四足步行机动平台半圆柱形足端偏差分析
2019-05-23韩寿松陈亮亮陈绍山
韩寿松, 李 勋, 王 飞, 陈亮亮, 陈绍山
(陆军装甲兵学院车辆工程系, 北京 100072)
目前,大部分四足步行机动平台行走稳定性控制算法仍然采用位置控制方式[1]。在此方式下,半圆柱形足端的圆柱半径越大,步行机动平台对非结构性地形的适应性就越强。但随着半圆柱形足端圆柱半径的增大,机动平台行走过程中足端与地面的接触点会发生大范围的变化,因而产生较大的地面冲击,对步行机动平台的稳定性产生影响[2]。因此,足端轨迹偏差问题是影响机动平台行走能力的重要方面。由于四足步行机动平台由结构完全相同的四足实现运动,所以足端轨迹偏差问题最终可归结为单腿坐标系中的足端位置偏差问题。
GUARDABRAZO等[3]对仿昆虫类步行机动平台半球形足端与地面之间的偏差问题进行了研究,运用正逆运动学分析方法对步行机动平台在二维平面中运动的误差进行了补偿。陈诚[4]在GUARDABRAZO研究的基础上,对六足步行机动平台半球形足端支撑相滚动造成的偏差进行了分析,其假设足端与地面之间无滑动,利用理想落足点与实际落足点的偏差对运动学分析结果进行了修正,同时针对计算过程中理想落足点与实际落足点之间的偏差无法直接获得的问题,采用了修正前关节转角估计的方法;陈刚[5]针对关节转角估计修正方法只能适用于平坦地形的问题,在综合考虑足端理想轨迹及机动平台机身理想姿态的基础上,利用位姿闭环控制对足端轨迹的偏差进行了修正,采用了该修正算法的步行机动平台不仅适用于平坦地形,也适用于复杂地形。