基于运动平台的多普勒频移无源定位算法
2023-04-25赵颖楠彭占立
赵颖楠,张 阳,彭占立
(南京科瑞达电子装备有限责任公司,江苏 南京 211100)
0 引 言
快速精确的无源定位能力是现代电磁频谱战的重要致胜因素。实战中,目标或己方平台的运动往往会带来测量误差,导致定位难、定不准等问题。多普勒频移是由平台间的相对运动产生的,依据多普勒效应,深入解析,能够解决相对运动的2个平台间的定位问题,实现对目标快速、精确的无源定位。
1 多普勒频移定位算法
1.1 多普勒效应
多普勒效应是指当雷达和目标之间存在相对运动时,雷达辐射源信号波形会被压缩或展宽,产生频率偏移,偏移值跟散射体与雷达的相对径向速度成正比。雷达应用中,多普勒频移满足以下公式[1]:
(1)
式中:fd为多普勒频移;vr为相对运动径向速度;λ为辐射源信号波长。
1.2 多普勒频移无源定位算原理
多普勒效应通常被应用于雷达对动目标的检测。无源定位中,也可以利用多普勒频移规律,对与侦察设备存在相对运动的目标进行定位[2]。运动平台无源定位示意图如图1所示。
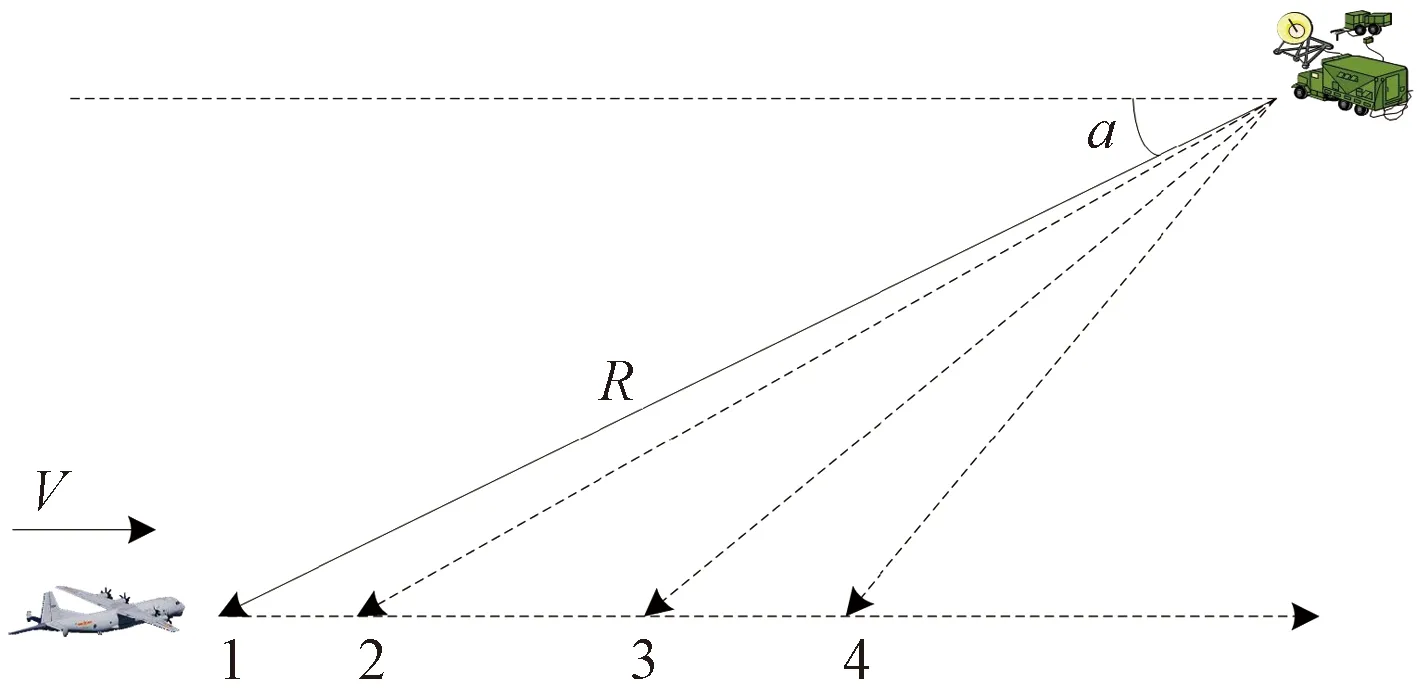
图1 运动平台无源定位示意图
如图1所示,机载平台安装侦察设备,以速度V沿水平方向飞行,雷达距离为R,信号辐射源入射角为α。根据雷达扫描周期及照射时间确定测量点,即为1、2、3、4位置,计算多普勒频移及相位差变化率,根据公式(1)计算得出雷达距离:
(2)

(3)
式中:f为雷达辐射源信号频率;c为光速;Δt为雷达照射时间。
1.3 算法优化
实际应用中,由于机载平台速度快,信号入射角变化快[3],同时雷达照射时间短,有效数据少,使得多普勒频移测量误差较大,从而导致无源定位效果较差[4-5]。本文提出了多普勒频移定位优化算法,根据机载平台速度、目标大概距离等信息确定滑动窗口,并列出查找表,得出每次滑动值。此种方法在已有雷达照射时间短、平台运动速度快、数据量少的情况下,能够极大提升数据利用率,降低测量误差,提高定位精度。
本方法主要受时效性需求及数据处理能力的限制,算法优化时,首先根据目标大概位置确定窗口个数。在仿真验证中,由于不受限于数据处理能力,设计的窗口个数为1 336;然后确定每个窗口数据个数,此数据可由平台速度与目标大概相对位置仿真遍历实现,得出查找表。本文在具体数据仿真验证时,采用的滑动窗口数据个数为4。
2 仿真验证
仿真设计:机载平台与目标雷达相对运动,目标距离100 km,平台运动速度300 m/s,信号频率8.5 GHz,相位测量误差2°,方位测量误差0.5°,雷达扫描周期1 s,侦察设备接收到的照射时间0.01 s时,进行仿真验证。
采用优化算法前后,多普勒频移变化曲线分别如图2、图3所示。

图2 未采用优化算法时的多普勒频移变化曲线
