广域六角格兵棋地图构建方法与机动推演应用
2023-03-09周建彬黄心海梁晓宇
周建彬, 贲 进, 黄心海, 王 蕊, 梁晓宇
(信息工程大学地理空间信息学院, 河南 郑州 450001)
0 引 言
兵棋推演是评估作战方案、实施作战筹划的科学方法,也是训练作战指挥能力的有效手段[1-3]。构成兵棋的三大核心要素分别是:兵棋地图(棋盘)、棋子和规则[4]。兵棋地图是作战行动推演的场所,是依据兵棋推演需求综合处理战场环境,用以描述战场环境要素本身及其对作战行动影响规律的地图[4]。现有兵棋地图大多采用六角格制作,相较于四角格,其优势体现在[5]:格网单元一致相邻,有利于推演算法选择更多、更准确的计算方向;单元排列紧凑,空间采样效率高,有利于降低量化误差。
美军最早开展计算机兵棋系统的研发,较具代表性的联合战区级模拟(joint theater level simulation,JTLS)采用六角格兵棋地图支持海陆空天多边联合模拟作战[6]。美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)启动的“兵棋突破者”项目采用六角格兵棋地图实现了人工智能对抗推演[7]。文献[8]研制了战略战役级兵棋系统,其六角格兵棋地图的要素贴近真实作战场景。文献[9]研发的“庙算·陆地指挥官”战术兵棋平台采用六角格建立战场环境模型,被应用于智能推演研究。还有学者研究了六角格兵棋地图的设计[10]、兵力机动路径规划[11]、地形量化[12]及战场态势多尺度表达等[13]。
现代战争正趋于多元化和全球化,战场环境范围越来越广[14],兵棋推演的复杂度也越来越高。然而,现有兵棋地图大多针对特定区域建模,无论战场范围多大,各类要素一律投影到平面建模再做修正[15],极易导致战场边界处的计算无法收敛。同时,传统兵棋地图难以在推演过程中自由切换六角格分辨率以满足不同级别的部队作战推演需求,灵活程度不高。因此,不断扩大的战场空间范围和愈加复杂的战场环境,对兵棋地图提出了广域、多尺度的新要求[16]。
全球离散格网系统(discrete global grid system, DGGS)是递归剖分整个地球空间而形成的多分辨率离散地球参考模型[17-18],从结构上支持多源异构空间数据的融合处理以及地理位置相关事件的模拟推演,是研究广域及全球问题的强有力工具。李锋等[1]利用全球空间四角格网系统建立了虚拟战场环境时空表达模型。张继凯等[14]采用了四孔径全球六边形格网系统可视化战场环境数据。吴婷婷等[16]验证了将七孔径六边形DGGS开源库H3用于兵棋地图建模的可行性。