笔者对四足步行机动平台进行了运动学分析和足端轨迹规划,重点对半圆柱形足端偏差问题进行了分析,提出了运用足端轨迹目标规划点(Objective Progamming Point,OPP)与实际规划点(Actual Programming Point,APP)的相对位置关系进行误差分析的方法,并对足端APP和OPP在4种相对位置[6]下的偏差问题进行了分析。
1 四足步行机动平台运动学分析及足端轨迹规划
1.1 四足步行机动平台机械结构
四足步行机动平台的机械结构模型如图1所示,机动平台四条腿的结构完全相同,每条腿均存在髋侧摆关节、膝关节和踝关节3个主动自由度,其中髋关节控制机体侧向摆动,膝关节和踝关节可进行前后摆动[7]。
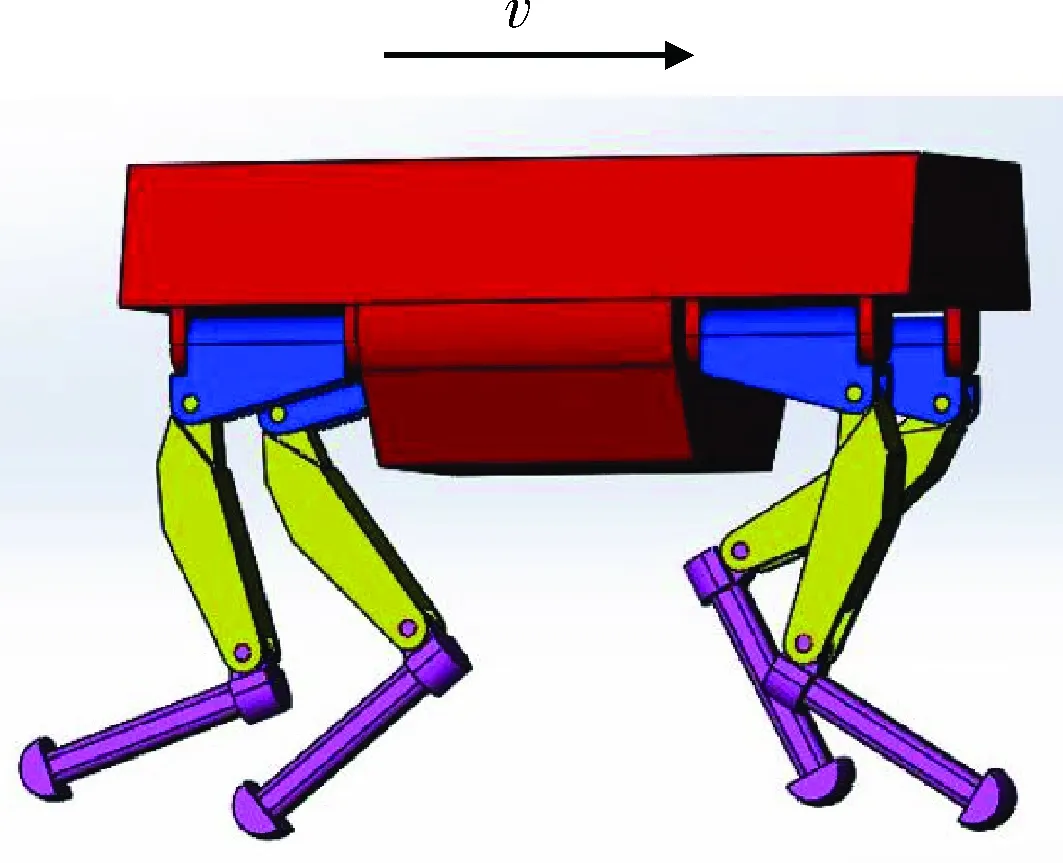
图1 四足步行机动平台机械结构模型
由于步行机动平台四足机械结构完全相同,所以笔者仅对机动平台的右前腿进行分析,将其物理结构进行简化,如图2(a)所示。在机动平台达到稳定行走阶段时,其髋侧摆关节仅在一定范围内做周期性运动,所以将右前腿向单腿平面简化,如图2(b)所示。选择机动平台足端半圆柱的轴线在单腿平面内的投影点(图2(c)中黑点)作为足端轨迹的OPP。
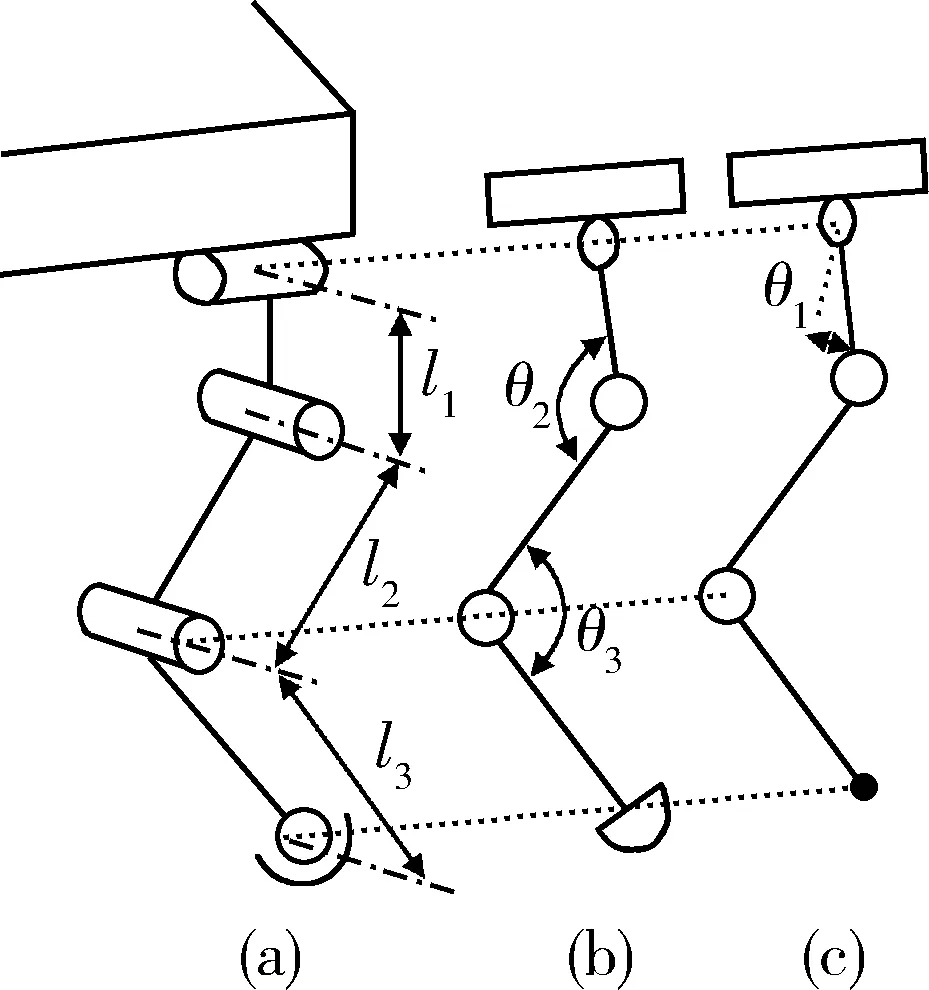