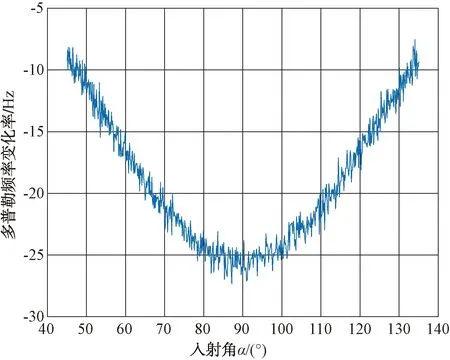
图3 采用优化算法后多普勒频移变化曲线
由仿真可见,未采用优化算法时,多普勒频移规律未能清晰展示,存在跳变与飞跃点现象,数据较混乱;采用优化算法后,多普勒频移规律较清晰,与物理规律吻合,且数据清晰平滑,不存在飞点现象,能够用于后续数据处理。
采用优化算法前后,多普勒频移定位误差分别如图4、图5所示。

图4 未采用优化算法时多普勒定位误差
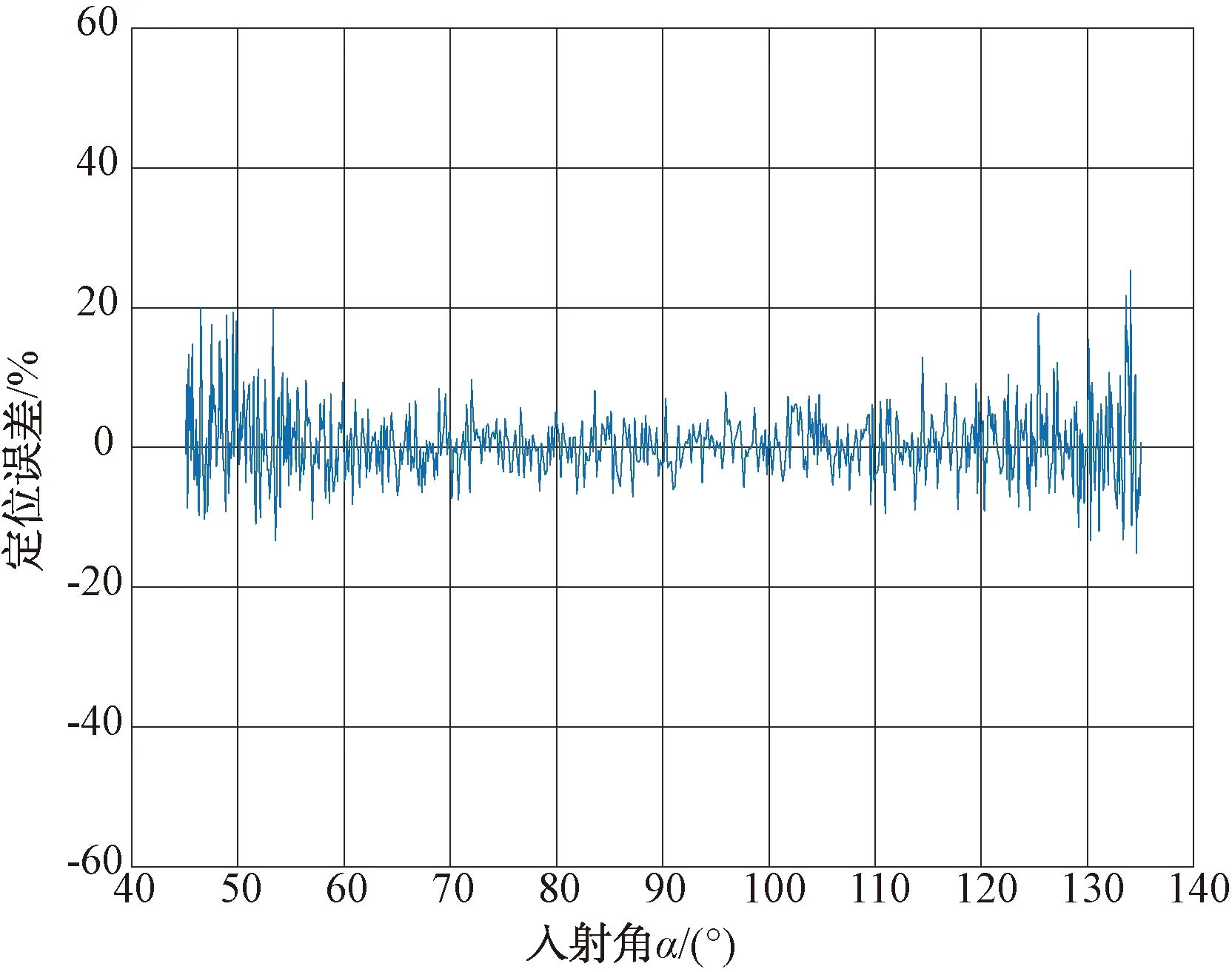
图5 采用优化算法后多普勒频移定位误差
由仿真可见,未采用优化算法时,多普勒频移定位误差非常大,合理区域平均定位误差达到40%,基本不能实现有效定位;采用多普勒频移优化算法后,合理区域定位误差均值为7%,具备良好的定位性能。
3 结束语
随着现代电磁频谱战的发展,对雷达侦察设备的要求越来越高,无源定位能够充分发挥侦察设备的优势,在敌方雷达无知无觉中获取目标信息。本文提出的多普勒频移优化算法不需要额外的测量体系,直接应用现有数据进行优化滤波,减少了多普勒信息飞点,提高了数据利用率,有效提升了无源定位精度,为侦察设备的定位提供了一种新的方法。在可预见的未来,机载平台仍是取得制空权、制信息权的重要手段,随着侦察打一体无人机的迅速发展成熟,机载平台快速、精确的定位能力将是信息情报搜集、作战资源分配以及效能评估的重要保障,具有重要的战略意义。