同时对向间接高差精密测量技术应用研究
2018-10-22叶志龙刘成龙
叶志龙 刘成龙 王 永
(1.中交公路规划设计院有限公司,北京 100088;2.西南交通大学地球科学与环境工程学院,四川成都 611756;3.广东省长大公路工程有限公司,广东广州 511431)
特大型桥梁跨越江河湖海的宽度一般在1 000 m以上,建立这种规模的桥梁平面控制网目前几乎全部采用GNSS静态相对定位技术,而建立这种规模的桥梁高程控制网,必须进行长距离跨河高差测量。传统的跨河高差测量技术主要有:(1)高精度全站仪三角高程往返测测量技术[1-4];(2)精密水准仪+精密水准尺+特制标牌跨河高差测量技术[5-6];(3)GNSS跨河高差测量技术[7-8]。第一种方法存在仪器和棱镜高无法精确量取和大气垂直折光无法完全消除的问题,第二种方法测量效率极低而且需要制作特别标牌,采用第三种方法时,当两岸的高差大于50 m,会由于两岸的高程异常变化率差异大而导致无法达到一、二等高差测量的精度。因此,跨河长度大于1 000 m的特大型桥梁高程控制网测量一直是工程测量的难题之一。
近年来,测量技术的重要创新之一就是高精度智能型全站仪的出现和应用。这种类型的全站仪除了测距和测角精度高之外,还具有电子驱动和目标自动识别的功能,能够在其平台上进行二次开发,实现自编软件驱动,进行各种各样的自动测量(包括自动记录和存储测量数据、自动判断测量数据是否合格等),这样的全站仪又称之为测量机器人[9-12]。基于两台智能型全站仪,提出一种同时对向间接高差[13-14]测量技术,用于取代水准仪陆地一、二等高差测量。该技术还特别适合于丘陵和高差大的山区,以及江河湖海区域的一、二等跨越高差测量,从而大幅度地提高一、二等高差测量的效率。
1 同时对向间接高差测量技术原理
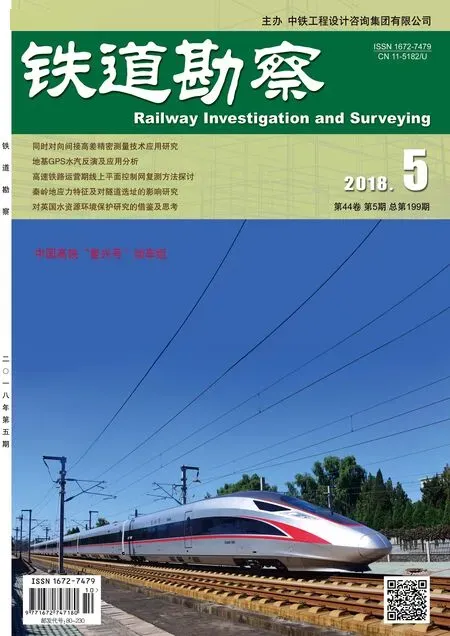
如图1所示,A、B为待测测段的起终点,现需要精确测量(一、二等高差测量的精度)A、B点间的高差。传统的三角高程直接高差测量技术,是在A点架设一台全站仪,在B点架设棱镜,然后根据三角高程测量原理往返测取均值,直接得到A、B点间的高差[15]。该方法存在需要精确(要求误差小于0.5 mm)量测仪器高i和棱镜高v以及往返测难以消除大气垂直折光影响等问题。
1.1 从根本上解决仪器高的量测问题
如图2所示,采用两台全站仪,分别用脚架架设在Z1、Z2的位置,根据全站仪与两个棱镜的通视情况,将测站架设在距棱镜10~20 m且靠近AB连线处(又称自由测站),以达到两台全站仪可同时对A、B两点上的棱镜进行观测的条件。A、B点上棱镜的高度分别为vA和vB。
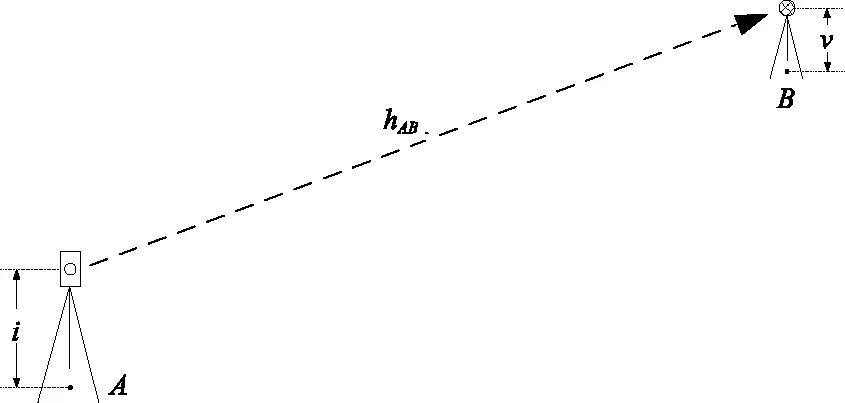
图1 直接高差三角高程测量原理示意
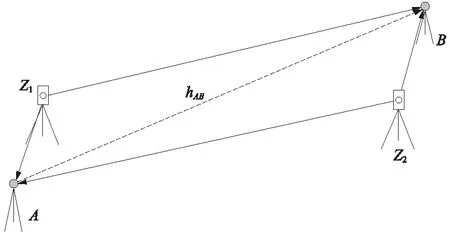
图2 同时对向间接高差三角高程测量原理示意
该方法的测量原理是:一台全站仪在Z1处分别对目标A和B进行斜距和垂直角观测,假若仪器高为iZ1,依据单向三角高程直接高差测量原理,则可以计算得出Z1测站点分别至A点和B点的直接高差hZ1A和hZ1B
(1)