图2 单腿简化模型
1.2 四足步行机动平台单腿正逆运动学分析
选用D-H(Denavit-Hartenberg)参数法对右前腿进行正逆运动学分析[8],并建立如图3所示的各坐标系。其中o0x0y0z0为基坐标系,固连于机动平台机体,z0轴沿关节的旋转方向,x0轴竖直向下。o0x1y1z1、o2x2y2z2、o3x3y3z3分别为机动平台关节1、2、3处的坐标系,其中zi(i=1,2,3)轴沿关节的旋转方向,xi轴沿杆i的方向向下。o4x4y4z4为足端坐标系,其各轴方向与o3x3y3z3坐标系相同。
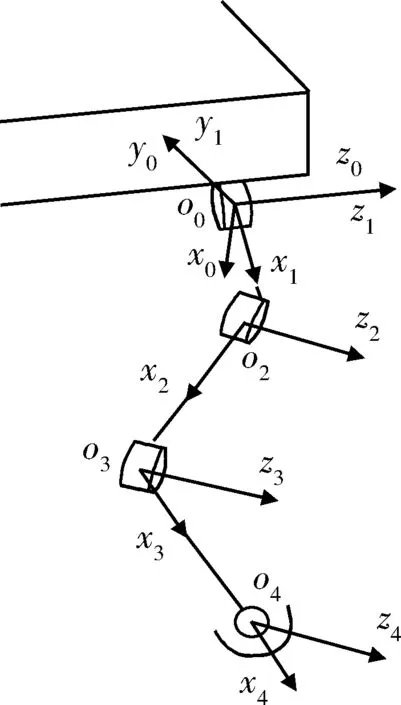
图3 右前腿D-H坐标系
运用D-H参数法通过计算得到足端相对于基坐标系的位置为
(1)
假设足端轨迹APP相对于OPP的坐标为(Δx,Δy,Δz)T,代入式(1),并反向求解,可得
(2)
(3)
(4)

1.3 四足步行机动平台足端轨迹规划
机动平台的足端轨迹有多种形式,常见的阻断轨迹形式有摆线轨迹、多项式轨迹及直线轨迹等[9-11]。本文选用修正后的摆线轨迹进行机动平台足端轨迹规划。假设机动平台单腿绝对步长为L,腿高为H,步态周期为T,占空系数为β,则腿部摆动相的时间为
Tw=(1-β)T。
(5)
足端摆动相水平方向的轨迹为
(6)
足端摆动相竖直方向的轨迹为
(7)
2 四足步行机动平台足端偏差的产生