综上所述,构建广域、多尺度的兵棋地图对维护国家核心利益和扩展战略发展空间而言具有重大意义。六边形格网的几何结构与兵棋地图中的六角格完全相同,现有各类六角格作战推演算法几乎可以原封不动地移植到六边形DGGS上,为历史成果的继承创造了有利条件。本文首先引入一种四孔六边形全球剖分编码模型;然后,基于该模型提出兵棋地图地理环境栅格、矢量数据六角格建模方法;随后,面向部队机动建立环境要素与作战要素联合作用的时间效能模型,设计机动时间最短的路径规划算法;最后,融合各类数据建立兵棋地图地理环境模型,设计部队海陆两栖机动推演实验加以验证。下文遵从作战推演领域的习惯,称六边形为六角格。
1 全球六角格网建模
构建全球六角格网系统首先需要在多面体表面进行递归剖分,形成多分辨率六角格网,然后再映射至球面[19-20]。关键设计选项包括多面体的选择、多面体表面的剖分、多面体至球面的映射以及六角格编码索引,如图1所示。
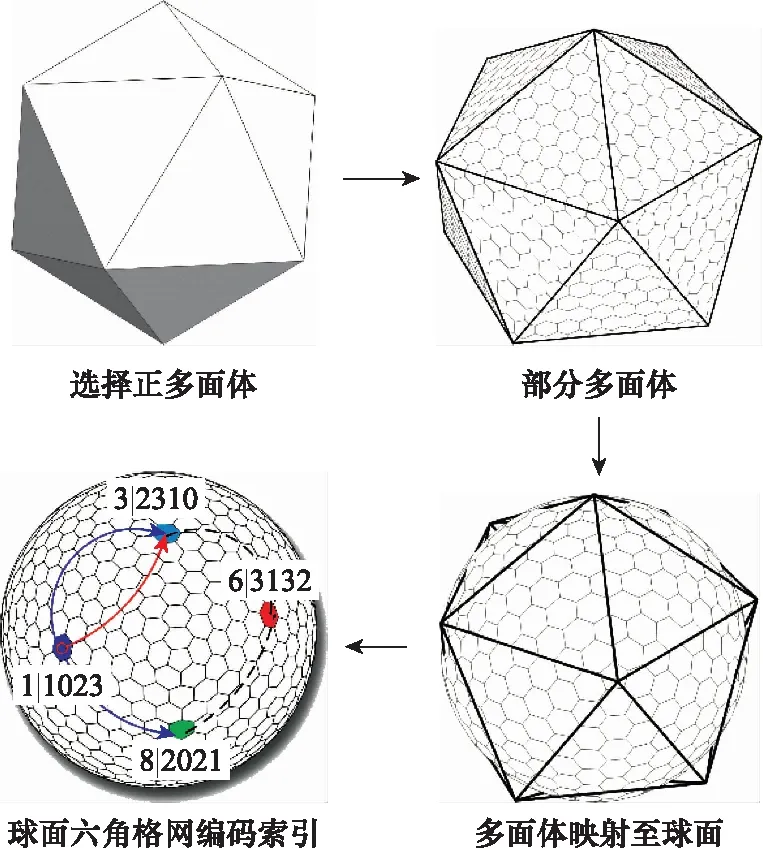
图1 全球六角格网构建过程Fig.1 Process of constructing global hexagonal grids
文献[21]提出二十面体上四孔剖分的一致瓦片六角格层次结构(hexagon hierarchy on uniform tiles, HHUT),建立全球分布均匀的六角格网系统,设计编码、运算及与地理坐标相互转换等算法。相较于现有四孔六角格网系统,HHUT具有结构更加简洁、编码运算效率更高的优势,详细算法本文不再赘述。HHUT球面第3层~第5层的多尺度表达如图2所示,其中不同颜色代表不同的“瓦片结构”;第8层~第15层的格网分辨率如表1所示。
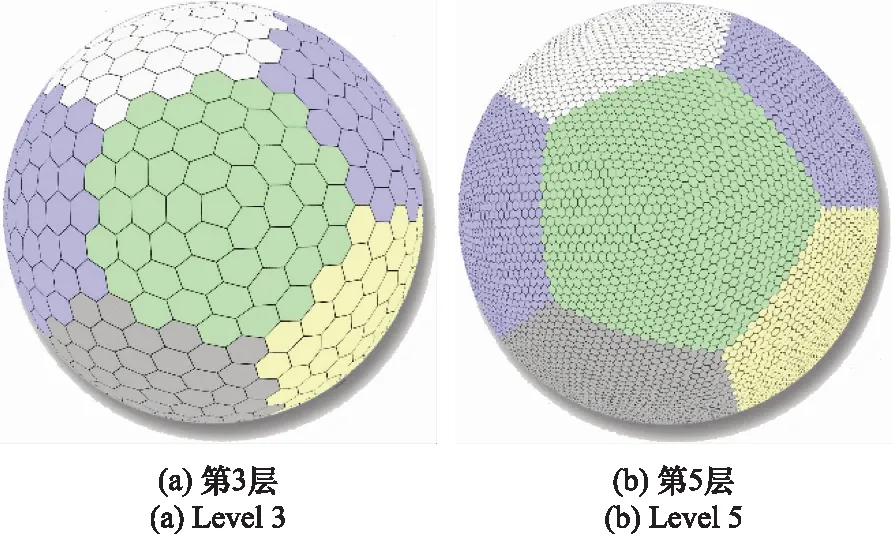
图2 HHUT球面多尺度结构Fig.2 Spherical multi-scale structure of HHUT
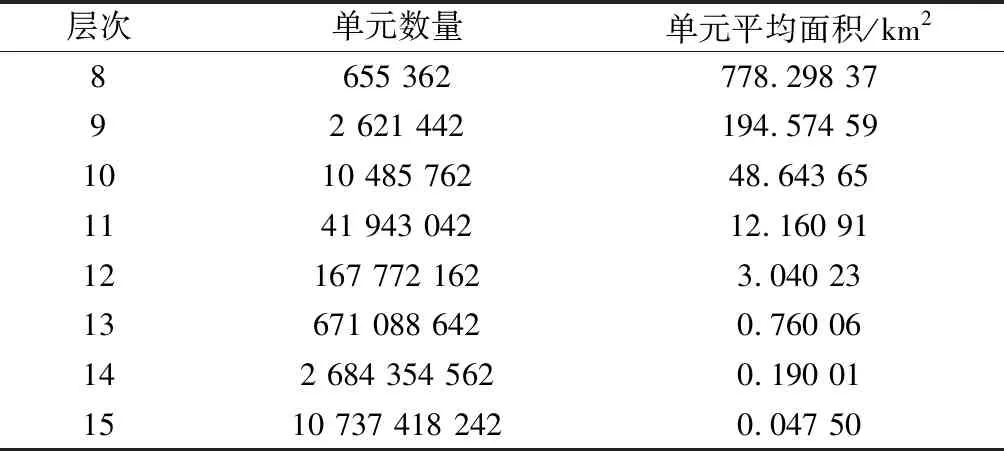
表1 HHUT单元分辨率
2 兵棋地图地理环境建模