(2)
式(1)中,SZ1A、αZ1A分别为Z1处仪器观测A点的斜距和垂直角;DZ1A为Z1和A点之间的平距;KZ1A为Z1至A点观测时该方向的大气垂直折光系数;R为地球平均曲率半径。式(2)中,各符号的含义与式(1)中同理。
式(1)减去式(2),则可以计算得到A至B点之间的高差(间接高差)hAB为

(3)
通过观察式(1)~式(3)可知,式(1)和式(2)还需要量测仪器高,但式(3)就不需要量测仪器高。因此,同时对向间接高差测量技术从根本上解决了三角高程测量仪器高难以高精度量测的技术难题。
1.2 从根本上解决大气垂直折光的影响问题
在第一台全站仪进行观测的同时,另一台全站仪在Z2处也分别对A和B棱镜进行斜距和垂直角观测,与式(1)~式(3)同理,B至A点之间的高差(间接高差)hBA为

(4)

SZ2AsinαZ2A)+C]+(vA-vB)
(5)
式中:
在选择两台全站仪自由测站位置时,尽量使DZ1A≈DZ2B,DZ1B≈DZ2A;又因为两台全站仪同时在较小的范围内(10~20 m)同时对A、B点上的棱镜进行观测,可以认为KZ1A≈KZ1B≈KZ2A≈KZ2B,式(5)中的C可认为近似等于零,故式(5)可进一步化简为
SZ2AsinαZ2A)+(vA-vB)
(6)
由式(6)可知,由于是同时对向间接高差测量,所以两台全站仪分别测量的间接高差取均值后,很大程度上抵消了地球曲率和大气垂直折光的影响,只剩下棱镜高的精确量测问题。
1.3 解决高精度量测棱镜高的问题
A、B两点棱镜高vA和vB的精确量测,可采用定长棱镜装置(专利号ZL 2011 1 0110857.5)和全站仪。定长棱镜装置样式如图3所示。
图3 定长棱镜装置样式示意
定长棱镜装置的特点主要有:(1)棱镜杆的底部为平面,可直接安置在水准点上(水准点标志的顶部一般是球形);(2)棱镜杆底部到棱镜中心的距离是定长,其精度由数控机床的加工精度决定,一般误差小于0.1 mm;(3)其基座顶部安置了一个圆水准器,使用时通过旋转两根长螺旋杆使气泡居中,使得棱镜能够精确置平。
采用定长棱镜装置和全站仪高精度量测棱镜高的原理如图4所示。
如图4所示,高棱镜的棱镜高为V1+V2,而V2为定长,只需要采用全站仪近距离测量高低棱镜间的高差V1。测量V1时,全站仪自由架设在距离A点10~20 m远的地方,分别对高低棱镜进行多测回的斜距和竖直角测量,分别计算全站仪到高、低棱镜的直接高差,再把两直接高差相减就可得到高精度的V1。在该方法中,由于V1是高低两棱镜中心间的距离,所以V1中本身没有棱镜高的量测问题,因此也不存在仪器高的量测问题。可以采用两次独立测量的方法量测棱镜高,也就是在采用上述方法量测一次棱镜高后,全站仪在离原地1~2 m远的地方重新架设并测量一次,得到该棱镜的第二次棱镜高。一般情况下,两次量测的棱镜高之差小于0.3 mm。
综上所述,同时对向间接高差测量技术解决了传统全站仪三角高程测量中存在的一些关键问题,可实现全站仪陆地一、二等高差测量。如果两水准点A、B相距在1 500 m以内,则可以直接高精度测量A、B点间的高差;如果两水准点A、B相距在1 500 m以上,则可以像连续水准测量一样在两水准点之间设置转点,最后汇总得到A、B点间的总高差。
2 同时对向间接高差测量技术用于跨河高差测量
2.1 场地布设与测量
在应用同时对向间接高差测量技术进行高精度跨河高差测量时,需对陆地上的测量场地布设方案进行改进。首先,在合适的跨河处两岸边缘各选择两个临时跨河点A1、A2、B1和B2,构成大地四边形,形成四条跨河高差测线,如图5所示。同岸的两个跨河临时点间相距20~30 m,为了使后续的闭合环高差闭合差计算结果更加客观,同岸跨河点间(A1-A2、B1-B2)的高差应采用电子水准仪进行高精度测量。两岸的两台全站仪分别架设在靠近河堤内侧的Z1、Z2处,距同岸的跨河点15~20 m;最后,在四个临时跨河点上方均采用脚架和常规基座架设高棱镜,精确量取各个棱镜的棱镜高。至此,采用同时对向间接高差测量技术进行跨河高差测量的场地布设和准备工作结束。