理想状态下,四足步行机动平台实际足端轨迹应当与理想足端轨迹重合,如图4(a)所示。但在前期四足步行机动平台仿真及试验中发现:实际足端轨迹与理想足端轨迹相比,步行机动平台机体主要存在如图4(b)、(c)所示的偏差状况。
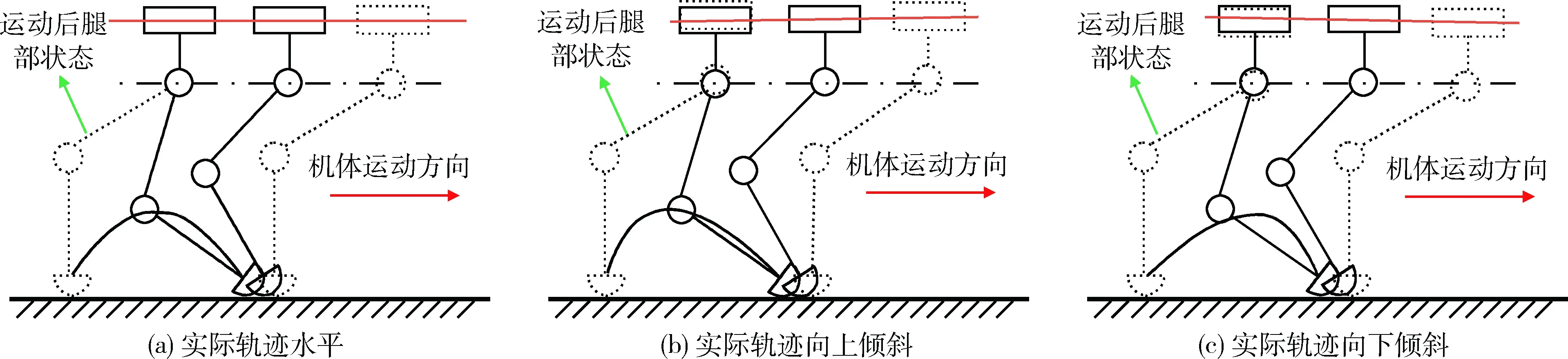
图4 步行机动平台偏差状况
由图4可知:机动平台行进中,由于半圆柱型足端沿地面的滚动及偏差等原因会导致实际足端轨迹偏离理想足端轨迹。在摆动相阶段偏离理想足端轨迹将会导致机动平台无法实现越障;在摆动相与支撑相过渡阶段偏离理想足端轨迹,机体容易受到足端与地面间较大冲击力影响,产生机体稳定性问题。
3 四足步行机动平台足端偏差分析
定义理想的足端轨迹规划点为目标规划点(OPP),实际的足端轨迹规划点为实际规划点(APP)。理想情况下,APP应与OPP重合。但由于腿部杆件、关节转角等误差因素存在,现实中足端轨迹的APP偏离OPP,且此偏差不仅发生在竖直方向,同时也发生在水平方向。由于足端轨迹的规划过程是按照足端轨迹理想规划点规划的,所以这些误差最终会导致实际轨迹偏离理想足端轨迹,造成机动平台抬腿或着地瞬间与地面之间存在较大冲击。因此,对OPP与APP之间的相互位置关系所导致的足端轨迹偏差情况进行分析极为重要。