战场地理环境数据主要可划分为栅格和矢量两大类。在测绘与地理信息领域,通常将栅格和矢量数据量化至格心,既表示属性信息,又表示精度[22-23]。对于部队机动推演,地理环境建模需要考虑当前要素对部队机动的影响,可借助格边(单元的边)和格点(单元顶点)辅助承载相应数据二次建模,如河流作为交通要素时由格心承载二次建模,作为障碍要素时又需量化至格边,以辅助承载相应数据二次建模。
2.1 栅格数据建模
受作业习惯、产品兼容等多方面因素制约,目前绝大多数栅格数据产品仍旧采用基于地图投影的传统模式生产。这些数据的空间基准与全球六角格系统存在差异,必须在统一坐标系下按照空间位置进行“对准”,并采用特定方法将数据赋值到六角格上,该过程本质上是空间数据的格网量化[24]。对于遥感影像、定量统计、专题分类、地表高程等栅格数据,设计属性值量化到格心的一般方法如下。
首先,格网层次计算。一般选择与原始数据分辨率最接近的格网层次,若原始数据像元对应的地面面积是Si,则格网的层次n应当满足Minn|Sn-Si|。用于兵棋地图构建的六角格层次只要能满足对应的推演级别即可。其次,在球面上重采样属性值,分4个步骤实施。
步骤1将指定分辨率下单元格心编码转换为球面地理坐标[21],得到球面上一块特定的六角格区域;
步骤2将原始数据转换(如逆投影)至球面,再将转换后的数据中心点与六角格心绑定;
步骤3查询邻近单元属性值,选择合适的内插方法(如最邻近法、平均值法、双线性法等)实现属性重采样;
步骤4将最终得到的属性值赋予六角格,与格心绑定。
2.2 矢量数据建模
矢量数据格网化过程也被称为矢量数据量化[24]。矢量点可直接与六角格心或格点绑定,建模相对容易。矢量面采用六角格的集合表示,已有学者[25]研究了建模方法。矢量线一般量化至格心,以彼此相邻的六角格表示。Du等[26]根据最优漫游路径理论提出了平面三角形格网离散线生成算法。借鉴该思路,本文通过HHUT编码运算实现矢量线量化至六角格心。在兵棋地图中,矢量线比较特殊,对其建模需要综合考虑作战推演的实际需求。
在作战推演模型中,当公路、铁路等交通要素用于通勤、行军或物资运输时,采用格心仅能表示要素位置,难以表示矢量线的走向,不利于作战行动中机动路线的计算。如图3(a)所示,公路线S经格心量化后可用六角格ABCDE表示,但如此建模导致B和D、A和C之间均有公路连接,而实际公路走向为A→B→C→D→E,B和D、A和C之间没有公路连接,在计算路线相关算法时容易出现与实际情况不符的问题。本文采用格边辅助建模方法解决此问题:在矢量线格心量化过程中,标记其与六角格相交的格边,确定矢量线的走向,如图3(b)所示,没有标记的格边则无公路连接,以避免计算错误。