图5 同时对向间接高差测量技术进行高精度跨河高差测量原理
在跨河高差测量时,两台全站仪均对四个跨河点上的棱镜同时进行多测回的竖直角和斜距观测,外业观测的时段数、测回数、垂直角、斜距的技术要求应满足相关规范。正式测量时,两台全站仪先按照规定时段数的一半进行跨河高差测量。之后两台全站仪调岸,再进行剩下时段数的跨河高差测量,全站仪调岸测量的目的是为了消除两台全站仪之间竖直角测量系统误差差异的影响。全站仪调岸期间,四个临时跨河点上方的棱镜可以不动。
2.2 高差较差校核与闭合环闭合差计算
每个时段的外业观测数据按照式(1)~式(6)进行数据处理,即可计算得到每个时段四个跨河测段A1B1、A1B2、A2B1、A2B2的间接高差。之后,进行同一个测段各个时段间高差较差的检核和各个闭合环高差闭合差的检核。
同一测段不同时段间的间接高差较差,应满足式(7)的要求
(7)
式(7)中,MΔ为每千米高差测量的偶然中误差限差,一、二等分别为0.5 mm/km和1 mm/km;N为观测时段数;S为跨河视线长度,以km为单位。需要注意的是,在用式(7)进行同一测段不同时段间的间接高差较差合格性检核的时候,应该是全站仪调岸前和调岸后各个时段的高差分别进行检核,而不是所有时段的间接高差放在一起进行高差较差检核。
在全站仪调岸前和调岸后的间接高差均满足(7)式要求后,同一测段的间接高差取该测段所有时段高差的均值,这样就能够消除两台全站仪之间的竖直角测量系统误差差异对最终结果的影响。
最后,采用各个测段的最终间接高差,按照图5中的闭合环,计算所有闭合环的高差闭合差。此时,岸上测段的高差采用水准仪所测高差。按照上述方法计算的闭合环高差闭合差,计算结果更加客观和独立。
3 应用情况
3.1 在陆地上的应用情况
陆地上的实验选择在某山区特长引水隧道洞外高程控制网中两个相距约5 km,高差143 m左右的两个支洞口高程控制点BM1、BM2。这两个水准点间的高差经过多次二等水准测量,水准测量的精确高差为142.655 5 m,水准测量的单程测站数达到178站。
为了验证同时对向间接高差测量技术在山区能否达到二等高程测量的精度,实验分两步进行:第一步,把BM1、BM2间的水准路线人为地按照地形起伏情况设置4个转点,分别为SY03、SY04、SY05、SY06,将该条线路分为了5个测段,如图6所示。在每个测段中进行往返测,然后比较所测的往返测高差较差能否满足二等水准的限差要求,比较结果如表1所示;第二步,把BM1、BM2间往、返高差与水准已知高差进行比较,验证结果如表2所示。第一步实验可以验证该方法的内符合精度,第二步实验可以验证该方法的外符合精度。