为研究方便,将四足步行机动平台单腿相对于机体的运动等效到足端,即机体固定,足端相对机体运动。则上述机体实际轨迹与理想轨迹对比的3种情况变换为如图5所示的3种足端的运动。支撑相初始时刻腿的位置以细虚线表示,足端刚好接触地面时腿的位置以粗虚线表示,支撑相结束时刻腿的位置以粗实线表示。
由图5可知:将机体的运动转移到足端后,当机体APP与OPP重合时,足端恰好接触地面,此时足端无论在触地瞬时还是在离地瞬时,都与地面之间无缝隙、无冲击;当机体APP向上倾斜时,足端在其摆动轨迹的最前端陷入地面,而在其摆动轨迹的最后端则与地面之间出现缝隙;当机体APP向下倾斜时,足端在其摆动轨迹的最前端与地面之间出现缝隙,而在其轨迹的最后端足端陷入到地面中。
当足端与地面之间出现缝隙时,机动平台实际行进过程中会出现机体下沉、足端冲击地面等现象;当足端陷入地面时会导致足端触地时与地面之间产生较大的冲击力。因此,无论足端与地面之间出现缝隙还是陷入地面均会对机动平台机体的稳定性造成影响。针对足端轨迹APP与OPP之间的偏离关系,分别对4种情形(如图6所示)下的实际足端轨迹与理想足端轨迹之间的偏差进行分析。
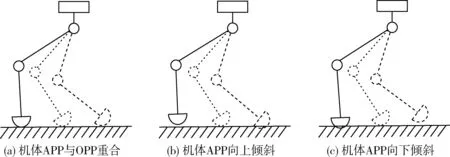
图5 机体APP与OPP对比情况
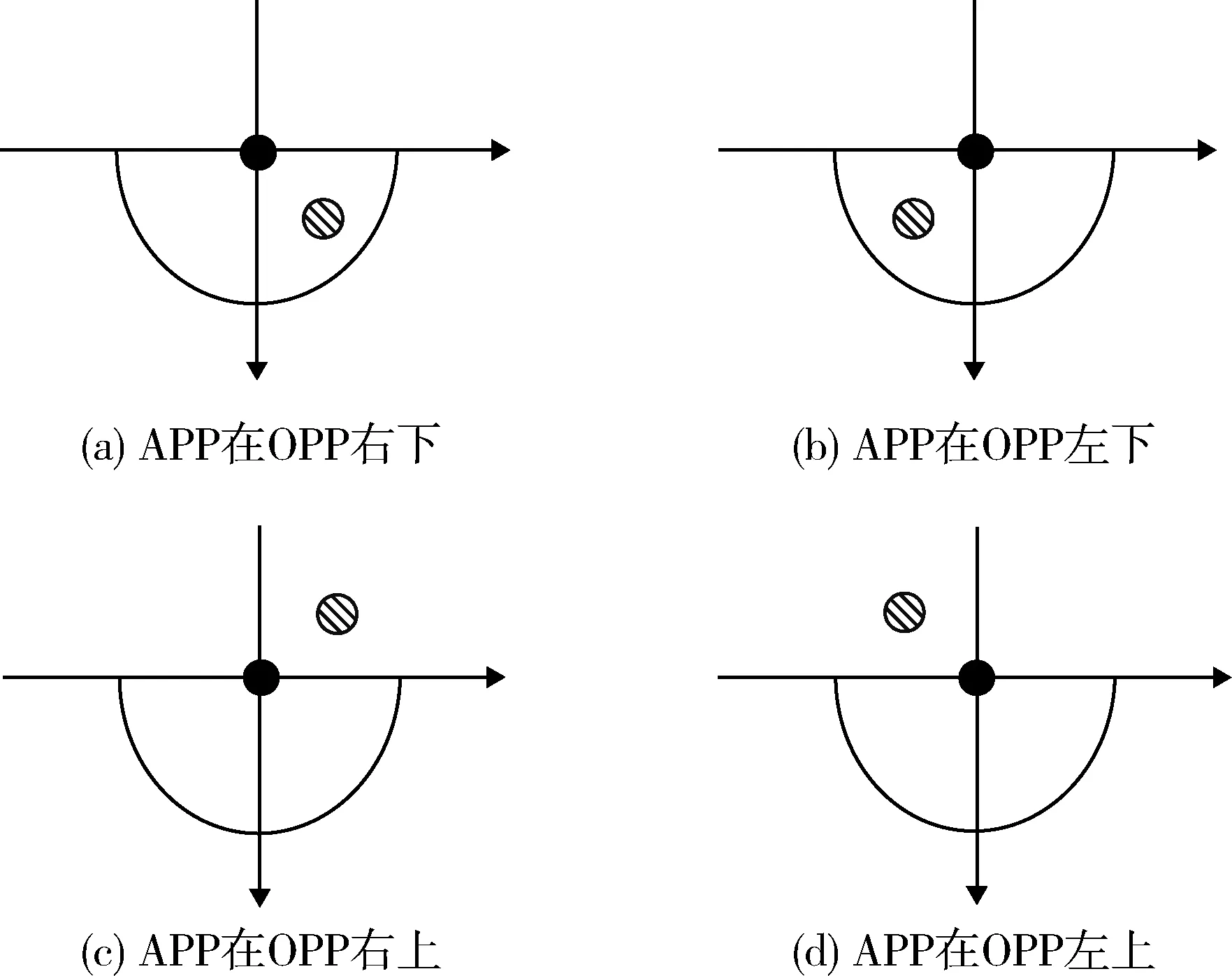
图6 机体APP与OPP之间偏离关系

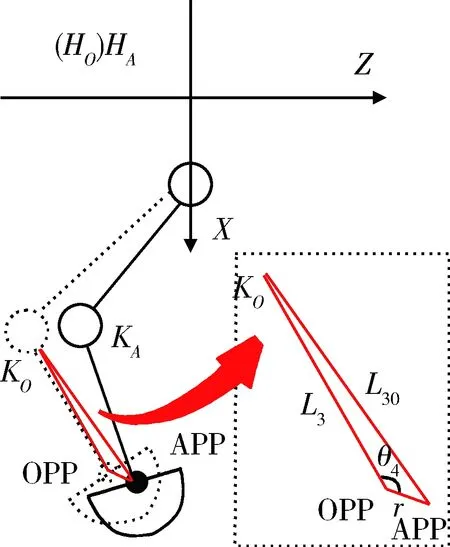
图7 APP足端轨迹位置关系