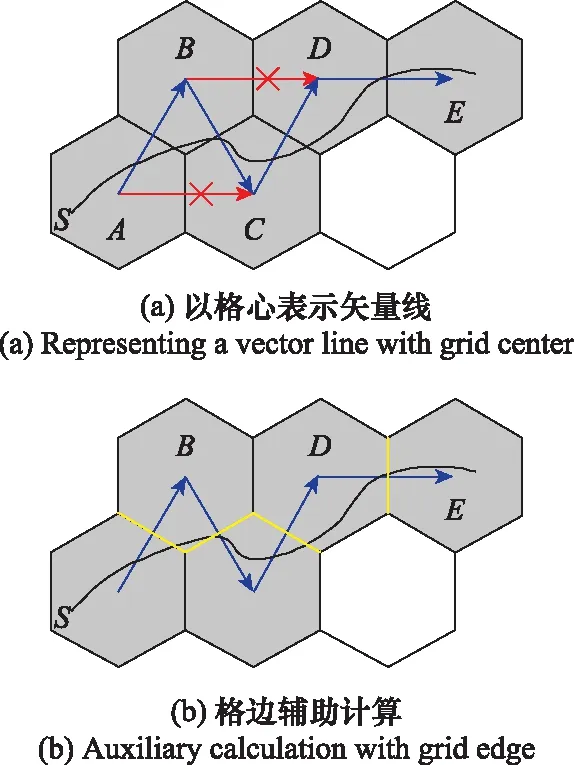
图3 交通类矢量线六角格建模Fig.3 Modeling of traffic vector line hexagonal grid
某些矢量线在作战行动中属于障碍要素,如河流对部队越野机动会产生阻碍,影响机动时间。在作战模型中,障碍要素一般计算至六角格边,表示经过相邻六角格需要跨越的障碍。矢量线与格边的位置关系大致可分为4种,即通过同一格边进出、通过相邻格边进出、通过间隔格边进出和通过相对格边进出,其障碍效果如图4(a)所示。本文提出最邻近法量化障碍类矢量线要素:计算矢量线上节点与六角格各边的距离,将距离最小者作为该节点的最终量化格边。若图3中矢量线为障碍类型的河流,则其格边建模结果如图4(b)所示。
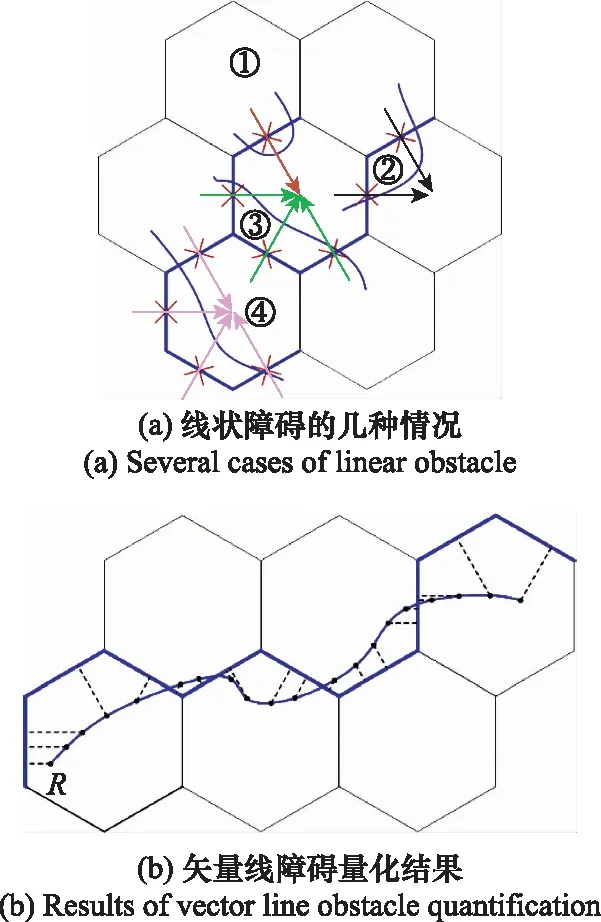
图4 障碍类矢量线六角格建模Fig.4 Modeling of obstacle vector line hexagonal grid
3 部队机动建模
按照部队机动的战场地理环境不同,可将其分为地面机动、海上机动和空中机动,本文重点关注海上机动和地面机动。部队机动受地理环境(地形要素、交通要素、障碍要素)的影响和制约,称为地理环境效能;对抗方作战单位也会对部队机动产生影响,称为作战要素效能。针对部队机动推演,两种效能最终表现在部队的行军时间上,因此又称为时间效能。
3.1 时间效能
海上机动分为水面舰船和水下潜艇的行进。对海上机动影响较大的海洋环境因素主要有海流、海风、水深、海底地形、气温等,这些因素将影响机动路线的选择和航行速度。例如,考虑舰船的吃水深度、潜艇的潜水深度,必须保证水深在安全值以上,方可安全通行;海流会影响舰船的行驶速度,正确利用海流可节省动力损耗。
地面机动分为徒步和借助载具的机动。相较于海上,地面机动所受到的战场地理环境影响更为复杂。通常情况下,能对地面机动产生较大影响和制约的地理环境要素主要有坡度、植被类型、河流障碍物、城市居民地、公路铁路等。合理利用环境要素可加快地面机动,如平原地形、公路铁路运输;部分环境要素会阻碍机动,如山地和高原地形、河流等。