图6 陆地实验测量路线及点号示意
从表1可见,5个测段的往返测高差较差均小于二等水准的相应限差要求,说明按该方法进行三角高差测量,其内符合精度已达到二等水准的要求。
从表2可见,三角高程高差与水准高差的较差均小于限差要求,其精度可达到二等水准的要求。此外,从表2中还可知,三角高程方法的测站数比水准测量的测站数少得多,路线长度也比水准测量短。相较于山区二等水准测量而言,同时对向间接高差测量技术的优势较为明显。
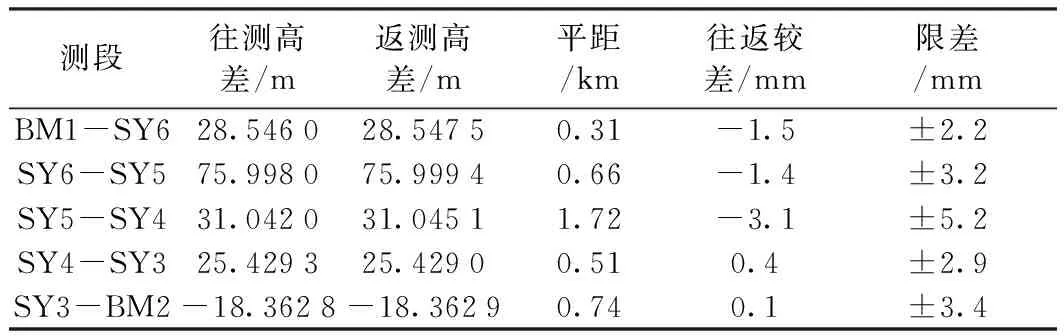
表1 各个测段往返测高差较差统计
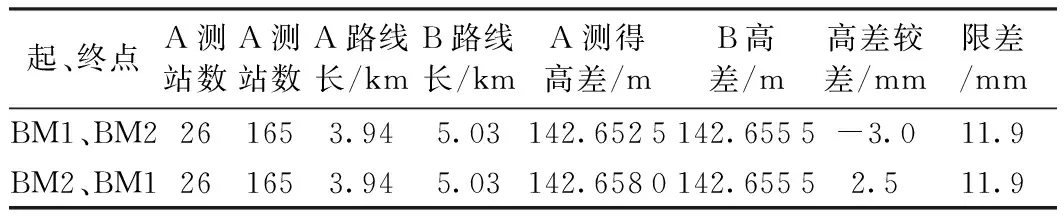
表2 往返测高差与水准高差较差比较
注:表中A代表三角高程的方法,B代表水准测量的方法。
3.2 在跨河高差测量中的应用情况
浙江某跨海特大型悬索桥已通车10年,需要对其二等高程控制网进行复测,以便依据可靠的控制网进行主缆和主梁线形的测量与评估分析。该桥高程控制网中的跨河高差测量部分采用了同时对向间接高差测量技术。该桥跨河高差测量的河面宽度为2.26 km,按照规定应该观测18个时段,实际观测了11个时段。全部11个时段的高差较差检核结果如表3所示,可见四个测段11个时段的实际高差较差均小于相应的限差要求。
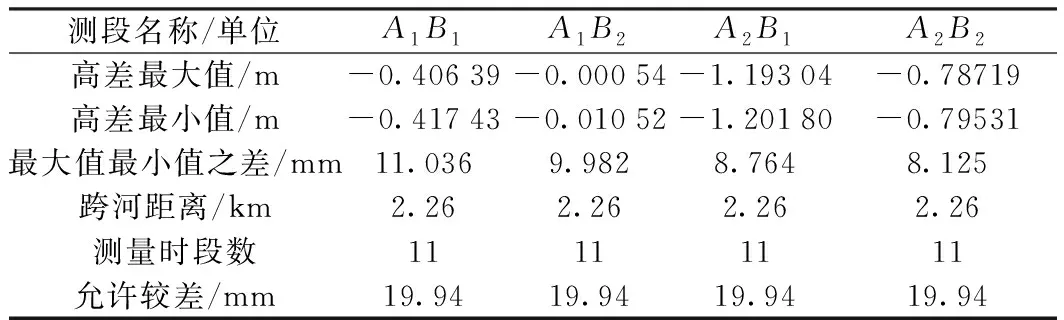
表3 跨河测段高差最大值最小值较差检核结果统计
利用表1中的四段跨河高差和两段岸上的水准高差计算的各个闭合环的高差闭合差结果如表4所示,可见五个闭合环的高差闭合差均小于相应的限差要求。

表4 跨河测段闭合环高差闭合差计算结果统计
由此可见,该桥的跨河高差测量,仅观测了11个时段,所有的精度指标就达到了二等高程控制网的精度要求。
4 结论
在充分应用现代高精度智能型全站仪自动照准和自动测量技术的基础上,采用陆地上的两台全站仪同时对向间接高差测量技术,以实现全站仪高差测量不量测仪器高并较大程度抵消大气垂直折光对高差测量的影响;提出采用定长棱镜装置和全站仪精确量测棱镜高的技术。对陆地上同时对向间接高差测量技术中的场地布置进行改进,提出了跨河同时对向间接高差测量技术,以解决特大型桥梁高程控制网难以高精度和高效率测量的技术难题。实验和应用结果表明,同时对向间接高差测量的精度能够达到二等高程控制测量的要求,效率高,简单方便,值得推广。