(8)
(9)
(10)
利用规划好的足端轨迹及杆件的几何参数,由逆运动学分析可得足端轨迹理论规划点沿摆线轨迹运动时各关节的转角,代入式(8)-(10),即可得到L30,然后利用正运动学分析即可得到APP的轨迹。本文取Δx=Δy=0.02 m,可得到4种情况下足端轨迹规划点的轨迹,如图8所示。
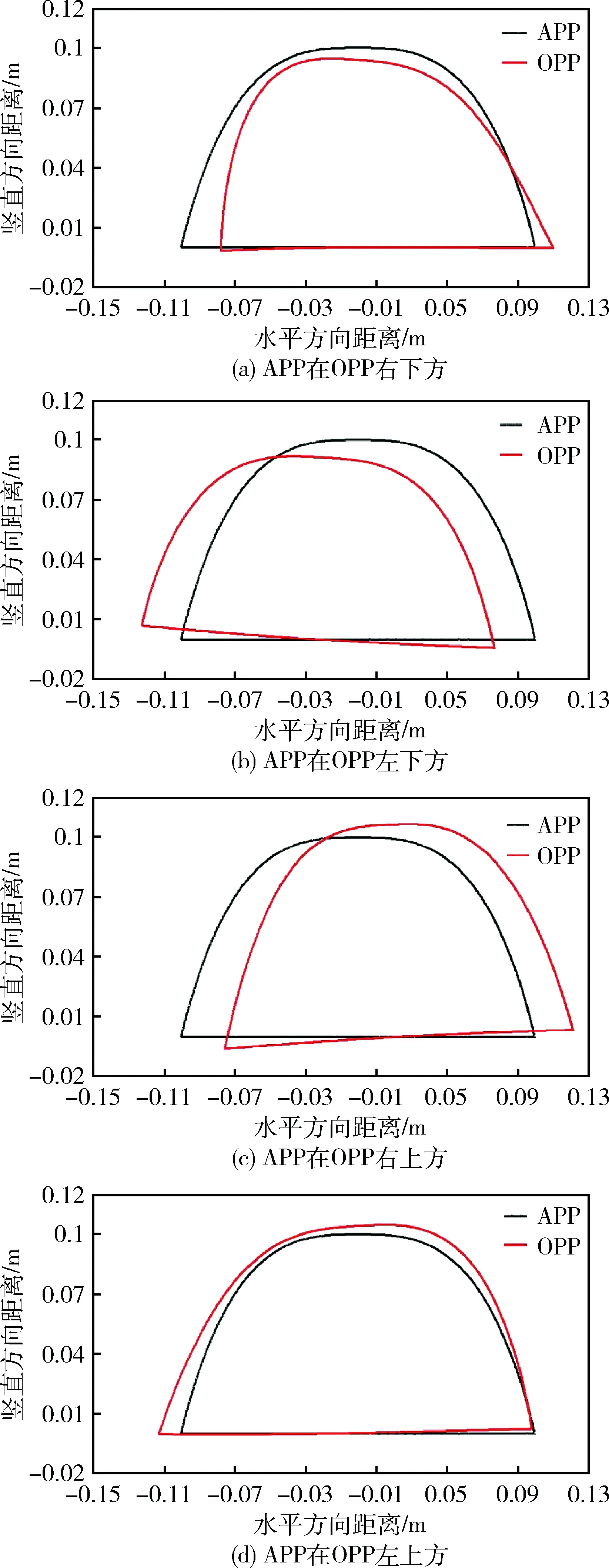
图8 足端轨迹规划点的轨迹
当APP在OPP右下方时,实际足端轨迹发生变形。在摆动相时,抬腿阶段轨迹曲线倾角变大,落腿阶段轨迹曲线斜率变小,足端轨迹最高点降低,且起脚位置与落脚位置偏前,可能导致机动平台无法越过障碍物;在支撑相时,轨迹不再是直线,而是一条两端低、中间高的曲线,前段轨迹略微陷入地面,造成前腿着地时与地面间的冲击,后端轨迹陷入地面较深,导致后腿迈腿着地时与地面之间存在明显冲击,从而使机体稳定性大打折扣。
当APP在OPP左下方时,足端轨迹顺时针倾斜一定角度。在迈腿相时,起步点位置与落步点位置偏后,且足端轨迹最高点的高度降低;在支撑相时,足端轨迹也变形为一曲线,且最前端陷入地面,最后端与地面之间产生间隙,导致机动平台前腿迈腿时与地面之间产生较大冲击,后腿迈腿时机动平台足端达到轨迹最前端时不着地,导致机体下沉。
当APP在OPP右上方时,足端轨迹发生逆时针倾斜。在摆动相时,足端起步点与落步点均超前,且足端轨迹的最高点变高;在支撑相时,实际轨迹的最前端脱离地面,而其最后端陷入地面,导致前腿迈腿着地时机体下沉,后腿迈腿时与地面之间产生冲击。