作战要素(如对抗方武器装备、作战单位等)不仅会直接对部队机动造成制约,而且能通过破坏或新建战场地理环境间接影响环境效能,从而影响部队机动。不同于地理环境效能,作战要素影响的区域往往是以武器装备或作战单位为中心的周围覆盖区域。
3.2 时间最短路径计算
部队机动往往需以最短时间到达目的地。本文以Dijkstra算法[27]为基础,结合HHUT编码运算与时间效能模型实现海上及地面时间最短路径规划。通过地理环境建模并根据环境效能和作战要素效能,可计算每个六角格上的部队机动所需时间。由于部队行进路线经过格心,需计算穿越相邻六角格的时间权值,本文将相邻六角格的行军时间取均值作为穿过格边所需的时间权值,对于绑定格边的障碍要素和使用格边辅助计算的交通类要素,改变相应格边的权重。
根据Dijkstra算法的原理,时间最短路径搜索过程就是将格心由临时节点变为永久节点的过程,永久节点组成最终的最短路径编码序列整体计算流程,如图5所示,具体步骤如下。
步骤1初始化起点和终点六角格编码、推演区域内部队机动时间及格边时间权值、区域内临时节点距离起始六角格时间权值之和、最短路径编码序列;
步骤2查询所有临时节点,将时间权值之和最小的节点设为永久节点,记录该编码。判断该永久节点是否是终点,若是则算法结束,输出最短路径编码序列,若不是则执行步骤3;
步骤3查询该永久节点邻近格心编码,若邻近六角格权值之和大于永久节点与格边时间权值之和,则更新该邻近六角格权值之和,跳转至步骤2,并更新最短路径编码序列。
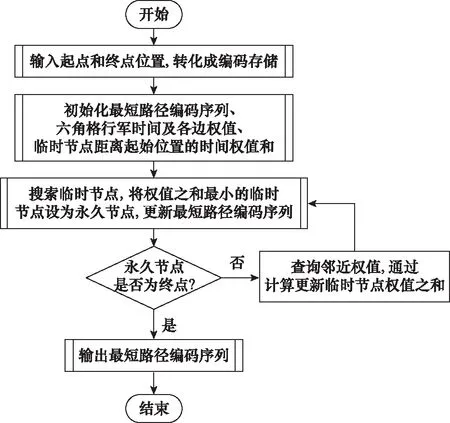
图5 时间最短路径规划计算流程Fig.5 Calculation flowchart of the path planning with the shortest time
4 实验与分析
本文展开综合模拟实验,首先构建兵棋地图海陆战场地理环境模型,再以部队两栖机动作为想定案例,推演计算时间最短路径并加以分析。选择某海域和岛礁作为海陆战场,体现广域、海陆一体特点;多源异构环境数据都在HHUT多分辨率六角格上建模,满足多兵种联合行动的要求。
4.1 兵棋地图多尺度地理环境建模
4.1.1 海战场水深环境
本次实验以海面部队机动为例,舰船航行和登陆受水深影响较大,因此以瞬时水深建立海战场地理环境的简化模型。许军等[28]构建了海域面积约6.35×106km2范围的1′×1′的潮汐模型。根据该模型获得2021年1月1日时间分辨率为1小时的潮位数据,由栅格数据建模方法将潮汐变化值与格心绑定。
