基于基坑工程的变形监测点位测量精度研究*
2023-04-14刘鹏鹏
刘鹏鹏
(杨凌职业技术学院,陕西 咸阳 712100)
随着中国城市化进程的加快,为提高城市空间利用率,城市建筑逐渐呈现“上天入地”的特点[1]。然而目前建筑基坑工程设计计算理论还不够成熟,为确保周围建筑物及人身安全,对基坑及其周围建筑物进行变形监测显得极其重要。在基坑监测时变形点的相对变形量超过一定的值,建筑物及构筑物等外观上将可能出现倾斜、裂缝甚至坍塌[2]。因此在基坑工程建设时,进行必要的工程变形监测成为一项必不可少的环节[3]。为保证测量精度,一般垂直位移观测利用二等水准的测量方法,对视线长度、前后视距差、任一测站前后视距累积差、视线高度、同一标尺2 次读数差以及2次读数高差之差进行控制,水平位移观测则一般利用对距离和角度的观测,通过测站中误差、最弱点中误差进行精度控制。
1 基坑工程监测的特点
1.1 影响监测精度因素众多
在基坑建设初期,对基坑的围护、挖掘及环境等各种因素对基坑产生侧向压力,使基坑产生流沙、管涌甚至倾覆等问题;由于基坑开挖一般会对其周边的房屋设施、各类管道管线、道路干道等产生不同程度的影响,由于这些因素的存在使得基坑监测的任务更加繁重,难度也大大增加[4];进行基坑监测时周围环境条件与监测精度更是密不可分,如周围产生的振动、温度、湿度、风、雾、大气遮光等。
1.2 基坑工程对变形监测要求严格
与普通建(构)筑物的变形监测相比基坑工程的变形监测在精度上更高,而且基坑的监测工作从桩基施工开始到基坑回填完成结束,涉及整个过程且精度期望达到精密水准测量精度以上等级[5-6]。为保证所有监测点的精度,整个基坑监测过程需按照等精度观测的方法进行。
2 影响基坑工程监测精度的因素
影响基坑工程变形监测精度的误差来源主要分为观测误差、仪器误差和外界条件3 个方面,本文为探索更加合理的变形监测方法,提高监测精度,结合变形观测方法(水准测量)的特点进行研究,期望达到某些便于遵循的结论。
2.1 观测者的影响
在水准测量的过程中,若采用光学水准仪,每次读数的误差来源主要包括以下3 个方面。
照准水准尺产生的误差m照。由于人眼的分辨力最大不超过60″,因此,当观测者在观察水准上的尺读数时产生的误差可以记为:
式(1)中:v为望远镜放大倍数;ρ″为一弧度所对应的秒值,一般取206 265;d为水准仪的最大视距,m。
符合水准器气泡居中的误差m中。其公式为:
读数误差m读。在进行水准尺尺面读数时,不同型号的仪器读数精度不同,目前市面上最常见的几种仪器的读数误差分别为:①用数字水准仪(DS05 和DS1)搭配因瓦尺时,m读=±0.01 mm;②用DS1 光学水准仪配套黑红双面尺时,m读=±0.03 mm;③用DS3 微倾式水准仪及其配套的黑红双面尺时,m读=±0.5 mm。综上所 述 , 每 测 站 高 差 的 观 测 误 差 为
在不同精度等级下,利用MATLAB 编程进行数据统计分析,得到测站高差观测误差特级为0.047 mm、一级为0.153 mm、二级为0.301 mm、三级为0.925 mm,具体如图1 所示。
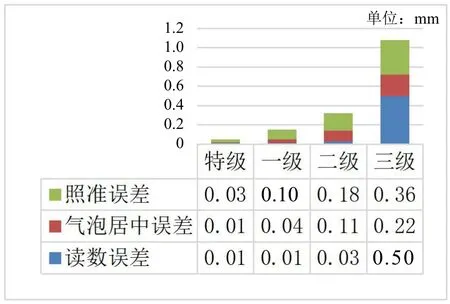
图1 不同监测精度等级下的测站高差观测误差分布图
2.2 仪器误差