当APP在OPP左上方时,足端轨迹发生变形。在摆动相时,起步阶段足端轨迹变缓,落步阶段足端轨迹变陡,且足端轨迹最高点变低;在支撑相时,足端轨迹最前端与最后端均落后于理想足端轨迹,且最前端与地面之间出现间隙,最后端陷入地面,导致机体振动,稳定性出现问题。
步行机动平台足端轨迹的规划原则[12]为:步行机动平台抬腿瞬间及落腿瞬间足端速度及加速度均为0。但是APP的轨迹出现任何一种偏差,都会导致前腿或后腿迈步着地时足端与地面之间的明显冲击或机体的下沉,此时,步行机动平台足端轨迹的规划原则就失去了意义。除此之外,足端轨迹的变形导致步行机动平台越障能力出现问题,同时过大的地面冲击力,导致机动平台稳定性变差,地面驱动力无法充分利用,进而对其驱动系统的功率需求变大,机动平台效率变低。因此,对足端轨迹误差进行补偿至关重要。
4 结论
笔者以步行机动平台右前腿为研究对象,在对其进行运动学分析及轨迹规划的基础上,提出了运用足端轨迹OPP与APP的相对位置关系进行误差分析的方法,并对足端APP和OPP在4种相对位置下的偏差问题进行了仿真分析。结果表明:1)利用足端轨迹OPP与APP的相对位置关系可以有效测量足端位置偏差;2)位置控制下足端轨迹产生的4种典型足端轨迹误差都会导致足端与地面的冲击,进而影响步行机动平台行走稳定性。