将潮位值量化至格心后,获取某时刻球面六角格的潮位值,由海图图载水深值加上潮位值计算海水的瞬时水深[29]。瞬时水深对舰船航行的影响较大,水深的绝对值影响舰船的最大载重;水深须大于舰船的吃水深度,才能保证航行安全。假设某舰船的安全水深为20 m,同时考虑1.5 m的安全高度间隔,则瞬时水深大于21.5 m的区域为安全区,小于21.5 m的区域为危险区。某海域0时刻瞬时水深环境如图6所示,以红色六角格标识危险区。
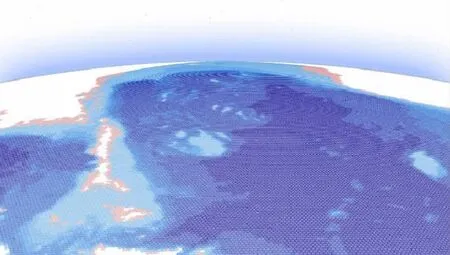
图6 0时刻水深环境局部视角Fig.6 Local visual angle of water depth environment at 0:00 am
4.1.2 陆战场地理环境
采用高程数据、土地利用数据及基础地理数据建立兵棋地图陆地地理环境模型。高程数据选取2009年美国航天局推出的地形数据Aster-DEM[30]。土地利用数据选择国家自然资源部于2020年发行的GlobeLand30[31]数据。河流、铁路、公路及居民地数据来自国家基础地理信息中心发布的2015年全国1∶100万基础地理数据库[32]。由于河流和公路线过于密集,在ArcGIS中选择长度大于15 km的河流,并去除第4级公路以简化数据。该海域α岛第10层~第13层高程数据六角格建模结果如图7所示。
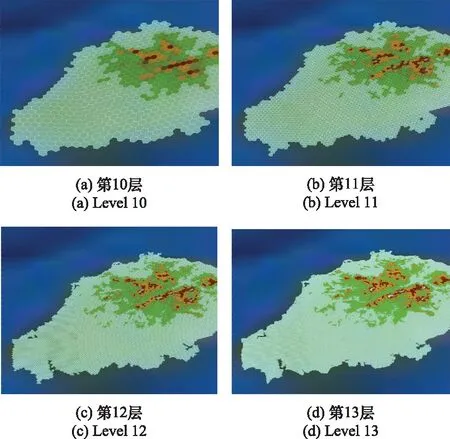
图7 α岛高程数据六角格多尺度建模结果Fig.7 Hexagonal grid multi-scale modeling results of island α elevation data
公路属于交通类要素,采用六角格心建模,并借助格边辅助计算公路的走向。根据交通类矢量线建模算法实现第10层~第11层多尺度公路线六角格建模(白色单元),如图8(a)和图8(c)所示,辅助计算的格边以红色标识。河流既属于交通要素,又是障碍类要素。当作为交通要素时,第10层~第11层多尺度河流线六角格建模(白色单元),如图8(b)和图8(d)所示;当作为障碍类要素时,根据最邻近格边建模方法,实现河流线量化至格边,以蓝色线段标识。居民地属于面状矢量,以六角格心建模,如图8(b)和图8(d)的红色单元所示。