在进行测量时,由于仪器所产生的系统误差大致分为以下4 种:①设备调焦不准确导致的误差m焦;②水准尺本身存在的分划不准的误差m尺;③仪器使用过程中,由于尺底磨损产生的误差m底;④由于仪器视准轴和水准管轴不平行所造成的误差m i,
由于在求取每测站的高差时,调焦误差和i角误差的影响只有一次,而水准尺分划误差和尺底不平的误差影响为2 次,故每测站的高差中,仪器误差为
在不同精度等级下,利用MATLAB 编程进行数据统计分析,得到测站仪器误差特级为0.022 mm、一级为0.054 mm、二级为0.156 mm、三级为0.576 mm,具体如图2 所示。

图2 不同监测精度等级下的测站仪器误差分布图
2.3 外部环境引起的误差
一般情况下,环境对测量精度的影响主要体现在2方面,即尺子竖立不直所导致的误差和其他外界环境,即
由于外界环境因素非常多,很难准确计算,因此根据经验及日常测量情况大致估算出各等级水准的误差为:特级m外=±0.01 mm,一级m外=±0.01 mm,二级m外=±0.02 mm,三级m外=±0.04 mm。
3 基坑工程监测精度评价指标研究
一般条件下,通过测站高差中误差、观测点高程中误差、水准环线最弱点高程中误差、观测点沉降量中误差以及观测点最弱点沉降量中误差来评定变形监测精度[7]。
对观测误差、仪器误差及外界环境影响3 方面进行综合分析,可以得到沉降观测水准测量每测站的高差中误差
一般取2 倍测站高差的中误差为每测站的高差允许值 Δh=2m站。
水准测量路线示意图如图3 所示。假设在计算过程中A点位已知,则H i1、H i2 的中误差分别为,其权为;,其权为
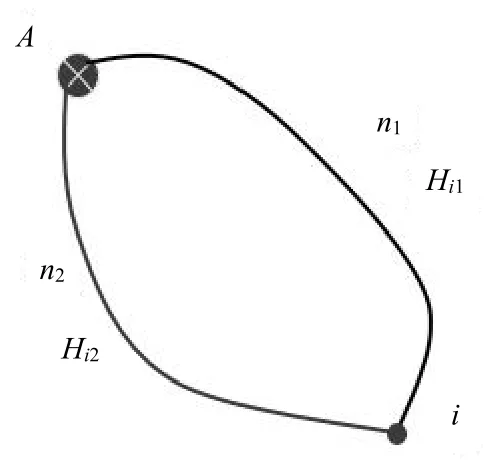
图3 水准测量路线示意图
i点的高程Hi是H i1 和H i2 的加权平均值,即
i点的高程Hi的中误差按加权平均值中误差计算,即
根据误差理论,整个闭合水准路线上精度最弱的点就是水准路线的中点,由此得环线最弱点的高程中误差为,即当n1=n2时,mHmax=
4 实验
以陕西省咸阳市某住宅小区的沉降监测项目为基础,对以上几种精度评价指标进行研究分析,共尝试了闭合水准、附和水准和水准网3 种监测路线,共采集数据6 期,监测使用仪器设备、天气条件及人员一致。利用MATLAB 软件对这3 条路线的监测数据分别进行分析和误差统计,得到的结果如表1 和图4所示。

表1 3 条监测路线的精度分析表
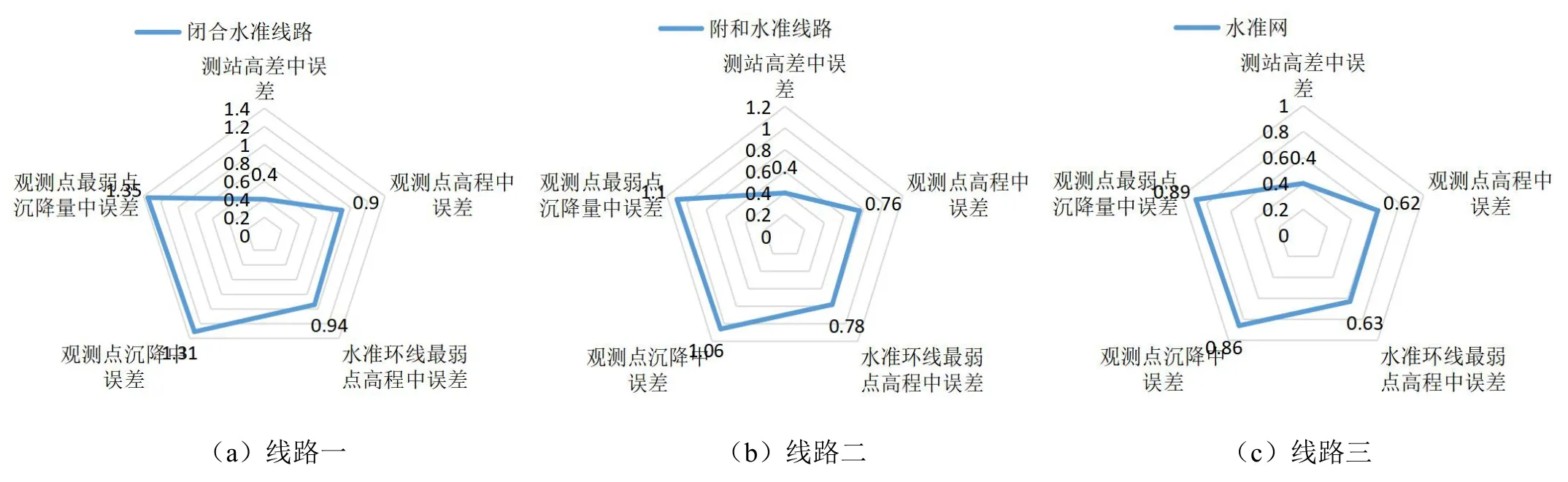
图4 3 条监测路线的误差统计分析图(单位:mm)
研究表明,在初始条件相同的情况下,不同的观测路线在不同的误差评定中表现出差异性,因此在进行基坑监测时需要合理选择观测路线,在一定程度上可以提高观测精度。对于工程条件比较复杂的地区,建议在测区内对高程控制网进行加密测量,且水准网形式的测量路线精度较好。
5 结束语
基坑工程的变形监测工作直接关系着基坑的施工质量及安全,因此,对基坑工程进行变形监测时,要严格按照规范要求,不能仅采取一个精度指标进行安全监测,除按照允许变形量确定基坑工程监测的基本观测精度外,在监测过程中还必须对测站高差、观测点高程、水准环线最弱点高程、观测点沉降量及观测点最弱点沉降量进行精度评定。此外,需要结合工程实际情况,加强对重点部位的监测,选用合理有效的基坑变形监测方法,确保基坑工程安全。
