷、倾倒恢复等问题。此外,六足机器人特有的步态规划、足端接触力、主动柔顺等控制环节比传统的轮式、履带式探测器复杂得多,这对整个控制系统的设计提出了更高的要求。因此,探索更多高效、智能的步态规划与切换、足力分配与柔顺等行走控制方法,是亟需解决的关键问题。