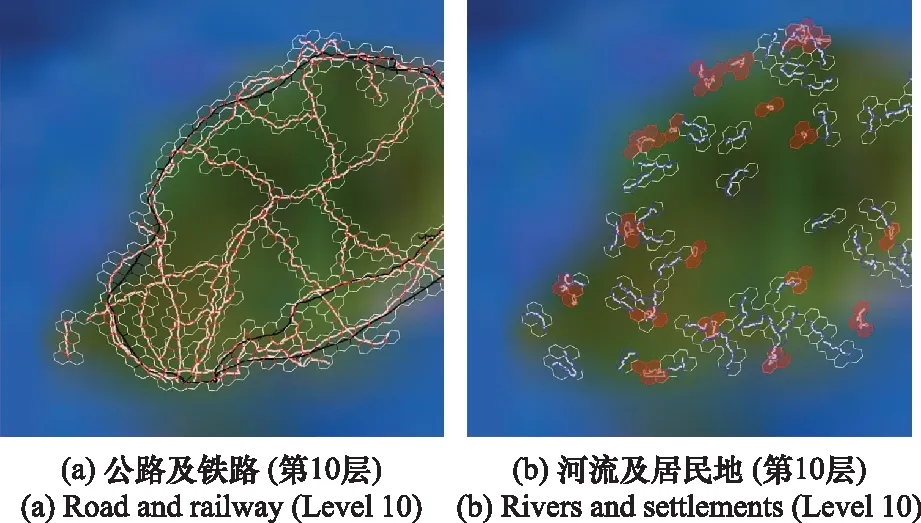
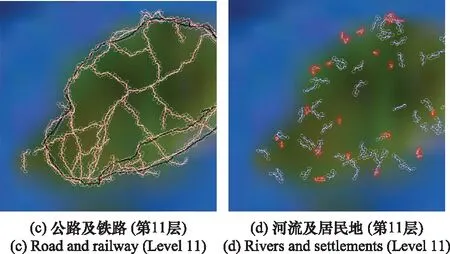
图8 基础地理数据六角格多尺度建模结果Fig.8 Hexagonal grid multi-scale modeling results of basic geographic data
4.2 海陆两栖机动推演
假想对抗双方分别为红方和蓝方,红方为进攻方,蓝方为防守方。将河流作为障碍类要素,若部队穿越相邻六角格时遭遇河流,则不允许通行;铁路、公路为交通要素,可加速部队机动,设定部队优先选择铁路行进。假想若干海兵力部署数据,规定火力点和侦察点有效覆盖半径为10 km;规定部队在火力覆盖范围内通行时间增加3倍,遇到侦察区须避开。2021年1月1日0时红方从陆地S点出发,经海上机动至登岛点,根据时间最短路径算法计算路线编码序列,输出结果如图9所示。进军时间最短路线为:登岛点⟹A⟹A1⟹A2以及登岛点⟹A⟹B1⟹B2⟹B3⟹B4。由于高程直观反映了地势信息,因此选择高程作为兵棋地图的底图,计算时间最短路径,推演进军过程。
由图9可知,海上部队机动能避开水深危险区。陆上机动大致都沿着地势平坦的沿海平原地带,B2⟹B3选择地势较高的区域行军的原因在于沿公路行进,耗时将更短;部队优先选择铁路行进,如A1⟹A2;沿铁路虽绕远,但总体时间最短,如B1⟹B2。总体来看,部队尽可能沿铁路和公路行进,并尽可能避开河流和对抗方兵力部署点,完全符合最短时间路径规划算法及作战推演常识。
图9能直观展现地形信息,但不能直接得到六角格的行军时间及蓝方的火力和侦察范围。时间效能图能直观反映部队在每个六角格的行军时间和火力覆盖范围,可用来验证时间最短路线规划是否正确。部队在单个六角格的行军时间由各类环境要素综合作用后计算得到,如土地类型、高程、作战单位。图10直观反映了蓝方火力分布(蓝色和灰色环状六角格)和红方机动时间分布,T为地面六角格时间值,单位为min。由图10可知,红方能正确绕开蓝方侦查点(B3⟹B4)。在邻近铁路和公路被蓝方火力控制时,能够绕行较远的铁路和公路线(A⟹A1)。在蓝方控制的铁路和公路线较短时,红方选择穿过蓝方火力范围(A⟹B1),达到了行军时间最短的目的,符合算法要求和推演规则。

图9 α岛两栖部队机动推演(0时刻)Fig.9 Marching deduction of amphibions forces in α island (time 0:00)
4.3 实验分析
根据实验结果,作出如下分析:
(1) 图6~图8验证了本文栅格和矢量数据量化至全球六角格的可行性。不同空间基准的栅格数据(高程、土地类型、水深)在六角格中实现了空间基准统一的建模,避免了传统平面兵棋地图[33]在跨投影带时需拼接数据的不便和由投影边界变形严重导致推演结果不可信的不足。相较于采用七孔径H3建立战场环境的方案[16],本文提出的HHUT格网孔径更小(四孔),多尺度数据组织能力更强。
(2) 相较于现有平面六角格兵棋地图,基于HHUT格网方案构建的球面六角格兵棋地图具有如下优势:① 作战推演区域大。本文虽然以某海域为例,但是按照全球六角格网构建模型可实现大范围甚至全球范围的战场地理环境建模。由于等积六角格在全球范围内分布均匀,在推演区域扩大时依然保持可控变形,可有效避免现有的由兵棋地图投影变形大而导致的计算不收敛的问题。② 具有多尺度特征。由栅格和矢量数据建模实验结果(如图7和图8所示)可知,本文数据建模方案可将战场地理环境数据通过六角格实现多尺度关联,不同尺度六角格之间通过编码层次计算可实现数据聚合与分解,有利于满足不同级别的作战推演需求。而现有兵棋地图按照实际应用需求构建单尺度地图,无法实现跨层级推演结果的传递,灵活度不高。
(3) 本文将多源异构数据融合至格网系统中,经数据共同作用计算出部队机动的时间效能(图10)。不同类型、属性的数据在六角格中通过编码运算实现同构化处理,在计算时可直接实现对数据的调度,易于程序实现。利用六角格战场环境模型联合计算实现了部队机动时间最短路径规划(图9和图10),实验结果验证了全部方案的可行性,有望为战场地理环境建模和事件模拟推演提供有效支撑。
5 结束语
在国家核心利益维护的刚性需求牵引下,需要面向全球建立兵棋地图和推演模型。本文基于六边形DGGS研究了兵棋地图广域战场地理环境多尺度建模与部队机动推演,并结合想定案例加以验证。实验结果表明,六边形DGGS兼具数据建模和分析计算优势,既可用于构建海陆广域兵棋地图,又可作为作战模拟与推演的统一计算框架,弥补现有兵棋地图的缺陷,具有较好的应用前景。
下一步工作重点将关注全球六角格兵棋地图建模的效率和精度,设计定量化的评价指标。同时,将球面兵棋地图扩展至三维空间,引入时间维度,建立全域时空一致的兵棋推演框架。
